一种稻麦油多用割前脱粒半喂入式联合收割机的制作方法
一种稻麦油多用割前脱粒半喂入式联合收割机
1.本发明涉及一种稻麦油多用割前脱粒半喂入式联合收割机。
2.目前,国内外使用的收割机,不论是全喂入式或半喂入式,都要先把禾杆割断,送脱粒机内高速旋转碰击,使谷物与草杆分离。这种脱粒方式由于线速度过高,带来如下缺陷:1,消耗很大的动力,收割油耗成本高;2,脱粒线速度过高,把谷粒打成内伤,碎米率过高,降低谷物的经济价质;3,雨天或有露水,水田的倒伏禾等,只要禾杆上有水汽,谷物就包裹在禾草中无法分离,由此造成收获季节遇到乆日下雨,看着成熟的粮食烂掉在地里,也无法收回;4,更让人头痛的是:由于现有机型结构复杂,导致机身过重,时常被陷入田里无法动弹,要请挖机来帮忙拖出,又误工作时间还要出拖出的钱;5,制造成本高,增加用户购买难度;6,机体过重,很难下深泥脚田作业,还常常压坏土壤,适应性不强,在山区无法使用。
3.本发明的目的,提供一种割前脱粒稲、麦、油多用半喂入式联合收割机,解决现有割后脱粒机型凸显出的上述缺陷。
4.本发明的构造是:前方横置一个拨禾轮,拨禾轮上装有多根拨禾轴,每根拨禾轴下边吊着多根朝后弯曲的拨禾指,拨禾轮两边的轮盘上还套有传动带,该传动带上对称紧固多根压禾棍,该传动带绕过下方支撑轮后,挨脱粒机构上行,绕过驱动轮后连接成环型,拨禾轮下方一侧的机架上装有导轨,由拨禾轮和传动带及导轨三者共同组成拨禾和喂禾两项功能的机构;拨禾轮的后下方是朝前顷斜的接谷斗,该接谷斗的前沿朝上圈起成半圆型,接谷斗内装有带梳齿的柔性输送带,该带梳齿的柔性输送带和接谷斗共同组成脱粒和纵向输送两种功能的机构;柔性输送带后方是横置的谷渣分离器,谷渣分离器下边是谷粒收集器,由谷渣分离器和谷粒收集器及之间的隔筛三者共同构成谷渣分离和分开横向收集,分开喂入五项功能的机构;分开收集机构后边是纵向斜式清选器,该纵向斜式清选器前端紧贴谷渣分离器出料口,后端轴上套装有吸风机,斜式清选器下边是谷粒进粮仓器,纵向斜式清选器和谷物进粮仓器之间装有筛网,由纵向斜式清选器和谷物进仓器及筛网与风机四者共同组成谷渣再次清选和谷粒直接进粮仓机构;接谷斗前沿装有禾杆切割器,切割器的上方及机身左右两边朝后斜上到后方成环型的输送链与后方下边的轧草刀三者共同组成禾杆切割、输送、轧碎三项功能的机构。
5.本发明的工作原理是:拨禾轮转动时,每根拨禾轴上的多个拨禾指挖进前方直立或倒伏的禾杆内往后拨,转到正下边时,拨禾指朝后趐起来,把挖住的禾杆喂进脱粒区内,再由传动带上的多根压禾棍轮流运动,把禾杆压在脱粒区柔性输送带上无法台头,由拨禾轮,导轨,压禾棍三者共同完成拨禾和喂入两项功能的任务;柔性输送带上的梳齿以不快不慢的线速度运动,把有米的谷粒梳脱,空壳还保留在禾杆上,梳脱的谷粒掉在运动着地柔性输送带上,由柔性输送带在带动梳齿脱粒的同时,还要把谷粒输送到谷渣分离器内,完成脱粒和纵向输送两项功能的任务;谷渣分离器的旋转搅拌,使谷粒经过筛网孔掉进横向收集器内,又把断穗及残叶往中收集、并甩开,由横向收集器把谷粒向中间推拢、并掉进耙谷槽内,经过谷渣分离器和筛网及横向收集器三者共同完成谷渣分离、断穗集中和喂入,谷粒集中和喂入五项功能的任务;由谷渣分离器把断穗和残叶喂进纵向斜式清选器的前腔内,纵向斜式清选器在旋转滚打使谷渣再次分离的同,还把残渣往后输送,谷粒经过筛网孔下掉
在耙谷槽内,残渣由后方的风机叶片侧也砍碎后吹离机身,谷粒直接耙进粮仓。梳脱谷物的同时,机身朝前运动,正在脱粒的禾杆生长在地里有抗拉力,以接谷斗来说,禾杆的根部从前方往接谷斗下边和后方运动,实际上禾杆根部从前方运动到接谷斗前沿这段时间内,进入接谷斗内的禾杆由短变长,穗头上的谷物已经过多次梳脱,且绝对脱干净了;当禾杆根部从接谷斗下边往后运动时,由根部把禾杆从接谷斗内往外拖,禾杆在接谷斗内由长变短,并且这批禾杆压在最底层,还会把上层脱掉的谷粒包裹在叶片中往外拖,而造成浪费,为处理这种浪费现象,就要确保接谷斗内的禾杆不被拖出,才能切底解决在此浪费的发生,因此,在接谷斗前沿横向装上禾杆切割器,把往接谷斗外拖的禾杆割断,并用输送链夹住割断的禾杆,用大于或等于机身前进速度,横向输送到一边后,从侧边倒提起来一边朝后运动,一边把包裹在叶片中的谷粒抖掉在接谷斗内,再把禾草输送到机身后方,轧碎后还田做肥料或打捆另用。
6.本发明的优点:1,借助禾杆生长在地里的抗拉力用极低的线速度梳脱有米的谷物,空壳还长在禾杆上,节省三分之二的动力燃油消耗,大大降低收割成本。
7.2,采用低线速度梳脱谷物,不会损伤米质,提高谷物的出整米率,创造谷物的经济价值。
8.3,由于谷物是从生长在田间的禾杆上直接梳取,不论禾杆上有水无水,晴天雨天一样作业,从根本上解决了乆日下雨,谷物烂在地里无法收回的难题,并且越是禾杆潮湿,越不会梳断谷穗和残草及空壳。
9.4,相对于现有的割后脱粒半喂入式和全喂入式收割机,结构简单,降低生产成本。
10.5,机体超轻,减轻了压坏土壤,还能在现有机型去不了的深泥脚田和深水田及山区小田块作业,适应范围更广。
11.6,脱粒时没有损失率,清选时损失率极少,真正做到可粒归仓。
12.7,完整的禾杆便于收集另作用途,也可轧碎返田作有机肥用。
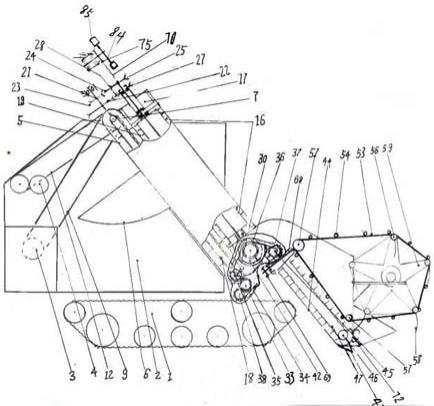
13.为了更清楚表述本发明的具体内容,采用附图进行讲述:图1是本发明的整体结构布置侧视图,图2是图1的传动顶视意示图,图3是图1的纵向斜式清选输送横裁面图,图4是图1横向收集及谷渣分离裁面图,图5是图1的拨禾轴定位盘,图6是图2的导轨图,图7是图1的输草夹持图,图8是图1的输草动力传递图。
14.为了清渐表述本发明的全过程,把各图中的部件名称用序号分开表示:1一行走机构
ꢀꢀꢀ
2一储粮机构
ꢀꢀꢀ
3一动力轮
ꢀꢀꢀ
4一轧草机构
ꢀꢀꢀ
5一谷粒进粮仓器
ꢀꢀꢀ
6一弧型防漏板
ꢀꢀꢀ
7一总动力轴
ꢀꢀꢀ
8一总动力接收轮
ꢀꢀꢀ
9一总传动带
ꢀꢀꢀ
10一轧草动力输出轮
ꢀꢀꢀ
11一轧草传动带
ꢀꢀꢀ
12一轧草传动轮
ꢀꢀꢀ
13一轧草主动轴
ꢀꢀꢀ
14一轧草从动轴
ꢀꢀꢀ
15一轧草传动齿轮
ꢀꢀꢀ
16一搅拌滚筒
ꢀꢀꢀ
17一风机叶轮
ꢀꢀꢀ
18一带多个耙子的传动带
ꢀꢀꢀ
19一搅拌滚筒的弧形筛网
ꢀꢀꢀ
20一清选及输送锥齿轮
ꢀꢀꢀ
21一交叉过桥轴
ꢀꢀꢀ
22一风机传动轮
ꢀꢀꢀ
23一清选传动轮
ꢀꢀꢀ
24一清选传动带
ꢀꢀꢀ
25一清选传动轮
ꢀꢀꢀ
26一耙子
ꢀꢀꢀ
27一风机动力轮
ꢀꢀꢀ
28一风机传动带
ꢀꢀꢀ
29一多用传动轮
ꢀꢀꢀ
30一谷粒收集器
ꢀꢀꢀ
31一传动过桥轴
ꢀꢀꢀ
32一过桥动力轮
ꢀꢀꢀ
33一多用传动轮
ꢀꢀꢀ
34一多用传动带
ꢀꢀꢀ
35一谷粒收集器动力轮
ꢀꢀꢀ
36一谷渣分离器动力轮
ꢀꢀꢀ
37一脱粒动力轮
ꢀꢀꢀ
38一张紧轮
ꢀꢀꢀ
39一偏头轴承座
ꢀꢀꢀ
40一连杆
ꢀꢀꢀ
41一动刀组
ꢀꢀ
42一谷渣分离器
ꢀꢀꢀꢀ
43一导轨
ꢀꢀꢀ
44一接谷斗
ꢀꢀꢀ
45一脱粒驱动滚
ꢀꢀꢀ
46一支撑滚
ꢀꢀꢀ
47一输送带
ꢀꢀꢀ
48一变速动力传动带
ꢀꢀꢀ
49一喂禾拨禾输草动力轮
ꢀꢀꢀ
50一喂禾拨禾输草动力轴
ꢀꢀꢀ
51一拨禾和喂禾动力轮
ꢀꢀꢀ
52一交叉传动锥齿轮
ꢀꢀꢀ
53一传动带
ꢀꢀꢀ
54一压禾棍
ꢀꢀꢀ
55一拨禾轮
ꢀꢀꢀ
56一拨禾轴
ꢀꢀꢀ
57一喂禾支撑轮
ꢀꢀꢀ
58一拨禾指
ꢀꢀꢀ
59一拨禾盘
ꢀꢀꢀ
60一垂直拐柄
ꢀꢀꢀ
61一操控把
ꢀꢀꢀ
62一伸缩u型座
ꢀꢀꢀ
63一定位盘
ꢀꢀꢀ
64一拉簧
ꢀꢀꢀ
65一托轮
ꢀꢀꢀ
66一滚轮
ꢀꢀꢀ
67输草锥齿轮
ꢀꢀꢀ
68一输草传动轴
ꢀꢀꢀ
69一输草传动链轮
ꢀꢀꢀ
70一输草链条
ꢀꢀꢀ
71一张紧轮
ꢀꢀꢀ
72一一号支撑轮
ꢀꢀꢀ
73一二号支撑轮
ꢀꢀꢀ
74一三号共用链轮
ꢀꢀꢀ
75一四号支撑轮
ꢀꢀꢀ
76一压草弹条
ꢀꢀꢀ
77一操控把运动轨迹线
ꢀꢀꢀ
78一导向条
ꢀꢀꢀ
79一出料口
ꢀꢀꢀ
80一横向筛网
ꢀꢀꢀ
81定位销
ꢀꢀꢀ
83一夹板
ꢀꢀꢀ
84一甩草盘
ꢀꢀꢀ
85一甩草叶片 。
15.为了详细表述本发明的具体实施方案,针对附图从结构布置;传动过程;工作原理三个方面进行详述:一,结构布置:图1所示整体由行走机构1和储粮机构2及工作机构3一85三部分组成,本发明只提工作机构与储粮机构的结构位置布局,重点表述工作机构的详细过程:(一),工作机构与储粮机构的结构布局:动力机固定在行走机构1的后端上.,动力机上方固定燃油箱和轧草机构4,行走机构的正上方固定储粮机构2,该储粮机构左右两边及前方垂直成柜型,上顶中间纵向开有与工作机构的谷粒进粮仓器5宽窄相同,底面斜度一至的槽,该槽的两边封闭,底面以弧型防漏板6为界,下方封闭,上方全长都是进料口,储粮机构一边的前方挖掉一块,构成操作台位置。
16.(二),工作机构:以工作原理的先后分成拨禾和喂禾系统;脱粒系统;横向收集和谷渣分离系统;纵向斜式清选及输送系统;禾杆切割及输送与轧碎系统五部分。还有,从动力传递的先后次序,又分成恒速传动和变速传动两条路线:为了清楚表述各系统之间的关系,根据动力传递路线的连惯性,从动力传递始末途径,逐渐表述每个系统的关联及布局:工作机构与储粮机构的联接点是以总动力轴7的轴心线为支点,横置在储粮机构的顶面上,工作机构的整体能以该支点为圆心,以前方的多个系统为半径,在外力的作用下,能使前方各系统整体升降,达到调节禾杆高低都能收割的效果;图2所示的总动力轴7两头装有轴承座,轴承座固定在机架上,支撑着该轴能转动,该轴端头装有总动力接收轮8,该总动力接收轮上套有总传动带9,总传动带的另一头套在动力机的动力轮3上,总动力轴上装有轧草动力输出轮10,该动力输出轮上套有轧草传动带11,该轧草传动带另一头套在轧草动力轮12上,该轧草动力轮紧固在轧草主动轴13上,轧草主动轴和轧草从动轴14的两头都装有轴承座,轴
ę
座固定在壳体上,支撑着两轴能转动,两轴中部紧固多对对称的滚刀,两轴另一端头装有咬合的传动齿轮15,主动轴转动时,经过该咬合的齿轮使从动轴产生对转。
17.纵向斜式清选及谷粒输送系统:该系统的构造图3所示横裁面成方型的壳体内,上方装有搅拌滚筒16,图1和图2所示和风机叶轮17,图3所示下方装有带多个耙子26的传动带18,搅拌滚筒和耙子之间装有弧形筛网19隔着,搅拌滚筒和风机叶轮上半部分还有半圆型盖子,搅拌滚筒上方的盖子内面还斜向紧固多根导向条78,弧形筛网两边下方有抬枋托着;斜式清选机构下底托着传动带上的多个耙子26,底面上半部有与储粮仓内相通的出料口79,出料口下端面是图1所示的插入储粮仓内的弧型防漏板6;图2所示传动总动力轴7的另一头紧固清选传动锥齿轮20,该锥齿轮上咬合着交叉过桥轴21的传动锥齿轮,该过桥轴上两头装有轴承座,轴承座固定在机架上,支撑着该过桥轴能转动,该轴中部装有风机传动轮
22和清选传动轮23,清选传动轮23上套有清选传动带24,该传动带的另一头套在清选动力轮25上,该清选动力轮紧固在搅拌滚筒16的轴端头,该搅拌滚筒的轴两头装有轴承座,轴承座固定在壳体上,支撑着该搅拌滚筒能转动,该搅拌滚筒的中部紧固多排搅拌棍,每根搅拌棍上紧固多个搅拌齿,搅拌滚筒的后轴上还装有能单独转动的风机叶轮26,该风机叶轮的后头紧固风机动力轮27,该风机动力轮上套有风机传动带28,风机传动带的另一头套在风机传动轮18上;总动力轴7中部还装有耙谷进粮仓、横向收集谷粒、谷渣分离、从禾杆上梳取谷粒、割草、多用传动轮29,该多用传动轮上套着多用传动带18,该多用传动带上装有多个耙子26,该装有多个耙子的多用传动带另一头经过谷粒收集器30的上边和下边后,套在传动过桥轴31的动力轮32上,传动过桥轴两头装有轴承座,轴承座固定在机架上,支撑着该传动过桥轴能转动,当总动力轴7和多用传动轮29转动时,经过装有多个耙子的多用传动带18能带动传动过桥轴31和动力轮32转动。
18.动力分开传递系统:传动过桥轴31的另一头上紧固谷粒横向收集、谷渣分离、从禾杆上梳取谷粒多用传动轮33,该多用传动轮上套有多用传动带34,该多用传动带的背面经过图1所示横行包裹谷粒收集器动力轮35后往上行,包裹谷渣分离器动力轮36后反向横行,包裹脱粒动力轮37后往下行,包裹张紧轮38后,回到多用传动轮33上成环型,当多用传动轮转动时,能同时带动谷粒收集器、谷渣分离器、脱粒器三者产生转动,并转动方向相同,都与多用传动轮转向相反。
19.禾杆切割系统:图2所示传动过桥轴31端头还紧固偏头轴承座39,(图中未画)偏头轴承座上对称朝外伸出两个销轴,两个销轴上套在连杆40的两个对称挂耳朵孔内,当传动过桥轴转动时,偏头轴承座就产生摆动,由偏头轴承座对称的两个销轴推拉着连杆上对称的两个挂耳朵,使连杆能产生往返转动,连杆的另一头装有轴承座,轴承座固定在机架上,支撑着连杆能往返转动,该连杆端头紧固拐轴,拐轴另一头装有推拉杆,推拉杆另一头连接图2所示割草的动刀组41,当连杆往返转动时,拐轴产生摆动距离,经过推拉杆推拉着动刀组产生往返运动。
20.横向收集谷粒及谷渣分离系统:图4所示在一个横置的u型槽为壳体,壳体内上方装有谷渣分离器42,图2所示该谷渣分离器两头装有轴承座,轴承座固定在壳体两端的板上,支撑着谷渣分离器能转动,谷渣分离器一头的轴穿出轴承座外,在穿出的轴头上紧固动力轮36,该动力轮上套着多用传动带34,谷渣分离器中段的两头,朝中紧固旋向相反的螺旋叶片,两头的螺旋叶片旋转到中间时,接合在轴向紧固的直叶片上;图4所示该谷渣分离器的下半部装有弧形筛网80;该筛网下的u型槽内装有谷粒收集器30,图2所示该谷粒收集器两头装有轴承座,轴承座固定在两头的端板上,支撑着谷粒收集器能转动,谷粒收集器中段,两头朝中间紧固旋转方向相反的螺旋叶片,两边的螺旋叶片旋转到中间时,空留着图3所示带多个耙子的传动带18上的耙子26能通过的距离;图2所示谷粒收集器一头的轴头穿出轴承座外,在穿出的轴端头紧固动力轮35,该动力轮上套有多用传动带34。
21.脱粒系统:图1所示的前低后高接谷斗44前沿朝上圈成半圆型,左右两边紧固在机架上,后方与图4所示的u型槽紧固,该接谷斗内装有图1所示的脱粒驱动滚45,该驱动滚的两头装有图2所示的轴承座,轴承座固定在机架上,支撑着驱动滚能转动,一头的轴头穿出轴承座外,在穿出的轴端头紧固动力轮37,该动力轮上套有多用传动带34;接谷斗下方的半圆型壳体内,装有图1所示的支撑滚46,支撑滚两头装有图2所示的轴承座,轴承座固定在机
架上,支撑着支撑滚能转动;图1所示在驱动滚和支撑滚上套着柔性输送带47,柔性输送带上紧固多排梳齿,每排梳齿相邻错位布置;当驱动滚转动时,能带动输送带及梳齿包裹着支撑滚转动,使输送带及梳齿上下两面产生平行运动。
22.拨禾和喂禾系统及禾草输送系统两部分的转速要随行走速度的快慢变化而变化,才能步调一至,确保喂入接谷斗内的禾穗有足够的脱粒时间。因此,其动力必须要从行走变速箱内变速后的轴上再传递出来,本发明不细述变速箱内这一变速后的动力输出机构,只从变速后的动力输送过程进行细述,该两个系统的的动力传递是连惯性的,就夹在一起进行表述:图2所示变速动力传动带48,套在喂禾、拨禾、禾草输送的多用动力轮49上,该动力轮紧固在喂禾、拨禾、输草动力轴50的端头,该动力轴两头装有轴承座,轴承座固定在两边的机架上,支撑着该动力轴能转动,该动力轴的两个轴承座内紧固拨禾和喂禾动力轮51,该动力轴的另一头也伸出轴承座外,在伸出的轴端头紧固交叉传动锥齿轮52:其中的拨禾和喂禾系统由两个喂禾传动轮51上,套有传动带53,传动带上对称紧固多根压禾棍54,图1所示传动带53从上方包裹拨禾轮55上的多排拨禾轴56后,又绕过喂禾支撑轮57,再回到拨禾及喂禾传动轮51上成环型,该传动带上紧固的多根压禾棍54的间距,正好是每个拨禾轴56挨后都有一根,两个拨禾轴之间还有一根或多根;拨禾及喂禾传动轮51和喂禾支撑轮57的高低位置是以柔性输送带47上的梳齿高度为基准,确保圧禾棍54上行时,不与运动中的梳齿尖相碰为宜;每根拨禾轴56上都朝下吊着多根弧形并有弹力的拨禾指58,图2所示每根拨禾轴两头都套装在支撑座内,两头的每个支撑座对称固定在拨禾盘59上,支撑着拨禾轴能转动,每根拨禾轴的一头,都伸出支撑座外,在伸出的拨禾轴端头紧固垂直拐柄60,垂直拐柄的方向与拨禾指方向相反,垂直拐抦的另一头紧固操控把61,操控把的方向与拨禾轴平行,操控杷上套有图5所示的即能伸缩,又能摆动的u型座62,该u型座的内把是扁平体,扁平体的中间开有滑槽,滑槽内穿有定位销81,定位销固定在限位盘63上,控制着u型座以定位销为基准的移位,u型座内把的端头,挂有拉簧64,拉簧的另一头拴在内面上,由该拉簧经过扁平体把u型座及操控把61往定位盘中央拉着;定位盘内圈的内壁上分段有托轮65支撑着,托轮的内轴固定在机架上,控制着定位盘能转动;图2所示操控把的端头穿出伸缩u型座外,在伸出的操控把上装有滚轮66,该滚轮随拨禾轮、定位盘一体旋转到下方时,进入图6所示的导轨槽43内,由于导轨槽相对于定位盘及操控把规定的运动轨迹线77产生朝下径向变化,使滚轮66碰到导轨的上壁就朝后让动,推着操控把和垂直拐柄,以拨禾盘上的支撑座为圆心,还带着定位盘上的伸缩u型座一起朝下摆动,由导轨槽给操控把传递的摆动力,经过垂直拐柄使拨禾轴产生旋转,经过拨禾抽的旋转力使拨禾指朝后趐起;当喂禾拨禾动力轴50和喂禾拨禾传动轮51转动时,经过传动带53带动拨禾轮及定向盘转动的同时,还带动多根压禾棍一起运动。
23.还有禾草输送:图2和图8所示的交叉传动的锥齿轮52上,咬合着输草锥齿轮67,该输草锥齿轮紧固在图8和图1所示的输草传动轴68一头,该输草传动轴中装有轴承座,轴承座固定在机架上,支撑着该传动轴能转动,该传动轴的另一端头紧固输草传动链轮69,图2所示输草传动链轮69上,套有输草链条70,该输草链条上套有张紧轮71,输草链条绕过前方的一号支撑轮72后,从横置的动刀组41上边经过,又绕过前边的二号支撑轮73,往后上方直去,绕到后三号甩草和支撑共链轮74上,该共用链轮下方装有多个轴承共用的长型轴承座,该长型轴承座固定在机架上,支撑着该共用链轮能抟动,链轮上方装有甩草盘84,甩草盘上
紧固多个甩草叶片85;输草链条接着横向经过后四号支撑轮75,还要往前下方直行,回到输草传动链轮69上成环型;当输草传动铤轮转动时,能带动输草链条产生环型运动;输草链条在动刀组全长度的上边,有图7所示的多根压草弹条76压着,该压草弹条朝前下方折弯后,再朝后方直插、并紧固在动刀组下边的定刀组上,弹条的上端头朝输草链条的去向方布置、并弹性压在输草链条的上下夹板83之间的滚套上;从二号支撑轮到三号支撑轮之间,输草链条的外侧一至有弹性压条压着(图中未画),该弹性压条绕过三号支撑轮后遂渐松开,失去压草的能力。
24.二,传动过程:(一)恒速传动,图1所示发动机发出的动力由动力轮3输出,经过工作机构的总传动带9,带动图2所示总动力接收轮8及总动力轴7、轧草动力输出轮10、耙谷和横向收集及脱粒与割草多用传动轮29、清选锥齿轮20三个传动轮同步转动:其中轧草动力输出轮10经过轧草传动带11带动轧草传动轮12及轧草主动轴13和紧固在该主动轴上的多个滚刀产生转动,由主动轴另一头上的轧草传动齿轮15把动力传递给轧草从动轴上的传动齿轮15,使从动轴和紧固在该从动轴上的滚刀产生对滚。
25.总动力轴7另一端头的锥齿轮20把动力传递给相咬合的锥齿轮,使交叉过桥轴21及紧固在该过桥轴上的风机传动轮22与清选传动轮23同时转动:其中风机传动轮22经过风机传动带28,带动风机动力轮27及风机叶轮17产生转动;清选传动轮23经过清选传动带24,带动清选动力轮25及搅拌滚筒16产生转动。
26.耙谷、横向收集、谷渣分离、脱粒与割草多用传动轮29,经过长有多个耙子的传动带18,带动过桥动力轮32及传动过桥轴31和多用传动轮33与偏心轴承座39,产生同步转动:其中偏心轴承座39的轴心线与传动过桥轴31的轴心线,产生的交叉角度,使偏心轴承座在转动的同时,外壳不转动时就产生摆动,这种摆动力推拉着连杆40产生往返转动,连杆另一头的拐轴推拉着动刀组41产生往返运动。
27.多用传动轮33经过多用传动带34的背面带动图1所示的谷粒收集动力轮35、谷渣分离动力轮36、脱粒动力轮37、张紧轮38四个,产生与多用传动轮33反方向转动;其中动力轮35带动谷粒收集器30转动;动力轮36带动谷渣分离器42转动;动力轮37带动脱粒驱动滚45转动,再由脱粒驱动滚45带动有梳齿的柔性输送带47,在支撑滚46绷紧作用下产生运动。
28.(二)变速传动:经过行走变速箱变速后的动力,由图2所示变速动力传动带48,带动拨禾、喂禾和输草动力轴50及紧固在该动力轴上的拨禾和喂禾共用动力轮51、输草交叉传动锥齿轮52同步转动:其中拨禾和喂禾动力轮51的动力经过传动带53,带动图1所示多个拨禾轴56的两头支撑座,使拨禾盘59及图2所示拨禾轮55产生转动的同时,还带动图1所示传动带上的多个压禾棍54,绕过喂禾支撑轮57后一体运动;拨禾盘转动的力,经过图2所示多个操控把61,带动定位盘63,绕图5所示的多个托轮65转动,(无图)由于定位盘的圆心线在拨禾轮轴心线的上方,不论转到任何角度,垂直拐柄60始终保持着垂直状态,又因为图2所示拨禾指58与垂直拐柄对称,所以拨禾指转到任何角度,始终保持下垂状态,当每个操控把61转到下方时,图2所示操控把上的滚轮66,进入图6所示的导轨43内,由于导轨的轨迹线下斜于操控把运动轨迹线77,滚轮碰到导轨的上壁,迫使操控把61朝下让动,这时的操控把强拉着伸缩u型座,克服拉簧64的拉力后往下方伸出,经过图2所示垂直拐柄60,纽着拨禾轴56转动,经过拨禾轴的转动力使拨禾指58往上撬起,(无图)滚轮66离开导轨47后端,脱离了
压力,由拉簧64的拉力使操控把61及伸缩u型座62上缩进原位,拨禾指58随即下垂到原位。
29.图2所示输草交叉传动锥齿轮52,带动图8所示输草锥齿轮67及输草传动轴68和输草传动链轮69产生转动,使套在图2所示输草传动链轮69上的输草链条70,在张紧轮71的侧压包裹作用下和一号支撑轮72、二号支撑轮73、三号甩草和支撑共用链轮74、四号支撑轮75的绷紧作用下产生运动,其中三号甩草和支撑共用链轮上方的甩草盘84和甩草叶片85的半径大于该链轮74的半径,因此,甩草盘和甩草叶片转动的线速度比链轮的转动线速度要快。
30.三,工作原理:为了更详细表述一个动着有多个作用,达到最大程度简化结构的目的,从拨禾和喂禾,脱粒和输送,谷渣分离和横向收集,纵向斜式清选和输送,割草、输草、轧草或堆放(五)个方面以次表述:(一),在机身前行的运动状态下,拨禾轮的转动线速度,随着机身前行的速度快漫变化而成比质相同的变化,不论行走速度快或慢,拨禾轮转动的线速度,控制在快于行走速度;工作原理是:拨禾指转动到前方时,从直立的禾穗顶上或倒伏的禾杆腰部往下插进去往后拖,拨禾指转动到正下方后,朝后撬起来运动,把禾杆一根不漏地送到接谷斗内后,拨禾指立即回到下垂的原位继续运动,这时的禾杆蔸部还在前方地里长着,禾杆处于朝后倾斜状态,禾杆随时有朝前反弹的力,为了使进入接谷斗内的禾杆不再反弹,采用传动带上的多根压禾棍,轮流压住禾杆无法抬头,因多根拨禾轴轮流往接谷斗内拨送禾杆。还有,后进来的禾杆把先进来的的禾杆一层又一层往下压,喂进脱粒梳齿上。
31.(二),脱粒和输送:柔性输送带和脱粒梳齿在后上方随图2所示脱粒驱动滚45往下行,在接谷斗内直线往前下斜运动到前下方,随图1所示支撑滚46往上翻,越过接谷斗前沿的半圆弧后露出来,往后上方直线斜行,上面的脱粒梳齿在梳顺禾杆的同时,由于相邻梳齿的间距较窄,前排和后排的梳齿位置错开,再加上运动的线速度惯性配合,一排排接二连三的梳齿错位轮流碰撞在禾杆左右两边,使禾穗极速摆动,有米粒的谷子因重量的惯性,无法随着禾穗超快速摇晃,被前后多排梳齿左右夹碰梳脱了;无米粒的空壳则比禾杆还要轻,能随禾杆超快速摆动,躲过了梳齿的碰梳力,保留在禾杆上,因此,不要再从谷粒中清选空壳的过程了,达到既省动力,又不打伤谷物的有益效果;还有,万一有从后上方带进接谷斗内的谷粒,溜到前沿的半圆弧形处,也会被脱粒梳齿再挂上去,杜绝脱粒中的浪费;再就是拨禾的线速度即要快于行走速度,又要随行走速度的快慢变化而变化的比例不变;即要保证递一次拨进来的禾杆穗子全部进入接谷斗内,才能确保脱粒时不往地里掉谷粒,还要确保每次拨进接谷斗内的禾杆,要有几个拨禾轴经过的时间还处于脱粒阶段,才能脱净谷粒;梳脱的谷粒掉在柔性输送带上面,被柔性输送带的运动惯性,把谷粒送到上止点后,抛进谷渣分离器内。
32.(三),撗向收集和谷渣分离:抛进谷渣分离器内的谷粒中,含有极少受过病虫害的断穗和残叶,用谷渣分离器旋转时产生的搅动力,使谷粒经过筛网孔掉进横向收集器内,断穗和残叶由谷渣分离器上的螺旋叶片推到中间,再由轴向叶片把断穗和残叶抛进纵向斜式清选腔内;掉进横向收集器内的谷粒,由螺旋转叶片转动着推到中间。
33.(四),纵向斜式清选及输送,图1和图3所示搅拌滚筒16上的多排搅齿,挂住断穗和残叶周围转动,旋转时产生离心力,转到上方时,碰到盖内朝后斜置的导向条78,断穗和残叶紧贴着导向条朝后移动,转到下方时,碰到筛网19,挂掉的谷粒从筛孔中漏下,断穗和残叶一边转动,一边往后上方移位,移到后上止点时,断穗上的谷粒早己挂脱干净了,残渣被
图1和图2所示高速旋转的风机叶轮17的刃口砍成碎渣吹出机后;风机第二个作用,使清选腔内产生负压,一则吸走脱粒过程中产生的灰尘,保护操作者的环境;二则吸走谷粒中的灰尘,使谷粒更干净;图1和图3所示传动带18上的多个耙子26,从靠近弧形筛网19处斜下,经过图2所示谷粒收集器上方后,绕过挢动力轮,又从谷粒收集器的下边,往后上方运动到止点轮流循环,把谷粒收集器朝中推来的谷粒直接耙进储粮机构内,确保谷粒不被打伤;要重点表述的事,为了粮仓前后均匀装粮,谷粒进粮仓器5下方一半开着长长的出粮口,空粮仓时,谷粒从最下口流进粮仓,随着粮仓内谷粒增加,增加的谷粒自动堵住下方的出谷口,耙子就把谷粒往上出谷口耙,至到装满整个粮仓;还有,根据禾杆的高矮不同,工作机构要调节高低,插进粮仓内的弧形防漏板6的弧形半径,等于总动力轴7的轴心线到弧形板的直线距离,因此,无论工作机构随意升降,弧形板的底面始终贴着粮仓口的对应处而过,确保不漏谷粒。
34.(五),割草,输送,轧碎:割草的原理是先脱粒后割草,要联接着脱粒(二)的过程讲起,多根拨禾轴和多根压禾棍轮流把先拨进接谷斗内的禾杆一层又一层往下压的同时,机身正在往前行走,相对接谷斗而言,每根拨禾轴拨进来的禾杆的蔸部,都是从前方来到下方、再往后方离去的过程;再从进入接谷斗内禾杆的长短变化来看,禾杆蔸部从前方来到接谷斗下方这段时间内,进入接谷斗内的禾杆由短变长;从接谷斗下方往后方离去这段时间里,则是由长变短;在这种变化过程中,接谷斗外面的禾杆与地面的夹角,开始是向后倾斜逐渐变化成垂直,再从垂直逐渐变化成往前倾斜;又从脱粒过程来看,禾杆开始进入接谷斗内时的长度,必须要把有谷粒的禾穗全部喂进接谷斗内,才能确保梳脱的谷粒不会不会掉在地里而浪费,又根据梳脱的谷粒往下落的自然规律和接谷斗内多层禾杆的运动过程是:正在脱粒的上层往接谷斗内走,脱净后的禾草往外拖,那么,下落的谷粒裏夹在往外拖的禾草中,被带出接谷斗内造成浪费。为了杜绝该浪费的发生,采取在接谷斗前沿的下方(也就是禾草刚往外拖时)把草割断,使禾草失去外拖的过程。为了把割断的禾草中裏夹的谷粒收回;又要确保移去禾草时不影响正常脱粒;还要最大限度减少移草用的动力;综合这三方面的因素,采用图7所示的输草链条70上的夹板83的行走路线规定在接谷斗前沿(也就是禾杆蔸部处于垂直时),把禾杆即不往接谷斗内走,也不往外拖时挂住,并按箭头方向,用等于机身行走速度或稍大于行走速度的线速度运动,把禾杆拖进压草弹条76内压住,使被割的禾杆完全背在输草链条上则,这时,禾杆蔸部被动刀组41割断,割断的禾杆随着压草链条横移过接谷斗整过前沿后,又被去后方的压草弹条压住,倒提着一边抖掉裹夹的谷粒,一边往后运动,快到图2所示三号甩草和支撑共用铤轮74时,被甩草叶片85快速拨着禾草的尾部翻转到输草链条的后方,掉进轧草机构内轧碎返田或收集另用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1