基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统
1.本发明涉及鱼群游泳行为分析和循环水养殖系统投喂量决策方法领域,尤其是涉及一种基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统。
背景技术:
2.循环水养殖是21世纪以来蓬勃发展的一类水产养殖模式,属于水资源利用率较高的集约化养殖模式,此类系统相对于传统水产养殖系统可节约90%
‑
99%的水资源,且可实现生产和环境因素可控,也被认为是未来渔业的必然发展趋势。在循环水养殖模式中投喂对养殖生产效益有着直接且至关重要的影响,然而投喂量的高效决策却一直以来都是亟待解决的生产管理难题。过于依赖人工经验的投喂决策给所投喂饲料的利用效率带来极大的不确定性,而饲料利用效率又进一步关系到了养殖鱼类生长效率、养殖水环境质量和生产成本等一系列问题。因此,循环水养殖过程中,投喂量的决策必须尽可能与养殖鱼类实时摄食需求靠拢。
3.现有预测鱼类摄食需求的技术方法主要分为残饵法和光流法,前者是通过识别水面的残饵数量的方法,这类方法一方面会使鱼类摄入过多饲料而引起相应的健康问题,另一方面所产生的残饵会造成饲料利用率下降和水质恶化;后者是通过识别鱼群活动所引起的水面反光变化的方法,该法的准确性受制于鱼群数量、体型大小、光照环境等因素,目前仅适用于与群体规模和体型较大的养殖鱼群。另外,上述技术都仅能通过一些外界信息间接反映养殖鱼群摄食需求,实际上这些外界信息还需要结合人工投喂经验才能进一步预测鱼群摄食需求,且与鱼群实时摄食需求还有一定差距。
技术实现要素:
4.本发明的目的在于提供了一种基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统,可依据鱼群游泳行为信息所预测的摄食需求完成投喂量的决策,为循环水养殖的智能化投喂作业提供良好的技术支持。
5.本发明采用的技术方案如下:
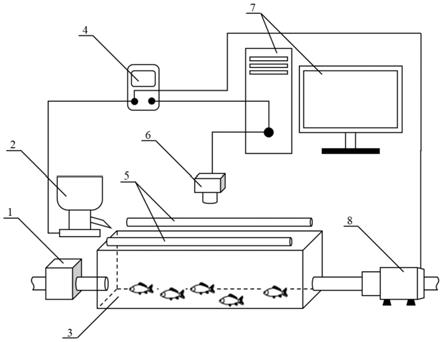
6.一种基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统,包括循环水处理系统1、投饲机2、循环水养殖池3、plc控制器4、led补光灯5、高清摄像机6、计算机7、变频水泵8;
7.所述循环水处理系统1和变频水泵8分别设于循环水养殖池3的两侧;所述led补光灯5设于循环水养殖池3上端;
8.所述高清摄像机6安装于循环水养殖池3的正上方,并与计算机7连接;
9.plc控制器4的输出端连接投饲机2与变频水泵8,其输入端连接计算机7;
10.所述智能投喂决策系统通过分析养殖对象游泳能耗情况进行循环水养殖中投喂决策,具体包括如下步骤:
11.投喂校正阶段:
12.1)在本系统的循环水养殖池内放入超过24h未摄食(即空腹状态)的养殖鱼群,并将群体规模n输入系统中,循环水养殖池正上方的高清摄像机实时传输图像信息至计算机;
13.2)计算机中的图像处理程序每间隔1s读取所存储的图像i
t
并利用深度学习算法实现对分析图像it中的养殖对象进行语义分割,并计算图像中连通域个数cn;若连通域个数cn等于群体规模n,则提取每个连通域的中心线,以水平方向为x轴、竖直方向为y轴建立坐标系,线性拟合中心线上以头部为起点的前20%的像素点,可得头部拟合直线斜率k
i
(i为鱼个体编号);若连通域个数cn不等于群体规模n,不做任何处理;
14.3)如果满足(即头部拟合直线与竖直方向夹角小于10
°
),计算当前鱼群中第i条鱼的中心线像素点数l
i
,并计算此时鱼群总体长(δ为当前单个像素与1mm的比值),获取至少10个总体长的数据后取平均值得到鱼群总体长同时计算机通过发送信号至plc来控制投饲机进行少量多次投喂,投喂间隔为5s,单次投喂量单位为g,其中a0为校正系数,数值越小,摄食量校正精度越高,建议取值为7.9~15.8。
15.4)从第一次投喂开始计算机程序通过读取实时图像每间隔1s识别并计算残饵,可得实时残饵数fn
t
(t为自投喂至此时所经过的时间,s),若满足(为单颗饵料重量,g),即20s内鱼群几乎没有进行摄食,则停止投喂,此时可得鱼群从空腹至饱食状态下所需摄食量f
s
:
[0016][0017]
5)计算所养殖鱼群的饱食系数s:
[0018][0019]
并将该值存储于计算机内以用于后续投喂量计算;最后将循环水养殖池中残饵捞出后进入日常投喂阶段。
[0020]
日常投喂阶段:
[0021]
1)根据不同养殖状况(如养殖目的、养殖阶段、养殖品种习性等)设置期望饱食程度t(%,即养殖鱼群所需要达到的饱食程度),循环水养殖池正上方的高清摄像机实时传输图像信息至计算机;
[0022]
2)计算机中的图像处理程序实时读取图像i
t
并利用深度学习算法实现对图像i
t
中的养殖对象进行语义分割,计算图像i
t
中连通域个数cn;
[0023]
3)若图像i
t
满足下述任一舍弃条件,则舍弃:a.若图像i
t
中连通域个数cn不等于群体规模n,则舍弃该图像;b.若图像i
t
中连通域个数cn等于群体规模n,则提取每个连通域的中心线,以水平方向为x轴、竖直方向为y轴建立坐标系,线性拟合中心线上以头部为起点的前20%的像素点,可得头部拟合直线方程y=k
i
x+b
i
(i为鱼个体编号),若不满足则舍弃该图像信息;
[0024]
若图像i
t
后1s内存在任一图像i
t+α
(α=1,2,...,fs,fs为摄像机图像采集频率)满足舍弃条件a或b,则舍弃时间t~t+fs所对应的所有图像;
[0025]
4)重复上述步骤2)和3),直到获取连续图像集合i
t+β
(β=0,1,...,fs),则可进行下一步计算。
[0026]
5)由连续图像集合i
t+β
(β=0,1,...,fs),可得图像i
t+β
的中心线集合,由此可获取第i条鱼的头部坐标(hx
i
,hy
i
)、尾部坐标(tx
i
,ty
i
)和鱼群总体长(l
iβ
为个体中心线像素点数,δ为当前单个像素与1mm的比值),进而可得尾部到头部拟合直线的距离d
iβ
:
[0027][0028]
d
iβ
的正负分别代表此时尾部摆动位于中心线左侧或右侧,此时当以时间t为横坐标、距离d
i
为纵坐标建立二维坐标,可得到第i条鱼的尾部摆动函数d
i
(β)=d
iβ
(β=0,1,...,fs);
[0029]
6)将尾部摆动函数d
i
(β)进行希尔伯特变换可得h[d
i
(β)],通过h[d
i
(β)]可进而求得此时连续图像集合i
t+β
(β=0,1,...,fs)内第i条鱼的平均尾部摆动幅值平均摆动频率
[0030][0031]
其中,为第i条鱼的尾部摆动相位;
[0032]
7)对鱼群中n条鱼的头部坐标(hx
i
,hy
i
)两两计算欧几里得距离,通过比较可得第i条鱼的最邻近个体的头部坐标(nndx
i
,nndy
i
),由此可得连续图像集合i
t+β
(β=0,1,...,fs)内第i条鱼与最邻近个体的平均相对水平距离
[0033][0034]
8)已知此时连续图像集合i
t+β
(β=0,1,...,fs)内第i条鱼的平均尾部摆动幅值平均摆动频率最邻近个体的平均相对水平距离循环水养殖池内流速u(u=v/a,其中v为流量计读数,a为循环水养殖池垂直流速方向的横截面积)、平均体长此时可得在这1s内鱼群游泳能耗状态值sec:
[0035][0036]
9)利用“饱食程度
‑
游泳能耗”模型,可计算出这1s内鱼群饱食程度ds:
[0037][0038]
若ds<t,计算机发送相应信号至plc来控制投饲机进行少量多次投喂,单次投喂量a和投喂间隔应与校正阶段一致,总投喂量(w
d
为日常投喂系数,以避免鱼群过度饱食,一般取0.85
‑
0.95);否则从步骤2)开始重复上述步骤;
[0039]
10)投喂结束,从步骤2)开始重复上述步骤。
[0040]
本发明的发明原理为:
[0041]
摄食行为和游泳行为都是鱼类最基础的行为模式,分别关系着鱼类的能量摄入和能量消耗,而这种能量的供求关系导致鱼类的饱食程度会一定程度上影响其游泳行为(如尾部摆动频率、尾部摆动幅度、鱼群内个体间相互距离等),进而影响游泳能耗效率;利用饱食程度与游泳行为相关参数的内在联系,根据游泳行为中的关键参数与游泳能耗的相关关系,定义“游泳能耗状态值sec”来表征鱼群的实时游泳能耗,用sigmoid函数结构拟合饱食程度和游泳能耗状态值sec,即可构建出“饱食程度
‑
游泳能耗”模型。
[0042]
本发明的一种基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统,充分利用养殖鱼类自身行为信息来反映鱼群实时饱食程度和摄食需求,摆脱人工经验和外界环境等因素所带来的不确定性,实现循环水养殖中投喂量的精准控制,在满足养殖鱼群生长所需的能量供给的同时,有效提高循环水养殖的生产效率。
[0043]
本发明的有益效果是;
[0044]
本发明的基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统,结构简单,方法精准有效,投喂量的决策是基于鱼群游泳行为信息来实时反馈鱼群饱食程度,充分利用养殖鱼类自身行为信息,重视养殖鱼类实时摄食需求,摆脱投喂量决策过程中对人工经验的过度依赖,符合水产养殖福利化的发展趋势,且在满足养殖鱼群生长所需的能量供给的同时,有效提高循环水养殖的生产效率。
附图说明
[0045]
图1是基于鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统结构图。
[0046]
图中:1
‑
循环水处理系统;2
‑
投饲机;3
‑
循环水养殖池;4
‑
plc控制器4;5
‑
led补光灯;6
‑
高清摄像机;7
‑
计算机;8
‑
变频水泵。
具体实施方式
[0047]
下面结合附图对本发明做进一步说明。
[0048]
参照图1,本发明的一种鱼群游泳能耗分析的循环水养殖鱼类智能投喂决策系统,
包括循环水处理系统1、投饲机2、循环水养殖池3、plc控制器4、led补光灯5、高清摄像机6、计算机7、变频水泵8;
[0049]
所述循环水处理系统1和变频水泵8分别设于循环水养殖池3的两侧;所述led补光灯5设于循环水养殖池3上端;
[0050]
所述高清摄像机6安装于循环水养殖池3的正上方,并与计算机7连接;
[0051]
plc控制器4的输出端连接投饲机2与变频水泵8,其输入端连接计算机7;
[0052]
所述智能投喂决策系统通过分析养殖对象游泳能耗情况进行循环水养殖中投喂决策,具体包括如下步骤:
[0053]
投喂校正阶段:
[0054]
1)在本系统的循环水养殖池内放入超过24h未摄食(即空腹状态)的养殖鱼群,并将群体规模n输入系统中,循环水养殖池正上方的高清摄像机实时传输图像信息至计算机;
[0055]
2)计算机中的图像处理程序每间隔1s读取所存储的图像i
t
并利用深度学习算法实现对分析图像i
t
中的养殖对象进行语义分割,并计算图像中连通域个数cn;若连通域个数cn等于群体规模n,则提取每个连通域的中心线,以水平方向为x轴、竖直方向为y轴建立坐标系,线性拟合中心线上以头部为起点的前20%的像素点,可得头部拟合直线斜率k
i
(i为鱼个体编号);若连通域个数cn不等于群体规模n,不做任何处理;
[0056]
3)如果满足(即头部拟合直线与竖直方向夹角小于10
°
),计算当前鱼群中第i条鱼的中心线像素点数l
i
,并计算此时鱼群总体长(δ为当前单个像素与1mm的比值),获取10个总体长的数据后取平均值得到鱼群总体长同时计算机通过发送信号至plc来控制投饲机进行少量多次投喂,投喂间隔为5s,单次投喂量单位为g,其中a0为校正系数,数值越小,摄食量校正精度越高,建议取值为7.9~15.8。
[0057]
4)从第一次投喂开始计算机程序通过读取实时图像每间隔1s识别并计算残饵,可得实时残饵数fn
t
(t为自投喂至此时所经过的时间,s),若满足(为单颗饵料重量,g),即20s内鱼群几乎没有进行摄食,则停止投喂,此时可得鱼群从空腹至饱食状态下所需摄食量f
s
:
[0058][0059]
5)计算所养殖鱼群的饱食系数s:
[0060][0061]
并将该值存储于计算机内以用于后续投喂量计算;最后将循环水养殖池中残饵捞出后进入日常投喂阶段。
[0062]
日常投喂阶段:
[0063]
1)根据不同养殖状况(如养殖目的、养殖阶段、养殖品种习性等)设置期望饱食程度t(%,即养殖鱼群所需要达到的饱食程度),循环水养殖池正上方的高清摄像机实时传输图像信息至计算机;
[0064]
2)计算机中的图像处理程序实时读取图像i
t
并利用深度学习算法实现对图像i
t
中的养殖对象进行语义分割,计算图像i
t
中连通域个数cn;
[0065]
3)若图像i
t
满足下述任一舍弃条件,则舍弃:a.若图像i
t
中连通域个数cn不等于群体规模n,则舍弃该图像;b.若图像i
t
中连通域个数cn等于群体规模n,则提取每个连通域的中心线,以水平方向为x轴、竖直方向为y轴建立坐标系,线性拟合中心线上以头部为起点的前20%的像素点,可得头部拟合直线方程y=k
i
x+b
i
(i为鱼个体编号),若不满足则舍弃该图像信息;
[0066]
若图像i
t
后1s内存在任一图像i
t+α
(α=1,2,..,,fs,fs为摄像机图像采集频率)满足舍弃条件a或b,则舍弃时间t~t+fs所对应的所有图像;
[0067]
4)重复上述步骤2)和3),直到获取连续图像集合i
t+β
(β=0,1,...,fs),则可进行下一步计算。
[0068]
5)由连续图像集合i
t+β
(β=0,1,...,fs),可得图像i
t+β
的中心线集合,由此可获取第i条鱼的头部坐标(hx
i
,hy
i
)、尾部坐标(tx
i
,ty
i
)和鱼群总体长(l
iβ
为个体中心线像素点数,δ为当前单个像素与1mm的比值),进而可得尾部到头部拟合直线的距离d
iβ
:
[0069][0070]
d
iβ
的正负分别代表此时尾部摆动位于中心线左侧或右侧,此时当以时间t为横坐标、距离d
i
为纵坐标建立二维坐标,可得到第i条鱼的尾部摆动函数d
i
(β)=d
iβ
(β=0,1,...,fs);
[0071]
6)将尾部摆动函数d
i
(β)进行希尔伯特变换可得h[d
i
(β)],通过h[d
i
(β)]可进而求得此时连续图像集合i
t+β
(β=0,1,...,fs)内第i条鱼的平均尾部摆动幅值平均摆动频率
[0072][0073]
其中,为第i条鱼的尾部摆动相位;
[0074]
7)对鱼群中n条鱼的头部坐标(hx
i
,hy
i
)两两计算欧几里得距离,通过比较可得第i条鱼的最邻近个体的头部坐标(nndx
i
,nndy
i
),由此可得连续图像集合i
t+β
(β=0,1,...,fs)内第i条鱼与最邻近个体的平均相对水平距离
[0075][0076]
8)已知此时连续图像集合i
t+β
(β=0,1,...,fs)内第i条鱼的平均尾部摆动幅值平均摆动频率最邻近个体的平均相对水平距离循环水养殖池内流速u(u=v/a,其中v为流量计读数,a为循环水养殖池垂直流速方向的横截面积)、平均体长此时可得在这1s内鱼群游泳能耗状态值sec:
[0077][0078]
9)利用“饱食程度
‑
游泳能耗”模型,可计算出这1s内鱼群饱食程度ds:
[0079][0080]
若ds<t,计算机发送相应信号至plc来控制投饲机进行少量多次投喂,单次投喂量a和投喂间隔应与校正阶段一致,总投喂量(w
d
为日常投喂系数,以避免鱼群过度饱食,一般取0.85
‑
0.95);否则从步骤2)开始重复上述步骤;
[0081]
10)投喂结束,从步骤2)开始重复上述步骤。
[0082]
以上公开的仅为本发明的具体实施例,但本发明并非局限于此,对于本领域的普通技术人员来说,在不脱离本发明的前提下,做出的变形应视为属于本发明保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1