水稻工厂化育秧盘分盘机及其分盘方法
1.本发明属于农业机械技术领域,具体涉及一种水稻工厂化育秧盘分盘机及其分盘方法。
背景技术:
2.我国的水稻种植业发达,但是水稻种植机械化还是相对发达国家比较落后,种植是水稻生产过程中机械化最薄弱的环节,水稻机械化播种育秧技术是水稻种植机械化的核心。育秧盘是育秧的载体,在工厂化育秧时需要一个处理育秧盘的流水线,实现育秧盘的供送、铺底土、压实、播种、盖表土、洒水、叠盘等关键工序。目前,有通过机械手加吸盘组合将托盘逐个摆放到对应工位上,这种方式虽然实现了自动化操作,但是存在能耗高、振动噪音大、结构复杂、制造成本高的缺点。因此,为了提高水稻育秧播种流水线作业效率,需要研发一套结构简单、成本低且能自动高速分离堆叠育秧盘的装置,以促进工厂化育秧流水线的推广使用。
技术实现要素:
3.本发明的目的是针对现有技术的不足,提供一种水稻工厂化育秧盘分盘机及其分盘方法,利用简单的机构、简便的方式来实现育秧盘的分离。
4.本发明水稻工厂化育秧盘分盘机,包括分盘机构、秧盘架、滑块一、滑块二、连杆一、齿轮一、连杆二、齿轮二和电机;所述的分盘机构包括上导轨、下导轨、夹具板一、夹具板二、夹具板三、夹具板四、交错连接板一、交错连接板二和支撑架;两根上导轨固定在机架两侧;两根下导轨固定在机架两侧,且每根下导轨位于一根上导轨正下方;夹具板一的两端与两根上导轨分别构成滑动副,夹具板二的两端与两根上导轨分别构成滑动副,夹具板三的两端与两根下导轨分别构成滑动副,夹具板四的两端与两根下导轨分别构成滑动副,且夹具板一和夹具板二位于上导轨的不同端位置,夹具板三和夹具板四位于下导轨的不同端位置;所述的夹具板一、夹具板二、夹具板三和夹具板四上均固定有间距设置的两个支撑架;夹具板一与夹具板三通过交错连接板一固定连接,夹具板二与夹具板四通过交错连接板二固定连接;交错连接板一与交错连接板二间距设置,且交错连接板一与滑块一固定,交错连接板二与滑块二固定;所述的秧盘架置于两根下导轨之间,并与机架固定。所述的滑块一和滑块二与机架开设的两个滑道分别构成滑动副;连杆一的一端与滑块一铰接,另一端与齿轮一偏心铰接;连杆二的一端与滑块二铰接,另一端与齿轮二偏心铰接;齿轮一由电机提供动力;齿轮二铰接在机架上,并与齿轮一啮合;滑块一的铰接轴线与齿轮一的中心轴线等高,滑块二的铰接轴线与齿轮二的中心轴线等高;滑块二位于滑块一正下方状态下,连杆一与连杆二平行。
5.优选地,所述的秧盘架包括角钢和连接件;四根角钢呈方形排布;角钢竖直设置,且底部固定在机架上;相邻两根角钢的顶部通过一个连接件固定连接,底部也通过一个连接件固定连接。
6.优选地,所述的支撑架包括支撑滑轨、支撑块和定位块;所述的支撑滑轨固定在夹具板一、夹具板二、夹具板三或夹具板四上;所述的支撑块与支撑滑轨的t形槽构成滑动副;两个定位块分别位于支撑块上部和下部,且均与支撑滑轨的t形槽构成滑动副;定位块设有一体成型的伸出杆,伸出杆上的外螺纹与螺母连接;两个定位块夹紧支撑块。
7.优选地,所述的齿轮一固定在输入轴上,电机与输入轴通过减速器连接。
8.优选地,所述的秧盘架底部设有带传动机构。
9.该水稻工厂化育秧盘分盘机的分盘方法,具体如下:
10.步骤一、电机复位,使得夹具板一和夹具板二处于间距最大位置,夹具板三和夹具板四处于间距最小位置;然后,将堆叠的秧盘置于秧盘架上,并由夹具板三和夹具板四上的支撑架支撑;最后,启动电机,电机驱动齿轮一;齿轮一经连杆一带动滑块一滑动,并与齿轮二啮合;齿轮二经连杆二带动滑块二滑动;滑块一经交错连接板一带动夹具板二和夹具板三,滑块二经交错连接板二带动夹具板一和夹具板四。
11.步骤二、交错连接板一和交错连接板二相向滑动,从而夹具板一和夹具板二相向滑动,夹具板三和夹具板四反向滑动,直到夹具板一和夹具板二处于间距最小位置,且夹具板三和夹具板四处于间距最大位置时,夹具板一和夹具板二上的支撑架支撑住除最底部秧盘以外的其余秧盘,而最底部秧盘在重力作用下掉落到秧盘架底部的带传动机构上,带传动机构输出秧盘。
12.步骤三、交错连接板一和交错连接板二反向滑动,从而夹具板一和夹具板二反向滑动,夹具板三和夹具板四相向滑动,直到夹具板一和夹具板二处于间距最大位置,且夹具板三和夹具板四处于间距最小位置时,堆叠的秧盘在重力作用下掉落至夹具板三和夹具板四上的支撑架上,夹具板三和夹具板四上的支撑架支撑住除最底部秧盘。
13.优选地,还包括步骤四:重复步骤二和步骤三,直到堆叠的秧盘全部分离,并被带传动机构输出。
14.优选地,执行步骤一前还有如下步骤:同步调节夹具板一和夹具板二上各支撑架的支撑块高度,以适应不同尺寸秧盘堆叠后上下相邻秧盘间的间距,调节过程如下:拧松两个定位块的伸出杆上的螺母,将支撑块以及两个定位块沿支撑滑轨滑动,调节好支撑块以及两个定位块的高度后,拧紧两个定位块的伸出杆上的螺母,使两个定位块固定在支撑滑轨上,从而使得两个定位块夹紧支撑块。
15.本发明具有的有益效果如下:
16.1、本发明利用两套曲柄滑块机构实现分盘机构的往复运动,且两套曲柄滑块机构之间具有相位差,实现了夹具板一与夹具板二相向运动时夹具板三与夹具板四背向运动,且夹具板一与夹具板二背向运动时夹具板三与夹具板四相向运动,从而实现分盘动作。
17.2、本发明的两套曲柄滑块机构利用一对直齿圆柱齿轮传动,一对直齿圆柱齿轮转速大小相等,方向相反,整个机构只需要一个动力源(驱动其中一个齿轮);一对齿轮作为曲柄,实现上下两套曲柄滑块机构的两滑块移动速度大小相等,方向相反,往复运动;且曲柄滑块对心安装,避免产生急回运动,使滑块一、滑块二等速滑移,并且回程距离和出程距离相等,滑块二位于滑块一正下方状态下,连杆一与连杆二平行。
18.3、本发明水稻工厂化育秧盘分盘机整体结构简单,成本低,便于投入工厂实际应用。
19.4、本发明中支撑架的支撑块可以调节高度位置,以适应不同尺寸秧盘堆叠后上下相邻秧盘间的间距。
附图说明
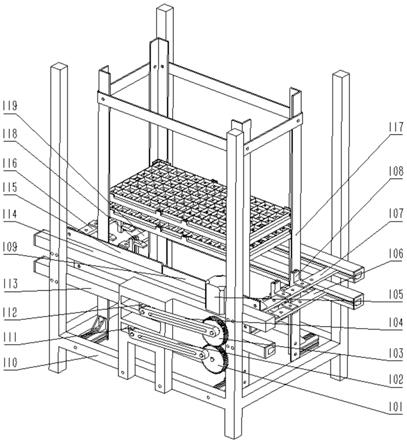
20.图1为本发明的整体结构立体图;
21.图2为本发明中分盘机构的结构立体图;
22.图3为本发明中分盘机构与滑块一、滑块二、连杆一、齿轮一、连杆二和齿轮二的装配立体图;
23.图4为本发明中交错连接板一的结构立体图;
24.图5为本发明中交错连接板二的结构立体图;
25.图6为本发明中夹具板一与夹具板二的间距大于夹具板三与夹具板四间距时交错连接板一和交错连接板二的相对位置示意图;
26.图7为本发明中夹具板一与夹具板二的间距小于夹具板三与夹具板四间距时交错连接板一和交错连接板二的相对位置示意图;
27.图8为本发明中夹具板一与夹具板二的间距等于夹具板三与夹具板四间距时交错连接板一和交错连接板二的相对位置示意图;
28.图9为本发明中支撑架的结构立体图。
具体实施方式
29.下面结合附图对本发明作进一步说明。
30.如图1、2、3、4和5所示,水稻工厂化育秧盘分盘机,包括分盘机构、秧盘架117、滑块一112、滑块二111、连杆一104、齿轮一103、连杆二102、齿轮二101和电机105;分盘机构包括上导轨114、下导轨、夹具板一116、夹具板二107、夹具板三119、夹具板四106、交错连接板一115、交错连接板二109和支撑架108;两根上导轨114固定在机架110两侧;两根下导轨113固定在机架两侧,且每根下导轨位于一根上导轨正下方;夹具板一116的两端与两根上导轨分别构成滑动副,夹具板二107的两端与两根上导轨分别构成滑动副,夹具板三119的两端与两根下导轨分别构成滑动副,夹具板四106的两端与两根下导轨分别构成滑动副,且夹具板一116和夹具板二107位于上导轨的不同端位置,夹具板三119和夹具板四106位于下导轨的不同端位置;夹具板一、夹具板二、夹具板三和夹具板四上均固定有间距设置的两个支撑架108;夹具板一与夹具板三通过交错连接板一115固定连接,夹具板二与夹具板四通过交错连接板二109固定连接;交错连接板一与交错连接板二间距设置,且交错连接板一与滑块一112固定,交错连接板二与滑块二111固定;秧盘架117置于两根下导轨之间,并与机架固定。如图1所示,滑块一和滑块二与机架开设的两个滑道分别构成滑动副;连杆一104的一端与滑块一铰接,另一端与齿轮一103偏心铰接;连杆二102的一端与滑块二111铰接,另一端与齿轮二101偏心铰接;齿轮一由电机105提供动力;齿轮二铰接在机架上,并与齿轮一啮合;滑块一的铰接轴线与齿轮一的中心轴线等高,滑块二的铰接轴线与齿轮二的中心轴线等高,相当于曲柄滑块对心安装,避免产生急回运动,这样可以使滑块一、滑块二等速滑移,并且回程距离和出程距离相等;滑块二位于滑块一正下方状态下,连杆一与连杆二平行。
31.作为一个优选实施例,秧盘架包括角钢和连接件;四根角钢呈方形排布;角钢竖直
设置,且底部固定在机架上;相邻两根角钢的顶部通过一个连接件固定连接,底部也通过一个连接件固定连接;四根角钢对秧盘起到导向作用,保证秧盘在水平方向上不发生位置偏移。
32.作为一个优选实施例,如图9所示,支撑架包括支撑滑轨、支撑块118和定位块;支撑滑轨固定在夹具板一、夹具板二、夹具板三或夹具板四上;支撑块与支撑滑轨的t形槽构成滑动副;两个定位块分别位于支撑块上部和下部,且均与支撑滑轨的t形槽构成滑动副;定位块设有一体成型的伸出杆,伸出杆上的外螺纹与螺母连接;两个定位块用于对支撑块进行夹紧定位。
33.作为一个优选实施例,齿轮一固定在输入轴上,电机与输入轴通过减速器连接。
34.作为一个优选实施例,秧盘架117底部设有带传动机构;其中,带传动机构包括传送带、主动带轮、从动带轮和驱动件;驱动件驱动主动带轮,从动带轮与主动带轮通过传送带连接;传送带穿过机架;驱动件可以选用电机。
35.该水稻工厂化育秧盘分盘机的分盘方法,具体如下:
36.步骤一、电机(由控制器控制)复位,使得夹具板一116和夹具板二107处于间距最大位置,夹具板三119和夹具板四106处于间距最小位置,如图6所示;然后,将堆叠的秧盘置于秧盘架上,并由夹具板三119和夹具板四106上的支撑架108支撑;最后,启动电机105,电机105驱动齿轮一103;齿轮一103经连杆一104带动滑块一112滑动,并与齿轮二101啮合;齿轮二101经连杆二102带动滑块二111滑动;滑块一112经交错连接板一带动夹具板二107和夹具板三119,滑块二111经交错连接板二带动夹具板一116和夹具板四106。
37.步骤二、交错连接板一和交错连接板二109相向滑动,从而夹具板一116和夹具板二107相向滑动,夹具板三119和夹具板四106反向滑动,当交错连接板一和交错连接板二109相向滑动至行程的一半时,如图8所示,夹具板一116和夹具板二107上的支撑架108与夹具板三119和夹具板四106上的支撑架108对堆叠的秧盘处于交接状态,具体为:夹具板一116和夹具板二107上的支撑架108即将支撑除最底部秧盘以外的其余秧盘,夹具板三119和夹具板四106上的支撑架108即将释放最底部秧盘;夹具板一116和夹具板二107继续相向滑动,夹具板三119和夹具板四106继续反向滑动,直到夹具板一116和夹具板二107处于间距最小位置,且夹具板三119和夹具板四106处于间距最大位置时,如图7所示,夹具板一116和夹具板二107上的支撑架108支撑住除最底部秧盘以外的其余秧盘,而最底部秧盘在重力作用下掉落到秧盘架117底部的带传动机构上,带传动机构输出秧盘。
38.步骤三、交错连接板一和交错连接板二109反向滑动,从而夹具板一116和夹具板二107反向滑动,夹具板三119和夹具板四106相向滑动,当交错连接板一和交错连接板二109反向滑动至行程的一半时,夹具板一116和夹具板二107上的支撑架108与夹具板三119和夹具板四106上的支撑架108对堆叠的秧盘处于交接状态,具体为:夹具板一116和夹具板二107上的支撑架108即将释放堆叠的秧盘,夹具板三119和夹具板四106上的支撑架108即将支撑堆叠的秧盘;夹具板一116和夹具板二107继续反向滑动,夹具板三119和夹具板四106继续相向滑动,直到夹具板一116和夹具板二107处于间距最大位置,且夹具板三119和夹具板四106处于间距最小位置时,堆叠的秧盘在重力作用下掉落至夹具板三119和夹具板四106上的支撑架108上,夹具板三119和夹具板四106上的支撑架108支撑住除最底部秧盘。
39.作为一个优选实施例,还包括步骤四:重复步骤二和步骤三,直到堆叠的秧盘全部
分离,并被带传动机构输出。
40.作为一个优选实施例,执行步骤一前还有如下步骤:同步调节夹具板一116和夹具板二107上各支撑架108的支撑块高度,调节过程如下:拧松两个定位块的伸出杆上的螺母,将支撑块以及两个定位块沿支撑滑轨滑动,调节好支撑块以及两个定位块的高度后,拧紧两个定位块的伸出杆上的螺母,使两个定位块固定在支撑滑轨上,从而使得两个定位块夹紧支撑块,以适应不同尺寸秧盘堆叠后上下相邻秧盘间的间距。
41.以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1