一种基于互联网的大棚无人种植系统及其控制方法与流程
1.本发明涉及智能种植技术领域,具体涉及一种基于互联网的大棚无人种植系统及其控制方法。
背景技术:
2.温室大棚是一种具有出色的保温性能的框架覆膜结构,它出现使得人们可以吃到反季节蔬菜。一般大棚使用竹结构或者钢结构的骨架,上面覆上保温塑料膜,这样就形成了一个温室空间。外膜很好地阻止内部蔬菜生长所产生的二氧化碳的流失,使棚内具有良好的保温效果。目前,在使用温室大棚种植农作物时,需要人工到大棚内进行浇灌和施肥,使农作物顺利生长。由于大棚位置一般远离居民区,因此工作者往往从居住点往返大棚要花费较长时间,种植不方便,效率低下。
技术实现要素:
3.本发明的目的是针对现有技术的不足而提供一种基于互联网的大棚无人种植系统及其控制方法,能够实现远程控制种植农作物,节省人力,有利于提高种植效率。
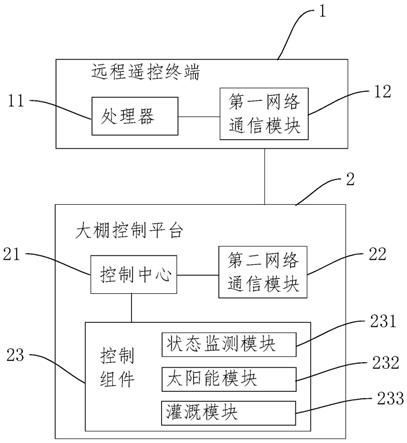
4.为了完成上述目的,本发明提出了一种基于互联网的大棚无人种植系统,包括:远程遥控终端和大棚控制平台;所述远程遥控终端包括相互连接的处理器和第一网络通讯模块;所述大棚控制平台包括控制中心以及分别和所述控制中心连接的第二网络通讯模块和控制组件,所述控制中心和所述处理器通过所述第一网络通讯模块和所述第二网络通讯模块实现通讯连接;所述控制组件包括状态监测模块、太阳能模块和灌溉模块,所述状态监测模块和所述控制中心电连接,用于采集大棚作物的生长数据;所述太阳能模块包括设置在大棚顶部的安装支架板,所述安装支架板上铺设有太阳能电池板,所述太阳能电池板和所述控制中心电连接,相邻所述太阳能电池板之间设有导流槽,所述安装支架板的底部连接有汇流板,所述汇流板上设有和所述导流槽连接的汇流槽;所述灌溉模块包括蓄水箱、集水管、肥料配置箱、出水管以及灌溉水管,所述集水管的一端和所述汇流槽的底部连通,另一端和所述蓄水箱连通,所述肥料配置箱包括混合腔室及肥料腔室,所述肥料腔室的底部设有重量传感器,所述混合腔室和所述蓄水箱通过第一管道连通,所述第一管道上设有第一电磁阀,所述肥料腔室和所述混合腔室之间设有进料口,所述进料口内设有进料器,所述进料器包括旋转轴和设置在所述旋转轴上的若干进料片,所述旋转轴和进料电机连接,所述进料片和所述旋转轴的中轴线平行,所述混合腔室通过所述出水管和所述灌溉水管连通,所述出水管上设有第二电磁阀,所述控制中心分别和所述重量传感器、所述进料电机、所述第一电磁阀和所述第二电磁阀电连接。
5.可选地,所述安装支架板包括第一安装支架板和第二安装支架板,所述第一安装支架板和所述第二安装支架板分别和大棚左右侧壁的顶部铰接。
6.可选地,还包括动力机构和传动机构,所述传动机构包括传动杆、第一转盘、第二转盘、第一连杆和第二连杆,所述第一转盘和所述第二转盘分别设置在所述传动杆的两端,
所述第一连杆的一端和所述第一安装支架板铰接,另一端和所述第一转盘的偏心端铰接,所述第二连杆的一端和所述第二安装支架板铰接,另一端和所述第二转盘的偏心端铰接,且当所述第一安装支架板和第二安装支架板闭合时,所述第一连杆和所述第二连杆左右对称,所述动力机构用于驱动所述传动杆转动。
7.可选地,所述动力机构包括驱动电机、第一齿轮和第二齿轮,所述驱动电机的输出轴和所述第一齿轮连接,所述第二齿轮同轴设置在所述传动杆的中部,所述第一齿轮和所述第二齿轮啮合。
8.可选地,所述混合腔室内设有搅拌电机,所述搅拌电机设有搅拌叶片。
9.可选地,所述状态监测模块包括分别和所述控制中心连接的光照传感器、温度传感器、土壤湿度传感器和二氧化碳传感器以及摄像头。
10.本技术还提出了一种基于互联网的大棚无人种植系统的控制方法,应用于上述的系统,包括以下步骤:控制中心接收状态监测模块采集的大棚农作物生长数据和重量传感器采集的肥料剩余信息;所述控制中心通过网络将所述大棚作物的生长数据和所述肥料腔室的肥料剩余信息发送至远程遥控终端;所述控制中心接收所述远程遥控终端发送的控制指令,根据所述控制指令控制进料电机、第一电磁阀以及第二电磁阀的运行状态;其中,所述控制指令包括浇水指令和施肥指令,所述浇水指令携带控制所述第一电磁阀和所述第二电磁阀的运行参数信息,所述施肥指令携带控制所述进料电机、所述第一电磁阀以及所述第二电磁阀的运行参数信息。
11.可选地,还包括以下步骤:所述控制中心接收所述远程遥控终端发送的搅拌指令,所述控制中心根据所述搅拌指令控制搅拌电机运行搅拌肥料。
12.可选地,所述大棚农作物生长数据包括光照数据、温度数据、土壤湿度数据二氧化碳浓度数据以及农作物生长图像数据。
13.可选地,所述远程遥控终端内部储存农作物不同生长期的图片,对比接收到的农作物生长图像数据与储存的图片判断农作物的生长期,然后根据农作物的生长期所需的光照强度生成光照控制指令,所述光照控制指令携带驱动电机的转动角度,所述转动角度与农作物的生长期所需的光照强度成正相关;所述控制中心接收所述远程遥控终端发送的光照控制指令并控制所述驱动电机转动。
14.与现有技术相比,本发明的有益效果是:1、本技术通过第一网络模块和第二网络模块实现远程遥控终端和大棚控制平台的信息交互,大棚管理者不需要往返大棚就能远程实现对农作物的浇灌和施肥,节省人力,提高种植效率;2、本技术通过太阳能模块收集电能为控制中心和其他设备供电,并且太阳能模块还能收集大棚顶部的雨水,在安装支架板上进行改进,不需要增加额外的机械结构就能实现雨水资源可回收利用;3、在进料口设置了进料器和重量传感器,通过控制进料电机转动就可以调节肥料进料速度,结构简单、使用方便,并且通过重量传感器可以实时了解肥料的储存状态以便及时补充。
附图说明
15.图1为本发明实施例中基于互联网的大棚无人种植系统的模块框图;图2为图1中灌溉模块的结构示意图;图3为图2中进料器的结构示意图;图4为本发明实施例中大棚的结构示意图;图5为图4的俯视图;图6为本发明实施例中动力机构和传动机构的结构示意图;图7为图6的左视图;图8为图6的右视图;图9为本发明实施例中控制方法的流程图。
16.其中,附图标记为:1、远程遥控终端;11、处理器;12、第一网络通讯模块;2、大棚控制平台;21、控制中心;22、第二网络通信模块;23、控制组件;231、状态检测模块;232、太阳能模块;233、灌溉模块;2331、蓄水箱;2332、集水管;2333、肥料配置箱;2334、混合腔室;2335、肥料腔室;2336、进料器;2337、进料电机;2338、出水管;2339、灌溉水管;23310、第一管道;23311第一电磁阀;23312第二电磁阀;23361、旋转轴;23362、进料片;2321、安装支架板;2322、汇流板;2323、太阳能电池板;2324、导流槽;2325、汇流槽;2326、传动杆;2327、第一转盘;2328、第二转盘;2329、第一连杆;23210、第二连杆;23211、第二齿轮;23212、驱动电机;23213、第一齿轮。
具体实施方式
17.为了使本技术领域的人员更好地理解本技术方案,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
18.在本技术实施例的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术实施例和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术实施例的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.在本技术实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术实施例中的具体含义。
20.为了便于理解,请参阅图1至图8,本发明提出了一种基于互联网的大棚无人种植系统,包括:远程遥控终端1和大棚控制平台2;所述远程遥控终端1包括相互连接的处理器11和第一网络通讯模块12,具体的,远程遥控终端1可以采用手机、平板电脑、智能手表、台式电脑等终端设备;所述大棚控制平台2包括控制中心21以及分别和所述控制中心21连接
的第二网络通讯模块22和控制组件23,所述控制中心21和所述处理器11通过所述第一网络通讯模块12和所述第二网络通讯模块22实现通讯连接,第一网络通讯模块12和所述第二网络通讯模块22可以采用3g、4g或5g网络通讯模块;所述控制组件23包括状态监测模块231、太阳能模块232和灌溉模块233,所述状态监测模块231和所述控制中心21电连接,用于采集大棚作物的生长数据;所述太阳能模块232包括设置在大棚顶部的安装支架板2321,所述安装支架板2321上铺设有太阳能电池板2323,所述太阳能电池板2323和所述控制中心21电连接,相邻所述太阳能电池板2323之间的安装支架板2321上设有导流槽2324,所述安装支架板2321的底部连接有汇流板2322,所述汇流板2322上设有和所述导流槽2324连接的汇流槽2325;所述灌溉模块233包括蓄水箱2331、集水管2332、肥料配置箱2333、出水管2338以及灌溉水管2339,灌溉水管2339可以采用滴管管组、喷淋头等,所述集水管2332的一端和所述汇流槽2325的底部连通,另一端和所述蓄水箱2331连通,所述肥料配置箱2333包括混合腔室2334及肥料腔室2335,所述肥料腔室2335的底部设有重量传感器,重量传感器用于检测肥料的剩余量,所述混合腔室2334和所述蓄水箱2331通过第一管道23310连通,所述第一管道23310上设有第一电磁阀23311,所述肥料腔室2335和所述混合腔室2334之间设有进料口,所述进料口内设有进料器2336,肥料通过进料器2336进料,所述进料器2336包括旋转轴23361和设置在所述旋转轴23361上的若干进料片23362,所述旋转轴23361和进料电机2337连接,所述进料片23362和所述旋转轴23361的中轴线平行,进料片23362的数量不做限制,可以为3片、4片或5片等。以进料片23362数量为4片为例,每当进料电机2337旋转十分之一周时,进料的体积为相邻两个进料片23362之间围成的空间,通过控制进料电机2337的旋转速度和角度就能控制进料的多少,便于控制肥料进料,选择合适的分量。所述混合腔室2334通过所述出水管2338和所述灌溉水管2339连通,所述出水管2338上设有第二电磁阀23312,所述控制中心21分别和所述重量传感器、所述进料电机2337、所述第一电磁阀23311和所述第二电磁阀23312电连接。当需要浇水时,远程遥控终端1和大棚控制平台2进行网络信息通讯,通过网络发送控制指令,控制第一电磁阀23311和所述第二电磁阀23312打开,蓄水箱2331中的水就可以进入灌溉水管2339,通过灌溉水管2339进行浇灌;当需要施肥时,控制第一电磁阀23311打开,然后控制进料电机2337旋转进料,当重量传感器的变化量到达设定值后停止进料,然后打开第二电磁阀23312进行施肥。
21.本技术实施例的一种基于互联网的大棚无人种植系统,通过第一网络模块和第二网络模块实现远程遥控终端1和大棚控制平台2的信息交互,大棚管理者不需要往返大棚就能远程实现对农作物的浇灌和施肥。
22.太阳能模块232上的太阳能电池板2323可以收集电能为控制中心21和其他设备供电。相邻所述太阳能电池板2323之间设有导流槽2324,所述安装支架板2321的底部连接有汇流板2322,所述汇流板2322上设有和所述导流槽2324连接的汇流槽2325。当下雨时,雨水从导流槽2324流到汇流槽2325,然后经过集水管2332进入到蓄水箱2331,在安装支架板2321上进行改进,使安装支架板2321既能起到安装太阳能电池板2323又能起到收集雨水的作用,不需要增加额外的机械结构就能实现雨水资源可回收利用,结构简单,使用方便。
23.在进料口设置了进料器2336和重量传感器,通过控制进料电机2337转动就可以调节肥料进料速度,结构简单、使用方便,并且通过重量传感器可以实时了解肥料的储存状态以便及时补充。
24.作为对上述实施例的进一步改进,参照图4至图8,所述安装支架板2321包括第一安装支架板和第二安装支架板,所述第一安装支架板和所述第二安装支架板分别和大棚左右侧壁的顶部铰接。太阳能模块232还包括动力机构和传动机构,所述传动机构包括传动杆2326、第一转盘2327、第二转盘2328、第一连杆2329和第二连杆23210,所述第一转盘2327和所述第二转盘2328分别设置在所述传动杆2326的两端,所述第一连杆2329的一端和所述第一安装支架板铰接,另一端和所述第一转盘2327的偏心端铰接,所述第二连杆23210的一端和所述第二安装支架板铰接,另一端和所述第二转盘2328的偏心端铰接。例如,参照图4,当所述第一安装支架板和第二安装支架板闭合时,所述第一连杆2329和所述第二连杆23210左右对称,且第一连杆2329和第一转盘2327铰接的一端较转盘圆心偏右下,第二连杆23210和第二转盘2328铰接的一端较转盘圆心偏左下。所述动力机构用于驱动所述传动杆2326转动,当传动杆2326转动时,第一连杆2329和第二连杆23210会慢慢撑开第一安装支架板和第二安装支架板,使太阳光照进大棚。本实施例的太阳能模块232,当检测到光照不足时可以打开第一安装支架板和第二安装支架板使光线照射到大棚,避免作物缺少生长所需的光照,利于作物生长。
25.进一步,在一个实施例中,所述动力机构包括驱动电机23212、第一齿轮23213和第二齿轮23211,所述驱动电机23212的输出轴和所述第一齿轮23213连接,所述第二齿轮23211同轴设置在所述传动杆2326的中部,所述第一齿轮23213和所述第二齿轮23211啮合。当驱动电机23212转动时,驱动第一齿轮23213和第二齿轮23211转动,从而带动传动杆2326转动。
26.进一步,在本技术的一个实施例中,所述混合腔室2334内设有搅拌电机,所述搅拌电机设有搅拌叶片。在控制进料电机2337旋转进料时,同时控制搅拌电机进行搅拌,使肥料快速溶解。
27.进一步,在本技术的实施例中,所述状态监测模块231包括分别和所述控制中心21连接的光照传感器、温度传感器、土壤湿度传感器和二氧化碳传感器以及摄像头,分别用于采集大棚的光照数据、温度数据、土壤湿度数据二氧化碳浓度数据以及农作物生长图像数据,采集到的数据通过网络传输到远程遥控终端1,便于工作人员了解大棚作物生长环境数据。
28.另一方面,本技术实施例还提出了一种基于互联网的大棚无人种植系统的控制方法,应用于上述的系统。参见图9,本技术的一种基于互联网的大棚无人种植系统的控制方法包括以下步骤:s100、控制中心21接收状态监测模块231采集的大棚农作物生长数据和重量传感器采集的肥料剩余信息;s200、所述控制中心21通过网络将所述大棚作物的生长数据和所述肥料腔室2335的肥料剩余信息发送至远程遥控终端1;s300、所述控制中心21接收所述远程遥控终端1发送的控制指令,根据所述控制指令控制进料电机2337、第一电磁阀23311以及第二电磁阀23312的运行状态。其中,所述控制指令包括浇水指令和施肥指令,所述浇水指令携带控制所述第一电磁阀23311和所述第二电磁阀23312的运行参数信息,所述施肥指令携带控制所述进料电机2337、所述第一电磁阀23311以及所述第二电磁阀23312的运行参数信息,参数信息可以为:进料电机2337的转速、进料电机2337的停止条件为重量传感器检测的数据达到预设值、第一电磁阀23311开启时间、第二电磁阀23312开启时间等。
29.本技术实施例的一种基于互联网的大棚无人种植系统的控制方法通过网络实现
远程遥控终端1和大棚控制平台2的信息交互,大棚管理者不需要往返大棚就能远程实现对农作物的浇灌和施肥;通过浇水指令和施肥指令控制控制进料电机2337、第一电磁阀23311以及第二电磁阀23312的运行状态,实现远程控制施肥和浇水作业,当重量传感器检测的数据达到预设值时停止进料,实现对肥料的精准投放。
30.进一步,本技术实施例的一种基于互联网的大棚无人种植系统的控制方法还包括以下步骤:所述控制中心21接收所述远程遥控终端1发送的搅拌指令,所述控制中心21根据所述搅拌指令控制搅拌电机运行搅拌肥料。在控制进料电机2337旋转进料时,同时控制搅拌电机进行搅拌,使肥料快速溶解。
31.进一步,所述大棚农作物生长数据包括光照数据、温度数据、土壤湿度数据二氧化碳浓度数据以及农作物生长图像数据。从多种数据了解大棚环境和作物状态,数据全面准确。
32.进一步,所述远程遥控终端1内部储存农作物不同生长期的图片,对比接收到的农作物生长图像数据与储存的图片判断农作物的生长期,然后根据农作物的生长期所需的光照强度生成光照控制指令,所述光照控制指令携带驱动电机23212的转动角度,所述转动角度与农作物的生长期所需的光照强度成正相关;所述控制中心21接收所述远程遥控终端1发送的光照控制指令并控制所述驱动电机23212转动。农作物的生长期可分为幼苗期、拔苗期、生长期、开花期等,不同时期的作物需要的光照不一样,当检测到光照不足以满足生长期所需光照时时可以打开第一安装支架板和第二安装支架板使光线照射到大棚,并能根据作物生长所需光照条件调整第一安装支架板和第二安装支架板的角度,为作物提供适宜的光照条件,利于作物生长。
33.虽然本发明已利用上述较佳实施例进行说明,但其并非用以限定本发明的保护范围,任何本领域技术人员在不脱离本发明的精神和范围之内,相对上述实施例进行各种变动与修改仍属于本发明所保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1