一种自由落体式全自动智能连续捕鼠器的制作方法
1.本发明涉及捕鼠器技术领域,尤其涉及一种自由落体式全自动智能连续捕鼠器。
背景技术:
2.在一些餐饮加工、食品贮存、养殖场、超市、仓库、市场、变电站等不宜投放鼠药、鼠集中活动场所,通常需要使用到机械捕鼠器进行物理法捕鼠。现有技术中的捕鼠器,结构简陋,在工作时,一是捕鼠器明显阻挡了鼠“路”,因“新物反应”,鼠类短时间内不会上当,聪明鼠类永不上当,二是捕鼠与储鼠合为一体,被捕鼠类在危险时会在箱体内释放“危险信号”,从而影响后续鼠类进入,有时是“捕鼠一次,作废一个”(捕鼠器);三是捕捉后的老鼠不能及时清理,产生较大的环境污染,四是捕鼠需要较大的人工管理成本,因此,设计一种自由落体式全自动智能连续捕鼠器是很有必要的。
技术实现要素:
3.发明理念:一是不影响老鼠的行走路径,二是不能伤害老鼠,三是捕鼠与储鼠物理分离。本发明解决的问题在于提供一种自由落体式全自动智能连续捕鼠器,体积小巧,操作简单,能够实现长时间无人管理,减少人工管理成本;一是在使用时,不阻挡老鼠的行走路径,不引起老鼠的“新物反应”,加之内投饵料,诱鼠效果好;二是鼠类进入捕鼠器内,被迫进入储鼠组件前,除受惊吓外,身体未受伤害,不释放“危险信号”;鼠类被迫进入储鼠组件最后进入水桶后鼠类感到危险,但“危险信号”因整个鼠身浸在液体内和封闭容器原因不能外传,做到捕鼠与储鼠的物理“分离”,不影响后续鼠类的进入,解决了机械捕鼠一次后续鼠类很难进入的难题,三是不产生二次污染,只需定期将水桶内死体鼠类和液体倾倒更换,方便快捷。
4.为了实现上述目的,本发明采用了如下技术方案:
5.一种自由落体式全自动智能连续捕鼠器,包括箱体、传动板、设备壳、驱鼠组件、连动组件、储鼠组件和电控板,所述箱体的顶部端面固定安装有传动板,且传动板的端面设置有连动组件,所述箱体的内部设置有驱鼠组件,且连动组件与驱鼠组件连接,所述箱体的一端中央通过螺钉固定安装有设备壳,所述设备壳的一侧安装有储鼠组件,所述箱体的外壁一侧固定安装有电控板;
6.所述驱鼠组件包括识别孔、红外传感器、压缩板、连动板、安装侧板、封堵板和固定卡扣,所述红外传感器固定安装在设备壳的内侧底部一端,所述箱体的端面一侧中央底部开设有识别孔,所述箱体的内侧设置有压缩板,所述压缩板的两侧端面与箱体的内壁贴合连接,且所述压缩板中间呈漏斗形的腔体底口通过螺钉固定安装有连动板,所述安装侧板固定安装在箱体的两侧端面,所述安装侧板的外侧滑动安装有封堵板,且封堵板一端中央固定安装有固定卡扣。
7.作为本发明进一步的方案:所述传动板的顶部端面卡接安装有防护盖板,且防护盖板的顶部端面通过螺钉固定安装有提拉握把。
8.作为本发明进一步的方案:所述箱体的内部另一端对应识别孔的位置处固定安装有反光板,且红外传感器的一端穿过识别孔与反光板处于同一条轴线上。
9.作为本发明进一步的方案:所述红外传感器与电控板电性连接。
10.作为本发明进一步的方案:所述安装侧板和封堵板的一端两侧均开设有滑动槽,所述封堵板另一端的滑动块插接安装在安装侧板一端的滑动槽的内部。
11.作为本发明进一步的方案:所述储鼠组件包括进鼠孔、单向门、捕鼠板、下料板、投料端盖、连通箱和内有攀爬网的通道,所述进鼠孔开设在箱体端面一侧识别孔的顶部上方,所述进鼠孔的外部一侧位于设备壳的内部固定安装有单向门,所述捕鼠板固定安装在设备壳内侧底部,所述设备壳的顶部端面通过合页固定安装有投料端盖,所述设备壳的内侧顶部位于投料端盖的下方安装有下料板,且下料板的一端位于单向门的外侧,所述设备壳的端面一侧连接安装有连通箱,且连通箱的内部与捕鼠板的顶部连通,所述连通箱的一端顶部插接安装有内有攀爬网的通道。
12.作为本发明进一步的方案:所述内有攀爬网的通道的内壁固定安装有铁丝网,所述内有攀爬网的通道的顶部一端连接安装有连接盒,且铁丝网的两端分别位于连通箱和连接盒的内部,所述连接盒的一端连接安装有水箱。
13.作为本发明进一步的方案:所述连动组件包括传动壳体、感应凸扣、第一电机、第一转盘、第一行程开关、第二电机、第二转盘、第三转盘、第一钢索、第二钢索、第一导轮、第二导轮和第二行程开关,所述传动壳体设置在传动板的顶部上方,所述传动板的一端两侧分别固定安装有第一电机和第二电机,所述传动板的顶部上方设置有传动壳体,所述传动壳体的端面中央通过第一转动轴连接安装有第一转盘,所述第一转盘的两端分别设置有第一钢丝扣,所述传动壳体的顶部端面一侧安装有第一行程开关,所述传动壳体的端面两侧均安装有第一导轮,所述第一电机通过第二钢索与第一钢丝扣固定连接,且所述第一钢丝扣通过一根钢丝绳的两头分别绕过两个第一导轮与压缩板两端连接,所述传动板的顶部端面一端固定安装有感应凸扣,且感应凸扣与红外传感器电性连接,所述传动板的顶部端面两侧均固定安装有第二导轮,所述传动板的顶部端面一侧通过第二转动轴设置有第三转盘,所述第三转盘的顶部通过第二转动轴设置有第二转盘,所述第二转盘与传动板顶部之间连接安装有复位弹簧,所述第三转盘的端面位于安装的第二钢丝扣和挡板之间设置有缺口,所述第二转盘的一端设置有第三钢丝扣和尖角凸起,所述第二电机通过第一钢索与第三钢丝扣连接,所述第二钢丝扣通过一根钢丝绳分别绕过两个第二导轮与两侧的封堵板连接,所述传动板顶部靠近感应凸扣位置处设置有第二行程开关,所述第二行程开关与电控板电性连接。
14.本发明的有益效果是:该自由落体式全自动智能连续捕鼠器,包括箱体、传动板、设备壳、驱鼠组件、连动组件、储鼠组件和电控板;该自由落体式全自动智能连续捕鼠器,结构简单,体积小巧,操作简单,能够实现无人管理,减少人工管理成本;不阻挡老鼠的行走路径,不引起老鼠的“新物反应”,加之内投饵料,诱鼠效果好;鼠类进入捕鼠器内,被迫进入储鼠组件前,除受惊吓外,身体未受伤害,不释放“危险信号”;鼠类被迫进入储鼠组件最后进入水桶后鼠类感到危险,但“危险信号”因整个鼠身浸在液体内和封闭容器原因不能外传,做到捕鼠与储鼠的物理“分离”,不影响后续鼠类的进入,解决了机械捕鼠一次后续鼠类很难进入的难题,而且,不产生二次污染,只需定期将水桶内死体鼠类和液体倾倒更换,方便
快捷。
附图说明
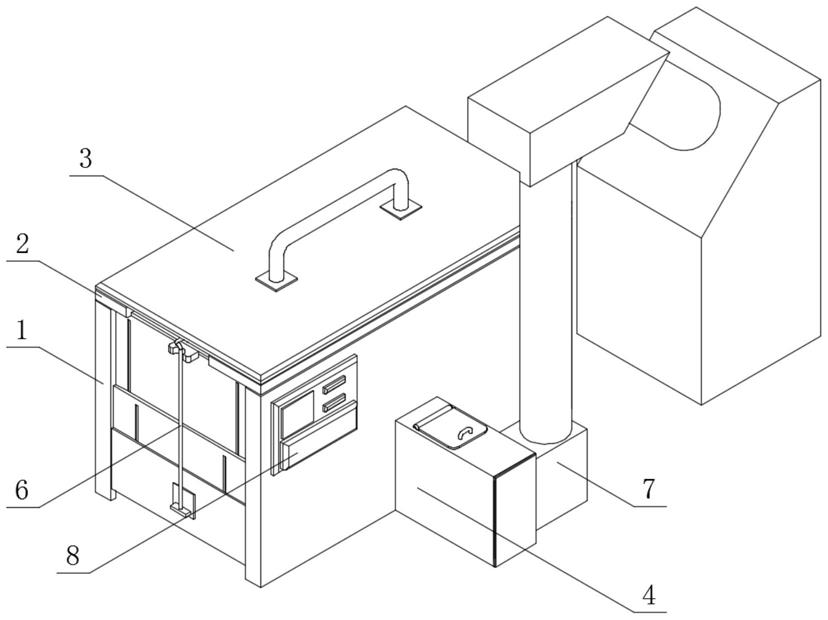
15.图1为本发明的整体结构示意图;
16.图2为本发明的箱体的内部剖视图;
17.图3为本发明的连动组件的结构示意图;
18.图4为本发明的传动壳体的俯视图;
19.图5为本发明的传动板的俯视图;
20.图6为本发明的储鼠组件的结构示意图;
21.图7为本发明的储鼠组件的第一剖视图;
22.图8为本发明的储鼠组件的第二剖视图;
23.图例说明:1、箱体;2、传动板;3、防护盖板;4、设备壳;5、驱鼠组件;6、连动组件;7、储鼠组件;8、电控板;51、识别孔;52、红外传感器;53、压缩板;54、连动板;55、安装侧板;56、封堵板;58、固定卡扣;61、传动壳体;62、感应凸扣;63、第一电机;64、第一转盘;65、第一行程开关;66、第二电机;67、第二转盘;68、第三转盘;69、第一钢索;610、第二钢索;611、第一导轮;612、第二导轮;613、第二行程开关;71、进鼠孔;72、单向门;73、捕鼠板;74、下料板;75、投料端盖;76、连通箱;77、内有攀爬网的通道;78、连接盒;79、水箱。
具体实施方式
24.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
25.下面给出具体实施例。
26.参见图1
‑
8,一种自由落体式全自动智能连续捕鼠器,包括箱体1、传动板2、设备壳4、驱鼠组件5、连动组件6、储鼠组件7和电控板8,箱体1的顶部端面固定安装有传动板2,传动板2的顶部端面卡接安装有防护盖板3,且防护盖板3的顶部端面通过螺钉固定安装有提拉握把,便于提取箱体1,方便移动;且传动板2的端面设置有连动组件6,箱体1的内部设置有驱鼠组件5,且连动组件6与驱鼠组件5连接,箱体1的一端中央通过螺钉固定安装有设备壳4,设备壳4的一侧安装有储鼠组件7,箱体1的外壁一侧固定安装有电控板8,便于电性控制;
27.驱鼠组件5包括识别孔51、红外传感器52、压缩板53、连动板54、安装侧板55、封堵板56和固定卡扣57,红外传感器52固定安装在设备壳4的内侧底部一端,箱体1的内部另一端对应识别孔51的位置处固定安装有反光板,且红外传感器52的一端穿过识别孔51与反光板处于同一条轴线上;红外传感器52与电控板8电性连接;便于红外感应老鼠,方便下一步工作;箱体1的端面一侧中央底部开设有识别孔51,箱体1的内侧设置有压缩板53,压缩板53的两侧端面与箱体1的内壁贴合连接,且压缩板53中间呈漏斗形的腔体底口通过螺钉固定安装有连动板54,安装侧板55固定安装在箱体1的两侧端面,安装侧板55的外侧滑动安装有封堵板56,且封堵板56一端中央固定安装有固定卡扣57;安装侧板55和封堵板56的一端两
侧均开设有滑动槽,封堵板56另一端的滑动块插接安装在安装侧板55一端的滑动槽的内部,便于安装和拆卸,方便活动;能够将老鼠封堵在箱体1的内部,便于后续能够对老鼠进行捕捉;
28.储鼠组件7包括进鼠孔71、单向门72、捕鼠板73、下料板74、投料端盖75、连通箱76和内有攀爬网的通道77,进鼠孔71开设在箱体1端面一侧识别孔51的顶部上方,进鼠孔71的外部一侧位于设备壳4的内部固定安装有单向门72,捕鼠板73固定安装在设备壳4内侧底部,设备壳4的顶部端面通过合页固定安装有投料端盖75,设备壳4的内侧顶部位于投料端盖75的下方安装有下料板74,且下料板74的一端位于单向门72的外侧,设备壳4的端面一侧连接安装有连通箱76,且连通箱76的内部与捕鼠板73的顶部连通,连通箱76的一端顶部插接安装有内有攀爬网的通道77;内有攀爬网的通道77的内壁固定安装有铁丝网,内有攀爬网的通道77的顶部一端连接安装有连接盒78,且铁丝网的两端分别位于连通箱76和连接盒78的内部,连接盒78的一端连接安装有水箱79;通过储鼠组件7能够将老鼠进行捕捉和储放;
29.连动组件6包括传动壳体61、感应凸扣62、第一电机63、第一转盘64、第一行程开关65、第二电机66、第二转盘67、第三转盘68、第一钢索69、第二钢索610、第一导轮611、第二导轮612和第二行程开关613,传动壳体61设置在传动板2的顶部上方,传动板2的一端两侧分别固定安装有第一电机63和第二电机66,传动板2的顶部上方设置有传动壳体61,传动壳体61的端面中央通过第一转动轴连接安装有第一转盘64,第一转盘64的两端分别设置有第一钢丝扣,传动壳体61的顶部端面一侧安装有第一行程开关65,传动壳体61的端面两侧均安装有第一导轮611,第一电机63通过第二钢索610与第一钢丝扣固定连接,且第一钢丝扣通过一根钢丝绳的两头分别绕过两个第一导轮611与压缩板53两端连接,传动板2的顶部端面一端固定安装有感应凸扣62,且感应凸扣62与红外传感器52电性连接,传动板2的顶部端面两侧均固定安装有第二导轮612,传动板2的顶部端面一侧通过第二转动轴设置有第三转盘68,第三转盘68的顶部通过第二转动轴设置有第二转盘67,第二转盘67与传动板2顶部之间连接安装有复位弹簧,第三转盘68的端面位于安装的第二钢丝扣和挡板之间设置有缺口,感应凸扣62位于第三转盘68下方位置,用于感应凸扣62弹起阻挡挡板,第二转盘67的一端设置有第三钢丝扣和尖角凸起,尖角凸起用于推动第二钢丝扣从而带动第三转盘68一起转动;第二电机66通过第一钢索69与第三钢丝扣连接,第二钢丝扣通过一根钢丝绳分别绕过两个第二导轮612与两侧的封堵板56连接,传动板2顶部靠近感应凸扣62位置处设置有第二行程开关613,第二行程开关613与电控板8电性连接;
30.第一电机63每分钟x转,第二电机66是每分钟y转,第一电机63的转速与压缩板53的速度相同;当第二转盘67带动着第三转盘68运动,当运动到第三转盘68被感应凸扣62拐住时,同时触动到第二行程开关613,此时第二电机66反方向运动,这时,第三转盘68被感应凸扣62拐住,第二转盘67在电机回转和反向弹簧的作用下回转,回转z秒,距离是80mm左右,预留出第三转盘68一旦感应凸扣62脱落,快速以自由落体速度下落。
31.本发明的工作原理:使用时,通过防护盖板3顶部的提拉握把将箱体1移动到使用位置,通过电控板8能够进行电控,通过连动组件6能够对驱鼠组件5提供动力,通过驱鼠组件5能够将老鼠驱赶到储鼠组件7,并通过储鼠组件7将老鼠进行储放捕捉;在日常使用时,封堵板56处于打开的状态,此时,感应凸扣62通过第三转盘68端面的挡板将第三转盘68限
位止挡,在箱体1的内部,压缩板53和54位于箱体1的内侧顶部,将投料端盖75打开后,将饵料投放到设备壳4的内部,饵料掉落到下料板74上,并通过下料板74掉落到捕鼠板73的顶部,从而具有诱鼠效果,当老鼠进入到箱体1的内部时,老鼠在箱体1的内部移动,当老鼠移动到识别孔51外侧时,红外传感器52发射的信号被老鼠阻挡,反光板无法接收到信号,红外传感器52和储鼠组件7将信号通过电控板传递到传动板2顶部的感应凸扣62、第一电机63和第二电机66,感应凸扣62落下后,使得第三转盘68迅速旋转,从而带动封堵板56在失去拉力的情况下迅速自由下落,从而将箱体1的两侧封堵,使得老鼠被封堵在箱体1的内部,第一电机63正转,通过第二钢索610拉动第一转盘64端面的第一钢丝扣,使得第一转盘64逆时针转动,从而将压缩板53在箱体1的内部下移,逐渐压缩老鼠的活动空间,直到将老鼠压缩到中间部位,被红外线传感器实时监控。使得老鼠能够通过进鼠孔71,当红外传感器52感应不到老鼠15秒后,第一电机63反转,通过第二钢索610和第一钢丝扣使得第一转盘64顺时针转动,直到第一转盘64与第一行程开关65接触,第二电机66工作,第二电机66通过第一钢索69和第三钢丝扣带动第二转盘67和第三转盘68逆时针转动,当第三转盘68的缺口移动到感应凸扣62上部后,同时第三转盘68触碰到第二行程开关613,使第二电机66反转,通过挡板将第三转盘68卡住,第二转盘67在反向弹簧的作用下顺时针转动15秒,使得第二转盘67复位,第三转盘68转动到被限位的过程,是封堵板56拉升的过程;通过进鼠孔71的老鼠闯开单向门72后进行捕鼠板73的顶部端面,由于老鼠无法再通过单向门72进入到箱体1的内部,使得老鼠能够进入到连通箱76的内部,并通过内有攀爬网的通道77内部的铁丝网进入到连接盒78,连接盒78内部的老鼠会落入到水箱79的内部,从而完成捕鼠和储鼠。
32.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1