一种双边遥操作的模拟钓鱼系统、方法及可存储介质与流程
1.本发明涉及双边遥操作领域,更具体的说是涉及一种双边遥操作的模拟钓鱼系统、方法及可存储介质。
背景技术:
2.钓鱼是我们广大钓友的一大乐趣,更是我们人类释放工作压力,舒展心灵,陶冶情操的很好方式。但是这种传统钓鱼方式虽然通过远程跋涉锻炼了身体,同时也带来了很多麻烦和危险因素。
3.目前,现有技术中都没有突破人不在现场可以钓鱼的传统方式,现场的弊端就是人在赴现场钓鱼的过程中浪费了时间,耗费了资源,还有很多不可确定的安全因素。
4.随着网络视频和远程自动控制科学技术的普及,为我们带来了革新传统钓鱼方式的创新机会。为了克服上述传统钓鱼的诸多缺陷,亟需一种远程操控的钓鱼系统及方法。
技术实现要素:
5.有鉴于此,本发明提供了一种双边遥操作的模拟钓鱼系统、方法及可存储介质。
6.为了实现上述目的,本发明采用如下技术方案:
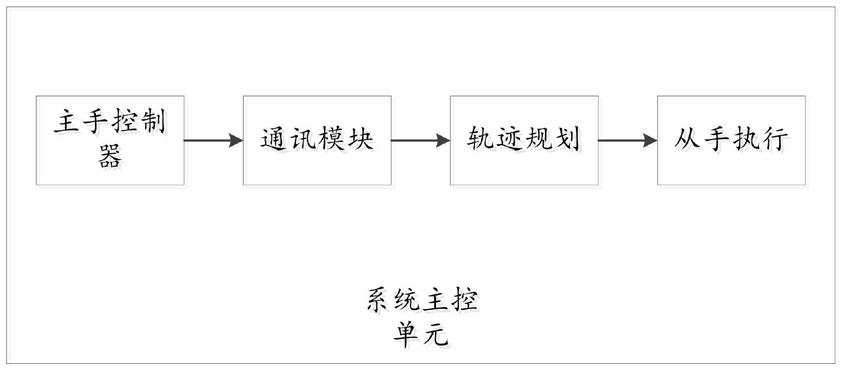
7.一种双边遥操作的模拟钓鱼系统,包括双边遥操作系统,所述双边遥操作系统包括系统主控单元,主手控器单元,轨迹规划单元,通讯模块,从手执行单元,操作图像实时显示单元;所述系统主控单元与所述主手控器单元,所述轨迹规划单元,所述通讯模块,所述从手执行单元以及所述操作图像实时显示单元连接;所述主手控器单元与所述通讯模块连接,所述通讯模块还与所述从手执行单元连接;所述轨迹规划单元用于根据所述主手控制器单元的指令规划垂钓路径,还用于实景显示,并传输给所述操作图像实时显示单元。
8.可选的,所述从手执行单元设置有垂钓台架;所述垂钓台架上连接固定有垂钓竿位移遥控机构、绕线轮旋转遥控机构以及鱼篓。
9.可选的,所述垂钓竿上安装有压力传感器,电击发生器;所述绕线轮旋转遥控机构上安装有角度传感器。
10.可选的,所述轨迹规划单元包括视频采集系统以及声音采集系统;所述视频采集系统与所述声音采集系统采集的信息传输给系统主控单元。
11.可选的,还包括模拟控制单元与数字控制单元;所述模拟数字单元与所述数字控制单元并联连接到所述系统主控单元上。
12.以上技术方案具有以下有益效果:
13.既能有效降低控制器离散化对双边遥操作系统的影响,又能在保证系统稳定性的同时提高控制增益上限,能有助于系统稳定性和性能的提高;该方法结合可编程模拟门阵列fpaa,能设计出基于混合方法控制下的双边遥操作系统,能够使双边遥系统同时具有基于fpaa控制和数字控制相结合的优势。
14.一种双边遥操作的模拟钓鱼方法,包括以下步骤:
15.接收垂钓的指令;
16.根据指令做出垂钓路径规划;
17.根据垂钓路径规划,做出垂钓动作。
18.可选的,垂钓的指令获取的具体过程为:将垂钓者对主手控器的操作转化为期望轨迹,并将期望轨迹数字化。
19.可选的,垂钓路径规划具体为:根据垂钓的指令,利用主从控制算法对从手执行单元实施直角坐标空间的操作控制。
20.可选的,垂钓路径规划具体为:根据垂钓的指令,利用双边控制算法,对从手执行单元实施直接操作控制。
21.一种计算机可存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序为被处理器执行时实现所述的双边遥操作的模拟钓鱼方法的步骤。
22.经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种双边遥操作的模拟钓鱼系统、方法及可存储介质,可以极大满足那些有钓鱼欲望,又没有时间或者其它条件亲临现场钓鱼的钓友,可以坐在家里通过网络视频和电脑遥控钓鱼,身临其境的观察鱼儿活动,感受到水底世界的奇妙,将达到释放工作压力,舒展心灵,陶冶情操的有益效果,是现有传统钓鱼方式所不能够显而易见的。还可以使开发者获得尚待规模开发的野生鱼类资源,通过钓大鱼放鱼苗的方式,提高野生鱼类资源的规模开发效益,保护野生鱼类资源的可持续发展。
附图说明
23.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
24.图1为本发明的结构示意图;
25.图2为本发明的实施例示意图。
具体实施方式
26.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.本发明实施例公开了一种双边遥操作的模拟钓鱼系统,如图1-2所示,包括双边遥操作系统,双边遥操作系统包括系统主控单元,主手控器单元,轨迹规划单元,通讯模块,从手执行单元,操作图像实时显示单元;系统主控单元与主手控器单元,轨迹规划单元,通讯模块,从手执行单元以及操作图像实时显示单元连接;主手控器单元与通讯模块连接,通讯模块还与从手执行单元连接;轨迹规划单元用于根据主手控制器单元的指令规划垂钓路径,还用于实景显示,并传输给操作图像实时显示单元。
28.其中,手控器是双边遥操作技术实现中的关键部分,作为人机接口设备,其性能好
坏直接影响双边遥操作的效率。手控器是主从控制和双边控制的基本组件,其作用是把操作人员对手柄的操作转化成遥操作机器人的期望轨迹。手控器由主手和主手控制器组成。一方面应用主从控制算法,可以对远端机械手末端位置实施直角坐标空间的操作控制;一方面应用双边控制算法,可以对远端机械手末端位置主手控制器组成。
29.随着双边控制研究的兴起,出现了采用并联机构设计的手控器。其本质上一方面要实现主手位置或速度向从手位置或速度的转换,而另一方面要使操作人员通过肌肉感觉获得从手的位置或速度运动状态,即所谓的力感觉。与串联形式的手控器相比,采用并联机构设计的手控器具有天生机械刚度,能够容易获得这种硬接触感觉,成为力反射手控器的发展趋势。
30.在本实施例中,从手执行单元设置有垂钓台架;垂钓台架上连接固定有垂钓竿位移遥控机构、绕线轮旋转遥控机构以及鱼篓;垂钓竿上安装有压力传感器,电击发生器;绕线轮旋转遥控机构上安装有角度传感器;轨迹规划单元包括视频采集系统以及声音采集系统;视频采集系统与声音采集系统采集的信息传输给系统主控单元。
31.在本实施例中,还包括模拟控制单元与数字控制单元;模拟数字单元与数字控制单元并联连接到系统主控单元上。
32.以上技术方案具有以下有益效果:
33.既能有效降低控制器离散化对双边遥操作系统的影响,又能在保证系统稳定性的同时提高控制增益上限,能有助于系统稳定性和性能的提高;该方法结合可编程模拟门阵列fpaa,能设计出基于混合方法控制下的双边遥操作系统,能够使双边遥系统同时具有基于fpaa控制和数字控制相结合的优势。
34.一种双边遥操作的模拟钓鱼方法,包括以下步骤:
35.接收垂钓的指令;
36.根据指令做出垂钓路径规划;
37.根据垂钓路径规划,做出垂钓动作。
38.其中,垂钓的指令获取的具体过程为:将垂钓者对主手控器的操作转化为期望轨迹,并将期望轨迹数字化;垂钓路径规划具体为:根据垂钓的指令,利用主从控制算法对从手执行单元实施直角坐标空间的操作控制。垂钓路径规划还可以为:根据垂钓的指令,利用双边控制算法,对从手执行单元实施直接操作控制。
39.在本实施例中,垂钓台架是这样运行的:首先将遥控云台组件连接固定在钓鱼台架上,将钓鱼竿安装固定在遥控操作云台上,运行时首先将遥控云台控制器和灵镜控制器的电源,以及控制遥控数据线接入现场电器控制箱,启动遥控云台电源,可以使钓鱼竿遥控云台能够水平旋转和上下位移,钓鱼数据线组件的一端固定在钓鱼竿上,另一端安装有钓鱼钩组件和水下照明和视频声音采集播放组件,钓鱼钩由遥控挂鱼饵组件挂鱼饵,浮漂由太空豆限位,太空豆由太空豆移位组件移位,收获的鱼装入防盗鱼篓组件。
40.频声音采集传输系统是这样运行的:首先将视频摄像机固定在遥控操作云台上,并接通电源和数据线,水下视频声音采集的信息由钓鱼数据线组件,并入摄像头灵镜控制器和遥控云台控制器数据一起、经过视频服务器解码、编码和压缩处理后,经过有线网络或者无线网桥接入局域网络管理终端处理,再由wifi网络或4g网络、5g网络接入系统主控单元。
41.一种计算机可存储介质,计算机存储介质上存储有计算机程序,计算机程序为被处理器执行时实现的一种双边遥操作的模拟钓鱼方法的步骤。
42.本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
43.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1