一种移动式液态肥料自动混合注肥装置
1.本技术涉及恒压注肥设备技术领域,具体涉及一种移动式液态肥料自动混合注肥装置。
背景技术:
2.目前,液体肥因其生产费用低、养分含量高、易于复合、能直接被农作物吸收、便于配方施肥和便于机械化施肥的特点,越来越受到人们关注。现有的灌溉施肥方式有机械注入式,水力驱动比例式施肥泵、压差式施肥罐和文丘里施肥器等。上述灌溉施肥方式除机械注入式外,难以实现自动化控制,且只能对单一肥料溶液或者营养液进行实时施肥,若要施用多种肥液或者营养液,达到恒压注肥的效果,只能分时进行或预先通过人工将多种肥料溶液或营养液混合,费时费力,容易造成预混肥液的浪费。
3.综上所述,目前恒压注肥领域的不足之处在于性价比不高且难以达到自动控制。
技术实现要素:
4.针对现有技术中存在的问题,本技术提供一种能同时对多种肥液进行混合施肥的恒压注肥装置,以更高效和更便捷的方式施肥。
5.为实现上述目的,本技术提供的一种移动式液态肥料自动混合注肥装置,包括:移动框架、混合注肥系统和控制系统;
6.所述混合注肥系统包括肥液桶、清水桶、混合箱、可调转速搅拌机和注肥泵,所述混合箱固设于移动框架内的下部,所述肥液桶为多个,所述清水桶和多个肥液桶均固设于移动框架内的上部,且清水桶的输液端和多个肥液桶的输液端均与混合箱的进液端连通,所述肥液桶的输液端设有第一电磁阀,所述清水桶的输液端设有第二电磁阀,所述肥液桶和清水桶内均装设有液位计,所述注肥泵的进液端与混合箱的输液端连接,所述注肥泵的输液端用于向外输出肥料,所述可调转速搅拌机的动力组件设于混合箱的外侧,所述可调转速搅拌机的搅拌组件可转动设于混合箱内;
7.所述控制系统包括控制箱、控制器、显示面板、单片机、液位无线接收器和压力传感器;
8.所述控制箱固设于移动框架内的上部,所述单片机装设于控制箱内,所述显示面板、液位无线接收器和控制器装设于控制箱的表面,所述第一电磁阀和第二电磁阀均通过电磁阀驱动电路与单片机电性连接,多个所述液位计均通过液位无线接收器将数据传输给单片机,所述单片机根据控制器预设的浓度和注入量,基于pwm原理,控制第一电磁阀和第二电磁阀对多种肥料同时进行混合控制,并通过显示电路在显示面板展示混合数据;
9.所述压力传感器装设于注肥泵的输液管路上,所述压力传感器通过信号调理电路与单片机电性连接,所述单片机采集压力传感器的数据并基于pid算法,调节可调转速搅拌机的转速。
10.在上述技术方案中,本技术还可以做如下改进:
11.所述可调转速搅拌机包括:变频电机、传动主轴、夹板体和搅拌叶片,所述变频电机固设于混合箱的外侧,所述变频电机的输出端传动连接有可转动轴向贯穿混合箱的传动主轴,所述传动主轴的轴向均匀固设有多个夹板体,每个所述夹板体均沿传动主轴径向贯穿设置有搅拌叶片。
12.优选的,所述搅拌叶片包括搅拌杆和搅拌片,所述搅拌杆的中部固定贯穿夹板体的一端,所述搅拌杆的两端分别设有搅拌片。
13.优选的,相邻的两个搅拌叶片上下错位设置。
14.优选的,还包括装设于移动框架侧壁的降温风机,所述降温风机的输风端面向变频电机和注肥泵。
15.优选的,还包括装设于注肥泵的输液管路上的压力缓冲罐和止回阀,所述止回阀位于注肥泵的输液管路的始端,所述压力传感器位于注肥泵的输液管路的中部,所述压力缓冲罐位于止回阀与压力传感器之间。
16.优选的,还包括装设于注肥泵的输液管路末端的电控出液阀。
17.优选的,所述混合箱的内底壁近排液部至远排液部成1
°‑5°
的上坡。
18.优选的,所述控制箱内装设与单片机电性连接的多个液位显示仪,所述液位显示仪与液位计一一对应设置。
19.优选的,所述移动框架包括:支撑架、储料箱体、动力箱体和控制系统保护箱,所述支撑架的底部边角处设有移动轮,所述储料箱体设于支撑架内的左侧,所述控制系统保护箱和动力箱体上下叠加设于支撑架内的右侧,所述储料箱体的上端为敞口端。
20.本技术的有益效果:
21.本技术的一种移动式液态肥料自动混合注肥装置,采用自动化设计并配置有移动轮,便于移动,压力可调,占地面积小、能同时对多种肥液或营养液进行恒压施肥;通过加装压力缓冲罐,有效消除了出液时,因出液压力波动而引起的出液管压力大幅上升或跌落,使得整个装置可以更稳定得进行恒压注肥控制;同时,压力传感器可以实时监测到恒压注肥的压力变化,当前出液压力与恒压注肥压力的差值,利用pid算法,对其进行闭环控制,使装置更快捷、更准确地进行恒压注肥控制,可在实验室或其他较平整地地面可以高效、便捷、稳定地灌溉施肥。
附图说明
22.为了更清楚地说明本技术具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。
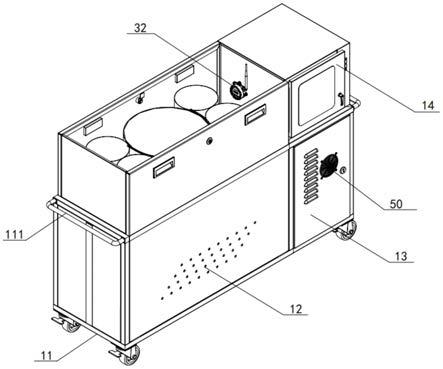
23.图1是本技术实施例的一种移动式液态肥料自动混合注肥装置的立体示意图;
24.图2是图1的主剖视图;
25.图3是图1的俯视图;
26.图4图2中控制箱的结构的示意图;
27.图5图2中搅拌机构的立体示意图;
28.图6是图2中注肥泵处的结构示意图;
29.图7是本技术实施例的一种移动式液态肥料自动混合注肥装置的电路原理图。
30.附图中,
31.移动框架10、支撑架11、推拉手柄111、移动轮112、储料箱体12、动力箱体13、控制系统保护箱14、肥液桶20、第一电磁阀200、清水桶21、进水电磁阀211、第二电磁阀210、混合箱22、注肥泵24、液位计25、压力缓冲罐26、止回阀27、电控出液阀28、液位显示仪29、控制箱30、显示面板31、液位无线接收器32、压力传感器33、选择键341、“+”按键342、
“‑”
按键343、确认键344、启停旋钮345、急停按钮346、变频电机40、传动主轴41、夹板体42、搅拌杆43、搅拌片44、螺柱螺母45、降温风机50。
具体实施方式
32.以下结合附图以及具体实施例,对本技术的技术方案进行详细描述。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
33.请参阅图1至图7,本实施例公开一种移动式液态肥料自动混合注肥装置,其包括移动框架10、混合注肥系统和控制系统;
34.如图1至图3所示,混合注肥系统包括肥液桶20、清水桶21、混合箱22、可调转速搅拌机和注肥泵24,所述混合箱22固设于移动框架10内的下部,所述肥液桶20为多个,所述清水桶21和多个肥液桶20均固设于移动框架10内的上部,且清水桶21的输液端和多个肥液桶20的输液端均与混合箱22的进液端连通,所述肥液桶20的输液端设有第一电磁阀200,所述清水桶21的输液端设有第二电磁阀210,所述肥液桶20和清水桶21内均装设有液位计25,所述注肥泵24的进液端与混合箱22的输液端连接,所述注肥泵24的输液端用于向外输出肥料,所述可调转速搅拌机的动力组件设于混合箱22的外侧,所述可调转速搅拌机的搅拌组件可转动设于混合箱22内;
35.在具体实施例中,肥液桶20的数量至少为两个,一般可根据使用场地自主选择,在本实施例中,肥液桶20的数量为四个,具体使用时,可根据使用场地选择一至四同时使用或部分使用。
36.所述控制系统包括控制箱30、控制器、显示面板31、单片机、液位无线接收器32和压力传感器33;
37.所述控制箱30固设于移动框架10内的上部,所述单片机装设于控制箱30内,所述显示面板31、液位无线接收器32和控制器装设于控制箱30的表面,所述第一电磁阀200和第二电磁阀210均通过电磁阀驱动电路与单片机电性连接,多个液位计25均通过液位无线接收器32将数据传输给单片机,所述单片机根据控制器预设的浓度和注入量,基于pwm原理,控制第一电磁阀200和第二电磁阀210对多种肥料同时进行混合控制,并通过显示电路在显示面板31展示混合数据;
38.所述压力传感器33装设于注肥泵24的输液管路上,所述压力传感器33通过信号调理电路与单片机电性连接,所述单片机采集压力传感器33的数据并基于pid算法,调节可调转速搅拌机的转速。
39.如图4所示,在实施例中,控制器包括选择键341、“+”按键342、
“‑”
按键343以及确认键344,其中,选择键341用于选择输入肥液的浓度、注液量和出液压力,“+”按键342、
“‑”
按键343用于对对应的数据进行加减选择,确认键344用于确认数据。
40.在实施例中,控制器包括启停旋钮345,所述启停旋钮345用于自动混合注肥装置的启动与关闭。
41.使用本技术的移动式液态肥料自动混合注肥装置时,包括如下步骤:
42.s10、将注肥装置的电源模块输入端接入220v市电通电;
43.s20、向清水桶21注满清水或接入注水管,同时向多个肥液桶20加入不同种类的肥液原料;
44.s30、观察显示面板31显示的数据,先用选择键341选择为“浓度”,利用“+”按键342和
“‑”
按键343选择目标浓度,选定后按下确认键344返回;其次按下选择键341选择为“目标恒压值”,利用“+”按键342和
“‑”
按键343选择目标恒压值,选定后按下确认键344返回;再次按下选择键341选择为“目标注液量”,利用“+”按键342和
“‑”
按键343选择目标注液量,选定后按下确认键344返回;最后按下选择键341选择为“目标运行时间”,利用“+”按键342和
“‑”
按键343选择目标运行时间,选定后按下确认键344。
45.s40、启停旋钮345旋至“启动”状态,单片机控制第一电磁阀200和第二电磁阀210开始注液,可调转速搅拌机带动搅拌杆43开始转动。
46.s50、肥液充分混合,开启注肥泵24出液;待设定注液量达成后,各第一电磁阀200和第二电磁阀210自动关闭,工作停止。
47.在本实施例中,控制器包括急停按钮346,设备在工作过程中,如遇到紧急情况,工作人员只需按下急停按钮346,即可使其停止工作。
48.在本实施例中,所述控制箱30内装设与单片机电性连接的多个液位显示仪29,所述液位显示仪29与液位计25一一对应设置,通过液位显示仪29可实时展示肥液桶20、清水桶21的剩余量。
49.在本技术一可选的实施例中,混合箱22的内底壁近排液部至远排液部成1
°‑5°
的上坡,优选的,混合箱22为水平放置且具有3
°
上坡的两端桶径不同的圆台状桶,在一具体实施例中,混合箱22的内大径为49.5cm,内小径为41.5cm,长105cm,由不锈钢sus304材质制成;
50.多个肥液桶20的规格一致,优选外径为25cm,内径为24.5cm;清水桶21的外径为50cm,内径为24.5cm;肥液桶20竖直放置的底部圆弧度趋近于0,由pvc材质制成;
51.在本技术一可选的实施例中,混合箱22外壁上部设有三脚架,清水桶21和肥液桶20固定在三角架上。
52.在本技术一可选的实施例中,清水桶21上装设有进水电磁阀211,进水电磁阀211与单片机电性连接,通过单片机可控制清水桶21的进水量。
53.在本技术一可选的实施例中,混合箱22的底部设有排空电磁阀,通过排空电磁阀可将混合箱22内残留的废料排出。
54.如图2所示,可调转速搅拌机包括:变频电机40、传动主轴41、夹板体42和搅拌叶片,所述变频电机40固设于混合箱22的外侧,所述变频电机40的输出端传动连接有可转动轴向贯穿混合箱22的传动主轴41,所述传动主轴41的轴向均匀固设有多个夹板体42,每个所述夹板体42均沿传动主轴41径向贯穿设置有搅拌叶片。
55.具体的,混合箱22的左右外端分别固设有轴套,传动主轴41的两端分别可转动穿设于两个轴套,使传动主轴41主体部从混合箱22的中心轴上贯穿。
56.如图6所示,所述搅拌叶片包括搅拌杆43和搅拌片44,所述搅拌杆43的中部固定贯穿夹板体42的一端,所述搅拌杆43的两端分别设有搅拌片44。
57.所述夹板体42包括相对设置的两块夹板和一组螺柱螺母45,两块夹板的一端部通过一组螺柱螺母45连接成u型结构体,所述两块夹板中部之间形成传动主轴41夹持空间,两块夹板的另一端部开设有用于固定贯穿搅拌杆43的连接孔。
58.更具体的,一组螺柱螺母45包括两根等长双头螺柱b级,两块夹板通过一组螺柱螺母45上紧提供预紧力,从而使两片夹板因力加紧后固定于传动主轴41,所述搅拌叶片通过三个螺钉固定于搅拌杆43的端部,搅拌杆43转动,使得搅拌叶片受力面积变化,从而改变搅拌液体时的搅拌角度。其中,搅拌片44呈弧形结构,由不锈钢制成;
59.在本技术一可选的实施例中,相邻的两个搅拌叶片上下错位设置,有助于增加搅拌叶片的搅拌效果。
60.在本技术一可选的实施例中,还包括装设于移动框架10侧壁的降温风机50,所述降温风机50的输风端面向变频电机40和注肥泵24,优选的,变频电机40和注肥泵24均位于移动框架10的一侧,移动框架10相对的两侧壁均装设降温风机50,降温风机50与启动旋钮电连接,启动旋钮旋至启动状态时,降温风机50开始工作。
61.如图5所示,还包括装设于注肥泵24的输液管路上的压力缓冲罐26和止回阀27,所述止回阀27位于注肥泵24的输液管路的始端,所述压力传感器33位于注肥泵24的输液管路的中部,所述压力缓冲罐26位于止回阀27与压力传感器33之间。当注肥泵24加速或者减速,压力缓冲罐26可防止出口压力骤然变动进行压力缓冲,
62.在本技术一可选的实施例中,还包括装设于注肥泵24的输液管路末端的电控出液阀28。所述止回阀27防止出口压力上升,压力缓冲罐26中液体回流。
63.在本实施例中,所述移动框架10包括:支撑架11、储料箱体12、动力箱体13和控制系统保护箱14,所述支撑架11的底部边角处设有移动轮112,所述储料箱体12设于支撑架11内的左侧,所述控制系统保护箱14和动力箱体13上下叠加设于支撑架11内的右侧,所述储料箱体12的上端为敞口端。
64.可选的,支撑架11为方型框体,支撑架11底面的边角处装设止滑万向轮,以方便液态肥料自动混合注肥装置移动。
65.可选的,支撑架11的左右侧设置有推拉手柄111,可方便推拉液态肥料自动混合注肥装置移动。
66.如图7所示,单片机的型号为msp43of149,第一电磁阀200和第二电磁阀210通过电磁阀驱动电路与msp43of149单片机相连接,多个液位计25通过过液位无线接收器32将数据传输给msp43of149单片机,msp43of149单片机再根据预设浓度和注入量,基于pwm原理,控制电磁阀的开通和关断,进行多种肥液的混合,同时计算总的肥液注入量,通过显示电路显示于显示面板31,当达到目标注入量时自动停止工作。
67.所述压力传感器33通过信号调理电路将压力信号转换为4-20ma电信号,msp43of149单片机中a/d模块采集出液压力数据,与设定的压力进行比较,利用pid算法,调节输出泵的输出频率。
68.msp43of149单片机根据无线接收器输入信号、“+”按键342、
“‑”
按键343输肥液浓度和注肥量控制第一电磁阀200、第二电磁阀210、进水电磁阀211的开通和关断,进行多种
肥液混合,根据压力传感器33输入和目标压力控制注肥泵24进行恒压灌溉施肥。
69.综上所述,本技术一种移动式液态肥料自动混合注肥装置,采用自动化设计并配置有移动轮112,便于移动,压力可调,占地面积小、能同时对多种肥液或营养液进行恒压施肥;通过加装压力缓冲罐26,有效消除了出液时,因出液压力波动而引起的出液管压力大幅上升或跌落,使得整个装置可以更稳定得进行恒压注肥控制;同时,压力传感器33可以实时监测到恒压注肥的压力变化,当前出液压力与恒压注肥压力的差值,利用pid算法,对其进行闭环控制,使装置更快捷、更准确地进行恒压注肥控制,可在实验室或其他较平整地地面可以高效、便捷、稳定地灌溉施肥。
70.以上实施例仅用以说明本技术的技术方案而非限制,尽管参照较佳实施例对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或者等同替换,而不脱离本技术技术方案的宗旨和范围,其均应涵盖在本技术的权利要求范围当中。本技术未详细描述的技术、形状、构造部分均为公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1