旋转蚕茧装置的制作方法
1.本实用新型涉及缫丝工业技术领域,尤其是一种用于检测蚕茧时控制蚕茧自动均匀旋转,以精确地对蚕茧进行检测的方法。
背景技术:
2.在缫丝工业中,蚕茧的好坏直接影响到缫丝成品质量,但由于蚕茧之间容易相互粘结,因而很难通过机械对蚕茧进行逐个检查。现有的逐个检测的方式一般通过人工检测,效率极低劳动强度较大,并且容易产生漏检的现象。还有尝试用机械方式检测的,机械结构一般包括水平平台上的输送带传输的多个蚕茧,通过输送带上方的相机拍照,将拍照信息进行处理,对每个蚕茧进行检测,但蚕茧在输送带上并不保证都在旋转,因而拍照不一定是整个蚕茧的所有表面,拍照检测的蚕茧信息不完整,检测的可靠性非常差,不足以作为判断蚕茧质量的依据。蚕茧的检测难度较大,已经成为缫丝工艺中的技术瓶颈,极大地阻碍了蚕茧的深加工。因而需要设计一套可以快速地逐个检查蚕茧的设备及方法,以满足市场的需要。
技术实现要素:
3.本实用新型所要解决的问题是提供一种旋转蚕茧装置,以解决现有机械检测蚕茧因蚕茧不能自动旋转、相互分离而造成检测可靠性差的问题。
4.为了解决上述问题,本实用新型的技术方案是:本旋转蚕茧装置包括水平的平台,所述平台上设有皮带驱动动力机驱动的皮带输送带,所述皮带输送带的上方设有链条驱动动力机驱动的链条输送链,所述链条输送链的链条间并排设置有多根横跨所述皮带输送带的推杆,所述推杆两侧的横截面均呈锐角,所述推杆间及所述皮带输送带之上的空间形成蚕茧凹槽;所述链条输送链的上方设有蚕茧图像采集器。
5.上述技术方案中,更为具体的方案可以是:所述推杆的横截面为底部水平的三角形。
6.进一步的:所述推杆的横截面为底部水平的正三角形。
7.进一步的:所述蚕茧图像采集器为相机。
8.进一步的:所述推杆表面亚光。
9.进一步的:所述皮带驱动动力机为用于驱动所述皮带输送带正反往复输送的伺服电机;所述链条驱动动力机为用于驱动所述链条输送链正向输送的伺服电机;所述推杆之间的蚕茧凹槽的宽度大于一个蚕茧的最大直径且小于两个蚕茧的最大直径。
10.由于采用了上述技术方案,本实用新型与现有技术相比具有如下有益效果:
11.1、本旋转蚕茧装置通过链条驱动动力机驱动链条输送链正向非匀速输送,皮带驱动动力机驱动皮带输送带正反往复运动,堆在推杆上的蚕茧在推杆两侧呈锐角及非均速输送冲击力和皮带输送带正反往复的摩擦力的作用下,破坏蚕茧的稳态,蚕茧的轴心运动速度和蚕茧底部运动速度之差形成对蚕茧的离心力,使蚕茧自动散开,落入排列在两根推杆
之间的蚕茧凹槽中,以蚕茧轴心为轴向与皮带输送带正反往复同步正反往复旋转,实现差速离心旋转蚕茧,再通过蚕茧图像采集器对每个蚕茧的所有表面的完整信息进行采集,解决了蚕茧相互黏连难以分离和蚕茧不能自动旋转造成的对蚕茧表面信息收集不完全,不能准确可靠地检测蚕茧质量的问题;
12.2、本旋转蚕茧装置采用的推杆,两侧横截面呈锐角,使蚕茧轻松地落入两根推杆间形成的蚕茧凹槽中,上小下大的推杆的两斜边,可以将蚕茧托起,很好地保证蚕茧旋转前进时不发生被推杆底部夹紧不能旋转的现象;两推杆间蚕茧凹槽的宽度大于一个蚕茧的最大直径且小于两个蚕茧的最大直径,保证蚕茧可与底部皮带输送带接触,同时避免两个及以上蚕茧并列落入凹槽;推杆表面亚光,可以不反射光线,避免了其他反光设备对相机采集蚕茧表面光线信息的干扰。
附图说明
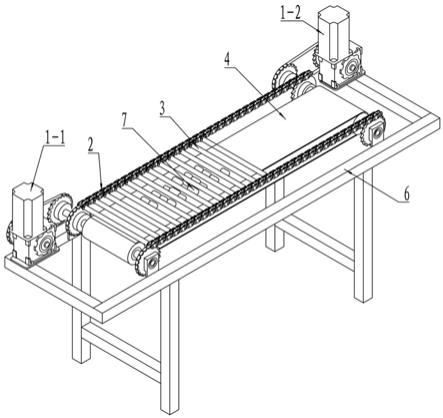
13.图1是本实用新型实施例的结构示意图;
14.图2是实用新型实施例的主视图;
15.图3是图2中a
‑
a的剖视图。
具体实施方式
16.下面结合附图对本实用新型实施例作进一步详述:
17.如图1、图2、图3所示的蚕茧旋转装置,包括水平的平台6,平台6上设有皮带驱动动力机1
‑
2驱动的皮带输送带4,皮带输送带4的上方设有链条驱动动力机1
‑
1驱动的链条输送链2,皮带驱动动力机1
‑
2为用于驱动皮带输送带正反往复输送的伺服电机;链条驱动动力机1
‑
1为用于驱动链条输送链正向均速输送的伺服电机;链条输送链2的链条间并排设置有多根横跨皮带输送带4的推杆3,推杆3间及皮带输送带4之上的空间形成蚕茧凹槽,蚕茧呈长椭圆形、椭圆束腰形、球形或纺锤形等不同形状,最大直径处的直径17~21mm,其周长53~66mm,两推杆间蚕茧凹槽的宽度大于一个蚕茧的最大直径且小于两个蚕茧的最大直径,保证蚕茧可与底部皮带输送带接触,同时避免两个及以上蚕茧并列落入凹槽。
18.推杆3的横截面为底部水平的三角形,三角形的推杆,在水平的底部推蚕茧7时,上小下大的推杆3的两斜边,可以很好地保证蚕茧7旋转前进时不发生被推杆3底部夹紧不能旋转的现象;这里的推杆3的横截面为底部水平的正三角形,为蚕茧7分离、旋转又不被夹茧的最佳形状。在其他实施例中,推杆3的横截面还可以是等腰梯形或顶部为圆弧形等等,推杆两侧的横截面呈锐角的各种形状。
19.链条输送链2的上方设有蚕茧图像采集器,这里的蚕茧图像采集器为相机5,推杆3表面亚光,可以不反射光线,避免了其他反光设备对相机5采集蚕茧表面光线信息的干扰。
20.旋转过程包括:链条驱动动力机1
‑
1驱动链条输送链2正向周期性地启动匀速运行、停止,皮带驱动动力机1
‑
2驱动皮带输送带4正反往复运动,使推杆3上的蚕茧在推杆两侧呈锐角及非均速输送冲击力和皮带输送带正反往复的摩擦力的作用下,自动散开,落入排列在两根推杆3之间的蚕茧凹槽中,以蚕茧7轴心为轴向与皮带输送带4正反往复同步正反往复旋转,同时通过相机5对每个蚕茧7的所有表面的完整信息进行采集。
21.其中,每次皮带输送带4正反往复运动的长度小于一个蚕茧的最大直径处的周长,
这里每次皮带输送带4正反往复运动的长度是40mm,避免蚕茧一次正向或反向旋转正好360
°
又回到原处,蚕茧图像采集器采集到相同的信息,并且蚕茧一次旋转完一周,速度过快,影响蚕茧图像采集器的分辨、拍照质量;皮带输送带4往复运动的频次控制在链条输送链2输送蚕茧运行长度在蚕茧图像采集器有效拍摄范围内,这里的蚕茧图像采集器是相机5,有效拍摄范围的长度为700mm,皮带输送带4正反往复运动17次,链条输送链2输送蚕茧运行长度在700mm内,蚕茧正向旋转17次,反向旋转17次,以确保蚕茧最大直径处旋转大于一周。
22.本旋转蚕茧方法通过链条驱动动力机1
‑
2驱动链条输送链2正向非匀速输送,皮带驱动动力机1
‑
1驱动皮带输送带4正反往复运动,堆在推杆3上的蚕茧7在推杆两侧呈锐角及非均速输送冲击力和皮带输送带正反往复的摩擦力的作用下,破坏蚕茧的稳态,蚕茧7的轴心运动速度和蚕茧底部运动速度之差形成对蚕茧的离心力,使蚕茧自动散开,落入排列在两根推杆3之间的蚕茧凹槽中,以蚕茧轴心为轴向与皮带输送带正反往复同步正反往复旋转,实现差速离心旋转蚕茧,再通过蚕茧图像采集器对每个蚕茧7的所有表面的完整信息进行采集,解决了蚕茧相互黏连难以分离和蚕茧不能自动旋转造成的对蚕茧表面信息收集不完全,不能准确可靠地检测蚕茧质量的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1