一种果蝇诱捕器的制作方法
1.本发明涉及果蝇诱捕器的技术领域,具体涉及一种果蝇诱捕器。
背景技术:
2.果蝇是一种全球性害虫。该害虫可以对成熟或亚成熟的健康果实进行危害,因为其雌成虫的产卵器外形较大、坚硬锋利且呈锯齿状,可刺破果皮产卵于果实内部,幼虫在果实内部取食造成危害,使被害果实迅速开始腐烂,并且会引发真菌、细菌等病害,造成二次侵染,导致水果产量下降,品质变劣,安全性和商品价值都受到严重的影响。
3.申请号为cn201620383686.1的专利公布了一种蓝莓园用果蝇诱捕装置,但是该装置在使用时,存在以下问题:
4.诱捕液散发出的气味是通过圆型通孔传播的,但是为了挡掉苍蝇及其它体型较大的昆虫进入诱捕装置,圆型通孔设置的很小,这就造成了诱捕液的气味扩散不佳,影响对果蝇的招引。
技术实现要素:
5.针对现有技术存在的不足,本发明的目的在于提供一种果蝇诱捕器来解决上述问题。
6.一种果蝇诱捕器,包括壳体,壳体上开设有喇叭形开口,喇叭形开口的侧壁上均匀开设有若干散味通槽,散味通槽沿喇叭形开口的内口方向收缩,并延伸入所述内口。
7.所述喇叭形开口的内口的直径小于喇叭形开口的外口的直径。
8.所述壳体包括上壳体和下壳体,上壳体与下壳体卡合连接,下壳体用来存储诱捕液。
9.所述内口通过防逃脱机构与壳体的内腔相连通。
10.所述防逃脱机构的出口处设置有封闭板,封闭板受驱动沿远离防逃脱机构的出口方向转动,直至相邻的封闭板移动至防逃脱机构的出口处。
11.还包括转轴,转轴周面上等距设置有所述封闭板,所述封闭板远离转轴的一端,均布有减阻弯板,相邻减阻弯板间形成导流槽。
12.所述转轴通过单向轴承转动安装在防逃脱机构内,所述封闭板采用轻质复合材料。
13.所述转轴一端与分度电机的输出端同轴固定连接,所述分度电机电连接有控制器,所述控制器电连接信号传送机构。
14.所述信号传送机构为红外接近传感器,红外接近传感器设置在防逃脱机构的侧壁上。
15.所述信号传送机构为重力传感器,所述重力传感器安装在封闭板上,重力传感器的上方覆盖有压力传导板。
16.与现有技术相比,本发明设备的有益效果是:
17.一、本发明设备,采用外口大内口小的喇叭形开口,方便果蝇进入,喇叭形开口的侧壁上均布有散味通槽,诱捕液可以经散味通槽从壳体内腔中扩散出,并通过喇叭形开口的外口扩散到空气中;诱捕液扩散效果较佳,有利于对果蝇的招引。
18.二、本发明设备,喇叭形开口通过防逃脱机构与壳体的内腔相连通,当果蝇进入到防逃脱机构中,封闭板受驱动沿远离防逃脱机构的出口方向转动,将封闭板上的果蝇带入壳体内腔,相邻的封闭板移动至防逃脱机构的出口处,对防逃脱机构的出口进行封堵,可以防止果蝇逃离壳体。
附图说明
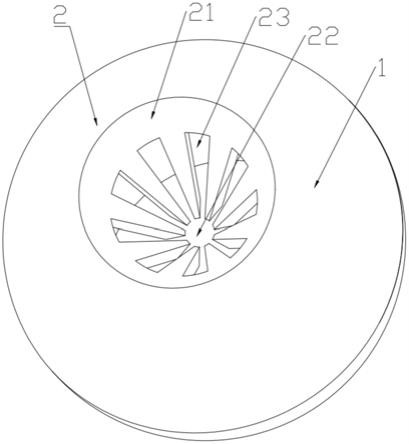
19.图1为一种果蝇诱捕器喇叭形开口的结构示意图。
20.图2为果蝇诱捕器内部的气体流向示意图。
21.图3为上壳体与下壳体卡合后的示意图。
22.图4为图3的爆炸图。
23.图5为转轴加装单向轴承的结构示意图。
24.图6为防逃脱机构加装分度电机的结构示意图。
25.图7为防逃脱机构加装红外接近传感器的结构示意图。
26.图8为重力传感器和封闭板的位置示意图。
27.图9为压力传导板和封闭板的位置示意图。
28.附图中:壳体1、上壳体11、下壳体12、喇叭形开口2、外口21、内口22、散味通槽23、封闭板3、转轴41、减阻弯板42、导流槽43、单向轴承46、分度电机44、红外接近传感器45、重力传感器47、压力传导板48、电机支撑架5、防逃脱机构6。
具体实施方式
29.面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
31.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
32.实施方式一
33.请参照图1,一种果蝇诱捕器,包括壳体1,本实施方式中,通过实验发现,不同形状的诱捕器对果蝇的吸引程度也不同,最优的外形为苹果形,所以本设备的壳体1采用苹果形
外壳,并且苹果形外壳表面涂有对果蝇招引效果较佳的红色和绿色涂层。
34.壳体1上开设有喇叭形开口2,喇叭形开口2的侧壁上均匀开设有若干散味通槽23,散味通槽23沿喇叭形开口2的内口22方向收缩,并延伸入所述内口 22;
35.请参照图1和图2,内口22作为果蝇入口使用外,和散味通槽23一并都能起到将诱捕液扩散到壳体1外的作用,诱捕液气化后,流动到内口22处,延伸入内口22的散味通槽23对内口22起到分切引流作用,气化的诱捕液从内口22 均匀的沿散味通槽23扩散,最后通过喇叭形开口2的外口21扩散大空气中,该设计使喇叭形开口2成为一条气体的快速扩散流道;
36.需要说明的是,散味通槽23的宽度无法使果蝇从散味通槽23飞出,只有喇叭形开口2的内口22和外口21为符合果蝇进入的宽度。
37.具体的,所述喇叭形开口2的内口22的直径小于喇叭形开口2的外口21 的直径,即本实施方式中,从外部看,喇叭形开口2从外至内缩小较大的开口,利于果蝇进入,而陡峭的喇叭形开口2,更易使果蝇跌落入壳体1内部;从内部看,喇叭形开口2从内至外扩大,利于诱捕液气化扩散。
38.请参照图3,具体的,本实施方式中,所述壳体1包括上壳体11和下壳体 12,喇叭形开口2设置在上壳体11上,下壳体12用来存储诱捕液,上壳体11 与下壳体12卡合连接,方便拆卸安装,对壳体1内部进行清洗。
39.需要说明的是,下壳体12内安装有与下壳体12内壁形状相适配的储液容器,诱捕液安放在储液容器内;
40.另外,本实施方式可以采用下壳体12底面设计成小开口结构,储液容器的入液端与下壳体12底面卡接。
41.实施方式二
42.本实施方式与实施方式一的区别在于:
43.请参照图1和图4,所述内口22通过防逃脱机构6与壳体1的内腔相连通;该设计的目的在于,考虑到喇叭形开口2的内口虽然较窄,但是还是有少部分果蝇从内口22逃出,所以本实施方式中,还设计了防逃脱机构6。
44.具体的,所述防逃脱机构6的出口处设置有封闭板3,封闭板3受驱动沿远离防逃脱机构6的出口方向转动,直至相邻的封闭板3移动至防逃脱机构6的出口处,即封闭板3沿远离防逃脱机构6的出口方向转动时,果蝇在自重的作用下,掉落入壳体1的内腔,而相邻的封闭板3同步移动到防逃脱机构6的出口处,对防逃脱机构6进行封堵,再次有果蝇落到封闭板3上时,重复上述流程。
45.请参照图4和图5,具体的,还包括转轴41,转轴41周面上等距设置有所述封闭板3,所述封闭板3远离转轴41的一端,均布有减阻弯板42,相邻减阻弯板42间形成导流槽43;
46.减阻弯板42的弯转方向与转轴41的转动方向相反,该设计可以减少封闭板3转动时产生的风阻,导流槽43的设计,使不管减阻弯板42在旋转状态还是静止状态,气化后的诱捕液都可以透过封闭板3,扩散到防逃脱机构6的内口 22处。
47.请参照图4和图5,具体的,所述转轴41通过单向轴承46转动安装在防逃脱机构6内,单向轴承46内部通过卡条限制棘轮反转,从而实现轴承的单向转动,由于单向轴承46为现有技术,故不在此详细描述,所述封闭板3采用轻质复合材料,本实施方式中,采用超轻质
炭/酚醛烧蚀复合材料,即果蝇落在封闭板3上时,封闭板3受到来自果蝇重量的压力,通过单向轴承46发生转动,封闭板3转动的过程中,果蝇不在受到封闭板3的承载,掉落到壳体1的内腔中,相邻的封闭板3移动到逃脱机构的出口处,防止果蝇飞逃。
48.实施方式三
49.本实施方式与实施方式二的区别在于:
50.请参照图5,图6和图7,所述转轴41一端与分度电机44的输出端同轴固定连接,所述分度电机44电连接有控制器,所述控制器电连接信号传送机构;
51.该设计的目的在于,若单单通过果蝇的自重,带动封闭板3转动,由于每只果蝇的体重都不同,所以单向转轴46转动的角度也不同,所以相邻的封闭板 3的周身不一定能全部移动到防逃脱机构6的出口处,那么有些体积较小的果蝇,可能会飞逃,所以本实施方式中,采用分度电机44控制转轴41转动,每次转动的角度相同,使相邻的封闭板能够全部移动到防逃脱机构6的出口处,防止果蝇飞逃。
52.请参图6和照图7,具体的,所述信号传送机构为红外接近传感器45,红外接近传感器45设置在防逃脱机构6的侧壁上,分度电机44和供电池通过电机支撑架5安装在防逃脱机构6外壁上,红外接近传感器45的主要器件为热释电红外传感器,生物有一定的体温,所以会发出特定波长的红外线,热释电红外传感器的红外感应源采用热释电红外传感器,这种元件在接收到生物红外辐射温度发生变化时就会失去电荷平衡,向外释放电荷,后续电路经检测处理后就能触发开关动作;
53.即果蝇进入红外接近传感器45的范围内时,红外接近传感器45感应到果蝇散发出的热量,将信号传递给控制器,控制器控制分度电机44带动转轴41 转动,进而带动转轴41上的封闭板3移动。
54.实施方式四
55.本实施方式与实施方式三的区别在于:
56.图8和图9,所述信号传送机构为重力传感器47,所述重力传感器47安装在封闭板3上,重力传感器47的上方覆盖有压力传导板48;
57.请参照图5,图8和图9,该设计的目的在于,若单单通过果蝇的自重,带动封闭板3转动,由于每只果蝇的体重都不同,所以单向转轴46转动的角度也不同,所以相邻的封闭板3的周身不一定能全部移动到防逃脱机构6的出口处,那么有些体积较小的果蝇,可能会飞逃,所以本实施方式中,采用分度电机44 控制转轴41转动,每次转动的角度相同,使相邻的封闭板能够全部移动到防逃脱机构6的出口处,防止果蝇飞逃,通过重力传感器47向分度电机44传递开启或关闭的信号;
58.当果蝇落在压力传导板48上时,压力传导板48将压力传递给重力传感器47,重力传感器47感应到压力的变化,将信号传递给控制器,控制器控制分度电机44转动,进而带动转轴41上的封闭板3移动。
59.工作原理。
60.使用前,先打开外壳1,在下壳体12中放入诱捕液,然后卡合好上壳体11,将本设备放在果蝇经常出没的地方;
61.此时,诱捕液气化后,流动到内口22处,延伸入内口22的散味通槽23对内口22起到分切引流作用,气化的诱捕液从内口22均匀的沿散味通槽23扩散,最后通过喇叭形开口2的
外口21扩散大空气中,喇叭形开口2成为诱捕液气化后的快速扩散流道;
62.当有果蝇飞过时,被苹果形的外观外壳1和气化的诱捕液所吸引,陡峭的喇叭形开口2,更易使果蝇跌落入壳体1内腔,当果蝇飞入或者跌入壳体1内腔时,由于内口22通过防逃脱机构6与壳体1的内腔相连通,所以果蝇先进入到防逃脱机构6内,封闭板3受驱动沿远离防逃脱机构6的出口方向转动,直至相邻的封闭板3移动至防逃脱机构6的出口处,即封闭板3沿远离防逃脱机构6 的出口方向转动时,果蝇在自重的作用下,掉落入壳体1的内腔,而相邻的封闭板3同步移动到防逃脱机构6的出口处,对防逃脱机构6进行封堵,再次有果蝇落到封闭板3上时,重复上述流程,通过防逃脱机构6防止果蝇从本设备中逃离。
63.上述说明是针对本发明较佳可行实施例的详细说明,但实施例并非用以限定本发明的专利申请范围,凡本发明所提示的技术精神下所完成的同等变化或修饰变更,均应属于本发明所涵盖专利范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1