一种穴盘苗取苗终端机械结构的制作方法
1.本实用新型涉及嫁接装置技术领域,特别是涉及一种穴盘苗取苗终端机械结构。
背景技术:
2.目前的嫁接终端上苗装置都是针对固定间隔播种的穴盘苗。固定间隔播种的穴盘苗依靠盘穴之间的间隔作为分隔,减少了穴苗间营养争夺,使得穴苗根系发育充分,也正因为有盘穴间的固定间隔,较为容易实现对固定间隔播种穴盘苗的自动上苗。
3.但是对于众多接穗苗的育苗而言,如西瓜等葫芦科作物的接穗苗,因嫁接时只需要其苗径上部,不需要其根部,通常采用高密度的撒播方式培植,既可以大大提高农业设施的利用率,降低能耗,也可以方便育苗基地节约化管理。
4.针对高密度撒播方式培植的穴盘苗,现有的自动上苗装置面临极其严峻的挑战。一是撒播方式培植的接穗苗无固定位置区间而言,也就是说不知道苗在什么位置;二是高密度培植下接穗苗之间的间隔较窄且不固定,不能依靠张大夹口来实现夹取。目前还没有可用的自动上苗装置实现对高密度撒播接穗苗的上苗作业,都是采用人工剪苗及上苗,采取人工作业的方式难以提升作业效率,极大地影响了自动嫁接作业的发展。
技术实现要素:
5.本实用新型的目的是提供一种穴盘苗取苗终端机械结构,以解决高密度撒播方式培植接穗苗的自动上苗问题,为农业嫁接机器人的全自动发展提供了技术方案。
6.本实用新型的技术方案是:
7.一种穴盘苗取苗终端机械结构,其特征在于:该终端机械结构包括机架、设有刀片的夹爪、驱动器、传递驱动器动力带动夹爪运动的传动机构、光线投射器、图像采集器;所述图像采集器设置在机架的顶部,夹爪与光线投射器设置在机架的底部。
8.所述传动机构包括可绕竖直轴线转动地定位在机架上且互相啮合的一对齿轮,每个齿轮上固定一条夹爪的爪臂,爪臂的夹持面上设有弹性层。
9.所述刀片水平布置并且刀片的的刀刃凸出于爪臂夹持面一定的距离。
10.所述图像采集器倾斜布置;所述光线投射器水平布置。
11.所述光线投射器的中心线与图像采集器的中心线之间的夹角在0-85度。
12.所述驱动器为步进电机;所述图像采集器为微型摄像头;所述光线投射器为一字线发生器。
13.本实用新型的有益效果是:
14.本实用新型利用光线投射器在苗茎上形成一道光斑,图像采集器捕获光斑图像后通过分析光斑尺寸可得到穴盘苗与穴盘苗取苗终端的距离,穴盘苗取苗终端再进行移动并剪切夹住穴盘苗,这样就能解决高密度撒播方式培植接穗苗的自动上苗问题。
附图说明
15.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图做一简单地介绍,显而易见地,下面描述中的附图时本实用新型的一些实施例,对于本领域普通技术员来讲,在不付出创造新劳动的前提下,还可以根据这些附图获得其他的附图。
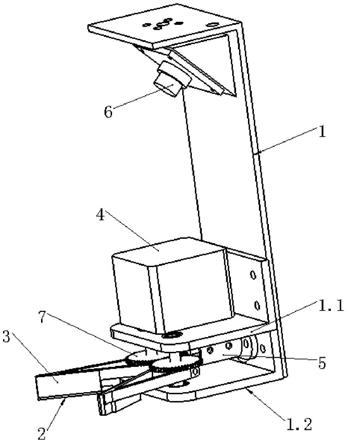
16.图1是本实用新型的立体结构示意图。
17.图2是本实用新型的主视结构示意图。
18.图3是本实用新型的右视结构示意图。
19.图4是本实用新型的工作范围示意图。
20.图5是本实用新型的工作示意图。
21.图6是本实用新型的拟合图之一。
22.图7是本实用新型的拟合图之二。
23.图8是本实用新型的拟合图之三。
24.图9是本实用新型的拟合图之四。
具体实施方式
25.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
26.一、如图1所示,本实用新型提供了一种穴盘苗取苗终端机械结构,包括:机架1、刀片2、夹爪3、驱动器4、传动机构、光线投射器5、图像采集器6。
27.所述机架的下部设有上下水平布置的上安装板1.1与下安装板1.2。所述图像采集器设置在机架的顶部,夹爪与光线投射器设置在机架的底部(上安装板与下安装板之间)。所述支架上留有足够孔位,用于连接外部的法兰联轴器,以便与上苗机械手末端相结合。
28.所述驱动器固定在上安装板的顶部。所述传动机构用于传递驱动器动力并且带动夹爪运动,传动机构设置在上安装板与下安装板之间。所述传动机构包括可绕竖直轴线转动地定位在机架上且互相啮合的一对齿轮7,每个齿轮上固定一条夹爪的爪臂。
29.所述每个夹爪的爪臂上设有一个刀片,刀片水平固定在爪臂的底部,刀片的刀刃凸出于爪臂的夹持面一定的距离(大于苗茎的外径)。所述爪臂的夹持面上设有弹性层(图中省略),防止夹持苗茎时对苗茎造成损伤。
30.所述光线投射器用于照射夹爪的正前方,光线投射器水平布置在齿轮的上方(并且略高于夹爪)。所述的光线投射器为一字线发生器。所述图像采集器倾斜布置并且面向光线投射器的照射方向,图像采集器的中心线与图像采集器的中心线之间存在一定的夹角,该夹角为0-85度。所述图像采集器为微型摄像头。
31.所述驱动器通过传动机构带动夹爪与刀片的开合,来实现对单颗幼苗的剪切夹持。所述驱动器为步进电机,步进电机的电机轴与其中一个齿轮的转轴同轴连接。
32.二、在穴盘苗取苗终端工作前,需要进行准备工作,包括以下步骤:
33.1、确定视觉检测范围
34.如图4所示,图像采集器的镜头与水平面夹角为θ,图像采集器的视角范围为2β,图像采集器中心点到光线投射器中心点的高度为h1,则有以下几何关系:
[0035][0036][0037]
根据上述关系,可求得d1与d2的值,d1与d2之间的距离表示光线投射器的激光束照射在被测目标苗茎上时,图像采集器可以捕获到此激光线条的物理范围。
[0038]
设图像采集器的视角为60度,h1=113.85mm,计算可得:d1=1308.62mm, d2=53.10mm,因此被采集的对象位置需在53.10mm到1308.62mm之间。
[0039]
除了对于工作距离有一定的要求之外,穴盘苗取苗终端对于工作的最佳范围也有一定的要求,此工作范围分别可从图像采集器的景深、光线投射器的可用光斑范围以及工作的垂直高度进行考虑分析,确定取苗终端的最佳范围。
[0040]
穴盘苗取苗终端机械结构所采用的图像采集器为树莓派可调焦摄像头,摄像头分辨率为640*480,景深为63mm到94mm之间,采用的一字型光线投射器在距离小于58mm和大于91mm时,照射在被测物体上的线条会明显加粗,从而会影响采集光斑轮廓的准确性。获取最佳范围距离时:从54mm到100mm范围内,每次移动2mm,摄像头采集一次图像,激光线条会在某一段范围内清晰呈现,标记出这段范围参数。经过测量和观察,当距离为64mm到90mm时,出现在图像中的激光线条最为清晰。
[0041]
为了使得穴盘苗取苗终端机械结构尽可能贴近穴盘面进行断根夹切,并且保证穴盘苗取苗终端尽不接触到穴盘面,设定穴盘苗取苗终端的工作高度为 3mm,即穴盘苗取苗终端的机架底部高于穴盘面3mm。因此整个穴盘苗取苗终端的水平工作范围是64mm到90mm,垂直工作高度为机架的底面高于穴盘面3mm处位置。
[0042]
2、调整视觉线
[0043]
穴盘苗取苗终端机械结构需要采用一字型光线投射器照射苗茎,利用图像采集器获取光斑,得到光斑最低点像素高度(图像中苗茎光斑的最低点像素在竖直方向上的长度),若左右光斑的高度不一致会影响穴盘苗取苗终端寻苗的目标对象,因此需要对光线投射器和图像采集器的水平度进行调整。
[0044]
在穴盘苗取苗终端机械结构装配时,图像采集器的安装孔位都是按照标准的尺寸图纸加工,固定部件使用设备自带的专有零件,因此可保证图像采集器的安装位置是水平的。
[0045]
光线投射器的调整方法如下(均为现有的调整方法):
[0046]
1)在工作距离范围内,首先利用图像采集器采集激光线条,经过上位机的 otsu图像分割方法,得到的二值图;
[0047]
2)提取二值图的中心骨架,再通过霍夫直线拟合,得到直线的斜率,求得倾斜角度;
[0048]
3)若倾斜角度在0.5度内,则可满足终端的工作的要求;否则再手动调整光线投射器的发射镜头,使之照射出水平激光。
[0049]
3、视觉深度标定
[0050]
由于穴盘苗取苗终端机械结构与穴盘苗在不同的距离时,图像采集器获取的苗茎光斑高度不同,因此需要通过标定获取距离与高度的关系,视觉深度标定过程如下:
[0051]
1)如图5所示,在工作范围内,每移动1mm采集一次图像,利用hsv颜色空间模型对目标图像进行处理(现有处理方法),获取图像中苗茎光斑像素点,提取光斑轮廓链,再对光斑轮廓链进行遍历,找出光斑轮廓链纵坐标最大像素点位置,标定出此点高度(该像素点在竖直方向上的长度),此光斑点所在的苗茎为目标幼苗;表1为实施例标定出的二十八组数据:
[0052]
表1标定数据
[0053][0054][0055]
2)获取足够多的距离与高度值后,通过曲线拟合得到距离与高度之间的关系,得到曲线拟合多项式(函数关系式);图6进行了4次曲线拟合,图7进行了5次曲线拟合,图8进行了6次曲线拟合,图9进行了7次曲线拟合;比较上述的拟合图发现,5次拟合时最接近散点图的变化规律,拟合后的函数关系式如下:
[0056]
y=p1*x5+p2*x4+p3*x3+p4*x2+p5*x+p6
[0057]
其中:x为图像中光斑最低点像素高度,y为距离,p为方程系数,具体值如下,
[0058]
p1=5.0919*10-11
,p2=-5.9735*10-8
,p3=2.4582*10-5
[0059]
p4=-0.0044169,p5=0.46939,p6=48.308
[0060]
根据上述函数关系,在获取到x的情况下,可求得取苗终端到穴盘苗苗茎的距离。
[0061]
三、本实用新型还提供一种使用穴盘苗取苗终端机械结构的寻苗方法,包括以下步骤:
[0062]
1、穴盘苗取苗终端机械结构向穴盘苗水平移动,当进入到工作范围内停止移动,步进电机控制夹爪打开(夹爪的张角α为3度),光线投射器水平照射穴盘苗并在穴盘苗苗茎上形成一道光斑,图像采集器捕光斑图像;
[0063]
2、计算穴盘苗取苗终端机械结构到穴盘苗的距离
[0064]
由于夹爪保持张开姿态,为了使夹爪能够夹切目标苗茎(设外径d为2mm),需要计算穴盘苗取苗终端机械结构继续移动的距离;
[0065]
利用hsv颜色空间模型对目标图像进行处理(现有处理方法),获取图像中苗茎光
斑像素点,提取光斑轮廓链,再对光斑轮廓链进行遍历,找出光斑轮廓链纵坐标最大像素点位置,标定出此点高度x(该像素点在竖直方向上的长度);将x代入公式
[0066]
y=p1*x5+p2*x4+p3*x3+p4*x2+p5*x+p6
[0067]
p1=5.0919*10-11
,p2=-5.9735*10-8
,p3=2.4582*10-5
[0068]
p4=-0.0044169,p5=0.46939,p6=48.308
[0069]
得到穴盘苗取苗终端机械结构到穴盘苗的距离y;
[0070]
3、夹切取苗
[0071]
计算穴盘苗取苗终端机械结构需要再次移动的水平距离d;d=(y
–
l* cos(α/2)+d),单位为mm,l为夹爪的水平长度,α为夹爪的爪臂张角,d 为苗茎的外径,这样就准确定位到要夹切的目标苗茎的位置;
[0072]
穴盘苗取苗终端机械结构根据计算结果d继续向穴盘苗水平移动,移动到位后夹爪闭合,完成对苗茎的剪切和夹持。
[0073]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1