套袋机的制作方法
1.本实用新型涉及园林果树的果实处理技术领域,特别是涉及一种套袋机。
背景技术:
2.水果套袋栽培是一种以保护果实为目的的栽培技术措施,能减少果实病虫害的发生、降低农药残留、提高果实商品价值的有效途径之一,近年来,大部分果农都选择套袋栽培技术。但套袋栽培需要幼果期尽早把每一个果子都套袋保护,每户果农面临着几万甚至几十万的果袋去套,传统人工套袋效率低,因此劳动量相当巨大。而市面上自动套袋设备虽技术上可以解决效率问题,但因结构复杂,售价昂贵,且是专机专用果袋,无法满足果农对果袋大小不一、价格不一的需求,且采用电、气传动,不适合果农长时间外出劳作的特殊环境,以及后续维护费用较高,因此果农对现有套袋技术并不认可。
技术实现要素:
3.基于此,有必要针对套袋效率低下、结构复杂、无法长期使用的问题,提供一种效率高、结构简单、可以长期使用的套袋机
4.一种套袋机,包括:盒袋模块,所述盒袋模块设有盒袋放置腔,所述盒袋放置腔用于放置果袋;张口模块,所述张口模块设置在所述盒袋模块一侧,所述张口模块用于将果袋撑开;所述封口钉模块设置在所述盒袋模块相对的两侧,所述封口钉模块用于将果袋缩口并用封口钉封口;所述控制把手模块分别与所述张口模块和/或所述封口钉模块连接;基于所述控制把手模块与所述张口模块,所述控制把手模块用于驱动所述张口模块将果袋撑开;基于所述控制把手模块与所述封口钉模块连接,所述控制把手模块用于驱动所述封口钉模块将果袋缩口并用封口钉封口。
5.本技术公开的套袋机通过将盒袋模块、张口模块封口钉模块和控制把手模块组合成套袋机实现了多种功能的集合,将果袋放置到盒袋模块后,通过控制把手模块可以驱动张口模块将果袋撑开,在将果袋撑开之后可以将果袋套设在需要套设的果子上,完成套设的同时,可以通过封口钉模块工作将果袋通过封口钉进行封口,整个操作过程简单可靠,通过各模块的配合实现了全部的套袋功能,可以加快套袋的效率,保证整个套袋过程一次性完成。
6.在其中一个实施例中,所述盒袋模块包括支撑壳体组件和第一导向杆,所述支撑壳体组件设有果袋容置槽,所述支撑壳体组件包括多块限位壳,所述多块限位壳之间至少部分通过所述第一导向杆连接,至少部分所述限位壳可以沿着所述第一导向杆滑动。通过设置多个限位壳,而限位壳之间至少部分通过第一导向杆进行连接,第一导向杆实现限位壳之间的相对位置调整时的导向。
7.在其中一个实施例中,还包括调节杆,至少部分所述多块限位壳之间通过所述调节杆连接,所述调节杆用于调节所述相邻的两块限位壳之间的间距。限位壳之间至少部分通过调节杆进行连接,通过调节杆进行相邻限位壳之间相对位置的调整,可以通过与导向
杆相互配合实现果袋容置槽的大小的调整,从而适应不同的果袋,实现了不同果袋的适配。
8.在其中一个实施例中,通过第一导向杆连接,可以是将第一导向杆设置在其中一个限位壳上,另一个上设置导向孔,第一导向杆插设到所述导向孔内。
9.在其中一个实施例中,所述支撑壳体组件包括第一限位壳、第二限位壳、第三限位壳、第四限位壳、第五限位壳和第六限位壳,所述第一限位壳和所述第二限位壳位于同一侧,所述第三限位壳和所述第四限位壳位于与所述第一限位壳和所述第二限位壳相对的另一侧,所述第一限位壳与所述第四限位壳相对设置,所述第二限位壳与所述第三限位壳相对设置,所述第五限位壳设置在所述第一限位壳和所述第二限位壳之间,所述第一限位壳和所述第二限位壳与所述第五限位壳之间通过所述第一导向杆和所述调节杆连接,所述第三限位壳和所述第四限位壳与所述第六限位壳之间通过所述第一导向杆连接。
10.在其中一个实施例中,还包括果袋支撑组件,所述果袋支撑组件设置在所述支撑壳体组件上且位于所述果袋容置槽内,所述果袋支撑组件可以相对所述支撑壳体组件移动,所述果袋支撑组件用于支撑果袋。通过设置果袋支撑组件可以实现对果袋的支撑,当将果袋放置在果袋容置槽时,果袋将放置到果袋支撑组件上,通过果袋支撑组件使果袋的最上层处于与果袋容置槽开口处方便对果袋的持续使用,保证工作的连续性。
11.在其中一个实施例中,所述果袋支撑组件包括果袋支撑板、导向杆和第一弹簧,所述果袋支撑板上设有所述导向杆,所述支撑壳体组件上设有活动孔,所述导向杆远离所述果袋支撑板的一端穿过所述活动孔,所述第一弹簧套设在所述导向杆上且位于所述果袋支撑板与所述支撑壳体组件之间。果袋支撑组件通过导向杆和第一弹簧的简单配合可以实现对果袋支撑板的导向,而通过第一弹簧对果袋支撑板的支撑可以对果袋进行顶推,使果袋能够处于工作面,对果袋进行后续处理时减少失效操作。
12.在其中一个实施例中,所述果袋支撑板包括第一支撑板、第二支撑板、第二导向杆和活动板,所述第一支撑板和所述第二支撑板之间设有所述活动板,所述第一支撑板和所述第二支撑板与所述活动板之间通过所述第二导向杆连接。通过第一支撑板、第二支撑板、第二导向杆和活动板的组合实现第一支撑板、第二支撑板之间的间距调整从而适应不同的果袋。
13.在其中一个实施例中,所述张口模块包括张口组件和第一安装支架,所述张口组件的数量为两个,所述两个张口组件设置在所述盒袋模块两侧,所述张口组件包括第一支撑架、第一导向件、刮片捏手、第一回弹件和第二牵引件,所述第一导向件设置在所述第一安装支架上,所述第一导向件的数量为多个,所述多个第一导向件设置在所述第一支撑架上,所述刮片捏手设置在所述第一支撑架上,所述第一回弹件设置在所述第一支撑架上,所述第二牵引件一端与所述控制把手模块连接,所述第二牵引件另一端与所述刮片捏手连接,所述第二牵引件至少部分设置在所述第一回弹件上,所述第二牵引件与所述控制把手模块连接。通过设置张口组件可以通过控制把手模块对第二牵引件施加力,第二牵引件经第一导向件的转向后对刮片捏手施加作用力,刮片捏手将对果袋进行作用进而打开果袋,而第二牵引件部分设置在第一回弹件上,当控制把手模块对第二牵引件施加力时,第一回弹件将被压缩,当控制把手模块的作用力取消时,第一回弹件将回弹回复初始状态。
14.在其中一个实施例中,还包括捏手模块,所述捏手模块用于将果袋缩口夹持,所述控制把手模块与所述捏手模块连接,所述控制把手模块用于驱动所述捏手模块将所述果袋
缩口夹持。
15.在其中一个实施例中,所述捏手模块设置在所述盒袋模块相对的两侧。
16.在其中一个实施例中,所述捏手模块包括捏手组件、第一牵引件和导向组件,所述捏手组件的数量为至少一个,所述第一牵引件的数量为至少一个,所述第一牵引件经由所述导向组件后与其中一个所述捏手组件连接,所述控制把手模块与所述第一牵引件连接,所述导向组件用于传导所述控制把手模块施加的力以驱动所述捏手组件夹持果袋。第一牵引件经多个导向组件与捏手组件连接,当控制把手模块对第一牵引件作用时,第一牵引件所受的力将传递到捏手组件,捏手组件将夹持果袋,实现果袋上下口脱离,动作过程简单。
17.在其中一个实施例中,所述捏手组件的数量为两个,所述两个捏手组件设置在所述盒袋模块两侧。
18.在其中一个实施例中,所述第一牵引件的数量为两个。
19.在其中一个实施例中,所述捏手组件包括捏手支架、第一捏手部、第二捏手部和第三回弹件,所述第一捏手部和所述第二捏手部设置在所述捏手支架上,所述第一捏手部和所述第二捏手部可以相对所述捏手支架转动,所述第一捏手部和所述第二捏手部至少部分可活动连接,所述第一捏手部可驱动所述第二捏手部转动,所述第一捏手部与所述第一牵引件连接,所述第一牵引件用于驱动所述第一捏手部旋转,所述第三回弹件的数量至少为一个;
20.基于所述第三回弹件的数量为一个,所述第三回弹件一端与所述第一捏手部或所述第二捏手部相抵,另一端与所述捏手支架相抵;
21.基于所述第三回弹件的数量为两个,其中一个所述第三回弹件一端与所述第一捏手部相抵,另一端与所述捏手支架相抵,另一个所述第三回弹件一端与所述第二捏手部相抵,另一端与所述捏手支架相抵。第一捏手部在受到第一牵引件的作用力后将在捏手支架上进行转动,当第一捏手部转动时将驱动第二捏手部进行转动从而实现两者的同步转动,第一捏手部和第二捏手部转动后可以加果袋进行夹持,而第三回弹件的设置可以在控制把手模块停止施加力后进行回弹复位。
22.可选地,所述第一捏手部和所述第二捏手部之间通过齿轮连接。
23.在其中一个实施例中,所述导向组件包括第二安装支架、安装座、支撑片和第二导向件,所述第二安装支架的数量为两个,所述两个第二安装支架设置在所述安装座两侧,所述支撑片的数量为两个,所述两个支撑片分别设置在所述两个第二安装支架上,所述第二导向件的数量为多个,所述第一牵引件的数量为两个,所述第一牵引件一端与所述支撑片连接,另一端经由所述多个第二导向件后与所述捏手组件连接。导向组件通过两个多个第二导向件的配合将两个第一牵引件分别引导到两个方向,通过两个第一牵引件分别牵引捏手组件从而实现对两侧的牵引捏手组件的控制,使两侧可以同时对果袋进行夹持。
24.在其中一个实施例中,所述封口钉模块包括封口钉组件、第二封口支架和滑动组件,所述封口钉组件和所述第二封口支架设置在所述盒袋模块两侧,所述封口钉组件和所述第二封口支架相对设置,所述滑动组件的数量为两个,所述封口钉组件设置在其中一个所述滑动组件上,所述封口钉组件可以在所述滑动组件移动,所述第二封口支架设置在另外一个所述滑动组件上,所述第二封口支架可在所述滑动组件移动,所述封口钉组件和所述第二封口支架相对运动时,所述第二封口支架可以作用于所述封口钉组件,所述封口钉
组件可以供应封口钉,所述控制把手模块分别与所述两个滑动组件连接,所述控制把手模块用于驱动所述两个滑动组件中的至少部分滑动。封口钉组件与第二封口支架在滑动组件上移动后可以相对运动,而封口钉组件和第二封口支架相互作用时,封口结构在第二封口支架的作用下通过封口钉将果袋口封住,整体结构简单,通过两侧部件的相互作用实现了封钉。
25.在其中一个实施例中,所述封口钉组件包括第一封口支架、封口钉盒、挤压滑块和弹性件,所述封口钉盒设置在所述第一封口支架上,所述封口钉盒设有封口钉容置腔,所述挤压滑块至少部分设置在所述封口钉容置腔内,所述挤压滑块可以在所述封口钉容置腔内滑动,所述弹性件一端与所述挤压滑块连接,另一端与所述第一封口支架连接。通过设置第一封口支架对封口钉盒进行固定,而挤压滑块可以在封口钉盒的封口钉容置腔内滑动,而弹性件一端挤压滑块连接,另一端与第一封口支架连接,通过弹性件可以对挤压滑块施加外力。
26.在其中一个实施例中,所述滑动组件包括定位块、滑动块、导向杆和第二回弹件,所述导向杆设置在所述定位块上,所述滑动块设置在所述导向杆上,所述滑动块可以在所述导向杆上滑动,所述第二回弹件设置在所述滑动块与所述定位块之间。
27.可选地,还包括第三导向件,所述弹性件经由所述第三导向件后与所述挤压滑块连接。
28.在其中一个实施例中,还包括脱袋模块,所述脱袋模块至少部分设置在所述盒袋模块两侧,所述控制把手模块与所述脱袋模块连接,所述控制把手模块用于驱动所述脱袋模块将果袋从所述盒袋模块脱离。
29.在其中一个实施例中,所述脱袋模块包括安装块、支撑板、第四导向件、脱袋组件和第五牵引件,所述第四导向件的数量为多个,所述第五牵引件一端与所述安装块连接,另一端经由所述多个第四导向件后与所述脱袋组件连接,所述脱袋组件设置在所述盒袋模块上,所述控制把手模块与所述第五牵引件连接。通过脱袋组件可以在第五牵引件的带动下进行运动,进而使果袋从盒袋模块上脱离,实现了果袋的一次性脱离。
30.在其中一个实施例中,所述脱袋组件包括脱袋杆、第三回弹件和限位件,所述限位件设置在所述支撑板上,所述脱袋杆设置在所述限位件和所述支撑板之间,所述第五牵引件与所述脱袋杆连接,所述第五牵引件用于驱动所述脱袋杆旋转,所述第三回弹件套设在所述脱袋杆上,所述第三回弹件一端与所述支撑板,另一端与所述脱袋杆相抵,所述脱袋杆至少部分弯折,所述脱袋杆旋转时,所述脱袋杆的弯折部可以摆动至所述盒袋模块所在的区域内。
31.在其中一个实施例中,还包括捏手模块和脱袋模块,所述控制把手模块包括第一控制组件、第二控制组件和第三控制组件,所述第一控制组件、所述第二控制组件和所述第三控制组件连接,所述第一控制组件与所述张口模块连接,所述第二控制组件分别与所述捏手模块和所述封口钉模块连接,所述第三控制组件与所述脱袋模块连接。通过将第一控制组件、第二控制装置和第三控制装置同时进行启动时进而同步带动张口模块、捏手模块、封口钉模块和脱袋模块同时进行动作,在各部件动作之后可以实现快速的套袋和封口。
32.在其中一个实施例中,所述第一控制组件包括第一扳机、第一绕线轮和第五导向件,所述第一扳机与所述第一绕线轮齿连接,所述第一扳机用于驱动所述第一绕线轮旋转,
所述张口模块的第二牵引件经由所述第五导向件后与所述第一绕线轮连接。
33.在其中一个实施例中,所述第二控制组件包括第二扳机、第二绕线轮、驱动杠杆、第三牵引件、第一牵引连接件和第六牵引件,所述第二扳机与所述第二绕线轮齿连接,所述第二扳机用于驱动所述第二绕线轮旋转,所述驱动杠杆设置在所述第二绕线轮上,所述第三牵引件一端与所述驱动杠杆连接,另一端与所述第一牵引连接件连接,所述第一牵引连接件用于与所述捏手模块连接,所述第六牵引件一端与所述第二绕线轮连接,另一端与所述封口钉模块连接。
34.在其中一个实施例中,所述第三控制组件包括第三绕线轮,第四牵引件和第二牵引连接件,所述第三绕线轮与所述第二控制组件连接,所述第四牵引件一端与所述第三绕线轮连接,另一端与所述第二牵引连接件连接,所述第二牵引连接件用于与所述脱袋模块连接。
35.第一扳机驱动第一绕线轮旋转时可以带动第二牵引件运动,进而实现,对张口模块的控制;第二扳机驱动第二绕线轮转动时驱动杠杆可以同时进行转动,从而可以通过第二绕线轮可以带动第六牵引件,而第六牵引件与封口钉模块连接,进而可以带动封口钉模块工作,驱动杠杆可以带动第六牵引件,而第一牵引件连接捏手模块,可以通过第一牵引件驱动捏手模块进行工作。
附图说明
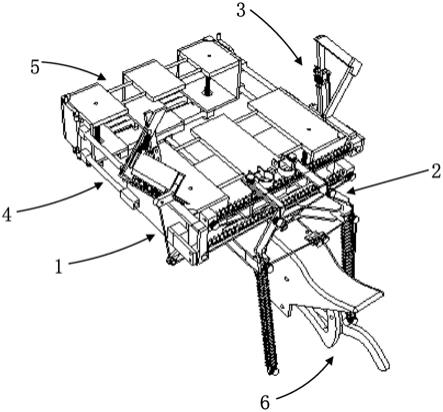
36.图1为套袋机的立体图;
37.图2为套袋机的左视图;
38.图3为支撑壳体组件的立体图;
39.图4为支撑壳体组件的爆炸图;
40.图5为果袋支撑组件的立体图;
41.图6为张口模块的立体图;
42.图7为张口模块的爆炸图;
43.图8为捏手模块的立体图;
44.图9为封口钉模块的立体图;
45.图10为封口钉组件的立体图;
46.图11为脱袋模块的立体图;
47.图12为控制把手模块的立体图;
48.图13为控制把手模块的爆炸图。
49.其中,附图标记与部件名称之间的对应关系为:
50.1盒袋模块,11支撑壳体组件,111第一限位壳,112第二限位壳,113第三限位壳,114第四限位壳,115第五限位壳,116第六限位壳,12第一导向杆, 13调节杆,14果袋容置槽,16果袋支撑组件,161果袋支撑板,1611第一支撑板,1612第二支撑板,1613第二导向杆,1614活动板,162导向杆,163第一弹簧;
51.2张口模块,21第一支撑架,22第一导向件,23刮片捏手,24第一回弹件, 25第一安装支架,26第二牵引件;
52.3捏手模块,31捏手组件,311捏手支架,312第一捏手部,313第二捏手部,314第三
回弹件,32第一牵引件,33导向组件,331第二安装支架,332安装座,333支撑片,334第二导向件,
53.4封口钉模块,41封口钉组件,411第一封口支架,412封口钉盒,413挤压滑块,414弹性件,415第三导向件,42第二封口支架,43滑动组件,431定位块,432滑动块,433第三导向杆,434第二回弹件;
54.5脱袋模块,51安装块,52支撑板,53第四导向件,54脱袋组件,541脱袋杆,542第三回弹件,543限位件,55第五牵引件;
55.6控制把手模块,61第一控制组件,611第一扳机,612第一绕线轮,613 第五导向件,62第二控制组件,621第二扳机,622第二绕线轮,623驱动杠杆, 624第三牵引件,625第一牵引连接件,626第六牵引件,63第三控制组件,631 第三绕线轮,632第四牵引件,633第二牵引连接件,64连接杆。
具体实施方式
56.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
57.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
58.下面参照附图描述本发明一些实施例所述套袋机。
59.如图1至图2所示,本实施例公开了一种套袋机,包括:盒袋模块1,盒袋模块1设有盒袋放置腔,盒袋放置腔用于放置果袋;张口模块2,张口模块2设置在盒袋模块1一侧,张口模块2用于将果袋撑开;封口钉模块4,封口钉模块 4设置在盒袋模块1相对的两侧,封口钉模块4用于将果袋用封口钉封口;控制把手模块6,控制把手模块6分别与张口模块2和/或封口钉模块4连接;基于控制把手模块6与张口模块2,控制把手模块6用于驱动张口模块2将果袋撑开;基于控制把手模块6与封口钉模块4连接,控制把手模块6用于驱动封口钉模块4将果袋用封口钉封口。
60.本技术公开的套袋机通过将盒袋模块1、张口模块2、封口钉模块4和控制把手模块6组合成套袋机实现了多种功能的集合,将果袋放置到盒袋模块1 后,通过控制把手模块6可以驱动张口模块2将果袋撑开,在将果袋撑开之后可以将果袋套设在需要套设的果子上,完成套设的同时封口钉模块4工作将果袋通过封口钉进行封口,整个操作过程简单可靠,通过各模块的配合实现了全部的套袋功能,可以加快套袋的效率,保证整个套袋过程一次性完成。
61.如图3和图4所示,除上述实施例的特征以外,本实施例进一步限定了:盒袋模块1包括支撑壳体组件11、第一导向杆12和调节杆13,支撑壳体组件 11设有果袋容置槽14,支撑壳体组件11包括多块限位壳,多块限位壳之间至少部分通过第一导向杆12连接,至少部分所述限位壳可以沿着所述第一导向杆滑动。通过设置多个限位壳,而限位壳之间至少部分通过第一导向杆进行连接,第一导向杆实现限位壳之间的相对位置调整时的导向。
62.如图3和图4所示,除上述实施例的特征以外,本实施例进一步限定了:还包括调节
杆13,至少部分多块限位壳之间通过调节杆13连接,调节杆13用于调节相邻的两块限位壳之间的间距。限位壳之间至少部分通过调节杆13进行连接,通过调节杆13进行相邻限位壳之间相对位置的调整,可以通过与导向杆相互配合实现果袋容置槽14的大小的调整,从而适应不同的果袋,实现了不同果袋的适配。
63.可选地,通过第一导向杆12连接,可以是将第一导向杆12设置在其中一个限位壳上,另一个上设置导向孔,第一导向杆12插设到导向孔内。
64.如图3和图4所示,除上述实施例的特征以外,本实施例进一步限定了:支撑壳体组件11包括第一限位壳111、第二限位壳112、第三限位壳113、第四限位壳114、第五限位壳115和第六限位壳116,第一限位壳111和第二限位壳 112位于同一侧,第三限位壳113和第四限位壳114位于与第一限位壳111和第二限位壳112相对的另一侧,第一限位壳111与第四限位壳114相对设置,第二限位壳112与第三限位壳113相对设置,第五限位壳115设置在第一限位壳 111和第二限位壳112之间,第一限位壳111和第二限位壳112与第五限位壳 115之间通过第一导向杆12和调节杆13连接,第三限位壳113和第四限位壳 114与第六限位壳116之间通过第一导向杆12连接。
65.如图5所示,除上述实施例的特征以外,本实施例进一步限定了:还包括果袋支撑组件16,果袋支撑组件16设置在支撑壳体组件11上且位于果袋容置槽14内,果袋支撑组件16可以相对支撑壳体组件11移动,果袋支撑组件16 用于支撑果袋。通过设置果袋支撑组件16可以实现对果袋的支撑,当将果袋放置在果袋容置槽14时,果袋将放置到果袋支撑组件16上,通过果袋支撑组件 16使果袋的最上层处于与果袋容置槽14开口处方便对果袋的持续使用,保证工作的连续性。
66.如图5所示,除上述实施例的特征以外,本实施例进一步限定了:果袋支撑组件16包括果袋支撑板161、导向杆162和第一弹簧163,果袋支撑板161 上设有导向杆162,支撑壳体组件11上设有活动孔15,导向杆162远离果袋支撑板161的一端穿过活动孔15,第一弹簧163套设在导向杆162上且位于果袋支撑板161与支撑壳体组件11之间。果袋支撑组件16通过导向杆162和第一弹簧163的简单配合可以实现对果袋支撑板161的导向,而通过第一弹簧163 对果袋支撑板161的支撑可以对果袋进行顶推,使果袋能够处于工作面,对果袋进行后续处理时减少失效操作。
67.如图5所示,除上述实施例的特征以外,本实施例进一步限定了:果袋支撑板161包括第一支撑板1611、第二支撑板1612、第二导向杆1613和活动板 1614,第一支撑板1611和第二支撑板1612之间设有活动板1614,第一支撑板 1611和第二支撑板1612与活动板1614之间通过第二导向杆1613连接。通过第一支撑板1611、第二支撑板1612、第二导向杆1613和活动板1614的组合实现第一支撑板1611、第二支撑板1612之间的间距调整从而适应不同的果袋。
68.如图6和图7所示,除上述实施例的特征以外,本实施例进一步限定了:张口模块2包括张口组件和第一安装支架25,张口组件的数量为两个,两个张口组件设置在盒袋模块1两侧,张口组件包括第一支撑架21、第一导向件22、刮片捏手23、第一回弹件24和第二牵引件26,第一导向件22设置在第一安装支架25上,第一导向件22的数量为多个,多个第一导向件22设置在第一支撑架21上,刮片捏手23设置在第一支撑架21上,第一回弹件24设置在第一支撑架21上,第二牵引件26一端与控制把手模块6连接,第二牵引件26另一端与刮片捏手
23连接,第二牵引件26至少部分设置在第一回弹件24上,第二牵引件26与控制把手模块6连接。通过设置张口组件可以通过控制把手模块6对第二牵引件26施加力,第二牵引件26经第一导向件22的转向后对刮片捏手23 施加作用力,刮片捏手23将对果袋进行作用进而打开果袋,而第二牵引件26 部分设置在第一回弹件24上,当控制把手模块6对第二牵引件26施加力时,第一回弹件24将被压缩,当控制把手模块6的作用力取消时,第一回弹件24 将回弹回复初始状态。
69.如图8所示,除上述实施例的特征以外,本实施例进一步限定了:还包括捏手模块3,所述捏手模块3用于将果袋缩口夹持,所述控制把手模块6与所述捏手模块3连接,所述控制把手模块6用于驱动所述捏手模块3将所述果袋缩口夹持。
70.如图8所示,捏手模块3设置在所述盒袋模块1相对的两侧。
71.如图8所示,除上述实施例的特征以外,本实施例进一步限定了:捏手模块3包括捏手组件31、第一牵引件32和导向组件33,捏手组件31的数量为至少一个,第一牵引件32的数量为至少一个,第一牵引件32经由导向组件33后与其中一个捏手组件31连接,控制把手模块6与两个第一牵引件32连接,导向组件33用于传导所述控制把手模块6施加的力以驱动捏手组件31夹持果袋。第一牵引件32经多个导向组件33与捏手组件31连接,当控制把手模块6对第一牵引件32作用时,第一牵引件32所受的力将传递到捏手组件31,捏手组件 31将夹持果袋,实现果袋上下口脱离,动作过程简单。
72.如图8所示,捏手组件31的数量为两个,两个捏手组件31设置在盒袋模块1两侧。
73.如图8所示,除上述实施例的特征以外,本实施例进一步限定了:捏手组件31包括捏手支架311、第一捏手部312、第二捏手部313和第三回弹件314,第一捏手部312和第二捏手部313设置在捏手支架311上,第一捏手部312和第二捏手部313可以相对捏手支架311转动,第一捏手部312和第二捏手部313 至少部分可活动连接,第一捏手部312可驱动第二捏手部313转动,第一捏手部312与第一牵引件32连接,第一牵引件32用于驱动第一捏手部312旋转,第三回弹件314的数量至少为一个;基于第三回弹件314的数量为一个,第三回弹件314一端与第一捏手部312或第二捏手部313相抵,另一端与捏手支架 311相抵;基于第三回弹件314的数量为两个,其中一个第三回弹件314一端与第一捏手部312相抵,另一端与捏手支架311相抵,另一个第三回弹件314一端与第二捏手部313相抵,另一端与捏手支架311相抵。第一捏手部312在受到第一牵引件32的作用力后将在捏手支架311上进行转动,当第一捏手部312 转动时将驱动第二捏手部313进行转动从而实现两者的同步转动,第一捏手部 312和第二捏手部313转动后可以加果袋进行夹持,而第三回弹件314的设置可以在控制把手模块6停止施加力后进行回弹复位。
74.可选地,第一捏手部312和第二捏手部313之间通过齿轮连接。
75.如图8所示,除上述实施例的特征以外,本实施例进一步限定了:导向组件33包括第二安装支架331、安装座332、支撑片333和第二导向件334,第二安装支架331的数量为两个,两个第二安装支架331设置在安装座332两侧,支撑片333的数量为两个,两个支撑片333分别设置在两个第二安装支架331 上,第二导向件334的数量为多个,第一牵引件32的数量为两个,第一牵引件 32一端与支撑片333连接,另一端经由多个第二导向件334后与捏手组件31连接。导向组件33通过两个多个第二导向件334的配合将两个第一牵引件32 分别引导到两个方向,通过两个第一牵引件32分别牵引捏手组件31从而实现对两侧的牵引捏手组件
31的控制,使两侧可以同时对果袋进行夹持。
76.如图9所示,除上述实施例的特征以外,本实施例进一步限定了:封口钉模块4包括封口钉组件41、第二封口支架42和滑动组件43,封口钉组件41和第二封口支架42设置在盒袋模块1两侧,封口钉组件41和第二封口支架42相对设置,滑动组件43的数量为两个,封口钉组件41设置在其中一个滑动组件 43上,封口钉组件41可以在滑动组件43移动,第二封口支架42设置在另外一个滑动组件43上,第二封口支架42可在滑动组件43移动,封口钉组件41和第二封口支架42相对运动时,第二封口支架42可以作用于封口钉组件41,封口钉组件41可以供应封口钉,控制把手模块6分别与两个滑动组件43连接,控制把手模块6用于驱动两个滑动组件43中的至少部分滑动。封口钉组件41 与第二封口支架42在滑动组件43上移动后可以相对运动,而封口钉组件41和第二封口支架42相互作用时,封口结构41在第二封口支架42的作用下通过封口钉将果袋口封住,整体结构简单,通过两侧部件的相互作用实现了封钉。
77.如图9和图10所示,除上述实施例的特征以外,本实施例进一步限定了:封口钉组件41包括第一封口支架411、封口钉盒412、挤压滑块413和弹性件 414,封口钉盒412设置在第一封口支架411上,封口钉盒412设有封口钉容置腔,挤压滑块413至少部分设置在封口钉容置腔内,挤压滑块413可以在封口钉容置腔内滑动,弹性件414一端与挤压滑块413连接,另一端与第一封口支架411连接。通过设置第一封口支架411对封口钉盒412进行固定,而挤压滑块413可以在封口钉盒412的封口钉容置腔内滑动,而弹性件414一端挤压滑块413连接,另一端与第一封口支架411连接,通过弹性件414可以对挤压滑块413施加外力。
78.如图9所示,除上述实施例的特征以外,本实施例进一步限定了:滑动组件43包括定位块431、滑动块432、导向杆433和第二回弹件434,导向杆433 设置在定位块431上,滑动块432设置在导向杆433上,滑动块432可以在导向杆433上滑动,第二回弹件434设置在滑动块432与定位块431之间。
79.可选地,还包括第三导向件415,弹性件414经由第三导向件415后与挤压滑块413连接。
80.如图11所示,除上述实施例的特征以外,本实施例进一步限定了:还包括脱袋模块5,所述脱袋模块5至少部分设置在所述盒袋模块1两侧,所述控制把手模块6与所述脱袋模块5连接,所述控制把手模块6用于驱动所述脱袋模块5 将果袋从所述盒袋模块1脱离。
81.如图11所示,除上述实施例的特征以外,本实施例进一步限定了:脱袋模块5包括安装块51、支撑板52、第四导向件53、脱袋组件54和第五牵引件55,第四导向件53的数量为多个,第五牵引件55一端与安装块51连接,另一端经由多个第四导向件53后与脱袋组件54连接,脱袋组件54设置在盒袋模块1上,控制把手模块6与第五牵引件55连接。通过脱袋组件54可以在第五牵引件55 的带动下进行运动,进而使果袋从盒袋模块1上脱离,实现了果袋的一次性脱离。
82.如图11所示,除上述实施例的特征以外,本实施例进一步限定了:脱袋组件54包括脱袋杆541、第三回弹件542和限位件543,限位件543设置在支撑板52上,脱袋杆541设置在限位件543和支撑板52之间,第五牵引件55与脱袋杆541连接,第五牵引件55用于驱动脱袋杆541旋转,第三回弹件542套设在脱袋杆541上,第三回弹件542一端与支撑板52,另一端与脱袋杆541相抵,脱袋杆541至少部分弯折,脱袋杆541旋转时,脱袋杆541的弯折部可以摆动
至盒袋模块1所在的区域内。
83.如图12和图13所示,除上述实施例的特征以外,本实施例进一步限定了:控制把手模块6包括第一控制组件61、第二控制组件62和第三控制组件63,第一控制组件61、第二控制组件62和第三控制组件63连接,第一控制组件61 与张口模块2连接,第二控制组件62分别与捏手模块3和封口钉模块4连接,第三控制组件63与脱袋模块5连接。通过将第一控制组件61、第二控制装置 62和第三控制装置63同时进行启动时进而同步带动张口模块2、捏手模块3、封口钉模块4和脱袋模块5同时进行动作,在各部件动作之后可以实现快速的套袋和封口。
84.如图12和图13所示,除上述实施例的特征以外,本实施例进一步限定了:第一控制组件61包括第一扳机611、第一绕线轮612和第五导向件613,第一扳机611与第一绕线轮612齿连接,第一扳机611用于驱动第一绕线轮612旋转,张口模块2的第二牵引件26经由第五导向件613后与第一绕线轮612连接;和/或
85.第二控制组件62包括第二扳机621、第二绕线轮622、驱动杠杆623、第三牵引件624、第一牵引连接件625和第六牵引件626,第二扳机621与第二绕线轮622齿连接,第二扳机621用于驱动第二绕线轮622旋转,驱动杠杆623设置在第二绕线轮622上,第三牵引件624一端与驱动杠杆623连接,另一端与第一牵引连接件625连接,第一牵引连接件625用于与捏手模块3连接,第六牵引件626一端与第二绕线轮622连接,另一端与封口钉模块4连接;和/或
86.第三控制组件63包括第三绕线轮631,第四牵引件632和第二牵引连接件 633,第三绕线轮631与第二控制组件62连接,第四牵引件632一端与第三绕线轮631连接,另一端与第二牵引连接件633连接,第二牵引连接件633用于与脱袋模块5连接。
87.第一扳机611驱动第一绕线轮621旋转时可以带动第二牵引件26运动,进而实现,对张口模块2的控制;第二扳机621驱动第二绕线轮622转动时驱动杠杆623可以同时进行转动,从而可以通过第二绕线轮622可以带动第六牵引件626,而第六牵引件626与封口钉模块4连接,进而可以带动封口钉模块工作,驱动杠杆623可以带动第六牵引件625,而第一牵引件625连接捏手模块3,可以通过第一牵引件625驱动捏手模块3进行工作。
88.可选地,第一牵引连接件625包括固定外壳和两个导向件,两个导向件设置在固定外壳上,两个导向件分别与两个第一牵引件32相抵。
89.可选地,第二牵引连接件633包括固定外壳和两个导向件,两个导向件设置在固定外壳上,两个导向件分别与两个第五牵引件55相抵。
90.可选地,第一控制组件61和第二控制组件62之间可以通过连接杆进行连接,第二控制组件62和第三控制组件63可以通过连接杆进行连接。
91.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
92.以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1