一种架空线路智能驱鸟机器人的制作方法
1.本实用新型属于电力防护设备技术领域,具体涉及一种架空线路智能驱鸟机器人。
背景技术:
2.随着我国电力行业的飞速发展,电网覆盖面积逐渐地扩大,同时随着人们对自然环境认识的提高,不断加强对水土环境的保护,因此鸟类的数量逐年增多,活动的范围也在逐渐扩大,不可避免地为架空输电线路造成了极大地危害,具体表现为:
①
鸟类在输电铁塔上筑“巢”时用的树枝、铁丝、棉线等等材料,极有可能下落导致短接瓷片,引起线路跳闸;
②
鸟类进食,其遗留物容易造成输电线路故障、跳闸;
③
鸟类排泄物污染瓷瓶,降低瓷瓶串外绝缘强度,从而引起输电线路故障。
3.上述危害统称为鸟害事故,经有关部门统计,鸟类活动对输电线路故障的影响仅次于雷击与外力破坏,鸟害越来越威胁着国家电网的正常运行并造成了严峻的局面,因此采取一定的措施减少鸟害故障成为当前的重要任务,然而现有的驱鸟设备,驱鸟的效果不佳,因此在实用时,具有较大的局限性,现有的驱鸟设备一般只能够在某一个方向上进行驱鸟,不能够进行全方位的智能驱鸟。
4.有鉴于此,本发明人提出一种架空线路智能驱鸟机器人,以克服现有技术的缺陷。
技术实现要素:
5.本实用新型的目的在于克服上述现有技术的缺点,提供一种架空线路智能驱鸟机器人,该驱鸟机器人采用正六棱锥体结构,每个棱面均设置有独立的探测单元和执行单元,能够实现360度全覆盖,且无需外接电源,通过探测单元探测到鸟类活动,然后通过执行单元对鸟类进行干扰和惊吓,达到驱鸟的效果。
6.本实用新型的目的是通过以下技术方案来解决的:
7.一种架空线路智能驱鸟机器人,包括安装基座,所述安装基座上部固定设置有壳体,所述壳体上安装有驱鸟机构;
8.其中,所述安装基座,用于与输电杆塔配合固定安装;
9.所述壳体为正棱锥体结构;
10.所述驱鸟机构包括电源单元、用于探测禽鸟的探测单元和发射驱鸟信号的执行单元以及微控制单元,所述电源单元、探测单元、执行单元均与微控制单元电性连接,所述电源单元分别为探测单元、执行单元和微控制单元供电;
11.所述壳体的每个棱面中部均安装有探测单元和执行单元。
12.进一步地,所述壳体为正六棱锥体结构。
13.进一步地,所述电源单元主要由太阳能电池板和蓄电池构成,所述蓄电池设置在壳体的腔室内,所述太阳能电池板安装在壳体的上方。
14.进一步地,所述蓄电池为锂电池。
15.进一步地,所述探测单元采用多普勒探测雷达。
16.进一步地,所述执行单元包括led警示灯和/或超声波驱鸟器。
17.进一步地,所述执行单元还包括驱鸟风,所述驱鸟风车包括安装在壳体内部的马达,所述马达的输出轴与主轴转轴连接,所述主轴的上部外侧等间距固定安装有若干组杆体,且每组杆体的末端均安装有反光镜;
18.所述马达与蓄电池电性连接。
19.进一步地,所述驱鸟机器人还包括通信单元,所述通信单元与微控制单元连接,用于将驱鸟机器人的地理位置信息、运行状态信息以及驱鸟记录信息发送至后台服务器端。
20.进一步地,所述通信单元包括4/5g芯片以及数据传输用天线,所述天线固定设置在太阳能电池板的背部顶端位置处。
21.进一步地,所述壳体上设置有总开关按钮,所述总开关按钮用于控制驱鸟机器人是否开启工作。
22.与现有技术相比,本实用新型的有益效果:
23.1、本实用新型一种架空线路智能驱鸟机器人,与现有技术相比,具有以下优点:一是本实用新型驱鸟机器人整体采用低高度的正六棱锥体结构,该结构不但能够减少风阻而且防雨、防冰、防紫外线,可以长期稳定安装在户外的输电杆塔上;二是在正六棱锥体的每个面均独立安装有多普勒探测雷达组成的探测单元以及发射驱鸟信号的执行单元,能够实现360度全覆盖,通过探测单元感知到鸟类活动后,执行单元对鸟类进行干扰和惊吓,达到驱鸟的效果,可以有效防止鸟类靠近保护区域和破坏电力设施;三是通过太阳能电池板对蓄电池进行持续充电,保证设备长效续航作业。
24.2、本实用新型一种架空线路智能驱鸟机器人,安装有由4/5g芯片以及数据传输用天线组成的通信单元,通信单元与微控制单元单元连接,一方面可以远程控制驱鸟机器人的启停,另一方面能够将驱鸟机器人所在的地理位置信息、运行状态信息(包括驱鸟机器人是否运行正常、太阳能电池板是否能够为蓄电池充电等)以及驱鸟记录信息 (包括驱鸟次数、时间等)发送至后台服务器端,后台服务可以对相关数据进行处理、分析,有助于带点作业人员掌握整个区域防鸟的信息,以便做出针对性部署。
附图说明
25.此处的附图被并入说明书中并构成本说明书的一部分,与说明书一起用于解释本实用新型的原理。
26.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
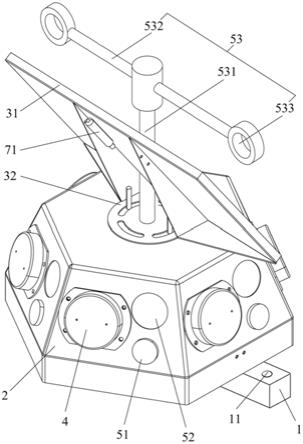
27.图1为本实用新型智能驱鸟机器人立体1结构示意图;
28.图2为本实用新型智能驱鸟机器人立体2结构示意图;
29.图3为本实用新型智能驱鸟机器人主视图;
30.图4为本实用新型微控制单元连接框图。
31.其中:1为安装基座;2为壳体;3为电源单元;4为探测单元; 5为执行单元;6为微控制单元;7为通信单元;8为总开关按钮;11 为安装通孔;31为太阳能电池板;32为旋转支架;
51为led警示灯;52为超声波驱鸟器;53为驱鸟风车;71为天线;531为主轴; 532为杆体;533为反光镜。
具体实施方式
32.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与所附权利要求书中所详述的、本实用新型的一些方面相一致的装置的例子。
33.为了使本领域的技术人员更好地理解本实用新型的技术方案,下面结合附图及实施例对本实用新型作进一步详细描述。
34.参见图1~4所示,本实用新型一种架空线路智能驱鸟机器人,包括安装基座1,安装基座1上部固定设置有壳体2,壳体2上安装有驱鸟机构,通过驱鸟机构可实现一定范围内的驱鸟动作,防止鸟类靠近保护区域破坏电力设施。
35.具体的,安装基座1上开设有用于与输电杆塔连接的安装通孔 11,以便通过螺栓组件穿过通孔11与输电杆塔快速连接固定。
36.壳体2为正棱锥体结构,优选如本实施例附图所示正六棱锥体结构,该壳体结构具有低高度、低风阻、防雨、防冰、防紫外线等优点,保证安装在输电杆塔高处后的稳定性,具体实施时,在壳体2的外表面涂覆有防腐层,用于延长壳体的使用寿命。
37.本实用新型驱鸟机构如图4所示,包括电源单元3、用于探测禽鸟的探测单元4和发射驱鸟信号的执行单元5以及微控制单元 (mcu)6;所述电源单元3、探测单元4、执行单元5均与微控制单元(mcu)6电性连接,电源单元3分别为探测单元4、执行单元 5和微控制单元(mcu)6供电。所述探测单元4用于探测当前范围 (范围由选用的雷达决定)内是否有鸟类信息,并将该信息发送给微控制单元6,微控制单元6当接收到有鸟类信息时,则启动执行单元 5进行驱鸟动作,反之,则不启动,本实用新型驱鸟机器人在未探测到鸟类信息时处于待机状态,以节省电力消耗;本实用新型正六棱锥体壳体2的每个棱面均独立安装有探测单元4和执行单元5,以便该驱鸟机器人能够探测每个面向的鸟类、并对其进行驱赶,且相邻面不会产生干扰,实现360度全覆盖。
38.其中,电源单元3主要由太阳能电池板31和蓄电池构成,蓄电池采用高容量锂电池,通过太阳能电池板31为蓄电池进行蓄电,蓄电池设置在壳体2的腔室内,太阳能电池板31安装在壳体2的上方,具体的,本实用新型的太阳能电池板31与水平面呈夹角设置,太阳能电池板31固定设置在旋转支架32上,旋转支架32可在壳体2的顶部任意旋转角度(旋转支架32底部通过轴承与壳体2顶部转轴活动连接),具体安装时,通过旋转支架32将太能电池板31调整到最佳的角度后进行固定,以便最大化利用太阳能电池板31将光能转换为电能。
39.本实用新型驱鸟机器人还包括通信单元7,所述通信单元7与微控制单元6连接,通信单元7包括4/5g芯片以及数据传输用天线71,天线71固定设置在太阳能电池板31的背部顶端位置处。通过通信单元7一方面可以远程遥控操控驱鸟机器人是否开启工作,另一方面用于将驱鸟机器人所在的地理位置信息、运行状态信息(包括驱鸟机器人是否运行正常、太阳能电池板是否能够为蓄电池充电等)以及驱鸟记录信息(包括驱鸟次数、时间等)发送至后台服务器端,后台服务可以对相关数据进行处理、分析,有助于带点作业人员掌握整个区
域防鸟的信息,以便做出针对性的部署。
40.本实用新型驱鸟机器人还包括设置在壳体2外部的总开关按钮8 以及控制探测单元4和执行单元5对应的分开关按钮,所述总开关按钮8用于控制驱鸟机器人是否开启工作,该总开关按钮8用于当维护人员对驱鸟机器人进行检修维护时,可以临时关闭或开启。
41.本实用新型探测单元4采用多普勒探测雷达。
42.本实用新型执行单元5包括led警示灯51和/或超声波驱鸟器 52,所述执行单元5通过微控制单元6控制,所述led警示灯51能够输出刺眼绿光、红光或白光,且每次输出时间相同或不同,所述超声波驱鸟器52能够输出频率不断变化的超声波,且每次输出时间相同或不同。
43.所述执行单元5还包括驱鸟风车53,所述驱鸟风车53包括安装在壳体2内部的马达(图中未显示),所述马达的输出轴与主轴531 转轴连接,当主轴531与太阳能面板31发生干涉时,可将主轴531 穿过太阳能面板31,或者采用多个小块太阳能面板31以避开主轴 531,所述主轴531的上部外侧等间距固定安装有若干组杆体532,如本实施例中附图1~2所示杆体532为两组,且每组杆体532的末端均安装有反光镜533;所述马达与蓄电池电性连接,通过马达驱动主轴531旋转,并且在杆体532的末端设置有反光镜533,具有反光的作用,进一步提高该驱鸟机器人驱鸟的效果,提高了实用性。所述执行单元5还可以包括声音驱鸟器等其它驱鸟方式,不再赘述。
44.本实用新型驱鸟机器人在向输电杆塔安装之前,要进行试验,试验方式为:指定场地内安装该驱鸟机器人,进行无人机测试,对驱鸟机器人的探测范围、探测距离及响应时间等进行测试,测试合格后,方可安装。
45.本实用新型驱鸟机器人的工作原理及过程为:太阳能电池板31 将光能转变成电能储存在蓄电池中,为驱鸟机器人提供稳定可靠的供电;安装基座3通过通孔与输电杆塔能够快速固定连接;驱鸟机构通过探测单元4探测到鸟类后,通过信号检测电路告知mcu(微控制单元)6,微控制单元6发出驱鸟指令,执行单元5(超声波驱鸟器+ 声音+led警示灯+驱鸟风车)进行驱鸟,完成驱鸟动作。
46.具体工作过程为:
47.1)驱鸟机器人工作分为两种情况:探测到鸟类以及遥控操控,其余待机时为静止状态。
48.2)驱鸟机器人接收到雷达探测器信号后驱鸟单元发出驱鸟指令,实现超声波、光感驱鸟的工作过程。
49.具体为,当探测单元(多普勒探测雷达)4探测到鸟类靠近驱鸟机器人时,微控制单元6控制执行单元5发出驱鸟信号,具体通过超声波驱鸟器52发出超声波刺激鸟类的神经系统,同时声音驱鸟器模拟老鹰声源等方式吓阻鸟类靠近输电杆塔,另外也通过马达驱动驱鸟风车53旋转驱鸟鸟类,在夜晚有飞鸟靠近的情况下,根据鸟类惧怕闪光的习性,启用led警示灯51频闪强光刺激鸟类的视觉系统,破坏鸟类的生存环境,从而在鸟类未落杆之前将其驱离,防止其靠近防御区域,以达到杜绝鸟害,保证电力设施安全稳定运行。
50.3)驱鸟机器人工作一定时间后将驱鸟信息传输至后台服务器端,并可以在后台对驱鸟机器人下发指令,以检查设备是否存在故障等问题。
51.具体的,4/5g芯片通过数据传输用天线71将驱鸟机器人所在的地理位置信息、运
行状态信息(包括驱鸟机器人是否运行正常、太阳能电池板是否能够为蓄电池充电等)以及驱鸟记录信息(包括驱鸟次数、时间等)发送至后台服务器端,便于工作人员查看当前运行情况以及后续对这些数据信息进行分析和处理,当然后台可对驱鸟机器人下发指令,以检查驱鸟机器人是否存在故障等问题。
52.以上所述仅是本实用新型的具体实施方式,使本领域技术人员能够理解或实现本实用新型。对这些实施例的多种修改对本领域的技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。
53.应当理解的是,本实用新型并不局限于上述已经描述的内容,并且可以在不脱离其范围进行各种修改和改变。本实用新型的范围仅由所附的权利要求来限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1