固定式仿真隼的制作方法
1.本实用新型涉及驱鸟设备的技术领域,特别是涉及一种固定式仿真隼。
背景技术:
2.固定式仿真隼是用于驱散鸟群的辅助装置,其在驱鸟设备的领域中得到了广泛的使用;现有的固定式仿真隼通过高逼真模拟隼类的叫声及动作驱散鸟群,但长时间暴露在外界环境下,容易被暴晒和被雨水冲湿损坏,导致装置的使用寿命较低,同时不便于调节仿真隼的高度,难以对不同高度的鸟类进行有效驱散,导致装置的使用局限性较差。
技术实现要素:
3.为解决上述技术问题,本实用新型提供一种既避免了仿真隼主体长时间暴露在外界环境中,避免了被暴晒和被雨水冲湿,提高装置的使用寿命,同时便于对仿真隼主体进行高度的调节,便于驱散不同高度的鸟群,降低其使用局限性,设备全天24小时工作,可全天候在户外安全工作和使用,防风防雨防腐蚀的固定式仿真隼。
4.本实用新型的固定式仿真隼,包括底座、第一电机、第一主动锥齿轮、第一从动锥齿轮、螺管、螺杆、支撑固定架、升降板、转动装置、转动板、多组第一收缩杆、多组弹簧、安装板、纵向立杆、仿真隼主体、两组固定块、两组滚轮、两组防护板、两组固定支承杆、两组第二收缩杆和两组压簧,第一电机固定在底座的顶端,第一电机的输出端与第一主动锥齿轮连接,第一主动锥齿轮与第一从动锥齿轮啮合传动连接,并且第一从动锥齿轮固定在螺管上,螺管与底座转动连接,螺杆与螺管螺装连接,并且螺杆的顶部从支撑固定架的中部穿过,并与升降板的底端连接,支撑固定架固定在底座上,并且转动板通过转动装置与升降板连接,多组第一收缩杆均匀固定在转动板的顶端,弹簧固定套装在第一收缩杆上,并且安装板固定在第一收缩杆的顶端,仿真隼主体通过纵向立杆固定在安装板的顶端,两组固定块分别固定在转动板顶端的左右两侧,两组滚轮分别与两组固定块的上部转动连接,并分别与两组防护板的内侧端滚动接触,并且两组固定支承杆分别与两组防护板的内侧端中部铰接,并分别固定在支撑固定架顶端的左右两侧,两组第二收缩杆页分别固定在支撑固定架顶端的左右两侧,并位于固定支承杆的外侧,压簧固定套装在第二收缩杆上,并且第二收缩杆的顶端与防护板的内侧端底部连接,并且仿真隼主体通过纵向立杆伸出至防护板外部。
5.本实用新型的固定式仿真隼,转动装置包括第二电机、第二主动锥齿轮、第二从动锥齿轮、转动轴和两组t型滑块,第二电机固定在升降板的顶端左侧,第二电机的输出端与第二主动锥齿轮连接,第二主动锥齿轮与第二从动锥齿轮啮合传动连接,并且第二从动锥齿轮固定在转动轴上,转动轴与升降板转动连接,升降板的顶端与转动板的底端中部连接,并且两组t型滑块分别对称固定在转动板底端的左右两侧,并与升降板的顶端滑动卡装。
6.本实用新型的固定式仿真隼,还包括防护箱和防尘网,防护箱固定在底座的顶端,并将第一电机、第一主动锥齿轮和第一从动锥齿轮罩住,并且防护箱的顶端右侧设置有多组散热孔,防尘网将多组散热孔覆盖住,并且防尘网固定在防护箱的顶端内侧壁上。
7.本实用新型的固定式仿真隼,还包括多组支撑腿、多组垫块和多组地脚螺栓,多组支撑腿均匀固定在底座的底端,垫块固定在支撑腿的底端,并且垫块与地面通过地脚螺栓连接。
8.本实用新型的固定式仿真隼,还包括两组加强板,两组加强板分别固定在螺杆上部的左右两端,并与升降板的底端连接。
9.本实用新型的固定式仿真隼,还包括隔震垫,隔震垫固定在底座与第一电机之间。
10.本实用新型的固定式仿真隼,弹簧和压簧的材质均为弹簧钢。
11.与现有技术相比本实用新型的有益效果为:通过第一电机带动第一主动锥齿轮转动,第一主动锥齿轮与第一从动锥齿轮啮合传动连接,使得螺管转动,从而使得螺杆带动升降板上下移动,进而使得转动板带动固定块和滚轮上下移动,使得两组防护板在滚轮、固定支承杆、第二收缩杆和压簧的配合使用下,进行自动开和,继而使得仿真隼主体在两组防护板之间上下移动,既避免了仿真隼主体长时间暴露在外界环境中,避免了被暴晒和被雨水冲湿,提高装置的使用寿命,同时便于对仿真隼主体进行高度的调节,便于驱散不同高度的鸟群,降低装置的使用局限性。
附图说明
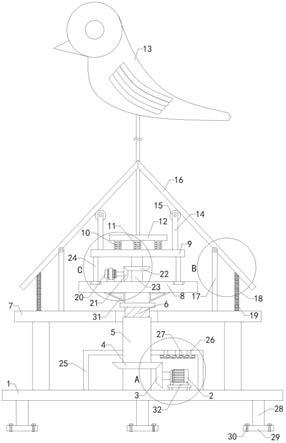
12.图1是本实用新型的正视及其部分剖视结构示意图;
13.图2是本实用新型a处的放大结构示意图;
14.图3是本实用新型b处的放大结构示意图;
15.图4是本实用新型c处的放大结构示意图;
16.附图中标记:1、底座;2、第一电机;3、第一主动锥齿轮;4、第一从动锥齿轮;5、螺管;6、螺杆;7、支撑固定架;8、升降板;9、转动板;10、第一收缩杆;11、弹簧;12、安装板;13、仿真隼主体;14、固定块;15、滚轮;16、防护板;17、固定支承杆;18、第二收缩杆;19、压簧;20、第二电机;21、第二主动锥齿轮;22、第二从动锥齿轮;23、转动轴;24、t型滑块;25、防护箱;26、散热孔;27、防尘网;28、支撑腿;29、垫块;30、地脚螺栓;31、加强板;32、隔震垫。
具体实施方式
17.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
18.如图1至图4所示,本实用新型的固定式仿真隼,包括底座1、第一电机2、第一主动锥齿轮3、第一从动锥齿轮4、螺管5、螺杆6、支撑固定架7、升降板8、转动装置、转动板9、多组第一收缩杆10、多组弹簧11、安装板12、纵向立杆、仿真隼主体13、两组固定块14、两组滚轮15、两组防护板16、两组固定支承杆17、两组第二收缩杆18和两组压簧19,第一电机2固定在底座1的顶端,第一电机2的输出端与第一主动锥齿轮3连接,第一主动锥齿轮3与第一从动锥齿轮4啮合传动连接,并且第一从动锥齿轮4固定在螺管5上,螺管5与底座1转动连接,螺杆6与螺管5螺装连接,并且螺杆6的顶部从支撑固定架7的中部穿过,并与升降板8的底端连接,支撑固定架7固定在底座1上,并且转动板9通过转动装置与升降板8连接,多组第一收缩杆10均匀固定在转动板9的顶端,弹簧11固定套装在第一收缩杆10上,并且安装板12固定在第一收缩杆10的顶端,仿真隼主体13通过纵向立杆固定在安装板12的顶端,两组固定块14
分别固定在转动板9顶端的左右两侧,两组滚轮15分别与两组固定块14的上部转动连接,并分别与两组防护板16的内侧端滚动接触,并且两组固定支承杆17分别与两组防护板16的内侧端中部铰接,并分别固定在支撑固定架7顶端的左右两侧,两组第二收缩杆18页分别固定在支撑固定架7顶端的左右两侧,并位于固定支承杆17的外侧,压簧19固定套装在第二收缩杆18上,并且第二收缩杆18的顶端与防护板16的内侧端底部连接,并且仿真隼主体13通过纵向立杆伸出至防护板16外部;仿真隼主体13内部设置有仿生组件,仿生组件可使仿真隼主体13模拟隼的叫声,并且带动头部和翅膀活动,其通过智能技术与鸟类行为心理学相结合,利用鸟类对隼类的自然内在的恐惧实现驱离,其以尽可能逼真细节,包括其在微风中轻微摇晃的方式、自动转向面对风的方向、休息时的状态等等,让所有鸟类防止不适应的方法、通过精密的机械和电子部件,完全模拟隼的细微动作和形态,智能化的叫声和时间变化自然控制,有效的控制驱鸟区域,通过第一电机2带动第一主动锥齿轮3转动,第一主动锥齿轮3与第一从动锥齿轮4啮合传动连接,使得螺管5转动,从而使得螺杆6带动升降板8上下移动,进而使得转动板9带动固定块14和滚轮15上下移动,使得两组防护板16在滚轮15、固定支承杆17、第二收缩杆18和压簧19的配合使用下,进行自动开和,继而使得仿真隼主体13在两组防护板16之间上下移动,既避免了仿真隼主体13长时间暴露在外界环境中,避免了被暴晒和被雨水冲湿,提高装置的使用寿命,同时便于对仿真隼主体13进行高度的调节,便于驱散不同高度的鸟群,降低装置的使用局限性。
19.本实用新型的固定式仿真隼,转动装置包括第二电机20、第二主动锥齿轮21、第二从动锥齿轮22、转动轴23和两组t型滑块24,第二电机20固定在升降板8的顶端左侧,第二电机20的输出端与第二主动锥齿轮21连接,第二主动锥齿轮21与第二从动锥齿轮22啮合传动连接,并且第二从动锥齿轮22固定在转动轴23上,转动轴23与升降板8转动连接,升降板8的顶端与转动板9的底端中部连接,并且两组t型滑块24分别对称固定在转动板9底端的左右两侧,并与升降板8的顶端滑动卡装;通过第二电机20带动第二主动锥齿轮21转动,第二主动锥齿轮21与第二从动锥齿轮22啮合传动连接,使得转动轴23在t型滑块24的配合使用下,带动转动板9转动,便于调节仿真隼主体13驱散鸟群的方位,进一步降低装置的使用局限性。
20.本实用新型的固定式仿真隼,还包括防护箱25和防尘网27,防护箱25固定在底座1的顶端,并将第一电机2、第一主动锥齿轮3和第一从动锥齿轮4罩住,并且防护箱25的顶端右侧设置有多组散热孔26,防尘网27将多组散热孔26覆盖住,并且防尘网27固定在防护箱25的顶端内侧壁上;通过设置防护箱25,对第一电机2、第一主动锥齿轮3和第一从动锥齿轮4进行防护,避免出现磕碰损伤,同时通过设置散热孔26和防尘网27,便于第一电机2的散热,避免第一电机2受热老化,提高装置的使用寿命。
21.本实用新型的固定式仿真隼,还包括多组支撑腿28、多组垫块29和多组地脚螺栓30,多组支撑腿28均匀固定在底座1的底端,垫块29固定在支撑腿28的底端,并且垫块29与地面通过地脚螺栓30连接;通过设置支撑腿28、垫块29和地脚螺栓30,避免装置使用时发生偏移或倾斜,提高装置的使用稳定性。
22.本实用新型的固定式仿真隼,还包括两组加强板31,两组加强板31分别固定在螺杆6上部的左右两端,并与升降板8的底端连接;通过设置加强板31,加强螺杆6与升降板8连接的强度,提高装置的结构稳定性。
23.本实用新型的固定式仿真隼,还包括隔震垫32,隔震垫32固定在底座1与第一电机2之间;通过设置隔震垫32,减小震动对第一电机2的影响,确保第一电机2的稳定运行。
24.本实用新型的固定式仿真隼,弹簧11和压簧19的材质均为弹簧钢;通过设置弹簧钢材质,进一步提高装置的结构强度,提高装置的使用寿命。
25.本实用新型的固定式仿真隼,其在工作时,首先通过第一电机2带动第一主动锥齿轮3转动,第一主动锥齿轮3与第一从动锥齿轮4啮合传动连接,使得螺管5转动,从而使得螺杆6带动升降板8上下移动,进而使得转动板9带动固定块14和滚轮15上下移动,使得两组防护板16在滚轮15、固定支承杆17、第二收缩杆18和压簧19的配合使用下,进行自动开和,继而使得仿真隼主体13在两组防护板16之间上下移动,既避免了仿真隼主体13长时间暴露在外界环境中,避免了被暴晒和被雨水冲湿,提高装置的使用寿命,同时便于对仿真隼主体13进行高度的调节,便于驱散不同高度的鸟群,降低装置的使用局限性,之后通过第二电机20带动第二主动锥齿轮21转动,第二主动锥齿轮21与第二从动锥齿轮22啮合传动连接,使得转动轴23在t型滑块24的配合使用下,带动转动板9转动,便于调节仿真隼主体13驱散鸟群的方位,进一步降低装置的使用局限性,然后通过设置防护箱25,对第一电机2、第一主动锥齿轮3和第一从动锥齿轮4进行防护,避免出现磕碰损伤,同时通过设置散热孔26和防尘网27,便于第一电机2的散热,避免第一电机2受热老化,提高装置的使用寿命,并且通过设置支撑腿28、垫块29和地脚螺栓30,避免装置使用时发生偏移或倾斜,提高装置的使用稳定性。
26.本实用新型的固定式仿真隼,其安装方式、连接方式或设置方式均为常见机械方式,只要能够达成其有益效果的均可进行实施;本实用新型的固定式仿真隼的仿真隼主体13为市面上采购,本行业内技术人员只需按照其附带的使用说明书进行安装和操作即可。
27.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变型,这些改进和变型也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1