一种精准饲喂器的制作方法
1.本实用新型涉及养殖相关的技术领域,具体来讲涉及的是一种用于猪场精准化养殖的精准饲喂器。
背景技术:
2.随着国家对养殖行业的大力扶持,大规模的生猪养殖场越来越多。但是生猪养殖的用人问题却未得到解决。愿意去猪场工作的多为当地农户,因为没有经过系统化的学习,对生猪生长阶段一些技术性的饲喂指标做不到科学化的喂养。为减少人猪接触,避免病毒感染,自动化饲喂成了养殖行业突破难关的必经之路。但市面上能找到的生猪饲喂器多为半自动化,需要人员去到生产线上单个操作机器。在一定程度上是减少了人员的使用,但是并没有从根本上解决人猪接触这个问题。
技术实现要素:
3.因此,为了解决上述不足,本实用新型在此提供一种精准饲喂器;本实用新型能够减少猪场人员配置,为猪场提供精准化管理,科学化决策,节本增效。
4.本实用新型是这样实现的,构造一种精准饲喂器,其特征在于;该饲喂器包括上位料仓、电机座、电机、扇叶、电路板、电机仓、称重传感器、下位料仓盖以及下位料仓;由上位料仓、电机仓和下位料仓竖向重叠形成该精准饲喂器的整体部分,上位料仓、电机仓和下位料仓分别具有出料口;所述电机通过电机座安装在电机仓中,电机的转动端设置扇叶,扇叶对应于上位料仓的出料口处;下位料仓的上部设置下位料仓盖,电机仓整体位于下位料仓盖上,下位料仓盖上设置称重传感器,电机仓与下位料仓盖通过称重传感器连接,形成上下受力差,从而可对下位料仓称重;所述电路板的信号输入端与称重传感器连接,电路板的信号输出端与电机连接。
5.根据本实用新型所述一种精准饲喂器,其特征在于;上位料仓的上部设置顶盖,顶盖上通过抱箍设置有挡料片,该挡料片对应于上位料仓的出料口处,用于对上位料仓的出料进行控制。
6.根据本实用新型所述一种精准饲喂器,其特征在于;下位料仓的底部设置堵料球。
7.根据本实用新型所述一种精准饲喂器,其特征在于;所述电路板位于电机仓内。
8.根据本实用新型所述一种精准饲喂器,其特征在于;pcb单片机根据接收到的饲喂计划,定时连通电机带动扇叶进行下料。同时,内置于下位料仓的称重传感器开始称重。
9.本实用新型具有如下优点:本实用新型能够减少猪场人员饲养不规范、不科学、人工成本高的问题,解决猪场精准化管理,科学化决策,为猪场节本增效;降低人工成本,现代饲喂器技术一人单次只能操作一台机器,工作效率低而且繁琐。新型饲喂器可以采用物联网的工作模式,将任务接口通过mqtt协议外扩到云端实现一人多机同时控制极大的减少人工费用。
附图说明
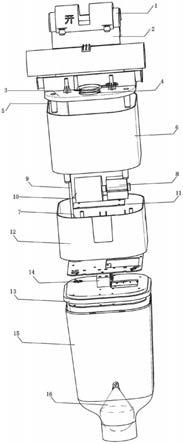
10.图1是本实用新型所述精准饲喂器示意图。
11.其中:1、抱箍,2、挡料片,3、顶盖,4、放药口,5、拉线轮滑,6、上位料仓,7、电机座,8、扇叶,9、堵料球拉线,10、电机,11、电路板,12、电机仓,13、下位料仓盖,14、称重传感器,15、下位料仓,16、堵料球。
具体实施方式
12.下面将结合附图1对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
13.本实用新型通过改进在此提供一种精准饲喂器,如图1所示,可以按照如下方式予以实施;该饲喂器包括上位料仓6、电机座7、电机10、扇叶8、电路板11、电机仓12、称重传感器13、下位料仓盖14以及下位料仓15;由上位料仓6、电机仓12和下位料仓15竖向重叠形成该精准饲喂器的整体部分,上位料仓6、电机仓12和下位料仓15分别具有出料口;所述电机10通过电机座7安装在电机仓12中,电机10的转动端设置扇叶8,扇叶8对应于上位料仓6的出料口处,电机10通过工作带动扇叶8转动,扇叶8通过转动实现对出料的控制。对于本实用新型来讲,实施时是将扇叶安装在电机轴上,电机安装在电机座上,用螺丝固定于电机仓里,扇叶有一半的体积置于出料口上起到堵料作用。另外,对于物料的封堵以及控制物料通过来讲:电机扇叶采用硬胶材质具有较强的受力功能,且有一半的体积卡入凸出的下料口出,出料口被电机扇叶所堵住。电机通电后带动扇叶转动,物料被扇叶带动进行下料。(对于扇叶来讲如何起到堵料作用:电机加上扇叶若要使其在外力作用下转动需要约等于50n的重力(理论依据或设计依据如下:因为此处所使用的电机为60k每分钟30转的同步电机。每分钟所对应的力为50n)。实际物料下落至料口时候是分散落下所以不会让扇叶两边产生重力差不会达到50n(能够确保重力差值:上位料仓存料为大值为1.8kg。重力的大小与质量的比值为9.8n/kg,那么1.8kg就等于17.64n。电机所能承受的力远远大于上位料仓存料值)。实现对物料的控制:实施时,扇叶是通过连接轴固定在电机轴上面的,然而电机是采用永磁同步电机,在没有通电驱动的情况下很难用外力使扇叶转动(电机中定子和转子是可转动配合,在外力作用下会转动,重力不够时是不会转动的)。下位料仓15的上部设置下位料仓盖14,电机仓12整体位于下位料仓盖14上,下位料仓盖14上设置称重传感器13(对于下位料仓盖来讲,下位料仓与上位料仓通过拉力式应变片传感器连接,称重是根据下位料仓实时重力进行称重力,上下位料仓通过电机扇叶进行封堵和运输物料,通电时扇叶转动物料从两片扇叶中滑落下料),且称重传感器13对应于电机仓12的出料口处(即下位料仓盖14设置于下位料仓15的上部,用于安装称重传感器13,此时称重传感器13刚好对应于电机仓12的出料口下方,随着扇叶8的转动能够带动饲料从上位料仓6中下放,再经电机仓12下放至下位料仓15中,最后经下位料仓15放出至饲料槽,当途径电机仓12出口时经称重传感器13检测(称重传感器根据收到外力情况,内部电阻应变片会发生形变,在通过ad芯片转换为实时重力数据,以此实现称重),称重传感器13再将信号传输至电路板11,达到预定量时控制电机10停止,以此实现对下放的饲料称重,从而通过称重传感器实现对出料量的控制);所述
电路板11位于电机仓12内,所述电路板11的信号输入端与称重传感器13连接,电路板11的信号输出端与电机10连接。拉力式应变片和压力式应变片是同一个物体只是他们安装结构不同,它的结构为底层为塑料薄膜(厚度16um)起着与下面金属隔离的作用,中间层为金属电阻片,顶层为敏感栅(厚度为4um);附着于金属物上随着金属物形变使电阻值变化,测量电阻值变化可得知重力。连接方式:他固定于上下盖中间与上盖通过两颗m6螺丝连接 与下盖同样通过两颗m6螺丝固定到传感器另一端,称重方式:不是对流经饲料称重而是对下料料筒及下位料仓盖14整个重量进行称重。
14.本实用新型所述一种精准饲喂器实施时;上位料仓6的上部设置顶盖3,顶盖3上通过抱箍1设置有挡料片2,该挡料片2对应于上位料仓4的进料口处,用于对上位料仓的进料进行控制,当需要放进饲料时手动将挡料片2打开。
15.本实用新型实施时;将饲料投放进上位料仓6内存储,控制电机10工作带动扇叶8转动,即可将上位料仓6内存储的饲料经过电机仓12下放进下位料仓15内,在下放过程中由称重传感器13对其检测,当量达到设定值时,可通过电路板11对电机10进行停止控制。图1中,饲喂器中放药口4的作用是用于将药物放于饲料中,拉线轮滑5、用于配合猪场机械化拉堵料球设备的方向,可调节饲喂器拉绳方向和减小拉堵料球阻力,堵料球拉线9用于拉堵料球。
16.在本实用新型中,所述下位料仓15的底部还可以设置堵料球16。对于堵料球来讲,可通过外部控制下料的开关来控制堵料球的目的,以此来到达最终的下料的目的和效果。堵料球主要功能是在饲喂器通过精准计量下料到下位料仓15后,再将饲料投放到食槽。其主要工作是,堵料球16通过软连线与对应的动力驱动进行有效的连接,当精准计量完成,通过饲养场专业饲养员统一操作(启动)外部驱动装置,将堵料球16进行提升,再以此将饲料下到对应食槽,饲料下料完毕,再放下放堵料球,整个工作过程完毕,进入下一次精准计量放料的准备。堵料球与外部驱动装置之间可以按照如下实施,以此实现对堵料球的控制;堵料球顶部有个栓拉线的小孔,底部料仓盖、电机仓、上位料仓和上位料仓盖都有设计拉线孔,上位料仓盖设计有拉绳轮滑,用于配合猪场机械化拉堵料球装置方向,可调节饲喂器拉绳方向和减小拉堵料球阻力。通过猪场机械化拉堵料球装置实现同时拉起放料,放下堵料。
17.本实用新型能够减少猪场人员饲养不规范、不科学、人工成本高的问题,解决猪场精准化管理,科学化决策,为猪场节本增效。
18.对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本实用新型。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本实用新型的精神或范围的情况下,在其它实施例中实现。因此,本实用新型将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1