一种育苗移栽机
1.本发明涉及农业机械技术领域,特别是涉及一种育苗移栽机。
背景技术:
2.穴盘育苗是欧美国家20世纪70年代兴起的一项新的育苗技术,其是一种保护根系的种植方法,穴盘中的土壤是根据需要配置的,营养更丰富,利于幼苗成长,同时幼苗之间相互隔开,避免根系缠绕,定植后缓苗快。穴盘育苗现已成为许多国家专业化商品苗生产的主要方式。
3.对于生长周期较长的幼苗,穴盘育苗完成后还需要将每棵幼苗移入单个的营养钵中,目前已经成功研制出了多种适用于穴盘育苗的自动移栽机,但是,这些移栽机虽然工作效率高且可靠性强,但大部分移栽机在作业过程中需要采用人工喂苗,并且在运行中存在较多的间断停顿,作业强度大,效率低下。
4.因此本领域技术人员致力于开发一种不需要人工喂苗且无间断停顿的育苗移栽机。
技术实现要素:
5.有鉴于现有技术的上述缺陷,本发明公开了一种育苗移栽机,所要解决的技术问题是提供一种不需要人工喂苗且无间断停顿的育苗移栽机。
6.为实现上述目的,本发明提供了一种育苗移栽机,包括夹苗装置,所述夹苗装置的下侧设有穴盘传送装置,所述穴盘传送装置和夹苗装置之间设有分苗装置,所述分苗装置的下侧设有鸭嘴放苗装置,所述鸭嘴放苗装置的下方为承接装置,所述承接装置的一侧上方设有送土装置,承接装置的下方设有集中装载装置。
7.优选的,本发明提供的一种育苗移栽机,还包括安装架,所述夹苗装置包括第一导轨,所述第一导轨的两端固定在所述安装架上,所述第一导轨上滑动安装有滑板,所述滑板连接有前进后退气缸,滑板的下侧连接上下移动气缸的一端,所述上下移动气缸的另一端连接有第二导轨,所述第二导轨内滑动安装有活动苗夹板,所述活动苗夹板内设有固定苗夹板,所述活动苗夹板连接有苗夹开合气缸,所述活动苗夹板和固定苗夹板上均设有相配合的苗夹。
8.优选的,所述上下移动气缸和第二导轨之间设有连接块;所述第二导轨设有滑动槽,所述滑动槽内安装所述活动苗夹板,活动苗夹板设有滑槽,所述滑槽的顶部搭设有支架,所述支架上安装所述苗夹,滑槽内安装所述固定苗夹板。
9.优选的,所述穴盘传送装置包括设于所述安装架上的第一链轮传动机构,所述第一链轮传动机构由传动电机驱动,第一链轮传动机构上设有感应螺杆,安装架上设有检测所述感应螺杆的接近传感器。
10.优选的,所述分苗装置包括固定于所述安装架上的第二链轮传动机构,所述第二链轮传动机构的外侧等距固定安装有多个分苗杯,每个所述分苗杯的外侧设有活动门,所
有分苗杯的外侧设有关闭所述活动门的环形阻挡杆,环形阻挡杆上设有可供活动门开启的开口。
11.优选的,所述分苗杯的截面形状为直角三角形,分苗杯的斜边侧为所述活动门。
12.优选的,所述鸭嘴放苗装置包括固定于安装架上的龙门架,所述龙门架的顶部安装有鸭嘴升降气缸和鸭嘴开合气缸;所述鸭嘴升降气缸的活塞杆连接有活动架,所述活动架的底部固定安装有支撑环,所述支撑环位于所述环形阻挡杆的开口的下方;所述支撑环的中部下侧铰接有第一鸭嘴板和第二鸭嘴板,所述第一鸭嘴板和第二鸭嘴板之间开口相对设置;所述活动架上设有滑动架,所述滑动架的下端分别与第一鸭嘴板和第二鸭嘴板铰接,滑动架与所述鸭嘴开合气缸连接。
13.优选的,所述承接装置包括固定于所述安装架上的第三链轮传动机构,所述第三链轮传动机构的外侧固定安装有多个等距的承接器,每个所述承接器的底部设有翻动门,所有承接器的下侧设有阻挡装置,所述阻挡装置连接有推动气缸。
14.优选的,所述送土装置包括固定于所述安装架上的漏斗,所述漏斗的底部设有转筒和接土器,所述转筒连接有放土电机,所述接土器位于所述承接器的上方。
15.优选的,所述集中装载装置位于所述安装架的底部,集中装载装置包括可移动的底托盘,所述底托盘上设有第四链轮传动机构,所述第四链轮传动机构上放置有装载托盘,所述装载托盘与所述承接器相对应。
16.本发明的有益效果是:
17.通过各个装置的同步设计,穴盘传送装置将装有较多幼苗的穴盘运送到指定位置,夹苗装置运动进行夹苗并将幼苗投入分苗装置内,分苗装置将幼苗依次投入鸭嘴放苗装置。同时,人工将营养钵放到承接装置上,送土装置为营养钵内放入营养土,鸭嘴放苗装置再将幼苗植入营养钵内,承接装置内植入幼苗后的营养钵落入集中装载装置中,便可进行统一运送。
18.本发明的育苗移栽机工作时连续进行,无需复位,即在运转过程中,前一个流程尚未走完,下一流程便已开始工作,因此不存在间断停顿,且不需要人工喂苗,提高了工作效率。本育苗移栽机适用于生长周期较长的幼苗的自动装杯,为实现从穴盘培育到营养钵育苗提高自动化程度。
附图说明
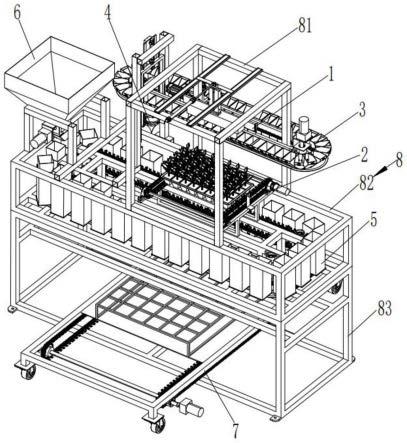
19.图1是本发明具体实施方式的整体结构示意图;
20.图2是本发明的夹苗装置的结构示意图;
21.图3是本发明的夹苗装置的部分结构示意图;
22.图4是本发明的夹苗装置的固定苗夹板的结构示意图;
23.图5是本发明的穴盘传送装置的结构示意图;
24.图6是本发明的分苗装置的结构示意图;
25.图7是本发明的分苗装置的分苗杯的结构示意图;
26.图8是本发明的鸭嘴放苗装置的结构示意图;
27.图9是本发明的承接装置的结构示意图;
28.图10是本发明的承接装置的结构示意图;
29.图11是本发明的送土装置的结构示意图;
30.图12是本发明的送土装置的转筒的结构示意图;
31.图13是本发明的集中装载装置的结构示意图。
32.上述附图中:1、夹苗装置;11、第一导轨;12、滑板;13、前进后退气缸; 14、上下移动气缸;15、第二导轨;151、连接块;152、滚珠;16、活动苗夹板;161、支架;17、固定苗夹板;18、苗夹开合气缸;2、穴盘传送装置;21、第一链轮传动机构;22、传动电机;23、感应螺杆;24、接近传感器;3、分苗装置;31、分苗杯;311、活动门;32、第二链轮传动机构;33、环形阻挡杆;331、开口;4、鸭嘴放苗装置;41、龙门架;42、鸭嘴升降气缸;43、鸭嘴开合气缸;44、活动架;45、支撑环;46、第一鸭嘴板;47、第二鸭嘴板;48、滑动架;5、承接装置;51、承接器;511、翻动门;52、阻挡装置;53、第三链轮传动机构;54、推动气缸;6、送土装置;61、漏斗;62、转筒;63、接土器;64、放土电机;7、集中装载装置;71、底托盘;72、装载托盘;73、托盘电机;74、第四链轮传动机构;8、安装架;81、顶层架;82、中层架;83、底层架。
具体实施方式
33.下面结合附图和实施例对本发明作进一步说明,需注意的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方式构造和操作,因此不能理解为对本发明的限制。术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
34.如图1所示,本发明提供了一种育苗移栽机,包括安装架8,安装架8包括顶层架81、中层架82和底层架83。顶层架81上设有夹苗装置1,夹苗装置1 的下侧即顶层架81的底部设有穴盘传送装置2,穴盘传送装置2用于放置育有幼苗的穴盘,夹苗装置1用于一次性在在穴盘内夹取多棵幼苗。穴盘传送装置2 和夹苗装置1之间设有分苗装置3,分苗装置3的下侧设有鸭嘴放苗装置4,夹苗装置1将幼苗投入分苗装置3,分苗装置3内的幼苗被依次投入鸭嘴放苗装置 4。鸭嘴放苗装置4的下方为承接装置5,承接装置5的一侧上方设有送土装置 6,送土装置6为承接装置5内送土,鸭嘴放苗装置4将幼苗植入有土的承接装置5内,完成移栽。承接装置5的下方设有集中装载装置7,集中装载装置7用于集中装载和转运移栽后的幼苗。
35.通过各个装置的同步设计,穴盘传送装置2将装有较多幼苗的穴盘运送到指定位置,夹苗装置1运动进行夹苗并将幼苗投入分苗装置3内,分苗装置3 将幼苗依次投入鸭嘴放苗装置4。同时,人工将营养钵放到承接装置5上,送土装置6为营养钵内放入营养土,鸭嘴放苗装置4再将幼苗植入营养钵内,承接装置5内植入幼苗后的营养钵落入集中装载装置7中,便可进行统一运送。
36.本发明的育苗移栽机工作时连续进行,无需复位,即在运转过程中,前一个流程尚未走完,下一流程便已开始工作,因此不存在间断停顿,且不需要人工喂苗,提高了工作效率。本育苗移栽机适用于生长周期较长的幼苗的自动装杯,为实现从穴盘培育到营养钵育苗提高自动化程度。
37.如图2和图1所示,夹苗装置1包括第一导轨11,第一导轨11的两端固定在顶层架81上,第一导轨11上滑动安装有滑板12,滑板12通过安装于顶层架 81上的前进后退气缸13控制。滑板12的下侧连接上下移动气缸14的一端,上下移动气缸14的另一端连接有第二导轨
15,上下移动气缸14和第二导轨15之间设有连接块151。如图3所示,第二导轨15设有滑动槽,滑动槽内安装活动苗夹板16,第二导轨15和活动苗夹板16之间设有滚珠152。同时,活动苗夹板16设有滑槽,滑槽的顶部搭设有支架161,支架161上安装苗夹,滑槽内安装固定苗夹板17,固定苗夹板17通过连接支块(图中未示出)与连接块151固定连接。如图4所示,固定苗夹板17上设有与活动苗夹板16对应的苗夹。
38.活动苗夹板16的一端连接有苗夹开合气缸18,苗夹开合气缸18带动活动苗夹板16在第二导轨15内滑动,使活动苗夹板16的苗夹向固定苗夹板17的苗夹靠近或远离,从而完成夹取或放下幼苗的动作。前进后退气缸13用于控制夹苗装置1前后方向的运动,上下移动气缸14用于控制夹苗装置1上下方向的运动,从而使苗夹在穴盘传送装置2和分苗装置3之间运动,完成夹苗与放苗的动作。
39.如图5和图1所示,穴盘传送装置2的底部设有支撑架,支撑架固定于顶层架81的底部即中层架82的顶部。穴盘传送装置2包括第一链轮传动机构21,第一链轮传动机构21包括平行的两组链轮,链轮的链条上用于放置穴盘,穴盘里每排幼苗的间距和数量与苗夹相对应。一组链轮由传动电机22驱动,并在该组链轮的链条上设有感应螺杆23,安装架8上设有检测感应螺杆23的接近传感器24。
40.如图6和图1所示,分苗装置3包括固定于顶层架81中部的第二链轮传动机构32,第二链轮传动机构32为一组平置的链轮,链轮的链条外侧等距固定安装有多个分苗杯31,使得分苗杯31形成跑道型的连续循环,分苗杯31一侧直行的部分的间距与苗夹相对应。如图7所示,每个分苗杯31的截面形状为直角三角形,分苗杯31的斜边侧为活动门311。所有分苗杯31的外侧设有关闭活动门311的环形阻挡杆33,环形阻挡杆33上设有可供一个活动门311开启的开口 331。分苗装置3通过转动电机驱动,使每个分苗杯31依次运行到开口331处打开活动门311,将幼苗落下。采用链条传输的分苗杯31环形分布,苗夹放苗之后再一次重复夹取幼苗,并在前进后退气缸13的作用下位移至分苗杯31上方等待,等最端部的苗夹上方的分苗杯31中没有幼苗时,苗夹打开,再次将幼苗依次置于分苗杯31中。
41.如图8和图1所示,鸭嘴放苗装置4包括固定于中层架82上的龙门架41,龙门架41的顶部安装有鸭嘴升降气缸42和鸭嘴开合气缸43。鸭嘴升降气缸42 的活塞杆连接有活动架44,活动架44的底部固定安装有支撑环45,支撑环45 位于环形阻挡杆33的开口331的下方。支撑环45的中部下侧铰接有第一鸭嘴板46和第二鸭嘴板47,第一鸭嘴板46和第二鸭嘴板47之间开口331相对设置。活动架44上设有滑动架48,滑动架48的下端分别与第一鸭嘴板46和第二鸭嘴板47上端设置的支板铰接,滑动架48与鸭嘴开合气缸43连接。鸭嘴升降气缸 42用于带动活动架44上下移动,从而带动鸭嘴移动,使鸭嘴下移至承接装置5 处或者上移至分苗杯31的下方。鸭嘴开合气缸43拉动滑动架48,使第一鸭嘴板46和第二鸭嘴板47同时绕着支撑环45中部的铰接轴转动,从而使第一鸭嘴板46和第二鸭嘴板47相对打开或者关闭。
42.当幼苗掉入处于最高姿态的鸭嘴放苗装置4中后,在鸭嘴上下移动气缸14 的带动下,闭合的鸭嘴下移并插入正下方的营养钵中,进行打穴,将营养钵中的土挤向四周,之后在鸭嘴开合气缸43的作用下,第一鸭嘴板46和第二鸭嘴板47相对打开,将幼苗放于凹坑中,之后鸭嘴上移、闭合进行复位。此时植株幼苗位于营养钵的中心处,四周的土在没有外力作用下自然松垮,将幼苗的根土复合体包裹,从而保证幼苗在装杯过程中的直立度。
43.如图9、10和图1所示,承接装置5包括固定于中层架82上的第三链轮传动机构53,
第三链轮传动机构53为一组平置的链轮,链轮的链条外侧固定安装有多个等距的承接器51,承接器51形成封闭的连续循环,承接器51与分苗杯 31的循环移动方向相反,本实施例中承接器51形成了类似于倒角的矩形形状的连续循环。每个承接器51的底部设有可以打开的翻动门511,翻动门511的铰接边均位于内侧。所有承接器51的下侧设有阻挡装置52,阻挡装置52为围成形状为倒角矩形的活动档杆,活动档杆处于翻动门的下侧,可以将每个翻动门关闭。活动档杆连接有推动气缸54,当推动气缸54使得活动档杆平移时,处于两个长边位置的承接器51的翻动门511一边打开,一边任处于关闭状态,而处于两个短边位置的承接器51的翻动门511一直处于关闭状态,翻动门511打开的一边的营养钵落入下侧的集中装载装置7。
44.如图11和图1所示,送土装置6包括固定于中层架82上的漏斗61,漏斗 61的底部设有转筒62和接土器63,转筒62连接有放土电机64,接土器63位于承接器51的上方。如图12所示,转筒62为风车状,用叶片推动土落下或者关闭漏斗61的出土端。人工将营养钵放置在承接器51内以后,送土装置6向营养钵内注入营养土,装有营养土的营养钵运动至鸭嘴放苗装置4的下方,闭合的鸭嘴下移并插入正下方的营养钵中,进行打穴,将营养钵中的土挤向四周,之后鸭嘴开合气缸43的作用下,鸭嘴打开,将植株幼苗放于凹坑中,之后鸭嘴上移、闭合进行复位。
45.如图13和图1所示,集中装载装置7位于底层架83的底部,集中装载装置7包括安装有脚轮的底托盘71,底托盘71上设有由托盘电机73驱动的第四链轮传动机构74,第四链轮传动机构74包括平行的两组链轮,链轮的链条上用于放置装载托盘72。装载托盘72上设有承接孔,每排承接孔的间距和数量与处于长边位置的翻动门可以打开的承接器51相对应。
46.整个育苗移栽机的工作过程为:
47.启动plc程序开始工作,人工将营养钵放入承接器51内,漏斗61在放土电机64和转筒62的作用下,依次向漏斗61与鸭嘴放苗装置4间的四个营养钵放土,使得即将接苗的营养钵中有土。人工将穴盘培育的幼苗放到第一链轮传动机构21的链条上,转速为20r/min的传动电机22带动链条转动,从而拖动带有幼苗的穴盘移动一定的距离。接近传感器24识别到链条上的感应螺栓而发出停止信号,在主控箱的控制下,传动电机22停止转动。
48.然后,处于正上部的上下移动气缸14下移,苗夹插入到穴盘的土里一定深度后,苗夹开合气缸18动作,使固定苗夹板17的苗夹向活动苗夹板16的苗夹靠近并夹取植株的根土复合体,最后在上下移动气缸14的带动下上移,在前进后退气缸13的作用下运输到分苗杯31处,苗夹开合气缸18停止动作,苗夹打开恢复原位,将幼苗置于分苗杯31中。由于最初状态时,端部有幼苗的分苗杯 31距鸭嘴放苗装置4仍有一定的距离,分苗杯31将进行数个空运转,使得端部有幼苗的分苗杯31向鸭嘴放苗装置4靠近,并保证即将放苗的分苗杯31中有苗。
49.当一批次的营养钵(本实施例中为六杯)完成装苗后,承接器51底板下的活动档杆在推动气缸54的作用下向内运动,翻动门在营养钵及其自身重力的作用下打开,营养钵落入位于下方的装载托盘72中。装载托盘72在链条的带动下移动一定距离,为下一批营养钵“腾位”,使得下一批次的营养钵仍可以被顺利推入装载托盘72,待装载托盘72的所有承接孔均被放满之后,整体拖出装车。
50.接下来以上的放土、送苗、夹苗、投苗、植苗、移苗同步进行,无需等待,周而复始循
环进行,因此不存在间断停顿,且不需要人工喂苗,提高了移栽效率。
51.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1