种子沟槽闭合传感器的制作方法
种子沟槽闭合传感器
1.本技术是2018年11月15日提交的、申请号为201880074028.6、发明名称为“种子沟槽闭合传感器”的中国发明专利申请的分案申请。
背景技术:
2.众所周知,种子沟槽内种子与土壤的良好接触是均匀的种子出苗和高产的关键因素。虽然对种子沟槽进行抽查可以有助于在一定程度上确保实现这些关键因素,但这种抽查仅会识别检查的特定位置处的状况。因而,需要一种系统,该系统将核实在播种操作期间实现了种子与土壤的良好接触,并且使得种植机能够在移动的同时自动或远程调整。
附图说明
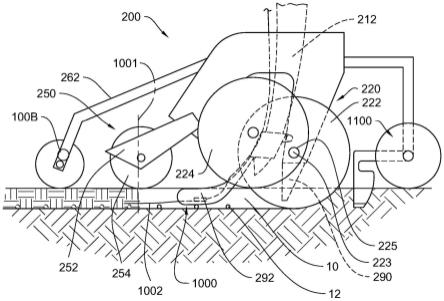
3.图1是农用种植机的行单元的实施例的侧部正视图。
4.图2图示了部署在种植机行单元上的沟槽闭合传感器和参考传感器的实施例。
5.图3是适于用作沟槽闭合传感器的种子加固器的实施例,示出了耦接到部署在种子加固器的主体中的器械的拖线。
6.图4图示了利用耦接到拖线的后端的压力换能器的沟槽闭合传感器的实施例。
7.图5图示了具有垂直堆叠的拖线的沟槽闭合传感器的实施例。
8.图6通过在拖线的末端包括导电尖端图示了图5的替代实施例。
9.图7是适于用作沟槽闭合传感器的种子加固器的实施例的侧视图,示出了种子加固器的可分离部分,其中拖线在该可分离部分中。
10.图8是适于用作沟槽闭合传感器的种子加固器的另一个实施例的侧视图,示出了在种子加固器主体的可分离部分中的拖线。
11.图8a是沿着图8的线b-b的横截面视图,示出了部署在种子加固器主体的可分离部分中的板的实施例。
12.图9是适于用作沟槽闭合传感器的种子加固器的另一个实施例的侧视图,示出了两个磁体之间的霍尔效应传感器。
13.图10是适于用作沟槽闭合传感器的种子加固器的侧视图,示出了可分离的拖线。
14.图11示出了拖线的实施例,该拖线具有部署在拖线上方的多个磨损保护件。
15.图12是具有弯曲的或蜿蜒的拖线的沟槽传感器的顶视图。
16.图13示出了参考传感器的实施例。
17.图14是参考传感器的实施例的放大侧视图。
18.图15是图6的参考传感器的后视图。
19.图16图示了替代参考传感器。
20.图17图示了替代参考传感器。
21.图17a是图17中示出的参考传感器的前正视图。
22.图18是适于用作沟槽闭合传感器的种子加固器的实施例,示出了耦接到部署在种子加固器的主体中的器械并且具有多个安装有加固器的传感器的拖线。
23.图19-19a是适于用作沟槽闭合传感器的种子加固器的实施例,示出了鼓压力传感器。
24.图20是适于感测种子沟槽中的电导率的附件的实施例。
25.图21是部署在种子沟槽中的图20的附件的后视图。
26.图22是适于用作沟槽传感器的种子加固器的实施例,示出了对准探针。
27.图23以正视图示意性地图示了相对于种子沟槽部署的工作层传感器的一个实施例。
28.图24a-24c是由图23的工作层传感器生成的工作层图像的代表性示例。
29.图25以平面图示意性地图示了相对于种子沟槽部署的工作层传感器的另一个实施例。
30.图26a-26b是由图25的工作层传感器生成的工作层图像的代表性示例。
31.图27以正视图示意性地图示了相对于种子沟槽部署的工作层传感器的另一个实施例。
32.图28是由图27的工作传感器生成的工作层图像的代表性示例。
33.图29图示了工作层机具监视、控制和操作者反馈系统的实施例。
34.图30是示出工作层机具监视、控制和操作者反馈的过程的图表。
35.图31图示了部署在闭合系统上的水平(leveling)传感器的实施例。
36.图32是部署在闭合系统上的抛土传感器的实施例。
37.图33是部署在闭合系统上的抛土传感器的另一个实施例。
38.图34图示了部署在闭合系统上的沟槽闭合传感器和传感器系统的实施例。
39.图35图示了部署在闭合系统上的沟槽闭合传感器和角度传感器的实施例。
40.图36是在行进方向上看时定位在具有种子的沟槽上方的闭合轮的后视图。
41.图37是用于基于沟槽闭合传感器生成的信号来实现对闭合轮组件和压实轮组件的操作控制的系统的图。
42.图38是图示用于基于参考传感器和沟槽闭合传感器来实现操作控制和操作者反馈的实施例的流程图。
43.图39图示了沟槽闭合传感器的实施例。
具体实施方式
44.现在参考附图,其中贯穿若干视图,相似的附图标记表示相同或对应的部分,图1图示了农业种植机行单元200的实施例。行单元 200包括框架204,该框架204通过平行联动装置206枢转地连接到工具栏202,使得每个行单元200能够独立于工具栏202垂直地移动。框架204可以可操作地支撑一个或多个料斗208、种子计量器210、种子输送机构212、下压力控制系统214、种子沟槽打开组件220、沟槽闭合组件250、压实轮组件260和行清洁器组件270。应当理解的是,图7中所示的行单元200可以用于常规种植机,或者行单元 200可以用于中央填充种植机,在这种情况下,料斗208可以替换为一个或多个微型料斗和进行相应修改的框架204,如本领域技术人员将认识到的那样。
45.下压力控制系统214被配置为在行单元200上施加抬升力和/或下压力,诸如在美国公开no.us2014/0090585中公开的,该文献通过引用整体并入本文。
46.种子沟槽打开组件220可以包括由框架204的向下延伸的柄构件 205可旋转地支撑的一对开口盘222。开口盘222可以被布置为向外和向后发散,以便在种植机横越田地时在土壤11中打开v形沟槽10。种子输送机构212(诸如种子管或种子输送机)可以定位在开口盘 222之间,以将种子从种子计量器210输送到打开的种子沟槽10中。种子沟槽10的深度可以由一对量规轮224控制,该量规轮224定位成与开口盘222相邻。量规轮224可以由量规轮臂226可旋转地支撑,该量规轮臂226的一端绕枢转销228枢转地固定到框架204。摇臂 230可以通过枢转销232枢转地支撑在框架204上。在这种实施例中,应当认识到的是,摇臂230绕枢转销232的旋转通过限制量规轮臂 226(并因此限制量规轮)相对于开口盘222的向上行进来设置沟槽 10的深度。摇臂230可以经由安装到行单元框架204的线性致动器 234被可调整地定位,并且可以枢转地耦接于摇臂230的上端。线性致动器234可以被远程控制或自动致动,如例如在国际公开no. wo2014/186810中所公开的,该文献通过引用整体并入本文。
47.下压力传感器238可以被配置为生成与量规轮224施加在土壤上的力的量相关的信号。在一些实施例中,用于摇臂230的枢转销232 可以包括下压力传感器238,诸如美国专利no.8561472中公开的插桩销,该专利通过引用整体并入本文。
48.种子计量器210可以是任何可商购的种子计量器,诸如本领域众所周知的指型种子计量器或真空型种子计量器。合适的真空型种子计量器的一个示例是可从precision planting llc,23207townline rd, tremont,il 61568获得的vset计量器。
49.沟槽闭合组件250可以包括枢转地附接到行单元框架204的闭合轮臂252。一对偏移的闭合轮254可以可旋转地附接到闭合轮臂252,并且成角度地部署成通过将打开的种子沟槽的壁一起推回到沉积的种子12上方来“闭合”种子沟槽10。致动器256可以在一端枢转地附接到闭合轮臂252,并且在其另一端枢转地附接到行单元框架204,从而根据土壤条件改变由闭合轮254施加的向下压力。闭合轮组件 250可以是在国际公开no.wo2014/066650中公开的类型,该文献通过引用整体并入本文。
50.压实轮组件260可以包括臂262,该臂262枢转地附接到行单元框架204并且在闭合轮组件250的后方延伸并与其对准。臂262可以可旋转地支撑压实轮264。致动器266可以在一端处枢转地附接到臂 262,而在其另一端处枢转地附接到行单元框架204,从而改变由压实轮264施加的向下力的量,以将土壤压实在种子沟槽10上。
51.行清洁器组件270可以是任何可商购的行清洁器组件。合适的行清洁器组件的一个示例是可从precision planting llc,23207 townline rd,tremont,il 61568获得的cleansweep系统。行清洁器组件270可以包括臂272,该臂272枢转地附接到行单元框架 204的前端并且与沟槽打开组件220对准。一对行清洁器轮274可以可旋转地附接到臂272的前端。致动器276可以在一端处枢转地附接到臂272,而在其另一端处枢转地附接到行单元框架204,以调整臂上的下压力从而根据作物残余物的量和土壤条件来改变行清洁轮274 的动作的侵略性。
52.参考图37和38,监视器300对于拉动种植机的拖拉机的驾驶室内的操作者是可见的。监测器300可以与gps单元310、沟槽闭合组件致动器256和压实轮组件致动器266进行信号通信,以使得能够基于由沟槽闭合传感器1000(如下所述)生成的信号对沟槽闭合组件250和压实轮组件260进行操作控制。而且,如稍后讨论的,监视器300可以被编程为基于由
沟槽闭合传感器1000产生的信号来显示操作建议。监测器300还可以分别与行清洁器致动器276、深度调整致动器234、下压力控制系统214和沟槽打开组件230信号通信。
53.如本文所述的沟槽闭合传感器和其它传感器的各种实施例可以被用于核实在种植操作期间是否实现了种子与土壤的良好接触,并且可以使得种植机能够在移动的同时自动或远程调整。
54.i.沟槽内传感器
55.a.拖线拉动传感器
56.图2图示了沟槽闭合传感器1000的一个实施例,该传感器确定闭合轮组件250是否用土壤充分闭合了打开的种子沟槽10和/或确定种子沟槽10内种子上方的土壤压实量。沟槽闭合传感器1000包括被部署成在种子沟槽10中拖曳的线、绳或其它合适的细长构件(在下文中被称为“拖线”1002)。一般而言,由于在种植操作期间闭合轮组件250将打开的种子沟槽10和拖线1002用土壤覆盖,因此沟槽闭合传感器1000通过测量将线1002拉过土壤所需的力的大小,或者通过测量拖线中的应变、拉力或张力的量,或者通过测量作用在拖线 1002上的土壤压力的量来测量或检测种子沟槽是否被土壤充分地闭合。
57.为了充分地测量或检测种子沟槽是否被土壤充分地闭合,拖线 1002的端部可以终止于垂直轴线1001或沿垂直轴1001向后几英寸,该垂直轴线1001延伸通过行单元200的闭合轮组件250的闭合轮 254的中心。
58.拖线1002可以由允许拖线1002的后端在种子沟槽10内被拖曳的任何合适的结构支撑。例如,拖线1002可以由种子管212、种子管防护罩290、柄205或与种子沟槽对准的另一个附件292(诸如种子加固器)支撑。可商购的种子加固器的示例是可从precisionplanting,llc,23207townline rd,tremont,il 61568获得的 keeton种子加固器。与种子沟槽对准的另一种可商购的附件292是 furrowjet
tm
,也可从precision planting,llc获得。
59.图3是图2中所示的沟槽闭合传感器1000的放大视图。在这个实施例中,在种子加固器附件292的塑料体1004中形成腔体1006。拖线1002的后端从主体1004的后部穿过孔1008向外延伸。拖线 1002的前端可以耦接到部署在腔体1006内的器械1010(诸如应变仪、霍尔效应传感器或电位计)。由器械1010生成的信号通过信号线 1014被传送到监视器300。
60.在使用中,当行单元200向前行进时,沟槽闭合组件250的闭合轮254通过将种子沟槽10的壁一起推回到沉积的种子12和拖线 1002上方来闭合打开的种子沟槽10。当拖线1002被拉动通过闭合的种子沟槽的土壤时,器械1010测量拖线1002上的应变或施加在拖线 1002上的拉力或张力的量。应当认识到的是,如果种子沟槽10被最佳地闭合以产生种子与土壤的良好接触,那么与种子沟槽闭合不良的情况相比,器械1010将测出更大的应变、张力或拉力。同样,器械 1010可以根据拉动拖线1002穿过闭合的沟槽所需的应变、张力或拉力来检测沟槽闭合组件250是否过度压实土壤或不充分地填充土壤。
61.图4图示了沟槽闭合传感器1000a的另一个实施例。在这个实施例中,不是测量线中的拉力或张力,而是将压力换能器1012(诸如压阻或压电换能器)耦接到拖线1002的后端以测量被闭合轮组件 250推入种子沟槽10的周围的土壤施加在换能器1012上的压力。由换能器1012检测到的压力通过信号线1014被传送到监视器300。应当认识到的是,被闭合轮组件250推入种子沟槽10的土壤越多,覆盖换能器1012的土壤越多,生成越高的压力测量结
果。相反,如果闭合轮组件没有将足够量的土壤推入种子沟槽中以充分覆盖种子,那么换能器1012将测出较低的压力。
62.图5图示了沟槽闭合传感器1000b的另一个实施例,其中多根拖线1002-1、1002-2、1002-3垂直堆叠,每根拖线耦接到部署在腔体 1006内的相应器械1010-1、1010-2、1010-3(诸如应变仪、霍尔效应传感器或电位计),以提供沟槽闭合的轮廓透视图。应当认识到的是,替代于如图4中所示的三根拖线,也可以只有两根堆叠的拖线或多于三根堆叠的拖线。此外,应当认识到的是,堆叠的拖线1002中的每根拖线都可以如上所述地被配备有压力换能器,或者堆叠的线中的一根或多根可以被配备有压力传感器,而其它线被耦接到部署在腔体 1006内的器械1010。每根拖线1002可以具有与其它拖线1002相比不同的几何形状、长度或直径。对于沟槽内的不同区域,不同的几何形状或直径可以提供不同的信号响应。可替代地,代替于垂直对准,可以将多根拖线10021、1002-2、1002-3水平地堆叠(未示出),或者水平和垂直堆叠的组合(未示出)。
63.在另一个实施例中,器械1010-1、1010-2和1010-3可以分别向多根拖线1002-1、1002-2和1002-3发送电流。如果拖线1002-1、 1002-2或1002-3中的任何一根接触,那么将形成电路,然后器械 1010-1、1010-2和1010-3可以确定哪些拖线1002-1、1002-2和1002
‑ꢀ
3彼此接触。这个信息可以通过信号线1014被发送到监视器300。知道多根拖线1002-1、1002-2和1002-3是否正在接触提供了关于多根拖线1002-1、1002-2和1002-3是在感测同一位置还是不同位置的信息。当接触时,多根拖线1002-1、1002-2和1002-3正在测量同一位置,并提供另一个测量以确定沟槽是打开还是闭合。例如,如果犁沟是打开的,那么多根拖线1002-1、1002-2和1002-3将在重力作用下掉落并彼此接触。
64.图6图示了沟槽闭合传感器1000c的另一个实施例,其中多根拖线1002-1、1002-2和1002-3包括不导电材料,拖线1002-1、1002
‑ꢀ
2和1002-3的后端具有导电尖端1003-1、1003-2和1003-3。在这种实施例中,导电尖端1003-1、1003-2和1003-3通过相应的导电线 1005-1、1005-2和1005-3连接到相应的器械1010-1、1010-2和1010
‑ꢀ
3。
65.图7图示了沟槽闭合传感器1000d的另一个实施例。在这个实施例中,沟槽闭合传感器1000具有第一主体1004-1和第二主体 1004-2。第二主体1004-2可以通过任何合适的附接件(诸如紧固件、螺母和螺栓、螺钉和/或夹子)与第一主体1004-1分离。第二主体 1004-2包括在一端附接到枢轴1022的枢轴构件1020。枢轴构件 1020的另一端从附接有拖线1002的枢轴1022向下延伸。拖线1002 向后延伸通过第二主体1004-2。偏置元件1024(诸如弹簧)将枢轴构件1020朝着第一主体1004-1向前偏置。可以提供止挡件(未示出) 以防止枢转构件1020向前移动太远。在一个实施例中,在中性位置,枢转构件1020垂直于地面。发送器1026(诸如磁体)部署在枢转板 1020上。发送器1026生成由部署在第一主体1004-1中的接收器 1028(诸如霍尔效应传感器)检测到的信号(诸如磁场)。在一个实施例中,发送器1026可以部署在枢转板1020的面对第一主体1004
‑ꢀ
1的一侧上。接收器1028通过信号线1014与监视器300通信。接收器1028可以部署在电路板上,然后连接到信号线1014(诸如图13 (稍后讨论)中所示)。
66.在使用中,当拖线1002通过与土壤接触而被拉动时,枢转构件 1020将向后枢转,并且发送器1026与接收器1028之间的距离将增加并且使接收器1028测量的信号(磁场)改变。这种两件式构造的优点是,当拖线1002磨损时,只需简单地移除第二主体1004-2并用新
的第二主体1004-2替换它,就可以轻松更换拖线1002。
67.图8和图8a图示了沟槽闭合传感器1000e的另一个替代实施例。除了枢轴构件1020和枢轴1022被弹性板1030代替之外,沟槽闭合传感器1000e的实施例与沟槽闭合传感器1000d的实施例类似。发送器1026部署在弹性板1030上。在使用中,当拖线1002通过与土壤接触而被拉动时弹性板1030挠曲,并且当不施加力时返回其原始位置。如图8a中所示,弹性板1030可以具有t形形状。应当认识到的是,可以利用枢轴构件1020和枢轴1022(参见沟槽闭合传感器实施例1000d)来代替弹性板1030。
68.图9图示了沟槽闭合传感器1000f的另一个实施例。除了附接到第二主体1004-2中的弹性板1030的发送器1026被第一磁体1040 代替并且接收器1028被第一主体1004-1中的第二磁体1042和霍尔效应传感器1044代替之外,沟槽闭合传感器1000f的实施例与沟槽闭合传感器1000e的实施例类似。第一磁体1040和第二磁体1042 被布置为使得相同的磁极(n-n或s-s)朝着彼此定向。霍尔效应传感器1044被部署为与第一磁体1040和第二磁体1042等距,使得在这个中间点处测得的场为零。具有这种构造的好处是,与仅有一半电压范围可用于读取远处到无穷远处的磁场相比,霍尔效应传感器 1044的整个电压范围可用于测量压缩空间中的磁场。应当认识到的是,可以利用枢轴构件1020和枢轴1022(参见沟槽闭合传感器实施例1000d)来代替弹性板1030。
69.取决于霍尔效应传感器(1028、1044或1010)的强度,测量少量阻力会受到地球磁场和行进方向的影响。霍尔效应传感器(1028、 1044或1010)相对于地球磁场的朝向会导致霍尔效应传感器(1028、 1044或1010)测出较大或较小的力。为了补偿,如图1中所示,可以在行单元200上部署参考传感器1101,用于在没有用霍尔效应传感器(1028、1044或1010)测量的力的情况下测量地球磁场,或者可替代地,参考传感器1101可以部署在工具栏202或农业机具(未示出)的其它部件上。参考传感器1101可以是霍尔效应传感器、磁力计、指南针或测量磁场的任何器械。来自霍尔效应传感器(1028、 1044或1010)的测量值可以与参考传感器1101进行比较,以确定由霍尔效应传感器(1028、1044或1010)测量的实际力。可替代地,参考传感器1101可以根据农业机具的位置从gps位置和行进方向 (诸如用gps 310)得到地球的磁场,而不是实际测量地球的磁场。可以基于机具的位置和行进方向从数据库中引用地球磁场。
70.还应当认识到的是,沟槽闭合传感器1000-1000f的任何实施例都可以包括单个主体1004(如图3-6中所示)或如图7-9中所示的两件式主体1004-1、1004-2。
71.此外,如图10中所示,本文所述的任何拖线1002都可以制成两部分,其中拖线基部10021和可更换拖线1002-2在可分离的连接部 1050处连接,这允许如果拖线磨损可更容易地更换拖线。
72.参考图11,在沟槽闭合传感器1000-1000f的任何实施例中使用的拖线1002可以设有由与拖线1002的材料相比而言耐磨性增加的任何材料制成的磨损保护器1052。在一个实施例中,磨损保护器1052 由碳化钨制成。但是,由于碳化钨可能是脆性的,因此沿着拖线 1002的长度以多段方式施加磨损保护剂。但是,应当认识到的是,磨损保护器1052可以是单个连续件,而不是如图11中所示的多个单独的磨损保护件。无论是单件还是多件,磨损保护件1052都可以覆盖拖线1002的0至100%,或者从加固器主体延伸的拖线1002的磨损保护器1052覆盖的百分比可以是40%至60%、约50%、大于90%或95-99%。
73.在如图12中所示的又一个实施例中,其可应用于先前描述的沟槽闭合传感器1000-1000f的所有实施例,拖线1002不是笔直的,替代地,拖线1002可以以蛇形构造弯曲或成曲线,从沟槽10的侧壁到侧壁延伸。在这种实施例中,蛇形线1002可以装备有弯曲传感器 1010,使得当沟槽在蛇形拖线的上方闭合时,随着拖线被拉过土壤而使拖线变直,可以获得比使用直线更准确的测量。此外,线可以是线圈(未示出)的形式而不是蜿蜒的线,以检测在所有三个维度上作用的力。
74.可以提供参考传感器1100(图2、图13和图14)以“校准”沟槽闭合传感器1000-1000f,以考虑可能影响土壤的阻力系数特性的条件,包括诸如种植机速度、沟槽深度、土壤质地、土壤湿度和土壤密度之类的因素。如在图13和图14中最佳示出的,参考传感器 1100包括拖动构件1102,该拖动构件1102被部署为拖动穿过种子沟槽10外部的土壤。如图2中所示,参考传感器1100可以部署在沟槽打开组件220的前方,或者拖动构件1102可以安装在行单元200 (未示出)之间。拖动构件1102由臂1104支撑,该臂1104相对于量规轮1106可调整地定位,以改变拖动构件1102相对于土壤表面的穿透深度。臂1104装备有应变仪1110,以检测当拖动构件1102拖动穿过土壤时施加在臂1104上的应变。信号线1114将应变仪1110 中的电阻变化传输到监视器300。监视器300被编程为将电阻变化与臂1104中检测到的应变相关联,然后可以将其与拖线传感器1000
‑ꢀ
1000f生成的信号相关联,以限定如果种子沟槽被沟槽闭合组件250 充分闭合那么沟槽闭合传感器1000-1000f应当检测到的力、张力或压力的范围。
75.在其它实施例中,参考传感器1100可以是行单元200的穿透力。如图2中所示,可以利用部署在开口盘主轴225处的力传感器223 (诸如应变仪)直接测量穿透力。行单元200的穿透力还可以通过从由下压力控制系统214施加的力和行单元200的质量中减去由下压力传感器238测得的量规轮力来确定。
76.在其它实施例中,参考传感器1100可以使用电导率传感器370 和反射率传感器350测得的土壤的电导率或反射率,如结合以下讨论的图18所述。
77.在另一个实施例中,参考传感器1100可以基于gps位置的地理空间土壤类型信息,诸如usda ssurgo数据,其在改变田地中的区时可以是有用的。田地中的每个区的数据都可以作为参考。
78.如图15中所示,替代性参考传感器1100a包括犁刀臂1200,犁刀臂1200附接到行单元200,犁刀1202附接到具有轮轴1203的犁刀臂1200。在轮轴1203处,力传感器1204(诸如下压力传感器238) 测量犁刀1202传输到轮轴1203的力。力传感器1204与监视器300 进行数据通信。
79.如图16中所示,替代传感器1100b包括安装到行单元200(或可替代地工具栏202)的臂1300,并且在臂1300的相对端处有支架 1302。犁刀臂1303可枢转地安装到支架1302,并且施力设备1304 (诸如弹簧)被部署为将犁刀臂1303连接到支架1302,以向犁刀臂 1303施加固定的力。可替代地,施力设备可以是气动设备、液压设备、机电设备或电动液压设备。犁刀1308滚动地安装到犁刀臂1303。量规轮臂1305可枢转地连接到犁刀臂1303,并且量规轮1307滚动地安装到量规轮臂1305。角度传感器1306部署在量规轮臂1305和犁刀臂1303之间的枢转连接处。角度传感器1306的示例包括但不限于旋转电位计或霍尔效应传感器。角度传感器1306与监视器300进行数据通信。在这个实施例中,施力设备1304向犁刀1308施加
已知的力。随着土壤硬度的改变,量规臂1305将旋转,而角度传感器 1306测量旋转的量。
80.可以与拖线传感器1000-1000f结合使用的另一种参考传感器是行单元200的速度。随着行进速度的改变,测得的力、张力或压力将随速度的改变而直接改变。行单元200的速度可以由任何合适的设备 (诸如拖拉机上的速度计(拖拉机轮速度)、gps距离随时间的改变或地速雷达)来确定。这些设备中的任何一个都可以与监视器300 进行数据通信。
81.b.压力感测
82.(1)流体管拖线
83.在又一个替代实施例中,沟槽闭合传感器1000-1000f的任何实施例都可以利用流体管拖线代替金属、绳或其它材料。在这种实施例中,流体管拖线1002可以填充有流体(气体或液体)并且连接到压力传感器器械1010,但是先前实施例1000-1000f的所有其它特征保持不变。在使用中,当土壤覆盖流体管拖线1002时,流体管将压缩,导致流体管中的压力增加,该压力由压力传感器器械1010测量。在一个实施例中,流体管拖线1002不是纵向可伸长的(即,与行进方向一致地前后延伸),使得由伸长引起的任何压力改变被最小化或消除。在这种实施例中,流体管可以具有不伸长的刚性侧。在一个实施例中,流体管拖线1002的圆周/周界的至少20%或至少25%是刚性的,并且其余部分是可压缩的。在横截面中,流体管拖线1002可以是圆形的,或者可以是正方形或多边形的,并且可以具有一个、两个或三个刚性侧。
84.(2)压力感测鼓
85.图17和图17a图示了沟槽闭合传感器3000的实施例,其中种子加固器290包括固定在加固器主体内的压力感测鼓3010,如从图 17a的前视图最好地看到的,鼓头部3012向外鼓出。鼓头部3012可以一起移动或独立移动。压力传感器(未示出)可以部署在鼓3010 内,以测量当土壤被闭合轮组件250的闭合轮254推入沟槽10时土壤对鼓头部3012施加的压力。应当认识到的是,如果沟槽10被最佳地闭合以产生种子与土壤的良好接触,那么压力感测鼓3010将测出比如果种子沟槽不良地闭合的情况下更大的压力。同样,压力感测鼓 3010可以根据被闭合轮压在一起的土壤的测得的压力或测得的反作用力来检测沟槽闭合组件250是否过度压实了土壤或未充分填充土壤。此外,压力感测鼓3010可以感测闭合轮穿透到土壤中,由此可以推断出沟槽闭合。应当认识到的是,在这种实施例中,加固器292可能需要被拉长,使得加固器主体比常规的keeton加固器(如上面所引用的)更加朝着闭合轮向后延伸,使得鼓3010被定位成测量由闭合轮254闭合沟槽10处的土壤施加的压力。压力感测鼓3010可以被结合到上述沟槽闭合传感器1000-1000f的任何实施例中。
86.c.土壤特点感测
87.图18图示了一个实施例,其中沟槽闭合传感器1000-1000f的任何先前描述的实施例都包括沿着加固器的主体1004部署的其它传感器。这些其它传感器可以包括反射率传感器350a和350b、温度传感器360以及电导率传感器370f和370r,诸如在通过引用并入本文的国际公开no.wo2015/171908中公开的。这些其它传感器350、360、 370被示为经由无线发送器62-1与监视器300进行数据通信。可以提供公耦接器472和母耦接器474,公耦接器472和母耦接器474使得能够将包含传感器和器械的加固器主体的可分离部分492从加固器附件292的主体1004上分离。在加固器内部定向为面朝后的相机 400也可以部署在加固器中。
88.图19-19a图示了沟槽传感器4000的另一个实施例,其中种子加固器附件292包括
以垂直关系部署在加固器的主体1004上的传感器 4010。传感器4010可以是上述参考传感器中的任何一个,并且垂直定向的传感器4010可以被结合到任何先前描述的拖线沟槽闭合传感器1000-1000f中。
89.(1)感测沟槽侧壁的光滑度或编织(knitting)
90.沟槽侧壁的光滑度或破裂的侧壁或编织的检测可预示沟槽在被闭合轮闭合后重新打开的风险。以下传感器可以被用于检测侧壁的光滑度:与侧壁的垂直横截面成一定角度部署的gpr;lidar;飞行时间相机;微型渗透仪;或电导率传感器。此外,相机400可以提供侧壁断裂或编织的视觉指示。
91.(2)感测沟槽土壤密度
92.沟槽内的土壤密度会影响种子埋入的深度。如图18中所示,土壤密度可以由部署在加固器主体1004中的电导率或电感传感器370 确定。可替代地,可以使用gpr和公共中点(“cmp”)分析来确定土壤密度。
93.(3)感测沟槽土壤湿度
94.如图18所示,可以通过部署在加固器中的导电传感器370来检测土壤的湿度。可替代地,器械1010可以耦接到适于用作电导率传感器的拖线1002,从而在拖线被拉动穿过沟槽时检测种子水平处的土壤湿度。
95.(4)感测沟槽干泥土进入
96.如前所述,可以通过拖线1002中的电导率或电感传感器来检测干泥土进入土壤沟槽。可替代地,可以通过相机400以及土壤的颜色视觉地检测干泥土进入。
97.(5)感测电导率
98.图20-21图示了适于感测电导率的沟槽传感器5000的另一个实施例,其中附件292被示为如先前所引用的并且如先前通过引用整体并入本文的国际公开no.wo2016/205424中所公开的furrowjet
tm
。虽然沟槽传感器5000被示为在furrowjet
tm
中实施,但是应当认识到的是,任何附件,包括如前所述的keeton种子加固器,都可以用于沟槽传感器5000。在图20中,沟槽传感器5000包括经由支架 5010安装到行单元200的附件292,该支架5010可以包括前支架 5012和后支架5014。附件292包括向外散布的翼构件5020-1、5020
‑ꢀ
2,每个翼构件具有电导体传感器5022-1、5022-2。附件292还包括带有电导率传感器5100的器械化拖线1002。附件292可以包括与液体产品源(未示出)连通的一个或多个液体放置管5030、5032。液体注射针5040-1、5040-2(图21)可以延伸通过相应的翼构件5020
‑ꢀ
1、5020-2,以将经由液体管5030、5032传送的液体产品注射到沟槽的相应侧壁中(参见图21)。测量由电导率传感器5022-1、5022-2 测量的沟槽侧壁的电导率,并将其与由部署在拖线1002上的电导率传感器5100测量的闭合沟槽的电导率进行比较。通过在大致相同的深度和大致相同的位置处进行测量,可以更准确地测量沟槽的闭合。为了进一步改善测量,可以通过电导率传感器5022-1、5022-2测量左右沟槽壁以提供左右读数,其被用作拖线电导率传感器5100所获取的读数的参考。在一个实施例中,电导率传感器5022-1和5022-2 可以通过部署在电导率传感器5022-1、5022-2以及翼构件5020-1、 5020-2之间的绝缘体(未示出)分别与翼构件5020-1、5020-2绝缘,从而允许更直接地读取沟槽侧壁,而不必考虑流经注射针5040-1、 5040-2的流体(诸如盐溶液)所产生的电导率。
99.d.感应对准和种子反弹(kicking)
100.图22是沟槽传感器6000的实施例,沟槽传感器6000具有部署在加固器主体的相对侧上的相对的电探针6010,其可以用于检测加固器在沟槽内的对准。在这种实施例中,电探针可以向操作者提供二元反馈(例如,是/否与侧壁接触)或指示由侧壁施加在电探针上的负载的反馈,其中在加固器的一侧上的大的负载将指示加固器是否与种子沟槽中心不对准。可以将电探针6010结合到任何先前描述的拖线沟槽闭合传感器1000-1000f中。
101.可替代地,提供种子沟槽的后视视图的相机400可以为操作者提供犁沟几何形状以及在沟槽的底部内的加固器292的对准的视觉指示。此外,如果将尖刺轮用于闭合轮254,那么相机可以提供如果尖刺轮将种子不希望地从种子沟槽的底部反弹则需要调整尖刺轮的视觉指示。
102.e.其它闭合传感器
103.在另一个实施例中,相机400可以查看沟槽闭合传感器1000
‑ꢀ
1000f后面的区域,以查看沟槽闭合传感器1000-1000f后面和沟槽中的沟槽闭合组件250下方的闭合量。图像可以显示在监视器300上。
104.在图39中所示的另一个实施例中,附件292可以包括部署在附件292的端部293处的沟槽闭合传感器1000g,以感测附件292后面的沟槽和沟槽中沟槽闭合组件250下方。沟槽闭合传感器1000g包括发送器1090和接收器1091。虽然示出了将发送器1090部署在接收器1091上方,但是接收器1091可以部署在发送器1090上方。可替代地,发送器1090和接收器1091可以是单个收发器。沟槽闭合传感器1000g可以是光/反射率、雷达、声纳、超声或lidar。对于雷达、声纳、超声或lidar,测量从附件292到沟槽的闭合部分的距离。已知沟槽闭合组件250相对于附件292的位置,存在沟槽应当被闭合的预期距离。如果测得的距离与预期距离不同,那么可以在监视器300上显示警报和/或可以将该距离的偏差与从gps获得的地理参考坐标相关联,并且可以对该偏差进行映射。作为示例,如果距离符合预期,那么位置可以被显示为绿色,并且如果距离不符合预期,那么位置可以被显示为红色。
105.ii.其它沟槽外传感器
106.a.工作层成像
107.参考图2,工作层传感器100(诸如在通过引用整体并入本文的 pct申请no.pct/us2016/031201中公开的)可以被部署在行单元 200上,以生成代表整个感兴趣的土壤区域(下文中被称为“工作层
”ꢀ
104)中的土壤密度或其它土壤特点的信号或图像。工作层传感器 100可以确定闭合沟槽的有效性以识别在闭合的沟槽中是否存在任何空隙空间或土壤密度改变。工作层传感器可以与沟槽闭合传感器 1000-1000f结合使用。
108.图23、图25和图27示意性地图示了工作层传感器100的替代实施例。由工作层传感器100生成的代表性图像或信号在下文中被称为“工作层图像”110。在稍后讨论的一个特定应用中,工作层传感器100可以被安装到种植机行单元200(图1),以在种植机横越田地时生成种子沟槽的工作层图像110。工作层图像110可以显示在拖拉机的驾驶室内的操作者可见的监视器300上,并且种植机可以配备有各种致动器,用于基于从工作层图像110确定的工作层104的特点来控制种植机。
109.用于生成工作层图像110的工作层传感器100可以包括地面穿透雷达系统、超声系统、可听范围的声音系统、电流系统或用于通过工作层104生成电磁场102以产生工作层图像110的任何其它合适的系统。应当理解的是,工作层104的深度和宽度可以根据农业机具
和所执行的操作而变化。
110.图23是相对于由种植机在土壤11中形成的种子沟槽10部署的工作层传感器100-1的一个实施例的示意图,其中种子沟槽10包括感兴趣的土壤区域或工作层104。在这个实施例中,工作层传感器 100-1包括部署在种子沟槽10的一侧的发送器(t1)和部署在种子沟槽10的另一侧的接收器(r1),以通过种子沟槽生成电磁场102,以生成工作层图像110。
111.在一些实施例中,工作层传感器100可以包括地面穿透雷达地下检查系统,诸如以下任何可商购的系统:(1)可从nashua,newhampshire的gssi获得的structurescan
tm mini hr;(2)耦接到 3d-radar vx系列和/或dx系列多通道天线的3d-radar geoscope
tm mk iv,均可从挪威trondheim的3d-radar as获得;或(3) mala成像雷达阵列系统,可从瑞典mala的mala geoscience获得。在此类实施例中,可商购的系统可以安装到种植机或其它机具,或者可以安装到随机具一起移动的推车;在任一种情况下,该系统都优选地被部署为捕获感兴趣区域(例如,种子沟槽)中的工作层的图像。在一些实施例中,工作层图像110可以使用可商购的软件根据工作层传感器100的信号输出生成,该软件诸如可从位于德国borken 的geohires international ltd.获得的gpr-slice(例如,版本 7.0)。在另一个实施例中,任何地面穿透雷达都可以被聚焦在表面上并以任何所述配置使用的雷达代替。
112.图24a-24c旨在作为由图23的工作层传感器100-1生成的工作层图像110的代表性示例,其示出了种子沟槽10的各种特点,包括例如沟槽深度、沟槽形状、种子12的深度、相对于沟槽深度的种子深度、沟槽中的农作物残余物14以及沟槽内的空隙空间16。如稍后更详细地描述的,工作层图像110可以被用于确定工作层104的其它特点,包括例如种子与土壤的接触、沟槽闭合的百分比、沟槽的上半部分闭合的百分比、沟槽的下半部分闭合的百分比、土壤湿度等。
113.图25以平面图示意性地图示了相对于种子沟槽10部署的工作层传感器100-2的另一个实施例。在这个实施例中,发送器(t1)部署在种子沟槽10的一侧,第一接收器(r1)部署在种子沟槽10的另一侧,并且第二接收器(r2)与发送器(t1)相邻并向后部署。图 26a是通过发送器(t1)和第一接收器(r1)之间的沟槽生成的工作层图像110的代表性图示,并且图26b是在发送器(t1)和第二接收器(r2)之间生成的工作层图像110的代表性图示,提供了与种子沟槽相邻的未被扰动的土壤的图像。
114.图27是示意性图示相对于种子沟槽10部署的另一个工作层传感器实施例100-3的正视图。在这个实施例中,工作层传感器100-3包括部署在种子沟槽10上方并且横向于种子沟槽10部署的多个发送器和接收器对。
115.图28是由图27的工作层传感器100-3生成的工作层图像110的代表性图示,其不仅提供了种子沟槽的视图,而且还提供了与种子沟槽的每一侧相邻的土壤的一部分的视图。
116.对于每个工作层传感器实施例100-1、100-2、100-3,工作层传感器100的操作频率以及发送器(t)和接收器(r)在土壤上方的垂直位置以及发送器(t)与接收器(r)之间的间隔被选择为使信噪比最小化,同时还捕获为其生成工作层图像110的感兴趣的土壤区域(工作层104)的期望深度和宽度。
117.图1图示了部署在农业种植机的行单元200上的工作层传感器 100的特定应用的一个示例。行单元200包括部署在行单元200的前端上的工作层传感器100a和部署在行单元200的后端上的工作层传感器100b。前工作层传感器100a和后工作层传感器100b可以包括
先前描述的工作层传感器100-1、100-2、100-3的任何实施例。
118.前工作层传感器100a被部署为在土壤受到种植机扰动之前生成土壤的参考工作层图像(下文中称为“参考层图像”)110a,而后工作层传感器100b生成工作层图像图110b,在这个示例中是其中种子已经被沉积并被土壤覆盖的闭合种子沟槽10的图像。出于稍后解释的原因,期望获得参考图像110a和工作层图像110b两者,以通过工作层104来分析土壤特点。
119.应当认识到的是,图1中引用的前工作层传感器100a和后工作层传感器100b可以采用前述实施例100-1、100-2或100-3中的任何一个。但是,应当理解的是,如果采用实施例100-2或100-3,那么可以省去前工作层传感器100a,因为实施例100-2和100-3被配置为生成与种子沟槽10相邻的未被扰动的土壤的工作层图像110,其可以用作参考层图像110a。
120.应当认识到的是,替代于如图1所示那样放置工作层传感器100,可以将工作层传感器放置在行清洁器组件270之后并且在沟槽打开组件220之前,或者在沟槽打开盘222和闭合轮254或压实轮264之间的一个或多个其它位置,这取决于土壤区域或感兴趣的特点。
121.图29是系统600的示意图,该系统采用工作层传感器100来提供操作者反馈并控制种植机行单元200。工作层传感器100a、100b 被部署为生成未被扰动的土壤的参考层图像110a和闭合种子沟槽 (即,在沉积种子之后,通过闭合轮组件250用土壤覆盖并且用压实轮组件260压紧土壤)的工作层图像110b。如前所述,工作层传感器100a、100b可以是如图1所示部署在行单元200前方、后方的单独的工作层传感器,或者工作层传感器100a、100b可以包括带有发送器(t)和接收器(r)的、被部署为生成参考层图像110a和工作层图像110b两者的单个工作层传感器。
122.工作层图像110b可以被传送并且在拖拉机的驾驶室中在包括显示器、控制器和诸如图形用户界面(gui)的用户界面的监视器300 上显示给操作者。
123.监视器300可以与gps单元310、行清洁器致动器276、下压力控制系统214、深度调整致动器234、沟槽闭合组件致动器256和压实轮组件致动器266进行信号通信,从而基于工作层图像110b的特点实现对种植机的操作控制。
124.例如,如果工作层图像110b指示种子沟槽10中的残余物高于预定阈值(如下面所解释的),那么监视器300生成信号以致动行清洁器致动器276以增加行清洁器下压力。作为另一个示例,如果种子深度小于预定阈值(如下所述),那么监视器300生成信号以致动下压力控制系统214以增加下压力和/或致动深度调整致动器234以相对于开口盘232调整量规轮234以增加沟槽深度。同样,如果种子深度大于预定阈值,那么监视器300生成信号以致动下压力控制系统 214以减小下压力和/或致动深度调整致动器234以减小沟槽深度。作为另一个示例,如果沟槽的上部具有大于阈值水平的空隙空间(如下面所解释的),那么监视器300生成信号以致动沟槽闭合轮组件致动器256,以增加闭合轮254上的下压力。作为另一个示例,如果沟槽的下部具有大于阈值水平的空隙空间(如下所述),那么监视器300 生成信号以致动压实轮组件致动器266以增加压实轮上的下压力264。
125.在其它示例中,工作层图像110b可以识别和/或分析感兴趣的地下特征(诸如瓷砖线条、大块岩石或由于耕作和其它田地运输产生的压实层)(例如确定其深度、面积、体积、密度或其它质量或数量)。此类地下特征可以在监视器300上显示给用户和/或由监视器300使用图像特性和预期在田地中遇到的地下特征集合之间的经验相关性识别。在一个这样的
示例中,可以分析种植机(或拖拉机或其它机具或车辆)的量规轮(或其它轮)所遍历的区域,以确定轮下方的压实层的深度和/或土壤密度。在一些这样的示例中,可以基于此类子区域中的预期地下特征而将工作层图像的区域划分为用于分析的子区域 (例如,可以对量规轮横越的区域针对压实进行分析)。
126.在其它示例中,监视器300可以基于工作层图像110b的图像特性来估计土壤特性(例如,土壤湿度、有机物或电导率、地下水位),并将土壤特性作为数值(例如,平均值或当前值)或者与每个土壤特性测量结果相关联的田地中的地理参考位置处(例如,通过将测量结果与gps单元310报告的并发地理参考位置相关联)的土壤特性的空间图显示给用户。
127.可替代地或附加地,监视器300可以被编程为基于工作层图像 110b的特点来显示操作建议。例如,基于由种子传感器生成的信号或种子计量器的速度,如果工作层图像110b识别出种子12在沟槽 10中不规则地间隔开,或者如果种子12没有均匀地沉积在沟槽的底部中,或者如果种子12在沟槽中的间隔确实与种子的预期间隔不匹配,那么这种不规则间隔、不均匀定位或其它与预期间隔的不一致性可能是由于过快的速度导致沟槽内的种子反弹或行单元的垂直加速度过大。照此,监视器300可以被编程为建议降低种植速度或建议增加下压力(如果没有如前所述自动控制)以降低种植机行单元的垂直加速度。同样,就其它致动器276、214、234、256、266不与监视器控制器集成的程度而言,监视器可以被编程为向操作者显示推荐,以便如前所述基于工作层图像110b的特点进行手动或远程调整。
128.图30图示了用于控制种植机和提供操作者反馈的过程步骤。在步骤610和612处,参考图像110a和工作层图像110b由(一个或多个)工作图像传感器100生成。在步骤614处,工作层图像110b 可以在拖拉机的驾驶室中的监视器300上显示给操作者。在步骤616 处,将参考层图像110a与工作层图像110b进行比较以表征工作层图像。在步骤618处,将表征的工作层图像110b与预定阈值进行比较。在步骤620处,基于表征的工作层图像110b与预定阈值的比较来做出控制决定。在步骤622处,种植机部件可以由监视器300控制,从而生成信号以致动对应的致动器276、214、234、256、266中的一个或多个,和/或在步骤624处,可以在监视器显示器上向操作者显示对应的建议。
129.为了在步骤616处表征工作层图像110b,监视器300将参考图像110a的一个或多个特点(例如,密度)与工作层图像110b的相同特点进行比较。在一些实施例中,可以生成表征的图像,该表征的图像仅包括工作层图像的与参考图像相差达到至少阈值的部分。然后,表征的图像可以被用于识别和限定工作层图像110b的特征,诸如沟槽形状、沟槽深度、沟槽中的残余物、沟槽中的种子和种子放置、沟槽中的空隙空间,以及沟槽内土壤的密度差异。
130.例如,为了确定种子深度,通过确定工作层图像内的具有与种子对应的尺寸或形状并且具有在经验上与种子对应的密度范围的区域来从工作层图像110b中识别出或可识别种子。
131.一旦将区域识别为种子,就可以轻松地测量或确定种子相对于土壤表面的垂直位置。
132.作为另一个示例,可以通过以下来确定沟槽中的残余物的量: (a)限定沟槽横截面的面积(基于参考图像110a与工作层图像 110b之间的土壤密度差);(b)通过识别沟槽内的具有在经验上与残余物对应的密度范围的区域;(c)总计与残余物对应的区域的面积;(d)将残余物面积除以沟槽横截面积。
133.b.水平传感器
134.如图31中所示,可以提供水平传感器7000,以确定在用闭合轮闭合沟槽之后土壤的水平度以及行之间的土壤的水平度。水平传感器 7000可以是包括支撑在一个或多个臂上的弹簧钢丝的接触传感器,该臂在弹簧钢丝在闭合轮的后面或在行之间在土壤的顶部上方拖动时测量弹簧钢丝的位移。可替代地,接触水平传感器可以包括链,该链在闭合轮的后面或在行之间在土壤的顶部上方拖动,其中传感器确定拖力的变化。可替代地,接触传感器可以包括襟翼(flap),该襟翼在闭合轮的后面或在行之间在土壤的顶部上方拖动,其中测量襟翼的弯曲的形状或量。可替代地,可以将加速度计部署在襟翼上以测量土壤的水平度。代替于接触传感器,水平传感器7000可以包括非接触传感器,诸如lidar、飞行时间相机、gpr或声纳可以部署在闭合轮的后面并且在行之间。
135.c.抛土传感器
136.图32图示了抛土传感器8000的实施例,该传感器8000用于通过测量是否有任何土壤从闭合的沟槽被抛出来测量沟槽被闭合的程度。类似于机动船在水中行驶时抛出的“公鸡尾巴”,可以测量闭合系统抛出的土壤量。在图32的实施例中,抛土传感器8000包括附接到沟槽闭合组件250的背面的板8002。板8002具有力传感器8004,用于测量抛出的土壤对板8002的撞击。可以适用于抛土传感器8000的力传感器8004的示例是美国专利公开no.us2014/0174199中公开的谷物撞击传感器,其通过引用整体并入本文。
137.图33图示了抛土传感器8000a的另一个实施例。在这个实施例中,抛土传感器8000a具有附接到沟槽闭合组件250的背面的臂 8010。一对光束传感器8012-1和8012-2部署在臂8010上。在光束传感器8012-1和8012-2之间发送和接收光束(例如,光或超声),一个至少是发送器,一个至少是接收器。光束传感器8012-1和8012
‑ꢀ
2可以都是发送器和接收器,并且可以使用不同的频率。在另一个实施例中(未示出),可将抛土传感器8000、8000a安装在其它农业设备(诸如耕种单元)上,以测量由农业装备抛出的土壤。
138.d.沟槽深度传感器
139.图34图示了沟槽深度传感器系统2000的实施例。沟槽深度传感器系统2000具有沟槽传感器2010和地面传感器2020之一或两者。沟槽传感器2010和地面传感器2020可以是超声或雷达传感器。沟槽传感器2010在行进方向上部署在打开组件220之后的闭合系统250 上,以感测到种子沟槽10底部的距离。地面传感器2020在行进方向上部署在沟槽传感器2010之后的行单元200上,以感测到土壤表面 1的距离。沟槽传感器2010和地面传感器2020都与闭合轮254的底部有固定距离,并且都与监视器300通信。闭合轮254在土壤中的深度(hg)可以通过从地面传感器2020到闭合轮254的底部的距离减去由地面传感器2020测得的距离来确定。闭合轮254在种子沟槽10 的底部上方的距离(hf)可以通过从沟槽传感器2010测得的距离减去沟槽传感器2010到闭合轮254的底部的距离来确定。这些测量中的一个或两个也可以与沟槽闭合传感器1000-1000f的测量组合使用,以确定闭合效果。沟槽传感器2010和地面传感器2020可以各自独立地是超声传感器、雷达或激光器。
140.e.闭合组件角度传感器
141.在如图35中所示的另一个实施例中,角度传感器2280可以部署在闭合轮臂252和框架204的连接处,并且角度传感器2280与监视器300通信。角度传感器2280可以与wo2014/066650中的枢转臂角度传感器280相同。角度传感器2280的角度输出可以与沟槽闭合传感
器1000-1000f的测量组合,以确定种子沟槽的闭合效率。角度传感器2280的示例包括但不限于旋转电位计和霍尔效应传感器。
142.iii.种植机控制和操作者反馈
143.由沟槽内传感器1000-1000f,3000、4000、5000、6000或沟槽外传感器100、2000、2280、7000、8000生成的信号可以通过信号线 1014或其它有线或无线通信作为实际测量结果传送给监视器300,或者监视器300可以被编程为转换并在监视器屏幕上显示由传感器 1000-1000f测得的实际力、张力或压力或者由传感器3000、4000、 5000、6000或传感器100、2000、2280、7000、8000测得的其它沟槽特点。如果期望的显示的力或其它沟槽特点在期望的范围之外,那么可以调整闭合轮254上的下压力。可以通过调整常规线圈弹簧的位置(与离散的预加载设置对应)来手动调整闭合轮下压力的调整。可替代地,如果闭合轮组件250配备有如前所述的沟槽闭合轮组件致动器256,那么操作者可以根据需要手动地致动沟槽闭合轮组件致动器 256,以增加或减小由闭合轮254施加的下压力以将沟槽闭合传感器1000-1000f测得的力保持在期望范围内,或将由其它传感器100、 2000、2280、3000、4000、5000、6000、7000、8000测得的其它特点保持在期望范围内。可替代地,取决于沟槽闭合传感器1000
‑ꢀ
1000f是否检测到(一根或多根)拖线1002上的力、张力或压力降至低于或超过预定义的最小和最大阈值力,或者如果其它特点不在由其它传感器100、2000、2280、3000、4000、5000、6000、7000、 8000测得的期望范围内,那么监视器300可以被编程为自动地致动沟槽闭合轮组件致动器256以增加或减小闭合轮254上的下压力。在又一个实施例中,替代于经由常规的线圈弹簧或致动器来调整闭合轮组件250上的下压力,可以调整闭合轮的角度以增加或减小闭合轮的侵略性。例如,如本领域中已知的,可以提供致动器或机械调整(未示出)以减小或增大闭合轮相对于行进方向或相对于垂直方向的角度,由此调整闭合轮推入种子沟槽的土壤的量。如果提供了闭合轮角度致动器来调整闭合轮角度,那么操作者可以手动地致动致动器,或者监视器300可以被编程为根据由沟槽闭合传感器1000-1000f检测到的力或者由其它沟槽内传感器3000、4000、5000或其它沟槽外传感器 100、2000、2080、6000、7000检测到的其它特点来自动地致动致动器以调整闭合轮的侵略性。
144.图36图示了可以如何调整闭合轮的外倾角,以使得穿过闭合轮 254-1和254-2的轴线a-1和a-2与沟槽10中的种子12相交。上述工作层传感器可以被用于将种子12定位在沟槽10中。闭合系统250 相对于任何工作层传感器的位置是已知的,并且闭合轮254-1和254
‑ꢀ
2可以由致动器259调整以调整闭合轮254-1和254-2的外倾角。可替代地,可以调整外倾角以与沟槽10的底部相交。在某些实施例中,可以假设种子12在沟槽10的底部。可以通过确定沟槽10的深度的任何器械来确定沟槽10的底部。可以确定沟槽10的深度的器械的非限制性示例在cn101080968、cn201072894、de102004011302、 jp0614628、jp2069104、jp04360604、jp08168301、jp2001299010、jp2006345805、us4413685、us4775940、us5060205、us6216795、 us8909436、us20150289438、us20160037709、wo2012102667、 wo2015169323和国际申请no.pct/us2017/043565中公开,所有这些都关于所公开的距离/深度确定主题而通过引用并入本文。然后可以通过假设沟槽位于闭合轮254-1和254-2之间的中心来确定角度。在图36的实施例中,闭合系统250包括闭合框架构件253。闭合轮 254-1和254-2分别附接到轮轴255-1和255-2。轮轴255-1和255-2 分别连接到轮轴臂257-1和257-2,轮轴臂257-1和257-2分别可枢转地连接到框架构件253和致动器臂258-1和258-2,致动器臂258-1 和258-2分别
可枢转地连接到致动器259。致动器259与监视器300 通信,其中致动器259接收信号进行旋转,这使得致动器臂258-1和 258-2移动得离闭合框架253的中心更近或更远,以使轮轴臂257-1 和257-2相对于闭合框架构件253的角度改变,这进而改变闭合轮 254-1和254-2的外倾角。虽然示为具有一个致动器259,但是可以存在两个致动器259-1和259-2,其中,轮轴臂258-1连接到致动器 259-1,而轮轴臂258-2连接到致动器259-2,以允许独立地调整闭合轮254-1和254-2的外倾角(未示出)。
145.可替代地或附加地,可以基于由(一根或多根)拖线1002检测到的张力、拉力或压力来调整压实轮组件260。可以通过调整常规线圈弹簧的位置(与离散的预加载设置对应)来手动调整压实轮下压力的调整,或者,如果压实轮组件260配备有如上所述的致动器266,那么操作者可以手动致动致动器266或者监视器300可以被编程为自动致动致动器266以增加或减小施加在压实轮264上的下压力的量,以将由沟槽闭合传感器1000-1000f测得的力、张力或压力保持在期望范围内或将其它沟槽特点保持在期望范围内。
146.图37和38是系统500的示意图,该系统采用沟槽闭合传感器 1000-1000f和参考传感器1100-1100b来提供操作者反馈并控制种植机行单元200的闭合轮组件250和压实轮组件260。在步骤510和512处,参考传感器1100(经由应变仪1110)检测施加在臂1104上的应变。在步骤512处,使施加在臂1104上的应变相关联,以限定如果种子沟槽被沟槽闭合组件250充分闭合应当检测到的力、张力或压力的范围。在步骤514处,沟槽闭合传感器1000-1000f检测土壤在(一根或多根)拖线1002上施加的力、张力或压力。在步骤516 处,可以将土壤施加在沟槽闭合传感器1000-1000f的(一根或多根) 拖线1002上的力、张力或压力与如果种子沟槽被沟槽闭合组件250 充分闭合那么沟槽闭合传感器1000-1000f应当检测到的力、张力或压力的相关范围相关联地在拖拉机驾驶室中的监视器300上显示给操作者。在步骤518处,基于表征的范围与由沟槽闭合传感器1000
‑ꢀ
1000f检测到的力、张力或压力的比较来做出控制决定。在步骤520 处,闭合轮组件250或压实轮组件260可以由监视器300控制,从而生成信号以致动对应的致动器256、266中的一个或多个,和/或在步骤522处,可以在监视器显示器上向操作者显示对应的建议。
147.上面已经描述了本发明的各种实施例,以说明其细节,并使本领域普通技术人员能够实现和使用本发明。所公开的实施例的细节和特征并非旨在进行限制,因为许多变化和修改对于本领域技术人员而言将是清楚的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1