一种智能化的采茶机器人
1.本发明涉及农业机械设备技术领域,具体涉及一种智能化的采茶机器人。
背景技术:
2.我国是茶叶产业大国,种植茶树带来经济效益使得许多乡村家庭收入增加。茶叶也是一种非常常见的日用品,喝茶成了人们生活中一种重要的消遣。茶树的种植和茶叶的采摘耗时耗力,随着农业规模化机械化的进行,大规模茶园普遍使用采茶机器人,从而节省了人力成本,提升了经济效益。
3.现有的采茶机器人,一般包括切叶机构、行走机构、收集装置和电源装置,所述切叶机构和收集机构均设于行走机构上,利用切叶机构对茶树行顶端的嫩芽进行切割,切割下来的嫩芽被收集,行走机构驱动切叶机构对茶树行的茶树进行切割,从而利用收集装置将完成采茶采集。但现有的采茶机器人,难以在行进时自动调整自身行进的水平方向,从而会因为凹凸不平的地形而发生偏转,从而难以使自身始终沿着茶树行的方向行进。
技术实现要素:
4.本发明的目的是为了克服现有技术中的问题,提供一种智能化的采茶机器人,能自动调整自身行进的水平方向,保证自身行进方向不会因为凹凸不平的地形而发生偏转,从而使自身始终沿着茶树行的方向行进。
5.本发明提供了一种智能化的采茶机器人,包括切叶机构和电源装置,还包括:
6.总行走机构,与所述切叶机构连接;
7.转向机构,与所述总行走机构连接;
8.第一光线发射器,设于所述切叶机构上;
9.标板,插在茶树行的一端,所述标板上设有光电板,所述光电板上设有多个呈矩阵式排列的光敏传感器,所述多个光敏传感器用于检测第一光线发射器发射的光线,多个光敏传感器中的其中一个为基准光敏传感器;
10.处理器,与多个光敏传感器均电连接,用于计算受第一光线发射器发射光线后响应的光敏传感器到基准光敏传感器之间的位移量;
11.控制器,与所述处理器、转向机构和电源装置均电连接,所述控制器根据所述位移量控制所述转向机构动作。
12.较佳地,所述总行走机构,包括左行走机构和右行走机构,左行走机构和右行走机构结构分置于茶树行两侧,所述左行走机构和右行走机构结构相同,均包括前履带轮、后履带轮、安装板、第一液压缸、第二液压缸和液控回路,所述后履带轮与所述第一液压缸的第一活塞连接,所述第一液压缸的第一缸体与所述转向机构连接,所述安装板一端与第一缸体轴承连接,所述第二液压缸的第二缸体与安装板另一端轴承连接,所述切叶机构与安装板连接,所述第二液压缸的第二活塞与所述前履带轮连接,所述液控回路与第一缸体和第二缸体均连通,所述液控回路与所述控制器电连接,控制器根据所述位移量控制所述液控
回路动作。
13.较佳地,所述切叶机构上还设有第二光线发射器,所述多个光敏传感器能够检测第二发射机构发射的光线,所述处理器用于计算受第一光线发射器所发射光线后响应的光敏传感器到受第二光线发射器所发射光线后响应的光敏传感器的位移的变化量。
14.较佳地,所述第一活塞上设有沿竖直方向的异形槽,所述第一缸体上设有与所述异形槽相配合的异形孔,所述异形槽和异形孔滑动连接。
15.较佳地,所述标板上还设有水平尺。
16.较佳地,所述转向机构包括传动轴和动力装置,所述左行走机构和右行走机构均与所述传动轴齿接,所述动力装置与传动轴齿接,动力装置与所述控制器电连接。
17.较佳地,所述左行走机构和右行走机构均设有减震机构。
18.较佳地,所述第一光线发射器可拆卸连接于所述切叶机构上。
19.与现有技术相比,本发明的有益效果是:本发明的一种智能化的采茶机器人,能自动调整自身行进的水平方向,保证自身行进方向不会因为凹凸不平的地形而发生偏转,从而使自身始终沿着茶树行的方向行进。本发明的总行走机构,能够防止因为地形的起伏导致切叶机构的高度发生变化,从而保证切叶机构所采的菜叶品质一致。通过设置第二光线发射器,能使切叶机构重新保持水平,进而保证切叶机构所采茶叶的品质一致。通过设置异形槽和异形孔,保证转向机构能够正常驱动后履带轮转动,进而保证总行走机构能够正常转动。通过设置水平尺,能够保证标板的姿态保持水平,从而防止由于标板自身歪斜导致总行走机构行进方向发生偏移。通过设置动力装置和传动轴,能够利用一个动力装置驱动左行走机构和右行走机构转向,从而简化了整个采茶机器人的结构,提升了整个整个采茶机器人可靠性。通过设置减震机构,能够防止切叶机构发生振动。
附图说明
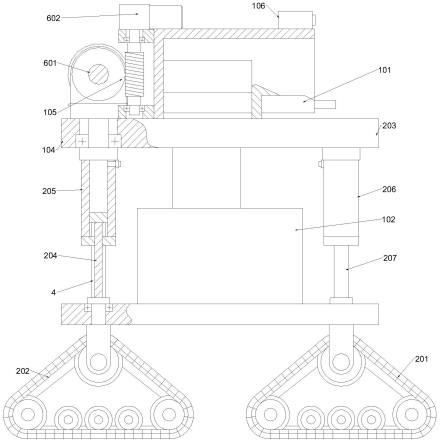
20.图1为本发明的结构示意图;
21.图2为本发明总行走机构处的结构示意图;
22.图3为本发明总行走机构处的左视结构示意图;
23.图4为本发明标板的结构示意图。
24.附图标记说明:
25.1.茶树行,101.切叶机构,102.收集装置,103.光敏传感器,104.总行走机构,105.转向机构,106.第一光线发射器,107.标板,108.光电板,201.前履带轮,202.后履带轮,203.安装板,204.第一活塞,205.第一缸体,206.第二缸体,207.第二活塞,3.第二光线发射器,4.异形槽,5.水平尺,601.传动轴,602.动力装置。
具体实施方式
26.下面结合附图1-4,对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
27.实施例1:
28.如图1-4所示,本发明提供的一种智能化的采茶机器人,包括切叶机构101、收集装
置102和电源装置,还包括:总行走机构104、转向机构105、第一光线发射器106和标板107,总行走机构104与所述切叶机构101连接;转向机构105与所述总行走机构104连接;第一光线发射器106设于所述切叶机构101上;标板107插在茶树行1的一端,所述标板107上设有光电板108,所述光电板108上设有多个呈矩阵式排列的光敏传感器103,所述多个光敏传感器103用于检测第一光线发射器106发射的光线,多个光敏传感器103中的其中一个为基准光敏传感器103;处理器与多个光敏传感器103均电连接,用于计算受第一光线发射器106发射光线后响应的光敏传感器103到基准光敏传感器103之间的位移量;控制器与所述处理器、转向机构105和电源装置均电连接,所述控制器根据所述位移量控制所述转向机构105动作。
29.现简述实施例1的工作原理:
30.在进行采茶时,采茶机器人的总行走机构104在茶树行1的行间运动,总行走机构104沿茶树行1行进时,位于行走机构上的切叶机构101对茶树的顶端进行切割,从而将茶树顶端的茶叶收割下,茶叶被收集进收集装置102内。总行走机构104在刚开始时,总行走机构104上的第一光线发射器106发射的光线照射于位于茶树行1一端的光电板108上,调整总行走机构104的转向,使得第一光线发射器106发射的光线照射在光电板108上的基准光敏传感器103上。在总行走机构104沿茶树行1行进时,当总行走机构104的的朝向因为凹凸不平的地形而发生偏转时,第一光线发射器106发射的光线会在光电板108上发生偏移,从而使得发生响应的光敏传感器103发生变化,处理器计算受第一光线发射器106发射光线后响应的光敏传感器103到基准光敏传感器103之间的位移量,控制器根据所述位移量控制所述转向机构105动作,从而控制总行走机构104的朝向发生变化,此时,第一光线发射器106发射的光线照射在光电板108上与基准光敏传感器103位于同一竖直线上的光敏传感器103上,使总行走机构104的朝向重新回正,从而保证总行走机构104行进方向不会因为凹凸不平的地形而发生偏转,从而使总行走机构104始终沿着茶树行1的方向行进。
31.本发明的一种智能化的采茶机器人,能自动调整自身行进的水平方向,保证自身行进方向不会因为凹凸不平的地形而发生偏转,从而使自身始终沿着茶树行1的方向行进。
32.实施例2:
33.在实施例1的基础上,为了能够调整切叶机构101的竖直高度,进而防止总行走机构104因为地形的起伏导致切叶机构101的高度发生变化,从而保证切叶机构101所采的菜叶品质一致。
34.如图1和2所示,其中,所述总行走机构104,包括左行走机构和右行走机构,左行走机构和右行走机构结构分置于茶树行1两侧,所述左行走机构和右行走机构结构相同,均包括前履带轮201、后履带轮202、安装板203、第一液压缸、第二液压缸和液控回路,所述后履带轮202与所述第一液压缸的第一活塞204连接,所述第一液压缸的第一缸体205与所述转向机构105连接,所述安装板203一端与第一缸体205轴承连接,所述第二液压缸的第二缸体206与安装板203另一端轴承连接,所述切叶机构101与安装板203连接,所述第二液压缸的第二活塞207与所述前履带轮201连接,所述液控回路与第一缸体205和第二缸体206均连通,所述液控回路与所述控制器电连接,控制器根据所述位移量控制所述液控回路动作。
35.在总行走机构104沿茶树行1进时,地形的起伏会导致总行走机构104的运动发生起伏,进而导致切叶机构101的高度发生变化,此时位于切叶机构101上的第一光线发射器
106发射的光线照射到光电板108上的位置发生变化,从而使发生响应的光敏传感器103发生变化,由于处理器始终计算受第一光线发射器106发射光线后响应的光敏传感器103到基准光敏传感器103之间的位移量,控制器根据所述位移量的竖直方向的分位移控制液控回路动作,从而调整第一液压缸和第二液压缸的高度,进而调整切叶机构101的高度,此时,第一光线发射器106发射的光线照射在光电板108上与基准光敏传感器103位于同一水平线上的光敏传感器103上,从而调整切叶机构101的竖直高度,防止总行走机构104因为地形的起伏导致切叶机构101的高度发生变化,从而保证切叶机构101所采的菜叶品质一致。
36.实施例3:
37.在实施例2的基础上,为了在左行走机构和右行走机构所处的地面存在高度差时,防止切叶机构101发生竖直方向上的偏转,进而防止切叶机构101在茶树行1两侧的采集深度不同而影响茶叶品质。
38.如图1和3所示,其中,所述切叶机构101上还设有第二光线发射器3,所述多个光敏传感器103能够检测第二发射机构发射的光线,所述处理器用于计算受第一光线发射器106所发射光线后响应的光敏传感器103到受第二光线发射器3所发射光线后响应的光敏传感器103的位移的变化量。
39.通过设置第二光线发射器3,当在左行走机构和右行走机构所处的地面存在高度差时,位于左行走机构和右行走机构上的切叶机构101发生竖直方向上的偏转,从而使受第一光线发射器106发射光线后响应的光敏传感器103到受第二光线发射器3所发射光线后响应的光敏传感器103的位移发生变化,处理器实时计算所述变化量,控制器根据所述变化量控制液控回路动作,进而调整左行走机构和右行走机构的高度差,从而抵消左行走机构和右行走机构所处的地面的高度差,使切叶机构101重新保持水平,进而保证切叶机构101所采茶叶的品质一致。
40.作为一种优选方案,如图2和3所示,其中,所述第一活塞204上设有沿竖直方向的异形槽4,所述第一缸体205上设有与所述异形槽4相配合的异形孔,所述异形槽4和异形孔滑动连接。通过设置异形槽4和异形孔,使得转向机构105在驱动第一缸体205转动时,防止第一活塞204和第一缸体205发生相对转动,保证转向机构105能够正常驱动后履带轮202转动,进而保证总行走机构104能够正常转动。
41.作为一种优选方案,如图1和4所示,其中,所述标板107上还设有水平尺5。通过设置水平尺5,能够保证标板107的姿态保持水平,从而防止由于标板107自身歪斜导致总行走机构104行进方向发生偏移。
42.作为一种优选方案,如图1-3所示,其中,所述转向机构105包括传动轴601和动力装置602,所述左行走机构和右行走机构均与所述传动轴601齿接,所述动力装置602与传动轴601齿接,动力装置602与所述控制器电连接。通过设置动力装置602和传动轴601,能够利用一个动力装置602驱动左行走机构和右行走机构转向,从而简化了整个采茶机器人的结构,提升了整个整个采茶机器人可靠性。
43.作为一种优选方案,如图1所示,其中,所述左行走机构和右行走机构均设有减震机构7。通过设置减震机构7,能够防止切叶机构101发生振动。
44.作为一种优选方案,如图1所示,其中,所述第一光线发射器106可拆卸连接于所述切叶机构101上。通过将第一光线发射器106可拆卸连接于所述切叶机构101上,能够方便第
一光线发射器106的维修和更换。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1