基于无人机的深纹核桃果实采收方法
1.本技术涉及核桃采收技术领域,特别是一种基于无人机的深纹核桃果实采收方法。
背景技术:
2.深纹核桃(juglans sigillata d)和北方核(juglans regia l)是中国广泛栽培的核桃品种。深纹核桃,又被称为云南核桃、南方核桃,有三个最具代表性的栽培良种,即
‘
漾濞泡核桃’、
‘
三台核桃’、
‘
细香核桃’。深纹核桃的树体特等是树体高大,一般在10至30米桃,采收困难。全省境内的核桃种植面积高达4380万亩,深纹核桃占98%以上,其中
‘
漾濞泡核桃’品种占70%以上。
3.云南深纹核桃的生长特点为:3月上中旬开花结果,5~6月为果实的速生期,果实生长对树体光合营养积累产物消耗的关键期在6月上旬至8月中旬,9月中旬果实成熟,10月中下旬开始落叶。7月中旬至8月下旬果实成熟前这30至50天的叶片光合积累对次年结果影响大,如果此期积累充分的情况下,果实成熟期落叶对次年结果影响不大。
4.传统的深纹核桃果实采收方法为:到每年核桃成熟季节,由采收工人攀爬到树体中部,攀附站立在较粗壮支持枝杈处,用长竹竿敲落树体上的果实。该采收方法存在以下问题:
5.1、人工采收成本高且容易发生跌落等危险情况;每敲落1kg核桃坚果的成本约为1.5~2元;由于树体高大,操作人员需爬到离地10~20m高的树杈上站稳后进行敲打,由于站立位置离地太高且竹竿较长操作难度大,在没有有效防护手段和工具的情况下,在核桃主产区大理州,每年核桃采收季中都会发生几十人次的死伤事故,严重危险操作人员人身安全;
6.2、由于成熟果实着生在树体果枝顶部,人工打落时主要敲打果枝或果体,无法对部分晚熟果实施加不同的力,导致采收果实中存在部分未成熟果实。这部分掉落的果实无法在树上继续发育,只能采用化学催熟剂进行人工催熟去除青皮,影响这部分果实口感和质量;
7.3、工作量大采收效率低,采用上述方法完成对一棵高15至20米,树冠投影面积占地300m2核桃树上的所结果实采收需要8~12人工时。
8.4、人工采收中工人对竹竿操作难度大,难免对挂果树枝造成不可逆的损伤,影响树体次年结果量;
9.基于以上生长特性,现有通过无人机进行核桃树采收的工具存在以下问题:
10.1、现有技术中采用无人机对核桃树进行采收时,主要通过对无人机机体进行改进,在机体底面挂设各类操作工具,此类操作工具结构复杂,且单次只能对单个果体进行采收操作,不但采收操作效率低,无人机飞行过程中受外力干扰后,其自身飞行可靠性也无法得到保障,易导致无人机坠毁或撞击树体,影响无人机的正常使用。同时无人机难以深入树杈之间进行操作,一旦深入其中还会树形性造成损失,影响次年树体的产果量。
11.2、现有技术中还提出:通过在无人机上设置能对树体施加剪切力的工具,剪切结果树枝后,实现采收。且不论该工具通过无人机负载后在核桃树上使用的实际可行性,此类工具会对树体的树形、叶片健康度、完整性造成严重损失,影响次年树体的产果量。
12.传统核桃采收方法成本高、安全风险高、效率低、对树体造成损伤,现有通过无人机采收核桃操作难度大、效率低、易损伤树体及树叶完整性影响次年树体结果量,已经成为当前云南深纹核桃生产中的重大技术难题。
技术实现要素:
13.本技术提供了一种基于无人机的深纹核桃果实采收方法,用于解决现有技术中存在的传统核桃采收方法成本高、安全风险高、效率低、对树体造成损伤;现有通过无人机采收核桃操作难度大、效率低、易损伤树体及树叶完整性影响次年树体结果量的技术问题。
14.本技术提供的基于无人机的深纹核桃果实采收方法,包括以下步骤:
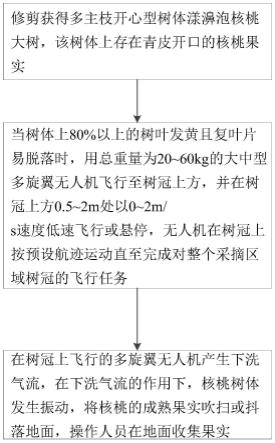
15.1)修剪培养获得多主枝开心型的深纹核桃树体,该树体上结的果实存在青皮开裂口的核桃果实;
16.2)当树体上80%以上的树叶发黄且复叶片易脱落时,用总重量为30~80kg的大中型多旋翼无人机飞行至树冠上方,并在树冠上方0.5~2m处以0~2m/s速度低速飞行和/或悬停,无人机在树冠上按预设航迹运动直至完成对整个采摘区域树冠的飞行任务;
17.3)在树冠上飞行的多旋翼无人机产生下洗气流,在下洗气流的作用下,核桃树体发生振动,将核桃的成熟果实吹扫和/或抖落地面,操作人员在地面收集果实。
18.优选地,所述步骤1)中所述该树体上存在青皮开口的核桃果实是指:整树上5~15%所结果实为青皮开口的核桃果实。
19.优选地,所述步骤1)还包括:用无人机向树冠叶片喷施质量浓度为0.3~0.5%的乙烯利的操作。
20.优选地,所述成熟果实的青皮果实在水平面上的投影面积为5~7cm2。
21.优选地,所述无人机包括:地面控制站;无人机与地面控制站无线电数传连接。
22.优选地,所述步骤2)中还包括:通过所述地面控制站对多旋翼无人机在采摘区域进行水平航迹规划。
23.优选地,所述无人机包括:机体和避障雷达,避障雷达设置于机体前向和机体下方。
24.优选地,所述避障雷达为激光雷达或超声波雷达。
25.优选地,所述无人机包括:差分卫星定位导航仪和无人机飞行计算模块,差分卫星定位导航仪和无人机飞行计算模块容纳设置于机体内,差分卫星定位导航仪和无人机飞行计算模块电连接。
26.优选地,所述步骤2)中采用无人机相对树冠高度自动控制方法控制无人机相对树冠顶面间隔维持在0.5~2m;
27.所述无人机相对树冠高度自动控制方法包括以下步骤:
28.步骤s21:由操作人员通过地面操作站设定多旋翼无人机相对树冠的预设相对飞高,并通过多旋翼无人机上设置的下视雷达获取该无人机与树冠顶面的实时相对高差;
29.步骤s22:通过pid控制算法实时得到实时相对高差与预设相对飞高的绝对差值
后,由pid控制算法向多旋翼无人机的动力系统发出控制指令,改变螺旋桨拉力,实时调整无人机飞高;
30.步骤s23:重复步骤s21~22,使得多旋翼无人机维持在预设相对飞高高度飞行。
31.本技术能产生的有益效果包括:
32.1)本技术所提供的基于无人机的深纹核桃果实采收方法,采用上述方法对处于成熟期的果实进行采收,主要利用了多旋翼无人机起飞后,在机体下方产生的向下吹扫的下洗气流,实现对树体从树冠至底部的全面吹扫,在下洗气流向下吹扫的过程中,多主枝开心型树体的树冠区域树枝受到下洗气流作用诱导产生湍流,使树枝发生一定频率的振动,核桃果实在该振动作用和/或直接气流吹动下抖动脱落,从而实现对核桃果实的自动采收。
33.2)本技术所提供的基于无人机的深纹核桃果实采收方法,处于成熟期的青皮果实果柄与树枝连接强度下降,此时进行上述操作能高效、快速完成对整体果实的采收操作。且采用多旋翼无人机进行吹扫,由于下洗气流速度有限,不能使未成熟果实的果柄与树枝分离,从而实现对未成熟果实的有效保护,实现核桃果实完全在树上成熟的效果。
34.3)本技术所提供的基于无人机的深纹核桃果实采收方法,采用该方法还能对树体实现有效保护,避免对树枝造成破坏和损伤,有利于采收后保持树体的次年结果量不下降。
35.4)本技术所提供的基于无人机的深纹核桃果实采收方法,该方法无需对现有多旋翼无人机结构进行复杂的改进,气流吹动树枝振动,采收效率高,且无人机与树体保持安全距离有利于保护无人机,避免无人机坠机损耗,减少在产业化实施阶段对无人机设备维护和更新方面的成本,实现该方法的低成本运行,最终达到为农户减负的目标。
36.5)本技术所提供的基于无人机的深纹核桃果实采收方法,该方法经过实验发现具有较好的采收效率,对整树成熟果实的采收率可达95%以上,且整个操作过程仅需1~3min,效率较高,人工投入少,采收成本低,无人机还可通过租借的形式进一步降低农户的使用成本。
附图说明
37.图1为本技术提供的基于无人机的深纹核桃果实采收方法流程示意图;
38.图2为本技术提供的无人机相对树冠高度自动控制方法流程示意图;
39.图3为本技术提供基于无人机的深纹核桃果实采收方法落果过程示意图;
40.图4为本技术提供具体实施例1中无人机吹扫采收现场照片;
41.图例说明:
42.1、多旋翼无人机;2、下洗气流。
具体实施方式
43.为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。通常在此处附图中描述和示出的本发明实施方式的组件可以以各种不同的配置来布置和设计。
44.因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领
域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
45.并不用于解决本技术技术问题的技术特征,均按现有技术中常用方法设置或安装,在此不累述。
46.参见图1~4,本技术提供了一种基于无人机的深纹核桃果实采收方法,包括以下步骤:
47.1)修剪培养获得多主枝开心型的深纹核桃树体,该树体上结的果实存在青皮开裂口的核桃果实;
48.2)当树体上80%以上的树叶发黄且复叶片易脱落时,用总重量为30~80kg的大中型多旋翼无人机飞行至树冠上方,并在相对树冠上方0.5~2m处以0~2m/s速度低速飞行和/或悬停,无人机在树冠上按预设航迹运动直至完成对整个采摘区域树冠的飞行任务;
49.3)在树冠上飞行的多旋翼无人机产生下洗气流,在下洗气流的作用下,核桃树体发生振动,将核桃的成熟果实吹扫或抖落地面,操作人员在地面收集果实。
50.本技术中复叶片易脱落是指叶片受到风力大于2级的自然风即可吹落的情况。
51.采用上述方法对处于成熟期的果实进行采收,主要利用了多旋翼无人机起飞后,在机体下方产生的向下吹扫的下洗气流,实现对树体从树冠至底部的全面吹扫,在下洗气流向下吹扫的过程中,多主枝开心型树体的树冠区域树枝受到下洗气流作用诱导产生湍流,使树枝发生一定频率的振动,核桃果实在该振动作用和/或直接气流吹动下抖动脱落,从而实现对核桃果实的自动采收。
52.处于成熟期的青皮果实果柄与果枝的连接力度下降,此时进行上述操作能高效、快速完成对整体果实的采收操作。且采用多旋翼无人机进行吹扫,由于下洗气流速度有限,不能使未成熟果实的果柄与树枝分离,从而实现对未成熟果实的有效保护,实现核桃果实完全在树上成熟的效果。
53.无人机在相对树冠的上方区域的0.5~2m处进行巡航,无人机相对高度稳定,使得无人机下洗气流落果效率最佳。
54.采用该方法还能对树枝实现有效保护,避免对树形造成破坏和损伤,有利于采收后保持树体的次年结果量不下降。
55.该方法无需对现有多旋翼无人机结构进行复杂的改进,气流吹动树枝振动,采收效率高,且无人机与树体保持安全距离有利于保护无人机,避免无人机坠机损耗,减少在产业化实施阶段对无人机设备维护和更新方面的成本,实现该方法的低成本运行,最终达到为农户减负的目标。
56.该方法经过实验发现具有较好的采收效率,对整树成熟果实的采收率可达95%以上,且整个操作过程仅需1~3min,效率较高,人工投入少,采收成本低,无人机还可通过租借的形式进一步降低农户的使用成本。
57.当树体上存在青皮开口的核桃果实时,此时核桃进入成熟期,可根据需要进行上述采收操作实现对核桃果实的采收。
58.漾濞泡核桃树体具有树体高大的特点,树冠顶面离地距离在10至30米范围内。该方法尤其适用于深纹核桃中的漾濞泡核桃采收,具有较好的采收效果。优选地,步骤1)中所述该树体上存在青皮开口的核桃果实是指:整树上5~15%所结果实为青皮开口的核桃果
实。所用无人机的总质量可根据需要在机体上设置配重达到,总重还可以为40kg、50kg、30kg、60kg、70kg、80kg。其青皮为核桃果实的外种皮结构。
59.具体地,树体上所结果的7%、8%、9%、11%、10%、12%、13%、14%为青皮开口的核桃果实。
60.优选地,所述步骤1)还包括:用无人机向树冠叶片喷施质量浓度为0.3~0.5%的乙烯利溶液的操作。采用该操作中浓度的乙烯利能实现对核桃果实的催熟,进一步降低果柄与树枝的连接可靠性,有利于提高成熟果实在无人机下吹气流湍流振动作用力下与果枝分离,提高采收率,采用该浓度的乙烯利结合无人机吹扫对深纹核桃的采收率可达98%,且其中基本不包含未成熟果实。
61.优选地,掉落地面的青皮果实在平面上的投影面积为5~7cm2。
62.该方法中利用无人机下洗气流对该青皮果实的表面施加向下压力,从而促进果实脱离树体。
63.该方法仅需利用无人机的下洗气流吹扫即可实现对核桃树冠挂果区域树枝的有效振动,随着无人机的巡航实现对树冠面积的全面覆盖,气流吹扫面积较大,可一次实现对树体果实的采收。
64.优选地,所述无人机包括:地面控制站;无人机与地面控制站无线电数传连接。操作人员通过地面控制站实现对无人机在树冠上方进行低速巡航飞行。
65.具体的,该方法的步骤2)包括以下步骤:
66.2)树体上所结的果实有5~15%青皮(即外种皮)开裂口时,用无人机将0.3~0.5%浓度的乙烯利溶液喷洒在果实表面和叶片上,当树体上80%以上的树叶发黄且复叶片易脱落时,用总重量为30~80kg的大中型多旋翼无人机飞行至树冠上方,并在树冠上方0.5~2m处以0~2m/s速度低速飞行或悬停,无人机在树冠上按预设航迹运动直至完成对整个采摘区域树冠的飞行任务;
67.优选的,步骤2)中还包括:通过所述地面控制站对多旋翼无人机在采摘区域进行水平航迹规划。按此设置能实现对预定林区的大面积采摘操作。操作员可以通过地面站,规划无人机作业区域和航迹。具体实现方式可通过采购具有该功能的无人机及其地面站获得。
68.优选地,所述无人机包括:机体和避障雷达,避障雷达设置于机体前向和机体下方。通过设置避障雷达,使得无人机可以测量机体前方障碍物和机体下方树冠或地面的距离,能够有效避开前向障碍并能有效控制无人机机体距离树冠顶部的距离。
69.优选的,所述无人机包括:差分卫星定位导航仪和无人机飞行计算模块,差分卫星定位导航仪和无人机飞行计算模块容纳设置于机体内,差分卫星定位导航仪和无人机飞行计算模块电连接。通过设置差分卫星定位导航仪能为无人机在核桃林区域的巡航提供高精度的定位和定速信息。差分卫星定位导航仪的设置按现有具有该模块的无人机设置,在此不累述。
70.优选的,所述避障雷达为激光雷达或超声波雷达,采用此类雷达能有效检测和识别出树叶、枝干等材质的物体,提高无人机在林间的飞行可靠性。
71.参见图2,优选的,步骤2)中采用无人机相对树冠高度自动控制方法控制无人机相对树冠顶面间隔维持在0.5~2m;
72.所述无人机相对树冠高度自动控制方法包括以下步骤:
73.步骤s21:由操作人员通过地面操作站设定多旋翼无人机相对树冠的预设相对飞高,并通过多旋翼无人机上设置的下视雷达获取该无人机与树冠顶面的实时相对高差;
74.步骤s22:通过pid控制算法实时得到实时相对高差与预设相对飞高的绝对差值后,由pid控制算法向多旋翼无人机的动力系统发出控制指令,改变螺旋桨拉力,实时调整无人机飞高;
75.步骤s23:重复步骤s21~22,使得多旋翼无人机维持在预设相对飞高高度飞行。
76.采用上述控制方法可有效控制无人机相对树冠的相对飞高,根据机体下方避障雷达实时测量的机体相对树冠的距离,与操作员设定的期望相对距离做比较,形成控制信号,自动控制无人机飞行高度。使无人机下洗气流对树冠吹扫效率维持在最佳落果区间内。
77.实施例
78.以下实施例中如无特殊说明所用仪器和设备均为商业渠道获取。
79.实施例1
80.参见图1~4按本技术提供方法进行采收,具体包括以下步骤:
81.1)修剪获得多主枝开心型深纹核桃树体,该树体上存在青皮开口的核桃果实;
82.2)当树体上80%以上的树叶发黄且复叶片易脱落时,用总重量为50kg的大中型多旋翼无人机1飞行至树冠上方,并在树冠上方1m处以1m/s速度低速飞行,无人机在树冠上按预设航迹运动直至完成对整个采摘区域树冠的飞行任务;
83.3)在树冠上飞行的多旋翼无人机1产生下洗气流2,在下洗气流2的作用下,核桃树体发生振动,将核桃的成熟果实吹扫和/或抖落地面,操作人员在地面收集果实。
84.步骤1)中所述该树体上存在青皮开口的核桃果实是指:整树上10%所结果实为青皮开口的核桃果实。
85.所述步骤1)还包括:用无人机向树冠叶片喷施溶液质量浓度为0.2%的乙烯利的操作。
86.掉落地面的青皮果实在平面上的投影面积为6cm2。
87.所述无人机包括:差分卫星定位导航仪、无人机飞行计算模块、机体、避障雷达、地面控制站、;无人机与地面控制站无线电数传连接。差分卫星定位导航仪和无人机飞行计算模块容纳设置于机体内,差分卫星定位导航仪和无人机飞行计算模块电连接。避障雷达设置于机体前向和机体下方,所用避障雷达为激光雷达。
88.步骤2)中还包括:通过所述地面控制站对多旋翼无人机1在采摘区域进行水平航迹规划。
89.按实施例1中方法进行采收操作实际操作照片如图3所示,其中多旋翼无人机1飞行在该核桃树树冠上方区域,并产生下洗气流2实现采收。
90.步骤2)中采用无人机相对树冠高度自动控制方法控制无人机相对树冠顶面间隔维持在0.5~2m;
91.所述无人机相对树冠高度自动控制方法包括以下步骤:
92.步骤s21:由操作人员通过地面操作站设定多旋翼无人机1相对树冠的预设相对飞高,并通过多旋翼无人机1上设置的下视雷达获取该无人机与树冠顶面的实时相对高差;
93.步骤s22:通过pid控制算法实时得到实时相对高差与预设相对飞高的绝对差值
后,由pid控制算法向多旋翼无人机1的动力系统发出控制指令,改变螺旋桨拉力,实时调整无人机飞高;
94.步骤s23:重复步骤s21~22,使得多旋翼无人机1维持在预设相对飞高高度飞行。
95.实施例2
96.与实施例1的区别在于:所用超声波雷达;所用大中型多旋翼无人机为20kg;飞行高度为树冠上方0.5m;飞行速度为0m/s进行悬停;
97.整树上5%所结果实为青皮开口的核桃果实;
98.向树冠叶片喷施质量浓度为0.3%的乙烯利的操作。
99.掉落地面的青皮果实在平面上的投影面积为7cm2。
100.实施例3
101.与实施例1的区别在于:所用超声波雷达;所用大中型多旋翼无人机为60kg;飞行高度为树冠上方2m;飞行速度为2m/s按预定轨迹进行巡航;
102.整树上15%所结果实为青皮开口的核桃果实;
103.向树冠叶片喷施质量浓度为0.5%的乙烯利的操作。
104.掉落地面的青皮果实在平面上的投影面积为5cm2。
105.实施例4
106.与实施例1的区别在于:无人机的飞行方式为以1.5m/s的速度飞行于采摘区域树冠上方,并驻点悬停。
107.对比例1
108.按每敲落1kg核桃坚果的成本约为1.5~2元,通过人工进行现场采摘。
109.对比例2
110.采用cn201910478830.8中公开的无人机进行采摘。
111.分别按本技术各项实施例和对比例,在1个小时内对树高为20~30m的多主枝开心型树体深纹核桃进行采收。树体条件均为:树体上存在青皮开口的核桃果实;树体上80%以上的树叶发黄且复叶片易脱落。
112.其中:整树果实采摘率%=采收操作完成后地面果实数量/整树青皮果实数量*100%。其中整树青皮果实数量可以有人工对树上余下青皮果实统计获得。
113.采摘果实中未成熟果实占比%=未成熟果实质量/采收所得果实质量*100%。
114.所得采收结果列于表1中。
115.表1
[0116][0117]
实施例2~4所得结果与实施例1类似,在次不累述。将上述各实施例中提供方法运用于漾濞泡核桃树的采收中能得到与实施例1相同的效果,
[0118]
由上表1可知,采用本技术提供的方法进行核桃采收,在相同采收时间内,采收效率最高,所得采收青皮果实重量最高;成本最低;整树果实采摘率最高;采摘所得果实中未成熟果实占比最低;达到了低成本、搞笑了的采收效果。
[0119]
该方法中无人机可进行大面积区域的采收操作操作,成本远低于采用人工。
[0120]
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1