人工智能远程捕兽笼及远程野兽捕抓方法与流程
1.本发明涉及捕兽工具的领域,具体涉及一种人工智能远程捕兽笼及远程野兽捕抓方法。
背景技术:
2.捕兽笼一般用于粮田果园、草场树林、粮库及野外一些特殊看护场所的防护保卫。阻止牲畜野兽啃食拱踏和一些有侵害来意对象的恶意进犯。现有技术中,广泛采用一种活门式捕兽笼来活捉狐狸、鼬、松鼠等小动物。这种活门式捕兽笼包括一个金属丝编织构成的长方体笼子,笼子的前端开口,笼子的前端开口内设置有一个门板,所述的门板的上侧边与笼子通过铰链结构连接,门板的下侧边与笼子之间设置有一个弹簧装置,所述的弹簧装置将门板的下侧边向笼子的底面偏置,从而完成笼子的关闭。笼子内部的底面上设置有一个踏板,所述的踏板的前侧边与笼子的底面通过铰链结构连接,踏板与门板之间设置有一个触发机构。人工将门板的下侧边抬起后开放笼子的前端开口,利用触发机构将门板锁定在预备位置,踏板的后侧边与触发机构联动后抬起。在笼子内部的后端设置诱饵,小动物寻找诱饵时进入笼内,其前肢踩踏踏板时,将踏板下压,触发与踏板联动的触发机构,解除门板的锁定状态,门板在弹簧装置的偏置作用下关闭笼子的前端开口,将小动物关闭在笼内。门板与笼子之间还设置有一个止退机构,以防止来自笼内的作用力将门板开启。现有技术中,踏板与门板之间的触发机构经常因为生锈或触发机构安装太紧而失效,造成捕捉失败。且该技术只适用于小型动物的抓捕(如老鼠)对野猪、狼、野狗等中大型野生动物的捕捉基本无任何作用。
技术实现要素:
3.本发明的目的在于克服现有技术存在的不足,而提供一种人工智能远程捕兽笼及远程野兽捕抓方法,具有远程监控、远程控制抓捕、安全高效的优势。
4.本发明的目的是通过如下技术方案来完成的:这种人工智能远程捕兽笼,包括笼体、控制主机、传感器组件、远程摄像头和远程控制平台,所述笼体为若干段抓捕围栏围成的封闭结构,在至少一段抓捕围栏上开设有抓捕入口,每一抓捕入口处与对应的抓捕围栏配合安装有升降笼门,所述升降笼门由升降电机控制升降,用于开启或关闭抓捕入口,升降电机由控制主机信号控制;在与抓捕入口对应的抓捕围栏上还设有传感器组件及远程摄像头,传感器组件用于实时监测抓捕入口附近的野兽活动情况并反馈至控制主机,所述远程控制平台与控制主机通信,以获取野兽活动情况;所述远程控制平台通过调取远程摄像头观察抓捕入口附近的野兽信息。
5.作为进一步的技术方案,所述升降笼门顶部设置横梁,传感器组件及远程摄像头分设于横梁的两侧;横梁的两端设有立柱,升降笼门通过铁环滑动安装在立柱上。
6.作为进一步的技术方案,所述横梁上设有滑轮,钢丝绳穿设在滑轮上,升降电机通过钢丝绳带动升降笼门升降。
7.作为进一步的技术方案,所述传感器组件包括人工智能摄像头、红外热成像传感器和红外位移传感器,所述人工智能摄像头用于智能识别、追踪野兽,所述红外热成像传感器用于感应野兽的位置,所述红外位移传感器用于感应野兽的运动状态;所述远程摄像头采用gsm摄像头。
8.作为进一步的技术方案,所述升降电机通过安装板固定在抓捕围栏上,控制主机固定在安装板上。
9.作为进一步的技术方案,所述远程控制平台通过物联网与控制主机进行通信,采用javascript语言web脚本。
10.作为进一步的技术方案,每一段抓捕围栏底部通过抓捕地笼支撑、固定,抓捕地笼埋入地下。
11.作为进一步的技术方案,所述捕兽笼还包括发声装置,所述发声装置由控制主机电连接控制,用于播放动物叫声以吸引野兽;所述发声装置设置在所述笼体内。
12.一种远程野兽捕抓方法,包括以下步骤:
13.1)当传感器组件监控到有野兽在抓捕入口附近活动后,反馈至控制主机,控制主机通过物联网与远程控制平台进行通信;
14.2)远程控制平台接收到野兽活动信号后,发出声光报警通知工作人员,工作人员通过远程控制平台调取远程摄像头,观察抓捕入口附近的野兽信息,并判断是否为目标野兽,根据目标野兽情况控制升降笼门关闭;
15.3)升降笼门关闭后,传感器组件继续追踪野兽,并通过控制主机与远程控制平台通信,通知工作人员到达现场。
16.作为进一步的技术方案,所述步骤2)中,若为目标野兽,则通过远程控制平台向控制主机下达指令,控制主机启动发声装置播放动物叫声吸引目标野兽,待目标野兽完全进入笼体内时,控制主机控制升降电机将升降笼门关闭;若非目标野兽,则解除远程控制平台声光报警。
17.本发明的有益效果为:解决了捕抓野兽时无法实时了解现场情况的问题。传统捕抓野兽靠机械传动或者靠传感器来实现关笼门的动作,其在完成关笼门动作时,无法判断进入笼中的是否为有侵害来意的野兽。无法实时了解现场就会出现误抓、误伤无关动物及人类等情况。本发明可通过gsm摄像头实时观察抓捕笼里面的野兽情况,解决无法现场观察引起的误抓、误伤。
附图说明
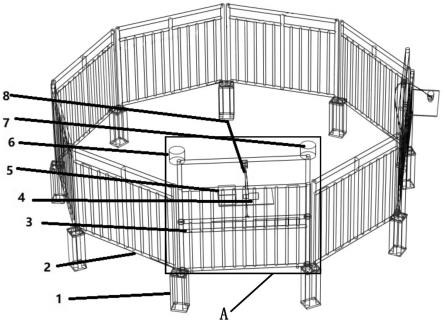
18.图1为本发明的结构示意图。
19.图2为图1中a区域的局部放大示意图。
20.附图标记说明:抓捕地笼1、抓捕围栏2、升降笼门3、升降电机4、控制主机5、传感器组件6、远程摄像头7、钢丝绳8、抓捕入口9、横梁10、安装板11、滑轮12、立柱13、铁环14。
具体实施方式
21.下面将结合附图对本发明做详细的介绍:
22.实施例:如附图1、2所示,这种人工智能远程捕兽笼,包括笼体、抓捕地笼1、抓捕围
栏2、升降笼门3、升降电机4、控制主机5、传感器组件6、远程摄像头7、钢丝绳8、抓捕入口9、横梁10、安装板11、滑轮12、立柱13、铁环14和远程控制平台。所述笼体采用若干段抓捕围栏2围成的封闭多边形结构,优选地,在每一段抓捕围栏2底部设置抓捕地笼1抓捕地笼1埋入地下,起到支撑、固定抓捕围栏2的作用,抓捕围栏2的底部栏杆与地面接触,防止笼内野兽出逃。
23.参考附图1,在两段(本实施例中为两段,也可以是更多数量)抓捕围栏2上开设有抓捕入口9,抓捕入口9即在抓捕围栏2的下半部分设置一个缺口,野兽可从该缺口进入笼内。如图2所示,每一抓捕入口9处与对应的抓捕围栏2配合安装有升降笼门3,所述升降笼门3顶部设置横梁10,传感器组件6及远程摄像头7分设于横梁10的两侧。横梁10的两端沿竖直方向设有立柱13,升降笼门3通过铁环14滑动安装在立柱13上。所述横梁10上设有滑轮12,钢丝绳8穿设在滑轮12上,升降电机4通过钢丝绳8(也可以采用v带、齿条等其他传动方式)带动升降笼门3升降,从而控制抓捕入口9的开启或关闭,升降电机4受到控制主机5的信号控制。
24.进一步的,所述传感器组件6包括人工智能摄像头、红外热成像传感器和红外位移传感器,所述人工智能摄像头用于智能识别、追踪野兽,所述红外热成像传感器用于感应野兽的位置,所述红外位移传感器用于感应野兽的运动状态。传感器组件6在监测到抓捕入口9附近的野兽活动情况后,会实时反馈至控制主机5,控制主机5通过物联网与远程控制平台进行通信,通信时采用javascript语言web脚本。远程控制平台获取野兽活动情况后,发出声光报警信号,通知工作人员;工作人员利用远程控制平台调取远程摄像头7观察抓捕入口9附近的野兽信息。
25.优选地,所述远程摄像头7采用gsm摄像头。所述升降电机4通过安装板11固定在抓捕围栏2上,控制主机5也固定在安装板11上。为了增加野兽进入捕兽笼内的几率,在笼体内还设置有发声装置,该发声装置可以是音响、喇叭等设备,主要用于播放、模拟动物的叫声,吸引野兽的注意。发声装置由控制主机5电连接控制。
26.一种远程野兽捕抓方法,包括以下步骤:
27.1)当传感器组件6监控到有野兽在抓捕入口9附近活动后,人工智能摄像头初步识别、追踪野兽,同时利用红外热成像传感器和红外位移传感器进一步确定野兽所在位置,随后发送信号至控制主机5,控制主机5借助物联网与远程控制平台进行通信;
28.2)远程控制平台接收到野兽活动信号后,立即发出声光报警信号通知工作人员,值班工作人员发现报警信号后,利用远程控制平台调取远程摄像头7,观察抓捕入口9附近的野兽信息,并判断是否为目标野兽,若为目标野兽,则通过远程控制平台向控制主机5下达指令,控制主机5启动发声装置,开始播放或模拟动物叫声进一步吸引目标野兽,工作人员观察到目标野兽完全进入笼体内时,立刻通过远程控制平台操作控制主机5遥控升降电机4将所有升降笼门3关闭;若非目标野兽,则解除远程控制平台声光报警,进入常态化监控状态。
29.3)升降笼门3关闭后,传感器组件6(人工智能摄像头)继续追踪野兽,并通过控制主机5与远程控制平台通信,通知工作人员到达现场。
30.本发明通过安装在捕抓笼上的人工智能传感器,回传捕抓笼附近野兽出现的信息到远方控制室,远方控制室接到捕抓笼报警后,通过远程摄像头观察现场情况,当野兽进入
笼子内部后,控制室通过远程控制开关,将野兽成功捕抓。
31.可以理解的是,对本领域技术人员来说,对本发明的技术方案及发明构思加以等同替换或改变都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1