防治叶蜂的装置的制作方法
1.本发明涉及叶蜂防治领域,特别涉及用于人工果林中梨茎蜂、梨实蜂等果树叶蜂害虫防治领域的一种防治叶蜂的装置。
背景技术:
2.较著名的果树叶蜂害虫有:梨茎蜂(梨简脉茎蜂)、梨实蜂(梨实叶蜂)、李实蜂(李单室叶蜂)、桃叶蜂(中华槌缘叶蜂)、山楂壮锤角叶蜂等。以梨茎蜂、梨实蜂为例,防治过程一般会根据果林中果树的状态利用不同的防治方法,在果树的落花期一般是利用其生活习性在清晨采用振落捕杀的方式进行叶蜂的防治,而目前的振落捕杀是直接采用人工进行。
3.目前的果林基本均是人工果林,果林规模大,会根据果树的生长的需求设定果树间的间距。在清晨这一短暂的时间内采用人工振落果林中果树上的叶蜂,并需要在果树的底部铺设布料用以接住振落的叶蜂,此过程中工作量大,人工振落时施力的效果不稳定,振落的效果无法保证,有时又有可能会对果树造成损伤,同时振落的叶蜂可能会在风力的作用下飘出布料范围掉了至地面上,并重新伤害果树。
技术实现要素:
4.本发明的目的提供一种防治叶蜂的装置,解决上述现有技术问题中的一个或多个。
5.本发明提出的防治叶蜂的装置包括行走组件、伸缩旋转组件、振落工作组件以及接收组件,伸缩旋转组件和接收组件均设置于行走组件上,伸缩旋转组件的顶部设置振落工作组件,接收组件对应伸缩旋转组件和振落工作组件设置,其中
6.行走组件用于带动伸缩旋转组件、振落工作组件以及接收组件移动;
7.伸缩旋转组件用于将振落工作组件送至需要进行振落工作的树枝处;
8.振落工作组件用于振动树枝,振落树枝上的叶蜂;
9.接收组件用于在振落工作组件工作前展开,在伸缩旋转组件和振落工作组件的四周形成一个闭合的环形件用于接住振落的叶蜂。
10.在一些实施方式中,所述行走组件包括底座和设置于底座底部的用于控制行走组件行走的履带行走组件,所述伸缩旋转组件设置于底座上。
11.在一些实施方式中,所述伸缩旋转组件包括基座,基座上设有上下贯穿的第二凹槽,基座上避开第二凹槽设置一个或多个升降组件,其中顶部的第二升降组件的上端设有旋转组件,所述旋转组件的底部设有多个辅助组件,辅助组件包括第二旋转组件、与第二旋转组件连接的辅助伸缩组件,辅助伸缩组件的端部设有连杆,连杆与振落工作组件连接,所述第二旋转组件与旋转组件之间通过自动旋转组件铰接。
12.在一些实施方式中,所述旋转组件顶部中间位置设有图像采集装置。
13.在一些实施方式中,底座的一侧对应第二凹槽设置上下贯穿的第一凹槽,第一凹槽的两侧分别设有一个履带行走组件,第二凹槽与第一凹槽开口方向一致,且相互连通,底
座的另一侧设置有推动组件,推动组件上设有操作组件,
14.操作组件包括行走控制按钮和控制面板,通过按压行走控制按钮控制行走组件行走;控制面板用于控制图像采集装置、伸缩旋转组件、振落工作组件以及接收组件的工作状态。
15.在一些实施方式中,振落工作组件包括与连杆连接连接部,连接部的端部的一端设置有工作段,工作段上与树枝接触的一侧成弧形,且该侧面上设置有压力感应装置。
16.在一些实施方式中,所述工作段的上表面上设有振动发生器,所述端部与连接部之间设有加强筋。
17.在一些实施方式中,所述基座下端部设有不闭合的环形件伸缩组件,环形伸缩组件上设有多个连接座,接收组件包括多根支撑杆、连接支撑杆的外布体、与外布体内边连接的内布体,支撑杆倾斜设置,
18.支撑杆与水平面之间的夹角为b
°
,b大于15,小于60;
19.内布体与水平面之间的夹角为c
°
,c大于30,小于90;
20.支撑杆与连接座一一对应,支撑杆的底部与对应的连接座连接。
21.在一些实施方式中,所述基座呈圆柱形,基座下端设有滑动槽,滑动槽的两端部之间的夹角为a
°
,a大于25,小于52;
22.环形伸缩组件嵌设与滑动槽内,且关于第二凹槽的中点与基座的圆心的连线对称分布,环形伸缩组件包括第三基座、分别设置于第三基座两端的两个弧形的第一伸缩组件、与第一伸缩组件连接的弧形的第二伸缩组件,第三基座、第一伸缩组件以及第二伸缩组件上均设有连接座,所述滑动槽端部的槽壁上对应第二伸缩组件设置辅助凹槽。
23.在一些实施方式中,所述外布体的两端部分别设有一根l形的连接件,两根连接件相适配,连接件与同侧端部的支撑杆之间通过弧形连杆连接。
24.本发明所述的防治叶蜂的装置的优点为:
25.结构合理,操作便捷,能够利用果树叶蜂害虫在早晨温度低时进入假死状态的特性或在喷洒农药后果树叶蜂害虫虫体僵硬的效果通过振落的方式将果树叶蜂害虫振落至接收组件上,其既能够有效的降低药物在果林中使用,也能够通过倾斜的外布体和内布体的设置接收振落的果树叶蜂害虫,有效的降低果树叶蜂害虫振落至接收组件外侧,保证振落效果。
附图说明
26.图1为本发明的一些实施方式中不安装接收组件的防治叶蜂的装置的结构示意图;
27.图2为本发明的一些实施方式中振动接头的结构示意图;
28.图3为本发明的一些实施方式中基座的剖面结构示意图;
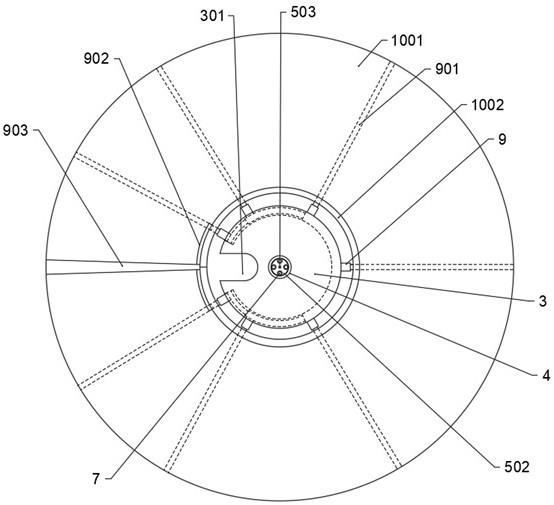
29.图4为本发明的一些实施方式中基座安装接收组件后的俯视图;
30.图5为本发明的一些实施方式中两个l形的连接件连接形态示意图;
31.图6为本发明的一些实施方式中支撑杆和内布体的布设要求示图。
具体实施方式
32.下面结合附图对本发明作进一步说明:
33.人工果林中在横向上和纵向上相邻的两颗果树之间的距离一般是固定的,彼此具有相近的间距。设人工果林中横向上相邻的两颗果树之间的距离为l1米,纵向上相邻的两颗果树之间的距离为l2米。
34.结合图1至图6所示的内容,
35.本发明中提出一种防治叶蜂的装置,包括行走组件、伸缩旋转组件、振落工作组件以及接收组件,伸缩旋转组件和接收组件均设置于行走组件上,伸缩旋转组件的顶部设置振落工作组件,接收组件对应伸缩旋转组件和振落工作组件设置,其中
36.行走组件用于带动伸缩旋转组件、振落工作组件以及接收组件移动;
37.伸缩旋转组件用于将振落工作组件送至需要进行振落工作的树枝处;
38.振落工作组件用于振动树枝,振落树枝上的叶蜂;
39.接收组件用于在振落工作组件工作前展开,在伸缩旋转组件和振落工作组件的四周形成一个闭合的环形件用于接住振落的叶蜂。
40.在一些具体的实施方式中,结合图1所示的内容,行走组件包括底座1和设置于底座1底部的用于控制行走组件行走的履带行走组件101,伸缩旋转组件设置于底座1上,其中利用履带行走组件101带动防治叶蜂的装置行走能够更好的使用果林中不平整的地面,使得行走的过程更加稳定可靠,此中叙述的履带行走组件101可以直接采用现有的技术进行实现,因此在此不做赘述。
41.伸缩旋转组件包括基座3,基座3上设有上下贯穿的第二凹槽301,基座3上避开第二凹槽301设置一个或多个升降组件,其中顶部的第二升降组件501的上端设有旋转组件502,旋转组件502的底部设有多个辅助组件,辅助组件包括第二旋转组件601、与第二旋转组件601连接的辅助伸缩组件602,辅助伸缩组件602的端部设有连杆7,连杆7与振落工作组件连接,第二旋转组件601与旋转组件502之间通过自动旋转组件铰接。
42.上述第二旋转组件601、旋转组件502和自动旋转组件均可直接采用现有的可以进行旋转的装置,辅助伸缩组件也可直接采用市面上现有的伸缩装置,因此在此不做赘述。
43.在一些具体的实施方式中,基座3上设有两个同轴设置的升降组件,分别为第一升降组件4和升降组件501,基座3、第一升降组件4以及第二升降组件501由下向上依次设置。上述的升降组件均可采用现有的与油泵连接的油缸、与气泵连接的气缸、电动机带动的升降装置等方式中的一种或多种。优选油缸或气缸,基座3、第一升降组件4以及第二升降组件501均为圆柱形或长方体,基座3水平方向截面的面积大于第一升降组件4水平方向截面的面积,第一升降组件4水平方向截面的面积大于第二升降组件501水平方向的截面的面积。
44.在一些具体的实施方式中,旋转组件502顶部中间位置设有图像采集装置503,在伸缩旋转组件工作的同时图像采集装置503也在不断进行图像采集,图像采集装置503中可以直接设置数据传输模块,数据传输模块用于与其他终端(比如:手机、电脑等)连接,将图像采集装置503采集到的图像传输至其他终端中,图像采集装置503可以直接采用现有技术实现,因此在此不做赘述。
45.在一些具体的实现方式中,底座1的一侧对应第二凹槽301设置上下贯穿的第一凹槽107,第一凹槽107的两侧分别设有一个履带行走组件101,第二凹槽301与第一凹槽107开
口方向一致,且相互连通,通过第一凹槽107和第二凹槽301的设置便于伸缩旋转组件更好的与果树的树根接近,便于以接近果树树根的位置为中心进行伸缩、旋转以及振落等操作。
46.底座1的另一侧设置有推动组件,推动组件上设有操作组件,
47.操作组件包括行走控制按钮202和控制面板201,通过按压行走控制按钮202控制行走组件行走;控制面板201用于控制图像采集装置503、伸缩旋转组件、振落工作组件以及接收组件的工作状态。
48.在一些具体的实现方式中,推动组件包括与底座1连接的辅助连接座102,辅助连接座102顶部设有翻板104,翻板104一侧端面通过铰接件103与辅助连接座102铰接,翻板104的另一侧端面1041呈向着铰接处所在方向凹陷的弧形,能够增强防治叶蜂的装置的移动的过程中通过翻转翻板104,使得翻板104的端面1041与接收组件抵接,对接收组件起到支撑的作用,增强移动过程中的稳定性;
49.辅助连接座102上靠近基座3一侧的上端折角1021的外表面呈圆弧形,且表面光滑平整,避免该折角磨伤外布体1001;
50.辅助连接座102的前后两侧端(辅助连接座102的中心点和基座3的中心线的连线与前后两侧端的连线垂直)分别连接一个连接臂105,两个连接臂105的上端部之间利用连接杆106连接,行走控制按钮202和控制面板201均设置于连接杆106上,其中控制面板201设置于连接杆106上,行走控制按钮202避开控制面板201设置,使用者使用时只需要双手握紧挤压行走控制按钮202即可,松开行走组件就会停止运行,连接杆106上设有两个行走控制按钮202,一个控制前进,另一个控制后退。
51.结合图2所示的内容,振落工作组件包括与连杆7连接连接部801,连接部801的端部802的一端设置有工作段804,
52.工作段804上与树枝接触的一侧成弧形,便于更好的与树枝接触,有助于振落工作的进行;
53.且该侧面(工作段804上与树枝接触的一侧)上设置有压力感应装置,压力感应装置优选现有的条形的压力感应装置,便于更好的适应不同位置不同状态的树枝。
54.上述的连接部801可以通过螺钉、在连接部801一侧的连接槽内设置螺纹等方式中的一种或多种与连杆7建立连接,此中的连接方式均可以采用现有技术实现,因此在此不做赘述。通过压力感应装置感应树枝与工作段804之间的压力。
55.在一些具体的实施方式中,工作段804的上表面上还设有振动发生器805,振动发生器805产生振动通过工作段804传输给树枝,作用于树枝;端部802与连接部801之间设有加强筋803,通过加强筋803的设置增强连接部801与端部802之间的连接强度,使得结构更加的稳定。
56.结合图1、图3、图4以及图6所示的内容,基座3下端部设有不闭合的环形件伸缩组件,环形伸缩组件上设有多个连接座9,接收组件包括多根支撑杆901、连接支撑杆901的外布体1001、与外布体1001内边连接的内布体1002,支撑杆901倾斜设置,
57.支撑杆901与水平面之间的夹角为b
°
,b大于15,小于60;
58.内布体1002与水平面之间的夹角为c
°
,c大于30,小于90;这样的设置使得外布体1001和内布体1002之间形成向下凹陷的凹槽,便于更好的接收振落的虫体;
59.支撑杆901与连接座9一一对应,支撑杆901的底部与对应的连接座9连接。
60.在一些具体的实施方式中,外布体1001与连接座9之间的支撑杆901的下侧面上设有辅助支撑杆,辅助支撑杆的底部设有万向轮,且万向轮的底部与底座1的上表面接触,通过万向轮和辅助支撑杆对支撑杆9起到支撑的作用,进一步的增强支撑杆901的稳定性。
61.结合图3所示的内容,基座3呈圆柱形,基座3下端设有滑动槽302,滑动槽302的两端部之间的夹角为a
°
,a大于25,小于52;
62.环形伸缩组件嵌设与滑动槽302内,且关于第二凹槽301的中点与基座3的圆心的连线对称分布,环形伸缩组件包括第三基座3031、分别设置于第三基座3031两端的两个弧形的第一伸缩组件3032、与第一伸缩组件3032连接的弧形的第二伸缩组件3033,第三基座3031、第一伸缩组件3032以及第二伸缩组件3033上均设有连接座9,滑动槽302端部的槽壁上对应第二伸缩组件设置辅助凹槽。
63.在一些具体的实施方式中,结合图5所示的内容,外布体1001的两端边部分别设有一根截面为l形的连接件903,两根连接件903相适配,连接件903与同侧端部的支撑杆901之间通过弧形连杆902连接。外布体1001两端进行连接时,两个连接件903形成如图5中所示状态,使得外布体1001两端闭合形成闭环。接收组件打开时两根连接件903连接形成长方体,接收组件在底面的投影呈圆环型,l1小于等于l2时,圆环型的外圆的半径等于l1;l1大于等于l2时,圆环型的外圆的半径等于l2。
64.在一些实施方式中,结合图3和图4所示的内容,第三基座3031的中间位置和两端分别设置一个连接座9,第一伸缩组件3032和第二伸缩组件3033均向着远离第三基座3031的方向伸出,第一伸缩组件3032和第二伸缩组件3033上远离第三基座3031的端部分别设有一个连接座9。
65.防治叶蜂的装置的工作原理为:
66.按压行走控制按钮202控制行走组件带动防治叶蜂的装置向着所在的果树运行;
67.当果树根部上侧的主杆进入第一凹槽107与第二凹槽301连接形成的凹槽内,且伸缩旋转组件的上方有空隙时停止按压行走控制按钮202,行走组件停止运行;
68.控制升降组件带动旋转组件502至所需位置;
69.控制旋转组件502带动连杆旋转至所需位置(即在辅助伸缩组件602控制连杆7于水平状态时可以自由伸缩没有树枝遮挡);
70.控制自动旋转组件带动辅助组件旋转至水平位置;
71.控制辅助伸缩组件602带动连杆7等向外伸出,然后通过第二旋转件601带动连杆7旋转,使得树枝置于振落工作组件内侧;
72.辅助伸缩组件602通过连杆7带动振落工作组件中的工作段804内缩,勾住树枝,当工作段804上的压力感应装置感应到树枝与工作段804之间内的压力达到阈值范围内(阈值范围是有操作人员事先在控制面板内的存储单元内设置存储的)时,振动发生器805开始振动,辅助伸缩组件602带动工作段804做往复运动,往复运动过程中压力感应装置感应到的值保持在阈值范围内,使得被勾住的树枝产生振动,振落果树上的叶蜂;
73.控制辅助伸缩组件602带动连杆7等向外伸出,然后通过第二旋转件601带动连杆7旋转,使得树枝置于振落工作组件内侧的同时第一伸缩组件3032和第二伸缩组件3033开始工作,带动其上的连接座9散开,使得其上连接的连接座9将外布体1001和内布体1002撑开形成环形的接收组件,用于接住振落的叶蜂;
74.振落操作完成后,振动发生器805停止运行,辅助伸缩组件602通过连杆7带动振落工作组件中的工作段804向外伸出,解除树枝与工作段804的接触,通过第二旋转件601旋转振落工作组件,使得振落工作组件的伸缩不会受树枝影响,然后辅助伸缩组件602带动连杆7等回缩复位,然后自动旋转组件控制辅助组件旋转至竖直位置,然后旋转组件502旋转复位,升降组件下降复位。通过行走控制按钮202控制行走组件带动防治叶蜂的黄纸后退,主杆从凹槽中退出,然后再控制防治叶蜂的装置至其他果树的位置继续进行叶蜂的防治操作。上述工作原理中涉及的自动化程序均可以直接采用现有的程序代码实现,因此在此不做赘述。
75.以上所述仅是本发明的优选方式,应当指出,对于本领域普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干相似的变形和改进,这些也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1