一种基于物联网技术的智能养鸡投食装置的制作方法
1.本发明涉及生态养鸡用设备技术领域,更具体地说,涉及一种基于物联网技术的智能养鸡投食装置。
背景技术:
2.生态养鸡指的是在林地、草地、荒山等地方养鸡,让鸡在大自然环境中自由生长。这种模式既能够最大限度地利用资源,减少浪费,降低成本,肥沃土地,也能够提高鸡肉品质,增加经济效益。在进行生态养鸡的前期,为了帮助鸡群生长,依旧需要对鸡群进行投喂。同时,为了让养殖工作更加便捷,许多养殖厂会利用物联网技术对投喂设备进行控制,因此,相关工作人员在进行生态养鸡的过程中经常会用到智能养鸡投食装置。现有技术公开号为cn213187664u的专利文献提供了一种智能化的养鸡料槽,该装置通过设置控制装置、重力传感器、电磁阀、处理器、播放器、定时器、gps定位器和无线发射器,使得管理员可以及时知道缺食信息以及缺食箱体的具有位置,实现全自动化、智能化、提高工作效率。虽然该装置有益效果较多,但依然存在下列问题:为了确保散养鸡能够在野外顺利生存,工作人员通常会将饲料投放在不同的位置以便提高散养鸡鸡苗在户外的觅食能力。而该装置直接将饲料投放入投食槽内,无法对散养鸡的采食能力进行锻炼,不利于散养鸡在野外生存。而且由于饲料集中在投食槽内,鸡苗之间无可避免的会发生争抢,体质较弱的鸡苗往往难以抢到食物,这会导致散养鸡鸡苗成活率下降,严重影响经济效益。鉴于此,我们提出一种基于物联网技术的智能养鸡投食装置。
技术实现要素:
3.1.要解决的技术问题
4.本发明的目的在于提供一种基于物联网技术的智能养鸡投食装置,以解决上述背景技术中提出的问题。
5.2.技术方案
6.一种基于物联网技术的智能养鸡投食装置,包括移动底座,所述移动底座上侧设有安装座,所述安装座上侧设有储料桶,所述储料桶上设有桶盖,所述桶盖一侧设有进料管,所述进料管上设有密封盖,所述储料桶下端连接有出料管,所述出料管上设有电磁阀,所述出料管远离储料桶一端连接有软管,所述软管一端转动连接有布料管,所述布料管外壁设有若干个贯穿布料管外壁的撒料管,所述出料管一侧设有鼓风机,所述鼓风机出风端端部连接有连接管,所述连接管下端呈倾斜结构穿过出料管外壁并延伸至其内腔。
7.作为本技术文件技术方案的一种可选方案,所述布料管为圆台形结构设置,所述布料管内腔中部设有导料壳,所述导料壳为锥形结构设置。
8.作为本技术文件技术方案的一种可选方案,所述布料管下侧设有投撒组件,所述投撒组件包括安装壳体、带动块及驱动机构,所述驱动机构能够带动带动块同时进行上下移动及转动。
9.作为本技术文件技术方案的一种可选方案,所述驱动机构包括与安装壳体转动连接的带动壳体以及设于带动块外侧的限位架,所述带动块受限于限位架并与限位架转动连接,所述安装壳体外侧设有第一电动机,所述第一电动机输出端端部与带动壳体连接,所述带动壳体内设有承接块,所述承接块及带动块上均设有第一转动架,所述承接块上侧设有连接杆,所述连接杆两端均设有第二转动架,所述第二转动架上转动连接有十字连接架,所述十字连接架与相应的第一转动架转动连接,所述安装壳体上还开设有限位槽,所述限位架与限位槽滑动连接,所述驱动机构还包括调整机构,所述调整机构能够对带动块上下移动的幅度进行调节。
10.作为本技术文件技术方案的一种可选方案,所述调整机构包括设于带动壳体内的丝杆,所述承接块与丝杆螺纹连接,所述承接块外壁受限于带动壳体内壁并与其滑动连接。
11.作为本技术文件技术方案的一种可选方案,所述储料桶内设有输送组件,所述输送组件包括设于桶盖上的第二电动机,所述第二电动机输出端端部连接有驱动轴,所述驱动轴下端延伸至出料管位于电磁阀上侧的内腔并连接有绞龙,所述输送组件还包括搅散机构,所述搅散机构能够对储料桶内的饲料进行搅散。
12.作为本技术文件技术方案的一种可选方案,所述搅散机构包括设于驱动轴外壁的若干个搅动杆及过滤组件,所述过滤组件能够对储料桶内的饲料进行筛分。
13.作为本技术文件技术方案的一种可选方案,所述过滤组件包括设于储料桶内腔位于搅动杆下侧处的滤网,靠近所述滤网的搅动杆外壁上固定设置有多个推杆,所述推杆与滤网顶面活动接触,所述过滤组件还包括振荡机构,所述振荡机构能够带动滤网进行上下振荡。
14.作为本技术文件技术方案的一种可选方案,所述振荡机构包括设于滤网上侧的斜面圆柱形活动环、设于驱动轴上的承接杆、设于滤网下侧的垫板,所述垫板上设有与滤网连接的弹簧,所述承接杆一端嵌设有滚珠,所述滚珠抵触在斜面圆柱形活动环的顶端。
15.作为本技术文件技术方案的一种可选方案,所述储料桶下侧设有重力传感器,所述储料桶一侧设有控制机构,所述控制机构上设有信号发射模块,所述电磁阀及重力传感器均与控制机构电性连接,所述控制机构能够对重力传感器的测量结果进行采集与存储。
16.3.有益效果
17.相比于现有技术,本技术技术方案的优点在于:
18.1、本技术技术方案通过设置鼓风机及布料管,在对散养鸡鸡苗进行投喂时,能够将饲料洒向各个位置,一方面有利于增强鸡苗的采食能力,另一方面也能够降低鸡苗之间互相抢夺食物的概率,使鸡苗都能够获取到食物,能够增强鸡苗的野外生存能力,有效提高鸡苗成活率。
19.2、本技术技术方案通过设置投撒组件,能够增加饲料的投撒区域,同时工作人员能够根据实际情况,对投撒区域进行调节,使得饲料能够被洒向不同区域,有效提高对鸡苗采食能力进行锻炼的效果。
20.3、本技术技术方案通过设置输送组件,能够对储料桶内的饲料进行搅散,一方面能够避免储料桶内的饲料结块,避免饲料品质下降,另一方面,搅散后的饲料也更便于向外投撒,保证饲料的投撒效果,有效降低了本装置出现故障的概率。
附图说明
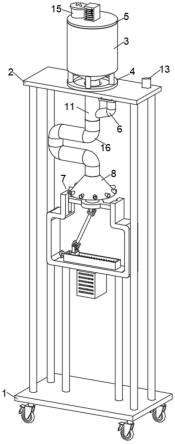
21.图1为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置的整体结构示意图;
22.图2为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置中安装座上侧的部分结构示意图;
23.图3为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置中布料管的结构剖视示意图;
24.图4为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置中投撒组件的结构示意图;
25.图5为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置中安装壳体内侧的部分结构示意图;
26.图6为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置中输送组件的结构示意图;
27.图7为本技术文件一较佳实施例公开的基于物联网技术的智能养鸡投食装置中a处结构的放大示意图。
具体实施方式
28.请参阅图1-7,本发明提供一种技术方案:
29.一种基于物联网技术的智能养鸡投食装置,包括移动底座1,移动底座1上侧设有安装座2,安装座2上侧设有储料桶3,储料桶3上设有桶盖5,桶盖5一侧设有进料管15,进料管15上设有密封盖14,储料桶3下端连接有出料管11,出料管11上设有电磁阀12,出料管11远离储料桶3一端连接有软管16,软管16一端转动连接有布料管8,布料管8外壁设有若干个贯穿布料管8外壁的撒料管18,出料管11一侧设有鼓风机10,鼓风机10出风端端部连接有连接管6,连接管6下端呈倾斜结构穿过出料管11外壁并延伸至其内腔。
30.本实施方式中,电磁阀12打开后,储料桶3内的饲料由出料管11及软管16进入布料管8内,在鼓风机10的作用下,布料管8内的饲料会在气流的冲击下通过撒料管18向外撒布,使得饲料均匀的撒向各个位置,有利于提高鸡苗的采食能力,避免鸡苗抢夺食物。
31.具体的,布料管8为圆台形结构设置,布料管8内腔中部设有导料壳17,导料壳17为锥形结构设置。
32.本实施方式中,设置导料壳17的目的是便于将进入布料管8上侧的饲料导向布料管8底部,避免饲料在布料管8内堆积。
33.进一步的,布料管8下侧设有投撒组件7,投撒组件7包括安装壳体701、带动块711及驱动机构,驱动机构能够带动带动块711同时进行上下移动及转动。
34.本实施方式中,带动块711在驱动机构的作用下能够带动布料管8在上下移动的同时进行转动,从而扩大饲料的撒布范围,进一步提高本装置对鸡苗采食能力进行锻炼的效果。
35.再进一步的,驱动机构包括与安装壳体701转动连接的带动壳体709以及设于带动块711外侧的限位架702,带动块711受限于限位架702并与限位架702转动连接,安装壳体701外侧设有第一电动机710,第一电动机710输出端端部与带动壳体709连接,带动壳体709
内设有承接块708,承接块708及带动块711上均设有第一转动架712,承接块708上侧设有连接杆705,连接杆705两端均设有第二转动架703,第二转动架703上转动连接有十字连接架706,十字连接架706与相应的第一转动架712转动连接,安装壳体701上还开设有限位槽704,限位架702与限位槽704滑动连接,驱动机构还包括调整机构,调整机构能够对带动块711上下移动的幅度进行调节。
36.本实施方式中,在第一电动机710的作用下,带动壳体709会带动承接块708进行转动,在十字连接架706及连接杆705的连接下,带动块711将会进行转动,同时由于限位架702与限位槽704的限位作用,带动块711在进行转动的同时会进行上下移动。
37.更进一步的,调整机构包括设于带动壳体709内的丝杆707,承接块708与丝杆707螺纹连接,承接块708外壁受限于带动壳体709内壁并与其滑动连接。
38.本实施方式中,当工作人员需要对布料管8上下移动的幅度进行调节时,转动丝杆707,在带动壳体709的限位下,承接块708将进行移动,使得连接杆705的倾斜角度发生改变,从而改变带动块711及布料管8上下移动的幅度。
39.值得说明的是,储料桶3内设有输送组件9,输送组件9包括设于桶盖5上的第二电动机902,第二电动机902输出端端部连接有驱动轴901,驱动轴901下端延伸至出料管11位于电磁阀12上侧的内腔并连接有绞龙906,输送组件9还包括搅散机构,搅散机构能够对储料桶3内的饲料进行搅散。
40.本实施方式中,在第二电动机902的作用下,驱动轴901会带动绞龙906转动,使得储料桶3内的饲料能够匀速向下输送。
41.值得注意的是,搅散机构包括设于驱动轴901外壁的若干个搅动杆903及过滤组件,过滤组件能够对储料桶3内的饲料进行筛分。
42.本实施方式中,当搅动杆903会跟随驱动轴901进行转动,对储料桶3内的饲料进行搅散,避免储料桶3内的饲料结块。
43.除此之外,过滤组件包括设于储料桶3内腔位于搅动杆903下侧处的滤网911以及设于距离滤网911最近的搅动杆903外壁的多个推杆907,推杆907与滤网911顶面活动接触,过滤组件还包括振荡机构,振荡机构能够带动滤网911进行上下振荡。
44.本实施方式中,只有被搅散后的饲料才能顺利通过滤网911,同时,当储料桶3内饲料较少时,推杆907能够将滤网911上沉积的饲料搅起,便于饲料进行搅散,使其顺利通过滤网911向下移动。
45.除此之外,振荡机构包括设于滤网911上侧的斜面圆柱形活动环910、设于驱动轴901上的承接杆908、设于滤网911下侧的垫板904,垫板904上设有与滤网911连接的弹簧905,承接杆908一端嵌设有滚珠909,滚珠909与斜面圆柱形活动环910滑动连接。
46.本实施方式中,随着驱动轴901的转动,会带动承接杆908及滚珠909跟随转动,由于滚珠909与斜面圆柱形活动环910滑动连接且在弹簧905的复位作用下,滤网911将进行一定程度的上下振荡,进一步使搅散后的饲料顺利通过滤网911进入出料管11内。
47.除此之外,储料桶3下侧设有重力传感器4,储料桶3一侧设有控制机构13,控制机构13上设有信号发射模块,电磁阀12及重力传感器4均与控制机构13电性连接,控制机构13能够对重力传感器4的测量结果进行采集与存储。
48.本实施方式中,当重力传感器4感应到储料桶3的重量达到阈值时,外部控制机构
13会通过信号发射模块将饲料过少的信息发送至终端,使得工作人员能够及时对储料桶3内的饲料进行补充。
49.当工作人员需要使用本装置对散养鸡鸡苗进行投喂时,首先在控制机构13的作用下,电磁阀12打开,且第二电动机902及鼓风机10运行,此时驱动轴901会带动搅动杆903及绞龙906进行转动,搅动杆903会对饲料进行搅散,搅散后的饲料由通过滤网911向下移动,同时转动的绞龙906会将饲料匀速向下输送至软管16内并进入布料管8中,在鼓风机10的作用下,布料管8内的饲料会在气流的冲击下通过撒料管18向外撒布,使得饲料均匀的撒向各个位置。
50.在此过程中,随着驱动轴901的转动,会带动承接杆908及滚珠909跟随转动,由于滚珠909与斜面圆柱形活动环910滑动连接且在弹簧905的复位作用下,滤网911将进行一定程度的上下振荡,使得饲料顺利通过滤网911。
51.此外,当工作人员需要对饲料撒布范围进行改变时,首先由工作人员转动丝杆707,在带动壳体709的限位下,承接块708将进行移动,使得连接杆705的倾斜角度发生改变,直至调节至适当状态后停止转动丝杆707。随后在第一电动机710的作用下,带动壳体709会带动承接块708进行转动,在十字连接架706及连接杆705的连接下,带动块711将会进行转动,同时由于限位架702与限位槽704的限位作用,带动块711在进行转动的同时会进行上下移动,从而改变饲料撒布范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1