一种用于草莓园的智能收获采摘设备及其采摘方法与流程
1.本发明涉及草莓收获采摘技术领域,具体说是一种用于草莓园的智能收获采摘设备及其采摘方法。
背景技术:
2.草莓由于口感比较细腻,营养较高,在市场上很受大家欢迎,因此,为了满足市场对草莓的需求,越来越多农户投资建设草莓园,随着草莓园越来越多,人工采摘草莓已经远远满足不了草莓园的需求,且由于人工采摘草莓效率低成本高,导致草莓园内草莓无法及时收获,为了解决这一问题,市场上出现了一种用于收获采摘草莓的设备,通过该收获采摘设备能够克服人工采摘草莓存在的弊端。
3.申请号为cn201711180583.0的中国专利公开了一种草莓采摘设备,包括布置有至少一个采摘组件的安装架,每一采摘组件均包括两个安装座,每一安装座均滑动安装在安装架上,在每一安装座上均连接有驱动其做直线滑动的第一驱动装置,在每一安装座上均铰接有连接臂,两个连接臂的另一端通过交汇块铰接,在交汇块上固定有与安装座滑动方向垂直的导杆,在导杆上活套有滑套,在滑套上铰接有两根连杆,两根连杆的另一端分别与两根连接臂铰接,在交汇块远离安装架的一端铰接有俯仰臂,在俯仰臂上连接有驱动其做俯仰运动的第二驱动装置,在俯仰臂远离交汇块的一端安装有采摘爪。从而提供了一种结构精巧、响应快、适应性强、节能环保、使用方便的草莓采摘设备,此专利公开的草莓采摘设备。
4.然而,现有的收获采摘设备在使用过程中存在很大的缺陷,现有的收获采摘设备需要人工操作,使用不够智能,人工进行操作时,操控不够精准,容易压坏草莓苗,同时,也会影响采摘效率,现有的收获采摘设备无法调节宽度,进而无法适用于不同垄距的草莓园,从而降低了该设备对草莓园地形的适应性,同时,该设备的行走调向以及调节不够灵活,现有的收获采摘设备进行采摘时,草莓叶会遮盖住部分草莓,会对设备的采摘造成干扰,一方面导致设备采摘时容易出现遗漏,另一方面导致设备采摘时容易弄伤草莓植株,同时,也容易将杂质夹杂进采摘的草莓中。
技术实现要素:
5.针对现有技术中的问题,本发明提供了一种用于草莓园的智能收获采摘设备及其采摘方法。
6.本发明解决其技术问题所采用的技术方案是:一种用于草莓园的智能收获采摘设备,包括行走底板、支撑台、旋转底座、采摘组件和吹风组件,所述行走底板顶部水平设置有支撑台,所述旋转底座固定在支撑台顶部,所述旋转底座顶部安装有采摘组件,所述采摘组件包括支撑座、一级力臂和电动夹爪,所述一级力臂一端铰接配合在支撑座上,所述一级力臂远离支撑座的一端铰接配合有二级力臂,所述二级力臂远离一级力臂一端铰接配合有三级力臂,所述三级力臂远离二级力臂一端通过螺栓固定有第二安装板,所述电动夹爪转动
配合在第二安装板一侧,该设备通过使用一级力臂、二级力臂和三级力臂相互配合,使电动夹爪的位置以及角度调节的更加灵便,通过将吹风组件安装在采摘组件的支撑座上,使吹风组件与采摘组件转向保持同步,通过使吹风组件与采摘组件转向保持同步,使该设备部件的配合更加协调,同时,使采摘组件和吹风组件的配合的更加紧密,减少采摘组件与吹风组件作业的间隔时间,进而提高采摘组件和吹风组件整体的速度;其中,所述吹风组件包括支撑柱、移板和气枪,所述吹风组件通过支撑柱安装在支撑座上,所述支撑柱的顶部水平焊接有水平轨板,所述移板移动配合在水平轨板一侧,所述移板远离水平轨板一侧升降配合有竖直轨板,所述竖直轨板的底部转动配合有连接板,所述连接板的底部铰接配合有一级悬臂,所述一级悬臂远离连接板的一端铰接有二级悬臂,所述二级悬臂远离一级悬臂一端铰接有三级悬臂,所述气枪安装在三级悬臂远离二级悬臂的一端,该设备通过使用吹风组件,将草莓植株的叶片吹向一边,使草莓果实能够暴露出来,通过将草莓果实暴露出来,一方面,方便该设备的采摘部件进行采摘,降低草莓叶片对采摘作业的干扰,进而有效避免采摘草莓果实时误伤草莓植株,进而对草莓植株起到一种保护作用,同时,也能减少采摘下来的草莓果实中的杂质,使采摘的草莓果实更加干净,另一方面,使该设备的采摘部件定位草莓果实更加简单,采摘时减少遗漏,通过使草莓植株上成熟的果实都能被采摘干净,同时,也避免出现成熟果实未及时采摘腐坏在园中的情况,也降低了草莓果实腐败引起草莓病害的可能,通过使用水平轨板、移板和竖直轨板相互配合,调节气枪的前后上下位置,通过使用连接板、一级悬臂、二级悬臂和三级悬臂相互配合,调节气枪的朝向、位置和角度,同时,使该设备气枪位置定位的更加准确,进而使气枪对草莓植株的吹风效果更好,通过气枪吹风方式将草莓植株叶片拨开,不会对草莓植株的根茎造成损伤,同时,通过吹风方式能够在将草莓叶片吹向一边的同时,保证草莓果实位置不会发生改变,且不会对草莓果实造成损伤。
7.优选的,行走底板的四角均通过螺栓铰接配合有支撑腿,四个支撑腿均能够通过拧松螺栓转动以及拧紧螺栓固定,四个支撑腿远离行走底板的一端向下铰接有第一安装板,四个第一安装板的顶部均设有驱动第一安装板转动的第一电机,四个第一安装板的一侧均转动配合有行走轮,四个行走轮一侧中心均安装有驱动行走轮转动的第二电机,通过将行走轮安装在支撑腿上,并通过铰接的方式安装支撑腿,使支撑腿通过拧松螺栓可以调节,进而使该设备两侧行走轮之间的距离可以调节,通过调节该设备两侧行走轮之间的距离,使该设备能够在垄距不同的草莓园行走采摘,进而使该设备对草莓园种植地形的适应性更强,同时,通过拧紧螺栓能够将支撑腿固定,使该设备不会因支撑腿出现晃动,通过在每个第一安装板上均安装第一电机,使该设备的四个行走轮均能独立转向,进而使该设备的转向调节更加灵活,通过使用四个第二电机进行驱动,使该设备的四个行走轮均能独立转动,配合独立转向功能,进一步提高该设备转向调节以及行进操控的灵活性。
8.优选的,支撑台一端靠近底部处平齐设置有若干个托板,若干个托板远离支撑台一端的顶部向上均焊接有呈“t”字型结构的卡板,若干个托板顶部放置有存放盒,若干个卡板和支撑台卡紧存放盒,通过设置托板承载存放盒,一方面,更换存放盒比较方便,为使用该设备带来便利,另一方面,通过更换存放盒避免了倾倒草莓果实这一过程,进而有效减低草莓果实的损伤,同时,也使得存放盒更换更加快捷,保证采摘过程不会中断。
9.优选的,支撑台的一侧开设有若干个滑道,若干个滑道内均设置有滑杆和弹簧,若
干个弹簧分别套设在若干个滑杆上,若干个滑杆一端均滑动配合有伸缩筒,若干个弹簧的端部分别与若干个滑道的里侧内壁固定连接,若干个弹簧的另一端部分别与若干个伸缩筒端部固定连接,若干个托板分别水平焊接在若干个伸缩筒上,且若干个托板通过若干个伸缩筒分别抽拉配合在若干个滑道内,通过设置弹簧拉动托板,一方面,使托板在不用使可以收纳起来,配合采摘组件的折叠,使该设备在不使用时体积更小,方便该设备的移动和收纳,另一方面,使托板端部的卡板能够紧紧挤压存放盒,保证存放盒放置的稳定性,同时,也使得托板能够放置不同型号的存放盒,使该设备兼容性更强。
10.优选的,旋转底座包括固定底板、旋转板和第三电机,固定底板通过螺栓固定在支撑台顶部,旋转板转动配合在固定底板顶部,固定底板顶部中心安装有驱动旋转板转动的第三电机,支撑座通过螺栓安装在旋转板顶部,通过设置旋转底座,调节吹风组件和采摘组件的角度,方便对不同区域的草莓进行采摘,同时也实现将采摘的草莓自动放入存放盒中。
11.优选的,支撑座一侧安装有驱动一级力臂转动的第四电机,二级力臂上安装有驱动二级力臂转动的第五电机,二级力臂靠近三级力臂一端安装有驱动三级力臂转动的第六电机,第二安装板远离电动夹爪一侧安装有驱动电动夹爪转动的第七电机,一级力臂由两个平行钢板组成,两个平行钢板之间的距离大于支撑柱的宽度,保证一级力臂收回时,不会被支撑柱阻挡,一级力臂的长度小于支撑柱的高度,一级力臂的长度大于二级力臂的长度,二级力臂的长度大于三级力臂的长度,使采摘组件端部的调节更加精细,使设备采摘定位的更加精准。
12.优选的,水平轨板的一侧水平焊接有两个第一滑轨和一个第一齿板,移板靠近水平轨板的一侧焊接有两个分别与两个第一滑轨滑动配合的第一滑块,移板靠近水平轨板的一侧转动配合有与第一齿板啮合的第一齿轮,移板远离水平轨板的一侧安装有驱动第一齿轮转动的第八电机,竖直轨板的一侧竖直焊接有两个第二滑轨和一个第二齿板,移板靠近竖直轨板的一侧焊接有两个分别与两个第二滑轨滑动配合的第二滑块,移板靠近竖直轨板的一侧转动配合有与第二齿板啮合的第二齿轮,移板远离竖直轨板的一侧安装有驱动第二齿轮的第九电机,通过使用第一滑块和第一滑轨滑动配合,使用第二滑块和第二滑轨滑动配合,使吹风组件水平方向以及上下方向调节的更加平滑流畅。
13.优选的,连接板底部安装有驱动连接板转动的第十电机,连接板一侧安装有驱动一级悬臂转动的第十一电机,一级悬臂一侧安装有驱动二级悬臂转动的第十二电机,二级悬臂一侧安装有驱动三级悬臂转动的第十三电机。
14.优选的,支撑台上安装有控制箱,控制箱内设置有plc控制器,控制箱外侧壁设置有控制按钮和显示屏,控制箱的顶部安装有为plc控制器提供通信的无线路由器,plc控制器可通过后台控制命令,行走底板周侧安装有若干个摄像头,若干个摄像头通过无线路由实时传递视频到后台,第二安装板靠近电动夹爪的一侧安装有识别成熟草莓的视觉传感器,该设备通过使用摄像头和控制箱,实现自动寻路,进而使该设备实现无人驾驶,同时,通过控制箱和摄像头智能化控制行进路线,使该设备在草莓园的行进路线更加精准,进而能够减少设备移动过程中对草莓苗造成的伤害,通过使用视觉传感器配合控制箱中的plc控制器,使该设备自动进行识别采摘。
15.优选的,该智能收获采摘设备的采摘方法具体包括以下步骤:步骤一:通过第二电机带动,使行走轮转动,通过转动行走轮,使该设备在草莓园
移动,通过摄像头实时拍摄并识别确定该设备行进路线,通过控制箱控制该设备的第一电机,使第一电机带动行走轮转向,对设备的行进路线进行调整;步骤二:通过行走底板周侧安装的摄像头确定草莓植株的位置,通过控制箱中的plc控制器进行控制第八电机、第九电机、第十电机、第十一电机、第十二电机和第十三电机,通过第八电机带动,使第一齿轮转动,第一齿轮通过与第一齿板啮合,使移板水平移动,通过水平移动移板,调节气枪的水平位置,通过第九电机带动,使第二齿轮转动,第二齿轮通过与第二齿板啮合,使竖直轨板上下移动,通过上下移动竖直轨板,调节气枪的高度,通过第十电机带动,使连接板转动,通过转动连接板,调节气枪的朝向,通过第十一电机、第十二电机和第十三电机带动,使一级悬臂、二级悬臂和三级悬臂转动,通过转动一级悬臂、二级悬臂和三级悬臂转动,调节气枪的位置以及角度,将气枪调节正对需要采摘的草莓植株,通过气枪吹气,将草莓植株的叶片吹向一边;步骤三:通过行走底板周侧安装的摄像头确定吹风组件吹风的草莓植株的位置,通过控制箱中的plc控制器进行控制第四电机、第五电机、第六电机和第七电机,通过第四电机、第五电机和第六电机带动,使一级力臂、二级力臂和三级力臂转动,通过转动一级力臂、二级力臂和三级力臂,调节电动夹爪的位置以及角度,并通过第二安装板端部的视觉传感器识别出成熟的草莓果实,根据视觉传感器测量的数据,由控制箱中的plc控制器控制采摘组件,使电动夹爪移向成熟的草莓果实,并通过电动夹爪将成熟草莓果实夹持,通过第七电机带动,使电动夹爪转动,将成熟的草莓果实采摘下来,通过第三电机带动,使采摘组件转动,将采摘组件转向存放盒的方向,将电动夹爪移向存放盒,将采摘的草莓果实放入存放盒中,完成草莓的采摘。
16.本发明的有益效果:(1)本发明中,该设备通过使用摄像头和控制箱,实现自动寻路,进而使该设备实现无人驾驶,从而使该设备的使用更加智能化,同时,通过控制箱和摄像头智能化控制行进路线,使该设备在草莓园的行进路线更加精准,进而能够减少设备移动过程中对草莓苗造成的伤害,从而提高该设备使用的可靠性,通过将行走轮安装在支撑腿上,并通过铰接的方式安装支撑腿,使支撑腿通过拧松螺栓可以调节,进而使该设备两侧行走轮之间的距离可以调节,通过调节该设备两侧行走轮之间的距离,使该设备能够在垄距不同的草莓园行走采摘,进而使该设备对草莓园种植地形的适应性更强,从而提高该设备适用性,同时,通过拧紧螺栓能够将支撑腿固定,使该设备不会因支撑腿出现晃动,通过在每个第一安装板上均安装第一电机,使该设备的四个行走轮均能独立转向,进而使该设备的转向调节更加灵活,通过使用四个第二电机进行驱动,使该设备的四个行走轮均能独立转动,配合独立转向功能,进一步提高该设备转向调节以及行进操控的灵活性。
17.(2)本发明中,该设备通过使用吹风组件,将草莓植株的叶片吹向一边,使草莓果实能够暴露出来,通过将草莓果实暴露出来,一方面,方便该设备的采摘部件进行采摘,降低草莓叶片对采摘作业的干扰,进而有效避免采摘草莓果实时误伤草莓植株,进而对草莓植株起到一种保护作用,从而进一步提高该设备使用的可靠性,同时,也能减少采摘下来的草莓果实中的杂质,使采摘的草莓果实更加干净,另一方面,使该设备的采摘部件定位草莓果实更加简单,采摘时减少遗漏,从而使每个草莓植株上成熟的果实都能被采摘的干净彻底,通过使草莓植株上成熟的果实都能被采摘干净,从而提高了草莓园的收获量,同时,也
避免出现成熟果实未及时采摘腐坏在园中的情况,从而避免了浪费,也降低了草莓果实腐败引起草莓病害的可能,通过使用水平轨板、移板和竖直轨板相互配合,调节气枪的前后上下位置,通过使用连接板、一级悬臂、二级悬臂和三级悬臂相互配合,调节气枪的朝向、位置和角度,从而使该设备的使用更加灵活,同时,使该设备气枪位置定位的更加准确,进而使气枪对草莓植株的吹风效果更好,通过气枪吹风方式将草莓植株叶片拨开,不会对草莓植株的根茎造成损伤,从而进一步提高该设备使用的可靠性,同时,通过吹风方式能够在将草莓叶片吹向一边的同时,保证草莓果实位置不会发生改变,且不会对草莓果实造成损伤。
18.(3)本发明中,该设备通过使用一级力臂、二级力臂和三级力臂相互配合,使电动夹爪的位置以及角度调节的更加灵便,从而进一步提高该设备使用的灵活性,通过将吹风组件安装在采摘组件的支撑座上,使吹风组件与采摘组件转向保持同步,通过使吹风组件与采摘组件转向保持同步,使该设备部件的配合更加协调,同时,使采摘组件和吹风组件的配合的更加紧密,减少采摘组件与吹风组件作业的间隔时间,进而提高采摘组件和吹风组件整体的速度,从而有效提高该设备使用的效率,通过使用视觉传感器配合控制箱中的plc控制器,使该设备自动进行识别采摘,从而进一步提高该设备智能化程度,通过设置托板承载存放盒,一方面,更换存放盒比较方便,为使用该设备带来便利,另一方面,通过更换存放盒避免了倾倒草莓果实这一过程,进而有效减低草莓果实的损伤,同时,也使得存放盒更换更加快捷,保证采摘过程不会中断,从而进一步提高该设备的采摘效率,通过设置弹簧拉动托板,一方面,使托板在不用使可以收纳起来,配合采摘组件的折叠,使该设备在不使用时体积更小,方便该设备的移动和收纳,另一方面,使托板端部的卡板能够紧紧挤压存放盒,保证存放盒放置的稳定性,从而进一步提高该设备使用的可靠性,同时,也使得托板能够放置不同型号的存放盒,使该设备兼容性更强。
附图说明
19.下面结合附图和实施例对本发明进一步说明。
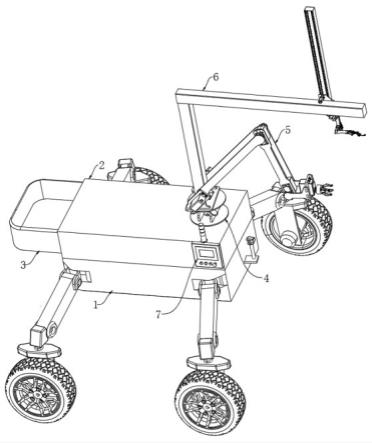
20.图1为本发明整体结构示意图。
21.图2为本发明行走底板与支撑台装配结构示意图。
22.图3为本发明支撑台剖视图。
23.图4为本发明托板与卡板连接示意图。
24.图5为本发明旋转底座结构示意图。
25.图6为本发明采摘组件结构示意图。
26.图7为本发明吹风组件结构示意图。
27.图8为本发明水平轨板结构示意图。
28.图9为本发明移板结构示意图。
29.图10为图7中a处细节放大图。
30.图11为图7中b处细节放大图。
31.图中:1、行走底板;101、支撑腿;102、第一安装板;103、第一电机;104、行走轮;105、第二电机;2、支撑台;201、滑道;202、滑杆;203、弹簧;204、伸缩筒;205、托板;206、卡板;3、存放盒;4、旋转底座;401、固定底板;402、旋转板;403、第三电机;5、采摘组件;501、支撑座;502、一级力臂;503、第四电机;504、二级力臂;505、第五电机;506、三级力臂;507、第
六电机;508、第二安装板;509、电动夹爪;510、第七电机;6、吹风组件;601、支撑柱;602、水平轨板;6021、第一滑轨;6022、第一齿板;603、竖直轨板;6031、第二滑轨;6032、第二齿板;604、移板;6041、第一滑块;6042、第一齿轮;6043、第八电机;6044、第二滑块;6045、第二齿轮;6046、第九电机;605、连接板;6051、第十电机;6052、第十一电机;606、一级悬臂;6061、第十二电机;607、二级悬臂;6071、第十三电机;608、三级悬臂;609、气枪;7、控制箱;8、摄像头。
具体实施方式
32.为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
33.如图1-图11所示,本发明所述的一种用于草莓园的智能收获采摘设备,包括行走底板1、支撑台2、旋转底座4、采摘组件5和吹风组件6,行走底板1顶部水平设置有支撑台2,旋转底座4固定在支撑台2顶部,旋转底座4顶部安装有采摘组件5,采摘组件5包括支撑座501、一级力臂502和电动夹爪509(型号:chy2-s80),一级力臂502一端铰接配合在支撑座501上,一级力臂502远离支撑座501的一端铰接配合有二级力臂504,二级力臂504远离一级力臂502一端铰接配合有三级力臂506,三级力臂506远离二级力臂504一端通过螺栓固定有第二安装板508,电动夹爪509转动配合在第二安装板508一侧,该设备通过使用一级力臂502、二级力臂504和三级力臂506相互配合,使电动夹爪509的位置以及角度调节的更加灵便,从而进一步提高该设备使用的灵活性,通过将吹风组件6安装在采摘组件5的支撑座501上,使吹风组件6与采摘组件5转向保持同步,通过使吹风组件6与采摘组件5转向保持同步,使该设备部件的配合更加协调,同时,使采摘组件5和吹风组件6的配合的更加紧密,减少采摘组件5与吹风组件6作业的间隔时间,进而提高采摘组件5和吹风组件6整体的速度,从而有效提高该设备使用的效率;其中,吹风组件6包括支撑柱601、移板604和气枪609(型号:ar10),吹风组件6通过支撑柱601安装在支撑座501上,支撑柱601的顶部水平焊接有水平轨板602,移板604移动配合在水平轨板602一侧,移板604远离水平轨板602一侧升降配合有竖直轨板603,竖直轨板603的底部转动配合有连接板605,连接板605的底部铰接配合有一级悬臂606,一级悬臂606远离连接板605的一端铰接有二级悬臂607,二级悬臂607远离一级悬臂606一端铰接有三级悬臂608,气枪609安装在三级悬臂608远离二级悬臂607的一端,该设备通过使用吹风组件6,将草莓植株的叶片吹向一边,使草莓果实能够暴露出来,通过将草莓果实暴露出来,一方面,方便该设备的采摘部件进行采摘,降低草莓叶片对采摘作业的干扰,进而有效避免采摘草莓果实时误伤草莓植株,进而对草莓植株起到一种保护作用,从而进一步提高该设备使用的可靠性,同时,也能减少采摘下来的草莓果实中的杂质,使采摘的草莓果实更加干净,另一方面,使该设备的采摘部件定位草莓果实更加简单,采摘时减少遗漏,从而使每个草莓植株上成熟的果实都能被采摘的干净彻底,通过使草莓植株上成熟的果实都能被采摘干净,从而提高了草莓园的收获量,同时,也避免出现成熟果实未及时采摘腐坏在园中的情况,从而避免了浪费,也降低了草莓果实腐败引起草莓病害的可能,通过使用水平轨板602、移板604和竖直轨板603相互配合,调节气枪609的前后上下位置,通过使用连接板605、一级悬臂606、二级悬臂607和三级悬臂608相互配合,调节气枪609的朝向、位置和角度,从而使
该设备的使用更加灵活,同时,使该设备气枪609位置定位的更加准确,进而使气枪609对草莓植株的吹风效果更好,通过气枪609吹风方式将草莓植株叶片拨开,不会对草莓植株的根茎造成损伤,从而进一步提高该设备使用的可靠性,同时,通过吹风方式能够在将草莓叶片吹向一边的同时,保证草莓果实位置不会发生改变,且不会对草莓果实造成损伤。
34.本发明实施例的一个可选实施方式中,行走底板1的四角均通过螺栓铰接配合有支撑腿101,四个支撑腿101均能够通过拧松螺栓转动以及拧紧螺栓固定,四个支撑腿101远离行走底板1的一端向下铰接有第一安装板102,四个第一安装板102的顶部均设有驱动第一安装板102转动的第一电机103,四个第一安装板102的一侧均转动配合有行走轮104,四个行走轮104一侧中心均安装有驱动行走轮104转动的第二电机105,通过将行走轮104安装在支撑腿101上,并通过铰接的方式安装支撑腿101,使支撑腿101通过拧松螺栓可以调节,进而使该设备两侧行走轮104之间的距离可以调节,通过调节该设备两侧行走轮104之间的距离,使该设备能够在垄距不同的草莓园行走采摘,进而使该设备对草莓园种植地形的适应性更强,从而提高该设备适用性,同时,通过拧紧螺栓能够将支撑腿101固定,使该设备不会因支撑腿101出现晃动,通过在每个第一安装板102上均安装第一电机103,使该设备的四个行走轮104均能独立转向,进而使该设备的转向调节更加灵活,通过使用四个第二电机105进行驱动,使该设备的四个行走轮104均能独立转动,配合独立转向功能,进一步提高该设备转向调节以及行进操控的灵活性。
35.本发明实施例的一个可选实施方式中,支撑台2一端靠近底部处平齐设置有若干个托板205,若干个托板205远离支撑台2一端的顶部向上均焊接有呈“t”字型结构的卡板206,若干个托板205顶部放置有存放盒3,若干个卡板206和支撑台2卡紧存放盒3,通过设置托板205承载存放盒3,一方面,更换存放盒3比较方便,为使用该设备带来便利,另一方面,通过更换存放盒3避免了倾倒草莓果实这一过程,进而有效减低草莓果实的损伤,同时,也使得存放盒3更换更加快捷,保证采摘过程不会中断,从而进一步提高该设备的采摘效率。
36.本发明实施例的一个可选实施方式中,支撑台2的一侧开设有若干个滑道201,若干个滑道201内均设置有滑杆202和弹簧203,若干个弹簧203分别套设在若干个滑杆202上,若干个滑杆202一端均滑动配合有伸缩筒204,若干个弹簧203的端部分别与若干个滑道201的里侧内壁固定连接,若干个弹簧203的另一端部分别与若干个伸缩筒204端部固定连接,若干个托板205分别水平焊接在若干个伸缩筒204上,且若干个托板205通过若干个伸缩筒204分别抽拉配合在若干个滑道201内,通过设置弹簧203拉动托板205,一方面,使托板205在不用使可以收纳起来,配合采摘组件5的折叠,使该设备在不使用时体积更小,方便该设备的移动和收纳,另一方面,使托板205端部的卡板206能够紧紧挤压存放盒3,保证存放盒3放置的稳定性,从而进一步提高该设备使用的可靠性,同时,也使得托板205能够放置不同型号的存放盒3,使该设备兼容性更强。
37.本发明实施例的一个可选实施方式中,旋转底座4包括固定底板401、旋转板402和第三电机403,固定底板401通过螺栓固定在支撑台2顶部,旋转板402转动配合在固定底板401顶部,固定底板401顶部中心安装有驱动旋转板402转动的第三电机403,支撑座501通过螺栓安装在旋转板402顶部,通过设置旋转底座4,调节吹风组件6和采摘组件5的角度,方便对不同区域的草莓进行采摘,同时也实现将采摘的草莓自动放入存放盒3中。
38.本发明实施例的一个可选实施方式中,支撑座501一侧安装有驱动一级力臂502转
动的第四电机503,二级力臂504上安装有驱动二级力臂504转动的第五电机505,二级力臂504靠近三级力臂506一端安装有驱动三级力臂506转动的第六电机507,第二安装板508远离电动夹爪509一侧安装有驱动电动夹爪509转动的第七电机510,一级力臂502由两个平行钢板组成,两个平行钢板之间的距离大于支撑柱601的宽度,保证一级力臂502收回时,不会被支撑柱601阻挡,一级力臂502的长度小于支撑柱601的高度,一级力臂502的长度大于二级力臂504的长度,二级力臂504的长度大于三级力臂506的长度,使采摘组件5端部的调节更加精细,使设备采摘定位的更加精准。
39.本发明实施例的一个可选实施方式中,水平轨板602的一侧水平焊接有两个第一滑轨6021和一个第一齿板6022,移板604靠近水平轨板602的一侧焊接有两个分别与两个第一滑轨6021滑动配合的第一滑块6041,移板604靠近水平轨板602的一侧转动配合有与第一齿板6022啮合的第一齿轮6042,移板604远离水平轨板602的一侧安装有驱动第一齿轮6042转动的第八电机6043,竖直轨板603的一侧竖直焊接有两个第二滑轨6031和一个第二齿板6032,移板604靠近竖直轨板603的一侧焊接有两个分别与两个第二滑轨6031滑动配合的第二滑块6044,移板604靠近竖直轨板603的一侧转动配合有与第二齿板6032啮合的第二齿轮6045,移板604远离竖直轨板603的一侧安装有驱动第二齿轮6045的第九电机6046,通过使用第一滑块6041和第一滑轨6021滑动配合,使用第二滑块6044和第二滑轨6031滑动配合,使吹风组件6水平方向以及上下方向调节的更加平滑流畅,从而提高该设备使用的稳定性。
40.本发明实施例的一个可选实施方式中,连接板605底部安装有驱动连接板605转动的第十电机6051,连接板605一侧安装有驱动一级悬臂606转动的第十一电机6052,一级悬臂606一侧安装有驱动二级悬臂607转动的第十二电机6061,二级悬臂607一侧安装有驱动三级悬臂608转动的第十三电机6071。
41.本发明实施例的一个可选实施方式中,支撑台2上安装有控制箱7,控制箱7内设置有plc控制器(型号:s7-300),控制箱7外侧壁设置有控制按钮和显示屏,控制箱7的顶部安装有为plc控制器提供通信的无线路由器(型号:f-nr300),plc控制器可通过后台控制命令,行走底板1周侧安装有若干个摄像头8,若干个摄像头8通过无线路由实时传递视频到后台,第二安装板508靠近电动夹爪509的一侧安装有识别成熟草莓的视觉传感器(型号:in-sight 2000),该设备通过使用摄像头8和控制箱7,实现自动寻路,进而使该设备实现无人驾驶,从而使该设备的使用更加智能化,同时,通过控制箱7和摄像头8智能化控制行进路线,使该设备在草莓园的行进路线更加精准,进而能够减少设备移动过程中对草莓苗造成的伤害,从而提高该设备使用的可靠性,通过使用视觉传感器配合控制箱7中的plc控制器,使该设备自动进行识别采摘,从而进一步提高该设备智能化程度。
42.本发明实施例的一个可选实施方式中,该智能收获采摘设备的采摘方法具体包括以下步骤:步骤一:通过第二电机105带动,使行走轮104转动,通过转动行走轮104,使该设备在草莓园移动,通过摄像头8实时拍摄并识别确定该设备行进路线,通过控制箱7控制该设备的第一电机103,使第一电机103带动行走轮104转向,对设备的行进路线进行调整;步骤二:通过行走底板1周侧安装的摄像头8确定草莓植株的位置,通过控制箱7中的plc控制器进行控制第八电机6043、第九电机6046、第十电机6051、第十一电机6052、第十二电机6061和第十三电机6071,通过第八电机6043带动,使第一齿轮6042转动,第一齿轮
6042通过与第一齿板6022啮合,使移板604水平移动,通过水平移动移板604,调节气枪609的水平位置,通过第九电机6046带动,使第二齿轮6045转动,第二齿轮6045通过与第二齿板6032啮合,使竖直轨板603上下移动,通过上下移动竖直轨板603,调节气枪609的高度,通过第十电机6051带动,使连接板605转动,通过转动连接板605,调节气枪609的朝向,通过第十一电机6052、第十二电机6061和第十三电机6071带动,使一级悬臂606、二级悬臂607和三级悬臂608转动,通过转动一级悬臂606、二级悬臂607和三级悬臂608转动,调节气枪609的位置以及角度,将气枪609调节正对需要采摘的草莓植株,通过气枪609吹气,将草莓植株的叶片吹向一边;步骤三:通过行走底板1周侧安装的摄像头8确定吹风组件6吹风的草莓植株的位置,通过控制箱7中的plc控制器进行控制第四电机503、第五电机505、第六电机507和第七电机510,通过第四电机503、第五电机505和第六电机507带动,使一级力臂502、二级力臂504和三级力臂506转动,通过转动一级力臂502、二级力臂504和三级力臂506,调节电动夹爪509的位置以及角度,并通过第二安装板508端部的视觉传感器识别出成熟的草莓果实,根据视觉传感器测量的数据,由控制箱7中的plc控制器控制采摘组件5,使电动夹爪509移向成熟的草莓果实,并通过电动夹爪509将成熟草莓果实夹持,通过第七电机510带动,使电动夹爪509转动,将成熟的草莓果实采摘下来,通过第三电机403带动,使采摘组件5转动,将采摘组件5转向存放盒3的方向,将电动夹爪509移向存放盒3,将采摘的草莓果实放入存放盒3中,完成草莓的采摘。
43.在使用时,首先,通过第二电机105带动,使行走轮104转动,通过转动行走轮104,使该设备在草莓园移动,通过摄像头8实时拍摄并识别确定该设备行进路线,通过控制箱7控制该设备的第一电机103,使第一电机103带动行走轮104转向,对设备的行进路线进行调整,该设备通过使用摄像头8和控制箱7,实现自动寻路,进而使该设备实现无人驾驶,从而使该设备的使用更加智能化,同时,通过控制箱7和摄像头8智能化控制行进路线,使该设备在草莓园的行进路线更加精准,进而能够减少设备移动过程中对草莓苗造成的伤害,从而提高该设备使用的可靠性,通过将行走轮104安装在支撑腿101上,并通过铰接的方式安装支撑腿101,使支撑腿101通过拧松螺栓可以调节,进而使该设备两侧行走轮104之间的距离可以调节,通过调节该设备两侧行走轮104之间的距离,使该设备能够在垄距不同的草莓园行走采摘,进而使该设备对草莓园种植地形的适应性更强,从而提高该设备适用性,同时,通过拧紧螺栓能够将支撑腿101固定,使该设备不会因支撑腿101出现晃动,通过在每个第一安装板102上均安装第一电机103,使该设备的四个行走轮104均能独立转向,进而使该设备的转向调节更加灵活,通过使用四个第二电机105进行驱动,使该设备的四个行走轮104均能独立转动,配合独立转向功能,进一步提高该设备转向调节以及行进操控的灵活性,然后,通过行走底板1周侧安装的摄像头8确定草莓植株的位置,通过控制箱7中的plc控制器进行控制第八电机6043、第九电机6046、第十电机6051、第十一电机6052、第十二电机6061和第十三电机6071,通过第八电机6043带动,使第一齿轮6042转动,第一齿轮6042通过与第一齿板6022啮合,使移板604水平移动,通过水平移动移板604,调节气枪609的水平位置,通过第九电机6046带动,使第二齿轮6045转动,第二齿轮6045通过与第二齿板6032啮合,使竖直轨板603上下移动,通过上下移动竖直轨板603,调节气枪609的高度,通过第十电机6051带动,使连接板605转动,通过转动连接板605,调节气枪609的朝向,通过第十一电机6052、
第十二电机6061和第十三电机6071带动,使一级悬臂606、二级悬臂607和三级悬臂608转动,通过转动一级悬臂606、二级悬臂607和三级悬臂608转动,调节气枪609的位置以及角度,将气枪609调节正对需要采摘的草莓植株,通过气枪609吹气,将草莓植株的叶片吹向一边,该设备通过使用吹风组件6,将草莓植株的叶片吹向一边,使草莓果实能够暴露出来,通过将草莓果实暴露出来,一方面,方便该设备的采摘部件进行采摘,降低草莓叶片对采摘作业的干扰,进而有效避免采摘草莓果实时误伤草莓植株,进而对草莓植株起到一种保护作用,从而进一步提高该设备使用的可靠性,同时,也能减少采摘下来的草莓果实中的杂质,使采摘的草莓果实更加干净,另一方面,使该设备的采摘部件定位草莓果实更加简单,采摘时减少遗漏,从而使每个草莓植株上成熟的果实都能被采摘的干净彻底,通过使草莓植株上成熟的果实都能被采摘干净,从而提高了草莓园的收获量,同时,也避免出现成熟果实未及时采摘腐坏在园中的情况,从而避免了浪费,也降低了草莓果实腐败引起草莓病害的可能,通过使用水平轨板602、移板604和竖直轨板603相互配合,调节气枪609的前后上下位置,通过使用连接板605、一级悬臂606、二级悬臂607和三级悬臂608相互配合,调节气枪609的朝向、位置和角度,从而使该设备的使用更加灵活,同时,使该设备气枪609位置定位的更加准确,进而使气枪609对草莓植株的吹风效果更好,通过气枪609吹风方式将草莓植株叶片拨开,不会对草莓植株的根茎造成损伤,从而进一步提高该设备使用的可靠性,同时,通过吹风方式能够在将草莓叶片吹向一边的同时,保证草莓果实位置不会发生改变,且不会对草莓果实造成损伤,最后,通过行走底板1周侧安装的摄像头8确定吹风组件6吹风的草莓植株的位置,通过控制箱7中的plc控制器进行控制第四电机503、第五电机505、第六电机507和第七电机510,通过第四电机503、第五电机505和第六电机507带动,使一级力臂502、二级力臂504和三级力臂506转动,通过转动一级力臂502、二级力臂504和三级力臂506,调节电动夹爪509的位置以及角度,并通过第二安装板508端部的视觉传感器识别出成熟的草莓果实,根据视觉传感器测量的数据,由控制箱7中的plc控制器控制采摘组件5,使电动夹爪509移向成熟的草莓果实,并通过电动夹爪509将成熟草莓果实夹持,通过第七电机510带动,使电动夹爪509转动,将成熟的草莓果实采摘下来,通过第三电机403带动,使采摘组件5转动,将采摘组件5转向存放盒3的方向,将电动夹爪509移向存放盒3,将采摘的草莓果实放入存放盒3中,完成草莓的采摘,该设备通过使用一级力臂502、二级力臂504和三级力臂506相互配合,使电动夹爪509的位置以及角度调节的更加灵便,从而进一步提高该设备使用的灵活性,通过将吹风组件6安装在采摘组件5的支撑座501上,使吹风组件6与采摘组件5转向保持同步,通过使吹风组件6与采摘组件5转向保持同步,使该设备部件的配合更加协调,同时,使采摘组件5和吹风组件6的配合的更加紧密,减少采摘组件5与吹风组件6作业的间隔时间,进而提高采摘组件5和吹风组件6整体的速度,从而有效提高该设备使用的效率,通过使用视觉传感器配合控制箱7中的plc控制器,使该设备自动进行识别采摘,从而进一步提高该设备智能化程度,通过设置托板205承载存放盒3,一方面,更换存放盒3比较方便,为使用该设备带来便利,另一方面,通过更换存放盒3避免了倾倒草莓果实这一过程,进而有效减低草莓果实的损伤,同时,也使得存放盒3更换更加快捷,保证采摘过程不会中断,从而进一步提高该设备的采摘效率,通过设置弹簧203拉动托板205,一方面,使托板205在不用使可以收纳起来,配合采摘组件5的折叠,使该设备在不使用时体积更小,方便该设备的移动和收纳,另一方面,使托板205端部的卡板206能够紧紧挤压存放盒3,保证存放盒3放置的稳
定性,从而进一步提高该设备使用的可靠性,同时,也使得托板205能够放置不同型号的存放盒3,使该设备兼容性更强。
44.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施方式和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入本发明要求保护的范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1