运动手环及其与乒乓球发球机器人的交互系统的制作方法
1.本实用新型属于机器人技术领域,具体涉及一种运动手环及其与乒乓球发球机器人的交互系统。
背景技术:
2.随着社会的发展和科技的进步,运动手环作为当下最为时尚的运动监测电子产品受到越来越多人的青睐。然而,现有的运动手环主要用于检测佩戴者的活动情况,例如,计量佩戴者行走的步数以及检测佩戴者夜晚的睡眠情况,并未将检测到的数据用于其他智能设备的控制过程中,不能进一步拓展采集到的数据的应用范围。另外,现有的运动手环的使用缺乏交互感,互动性低。
技术实现要素:
3.为至少在一定程度上克服相关技术中存在的问题,本实用新型提供了一种运动手环及其与乒乓球发球机器人的交互系统。
4.根据本实用新型实施例的第一方面,本实用新型提供了一种运动手环,其用于与乒乓球发球机器人进行交互中,包括腕带以及设置在所述腕带上的手环主体;
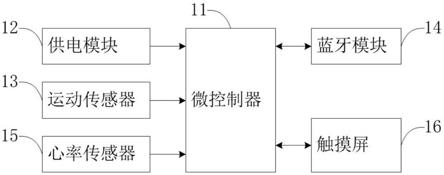
5.所述手环主体中设置有微控制器以及与所述微控制连接的供电模块、运动传感器和蓝牙模块;所述运动传感器用于检测佩戴者手部的加速度和角速度信息并发送给所述微控制器;所述微控制器用于通过所述蓝牙模块向乒乓球发球机器人发送控制信号。
6.上述运动手环中,所述供电模块包括发电组件和整流电路;所述发电组件包括空心铁芯、滑轨、线圈和永磁体,所述空心铁芯套设在所述滑轨上,且所述空心铁芯的内表面与所述滑轨的外表面相匹配;所述线圈缠绕在所述空心铁芯的外表面;所述空心铁芯、滑轨和线圈位于所述永磁体的n极和s极之间,且所述永磁体的n极和s极的连线与所述滑轨垂直;
7.所述线圈的两端均与整流电路的输入端连接,所述整流电路的输出端与所述微控制器、运动传感器和蓝牙模块连接。
8.进一步地,所述供电模块还包括可充电纽扣电池,所述可充电纽扣电池的正负极与所述整流电路的输出端连接。
9.更进一步地,所述手环主体上设置有充电口,通过所述充电口为所述可充电纽扣电池进行充电。
10.上述运动手环中,所述微控制器采用型号为stm32f103rct6的处理器。
11.上述运动手环中,所述运动传感器采用型号为mpu6050的运动处理组件,所述mpu6050通过3轴陀螺仪和3轴加速度计在x轴、y轴和z轴的三个维度上检测佩戴者手部的动作。
12.上述运动手环中,还包括心率传感器和触摸屏,所述心率传感器和触摸屏均与所述微控制器连接。
13.进一步地,所述心率传感器采用型号为max30102的iic接口的低功耗的心率传感器芯片。
14.根据本实用新型实施例的第二方面,本实用新型提供了一种运动手环与乒乓球发球机器人的交互系统,其包括上述任一项所述的运动手环和乒乓球发球机器人,所述运动手环中设置的所述蓝牙模块为第一蓝牙收发器,所述乒乓球发球机器人中设置有第二蓝牙收发器和机器人控制器,所述第二蓝牙收发器和机器人控制器连接;
15.所述运动传感器将采集到的运动数据传输至所述微控制器,所述微控制器生成所述乒乓球发球机器人的控制信号,并通过所述第一蓝牙收发器发送给所述第二蓝牙收发器;
16.所述第二蓝牙收发器接收所述第一蓝牙收发器发送的控制信号,并传输至所述机器人控制器;所述机器人控制器用于控制所述乒乓球发球机器人动作。
17.上述运动手环与乒乓球发球机器人的交互系统中,还包括智能终端,所述智能终端上设置有第三蓝牙收发器;所述第三蓝牙收发器与第一蓝牙收发器和第二蓝牙收发器分别进行通信连接。
18.根据本实用新型的上述具体实施方式可知,至少具有以下有益效果:本实用新型提供的运动手环能够与乒乓球发球机器人进行交互,拓宽了运动手环的应用范围,增强了互动性和娱乐性。
19.本实用新型提供的运动手环通过设置发电组件能够大幅提升运动手环的续航能力,避免用户外出时还需要携带充电宝等充电设备,能够进一步提升运动手环的便携性;且能够节约能源。
20.本实用新型提供的运动手环与乒乓球发球机器人的交互系统能够实现运动手环、乒乓球发球机器人和智能终端三者之间或两两之间的交互,方便用户使用。
21.应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本实用新型所欲主张的范围。
附图说明
22.下面的所附附图是本实用新型的说明书的一部分,其示出了本实用新型的实施例,所附附图与说明书的描述一起用来说明本实用新型的原理。
23.图1为本实用新型具体实施方式提供的一种运动手环的电路框图。
24.图2为本实用新型具体实施方式提供的运动手环中发电组件的原理图。
25.图3为本实用新型具体实施方式提供的一种运动手环与乒乓球发球机器人的交互系统结构框图。
26.附图标注说明:
27.1、运动手环;
28.11、微控制器;
29.12、供电模块;121、空心铁芯;122、滑轨;123、线圈;124、永磁体;
30.13、运动传感器;14、蓝牙模块;15、心率传感器;16、触摸屏;
31.2、乒乓球发球机器人;
32.3、智能终端。
具体实施方式
33.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本实用新型相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本实用新型的一些方面相一致的装置和方法的例子。
34.如图1所示,本实用新型提供的运动手环主要用于与乒乓球发球机器人的交互过程中,其包括腕带以及设置在腕带上的手环主体。其中,手环主体中设置有微控制器11以及与微控制连接的供电模块12、运动传感器13和蓝牙模块14。运动传感器13用于检测佩戴者手部的加速度和角速度信息并发送给微控制器11。微控制器11根据接收到的加速度和角速度信息识别出佩戴者的运动状态和手势,生成乒乓球发球机器人的控制信号,并将控制信号通过蓝牙模块14发送给乒乓球发球机器人。乒乓球发球机器人根据接收到的控制信号和预设的发球模式切换发球落点、球速、旋转和发球频率等。
35.在一个具体的实施例中,如图2所示,供电模块12包括发电组件和整流电路(图中未示出),其中,发电组件包括空心铁芯121、滑轨122、线圈123和永磁体124。空心铁芯121套设在滑轨122上,且空心铁芯121的内表面与滑轨122的外表面相匹配。线圈123缠绕在空心铁芯121的外表面。空心铁芯121、滑轨122和线圈123位于永磁体124的n极和s极之间,且永磁体124的n极和s极的连线与滑轨122垂直。线圈123的两端均与整流电路的输入端连接,整流电路的输出端与微控制器11、运动传感器13和蓝牙模块14连接,以为微控制器11、运动传感器13和蓝牙模块14提供所需的供电电压。
36.佩戴者在挥动或摆动手臂时,会带动手环主体内的空心铁芯121在滑轨122做往复运动,从而使得空心铁芯121外表面的线圈123切割磁感线发电,产生的交流电通过整流模块整流后变成直流电,以对运动手环进行供电。
37.本实用新型通过在手环主体中设置发电组件,能够大幅提升运动手环的续航能力,避免用户外出时还需要携带充电宝等充电设备,能够进一步提升运动手环的便携性。
38.在本实施例中,供电模块12还包括可充电纽扣电池,可充电纽扣电池的正负极与整流电路的输出端连接,发电组件发的电通过整流电路整流后变为稳定的直流电存储在可充电纽扣电池内,进而为运动手环供电。
39.在本实施例中,手环主体上设置有充电口,可以利用充电器和充电口为可充电纽扣电池进行充电。
40.在一个具体的实施例中,微控制器11可以采用型号为stm32f103rct6的处理器。运动传感器13可以采用型号为mpu6050的运动处理组件。mpu6050通过3轴陀螺仪和3轴加速度计在x轴、y轴和z轴的三个维度上检测佩戴者手部的动作,判断佩戴者手势的摆动和转动。其中,佩戴者的摆动主要为手臂的上下左右摆动,依靠加速度的变化进行判断;佩戴者的转动主要为手腕的转动,依靠角速度的变化进行判断。运动传感器13将检测到的佩戴者手部的加速度和角速度信息发送给微控制器11,由微控制器11识别出佩戴者的运动状态和手势,生成乒乓球发球机器人的控制信号,生成的控制信号通过蓝牙模块14发送给乒乓球发球机器人。
41.在另一个实施例中,本实用新型提供的运动手环还包括心率传感器15和触摸屏16,心率传感器15和触摸屏16均与微控制器11连接。心率传感器15用于检测佩戴者的心率
变化,并将检测到的心率变化数据发送给微控制器11,由微控制器11控制触摸屏16进行显示。具体地,心率传感器15可以采用型号为max30102的iic接口的低功耗的心率传感器芯片,其具有功耗低、成本低、工作可靠等特点。型号为max30102的芯片通过iic接口与微控制器11连接。
42.基于本实用新型实施例提供的运动手环,如图3所示,本实用新型还提供了一种运动手环与乒乓球发球机器人的交互系统,其包括上述运动手环1和乒乓球发球机器人2,运动手环1包括手环主体,手环主体上设置的蓝牙模块14为第一蓝牙收发器,乒乓球发球机器人2中设置有第二蓝牙收发器和机器人控制器,第二蓝牙收发器和机器人控制器连接。
43.运动传感器13将采集到的运动数据传输至微控制器11,微控制器11生成乒乓球发球机器人2的控制信号,并通过第一蓝牙收发器发送给第二蓝牙收发器。
44.第二蓝牙收发器接收第一蓝牙收发器发送的控制信号,并传输至机器人控制器。机器人控制器用于控制乒乓球发球机器人2动作。
45.如图3所示,本实用新型提供的运动手环与乒乓球发球机器人的交互系统还包括智能手机、平板电脑等智能终端3,
46.智能终端3上设置有第三蓝牙收发器。第三蓝牙收发器与第一蓝牙收发器进行通信连接。即智能终端3上的第三蓝牙收发器可以将控制信号发送给运动手环1上的第一蓝牙收发器,从而实现对运动手环1的控制。该控制可以是设置手环时间、闹钟、事件提醒等。
47.运动手环1内的运动传感器13用于收集人体运动数据,然后利用微控制器11对采集到的原始运动数据进行运动分析,记录使用者的运动情况,如行走步数、运动时间、消耗热量、睡眠记录、bmi等。可以通过智能终端3控制运动手环1震动,以实现事件提醒功能,如来电提醒、运动提醒等。
48.第三蓝牙收发器与第二蓝牙收发器进行通信连接,机器人控制器根据智能终端3通过第三蓝牙收发器发送的信号控制乒乓球发球机器人2。乒乓球发球机器人2将发球落点、球速、旋转和发球频率等信息通过第二蓝牙收发器反馈给智能终端3,反馈的信息可以帮助操作者用智能终端3对乒乓球发球机器人2进行更精准的控制。
49.本实用新型提供的运动手环扩展了运动手环1的使用范围,增强了互动性。
50.需要说明的是,本实用新型涉及的功能、算法、方法等仅仅是现有技术的常规适应性应用,例如,微控制器11生成乒乓球发球机器人的控制信号的过程为现有技术的常规适应性应用。因此,本实用新型对于现有技术的改进,实质在于硬件之间的连接关系,而非针对功能、算法、方法本身,也即本实用新型虽然涉及一点功能、算法、方法,但并不包含对功能、算法、方法本身提出的改进。本实用新型对于功能、算法、方法的描述,是为了更好地说明本实用新型,以便更好地理解本实用新型。
51.可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
52.需要说明的是,在本实用新型的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是指至少两个。
53.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特
点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
54.尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1