操控装置的制作方法
[0001]
本发明涉及一种操控装置,具体涉及用于微创手术的操控装置。
背景技术:
[0002]
手术钳属于外科手术器械,常用于内窥镜手术。传统的腔镜手术 钳是将刀类、剪类、钳类、针线类等功能单元固定在一根刚性直杆末 端,并通过另一端的手持部分进行操作,通常只有一个活动自由度, 即功能单元的张合。由于连接功能单元的直杆末端是刚性的,因此此 类手术钳的末端局部自由度十分有限,极大的降低了操作灵活度。为 了提高手术钳的操作自由度,研究者提出了配合机器人微创手术的多 自由度手术钳,该类手术钳通过增加末端活动关节以增加活动自由度。 然而,自由度越多,活动关节越多,从而使得整体尺寸以及控制难度 大大增加。同时,为了保证手术钳的操作精度,需要定期更换手术钳, 这使得手术成本增加。如达芬奇手术机器人的手术臂直径为5mm/或 8mm,每条手术臂使用次数限制为10次。而对于神经外科手术以及儿 科手术,由于操作空间有限,通常要求手术钳尺寸在保证操作灵活度 的前提下尽量小。
[0003]
因此,有必要提供一种用于微创手术中的、结构简单且操控灵活 的操控装置。
技术实现要素:
[0004]
根据一个方面,本发明提供一种操控装置,包括:本体,可移动 地穿设于所述本体的传动件,固定于所述传动件第一端的执行件,及 固定于所述传动件第二端的控制件。所述传动件的第一端从所述本体 的第一端延伸至所述本体外部,所述传动件的第二端从所述本体的第 二端延伸至所述本体外部。所述控制件相对于所述本体的位移带动所 述传动件相对于所述本体位移,所述传动件相对于所述本体的位移继 而带动所述执行件相对于所述本体位移。
[0005]
根据一个优选方案,所述本体具有沿纵向方向在所述本体的第一 端和第二端之间延伸的通道,所述至传动件可移动地穿设于所述通道。
[0006]
根据一个优选方案,所述通道包括相互独立的第一通道、第二通 道、第三通道及第四通道,所述传动件包括第一传动件、第二传动件、 第三传动件及第四传动件,所述第一传动件、第二传动件、第三传动 件及第四传动件分别可移动地穿设于所述第一通道、第二通道、第三 通道及第四通道。
[0007]
根据一个优选方案,所述通道包括位于所述本体第一端的第一开 口、位于所述本体第二端的第二开口,及位于所述第一端及所述第二 端之间的中间段,所述传动件包括分别从所述第一开口及所述第二开 口穿出所述本体的第一传动件、第二传动件、第三传动件及第四传动 件。
[0008]
根据一个优选方案,所述操控装置还包括固定于所述本体的第一 套管、第二套管、第三套管及第四套管,所述第一传动件、第二传动 件、第三传动件及第四传动件分别可移动地穿设于所述第一套管、第 二套管、第三套管及第四套管。
[0009]
根据一个优选方案,所述第一开口第一横向左开口、第一侧向左 开口、第一横向右开口及第一侧向右开口;所述第二开口包括第二横 向左开口、第二侧向左开口、第二横向右开口及第二侧向右开口;所 述第一传动件从所述第一横向左开口及所述第二横向左开口穿出所述 本体,所述第二传动件从所述第一侧向左开口及所述第二侧向左开口 穿出所述本体,所述第三传动件从所述第一横向右开口及所述第二横 向右开口穿出所述本体,所述第四传动件从所述第一侧向右开口及所 述第二侧向右开口穿出所述本体。
[0010]
根据一个替代方案,所述第一开口包括第一横向左开口、第一侧 向左开口、第一横向右开口及第一侧向右开口;所述第二开口包括第 二横向左开口、第二侧向左开口、第二横向右开口及第二侧向右开口; 所述第一传动件从所述第一横向左开口及所述第二横向右开口穿出所 述本体,所述第二传动件从所述第一侧向左开口及所述第二侧向右开 口穿出所述本体,所述第三传动件从所述第一横向右开口及所述第二 横向左开口穿出所述本体,所述第四传动件从所述第一侧向右开口及 所述第二侧向左开口穿出所述本体。
[0011]
根据一个优选方案,所述操控装置还包括固定于所述本体第二端 的支座,可枢转地连接于所述支座的支架,及可枢转地连接于所述支 架的手柄,其中所述控制件固定于所述手柄。
[0012]
根据一个优选方案,所述支架通过第一枢轴可枢转地连接于所述 支座,所述手柄通过第二枢轴可枢转地连接于所述支架,所述第二枢 轴与所述第一枢轴正交。
[0013]
根据一个优选方案,所述支架具有中空的芯部,所述控制件与所 述本体间隔设置,位于控制件与所述本体之间的传动件穿过所述支架 的中空芯部。
[0014]
根据一个优选方案,所述支架关于所述第一枢轴的转动使得所述 第一传动件、第二传动件、第三传动件及第四传动件中的至少一个传 动件沿所述本体位移。
[0015]
根据一个优选方案,所述手柄关于所述第二枢轴的转动使得所述 第一传动件、第二传动件、第三传动件及第四传动件中的至少一个传 动件沿所述本体位移。
[0016]
根据一个优选方案,所述操控装置还包括固定于所述本体的套管, 其中所述传动件可移动地穿设于所述套管。
[0017]
根据一个优选方案,所述本体的第一端朝向所述本体的第一轴向 方向,所述本体的第二端朝向所述本体的第二轴向方向,所述第二轴 向方向与所述第一轴向方向相反。
[0018]
根据一个替代方案,所述本体的第一端朝向所述本体的第一轴向 方向,所述本体的第二端朝向所述本体的第二轴向方向,所述第二轴 向方向与所述第一轴向方向相同。
附图说明
[0019]
当结合附图阅读时,将更好地理解前述发明内容以及本申请的实 施例的以下详细描述。出于解说本申请的方法和装置的目的,在附图 中示出代表性实施例。然而,应该理解,本申请不限于所示的特定方 法和装置。在附图中,相同的附图标记遍及各幅视图指代相同或功能 相似的元件。
[0020]
图1是根据本发明一实施例的操控装置的立体图;
[0021]
图2是图1所示操控装置的局部2的放大立体图;
[0022]
图3是图1所示操控装置的局部3的放大立体图;
[0023]
图4a是图1所示操控装置的本体的部分剖视立体图;
[0024]
图4b是图4a的仰视部分剖视立体图;
[0025]
图5是图4a所示操控装置的本体及穿设于本体的传动件的部分剖 视示意图;
[0026]
图6是图1所示操控装置的部分剖视立体图;
[0027]
图7是图6所示操控装置及安装于其上的工具部立体图;
[0028]
图8是图7所示操控装置的分解立体图;
[0029]
图9是图7所示操控装置的部件位移状态立体图;
[0030]
图10是根据一个替代方案操控装置的本体部分剖视立体图;
[0031]
图11是图10所示本体及安装于其上的传动件的部分剖视立体图;
[0032]
图12是根据本发明操控装置具有图10所示本体及传动件的部件 位移状态立体图;
[0033]
图13是根据本发明另一实施例操控装置的部件位移状态立体图;
[0034]
图14是图13操控装置的本体及传动件部分剖视分解立体图;
[0035]
图15a是根据本发明又一实施例操控装置的传动件及套管部分立 体图;
[0036]
图15b是图15a所示操控装置传动件及套管的部分剖视图;
[0037]
图16a是图15a所示操控装置传动件及套管根据一个方案安装于 本体的部分剖视立体图;
[0038]
图16b是图15a所示操控装置传动件及套管根据一个替代方案安 装于本体的部分剖视立体图;
[0039]
图17a是根据本发明又一实施例操控装置的立体图;
[0040]
图17b是图17a所示操控装置局部18的放大立体图;
[0041]
图17c是图17a所示操控装置的分解立体图;
[0042]
图18是图17a所示操控装置的操作部分的局部剖视立体图;
[0043]
图19是图18所示操控装置的操作部分的分解立体图;
[0044]
图20是图17a所示操控装置执行件及工具部改变方位之前的静态 局部剖视图;
[0045]
图21是图20所示操控装置执行件及工具部沿第一方向改变方位 之后的示意立体图;
[0046]
图22是图20所示操控装置执行件及工具部沿第二方向改变方位 之后的示意立体图;
[0047]
图23是根据本发明又一实施例操控装置及其操控示意图;
[0048]
图24是根据本发明又一实施例操控装置及其操控示意图;以及
[0049]
图25是根据本发明又一实施例操控装置及其操控示意图。
[0050]
具体实施方式及实施例详细说明
[0051]
除非另外指出,本文中所引用或参照的侧向方向x、横向方向y、 纵向方向z为如图1、图10、图17a、图18及图22所示的xyz坐标 系所示的方向,其中侧向方向x与横向方向y彼此垂直且均垂直于纵 向方向z。
[0052]
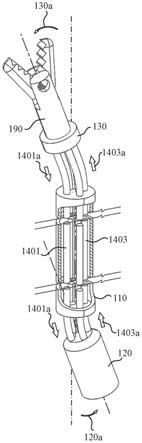
如图1至图5所示,根据一个实施例,本发明的操控装置100包 括本体110、控制件120、执行件130及传动件140(图4a)。本体 110是细长的柱体,具有沿纵向方向z在本体110的第一端112和第二 端116之间延伸的通道114。通道114在本体110的第一端112具有第 一开口,例如沿着平行于x-y平面且关于第一端112的几何中心周向 均匀分布的四个第一开
口,即第一横向左开口1121、第一侧向左开口 1122、第一横向右开口1123、第一侧向右开口1124;在本体110的第 二端116具有第二开口,例如沿着平行于x-y平面、关于第二端116 的几何中心周向均匀分布的四个第二开口,即第二横向左开口1161、 第二侧向左开口1162、第二横向右开口1163、第二侧向右开口1164。 传动件140可以包括第一传动件1401、第二传动件1402、第三传动件 1403和第四传动件1404。第一至第四传动件1401、1402、1403、1404 可以分别经四个第一开口1121、1122、1123、1124及四个第二开口1161、 1162、1163、1164穿出本体,即,第一传动件1401从第一横向左开口 1121及第二横向左开口1161贯穿本体110,第二传动件1402从第一 侧向左开口1122及第二侧向左开口1162贯穿本体110,第三传动件 1403从第一横向右开口1123及第二横向右开口1163贯穿本体110, 第四传动件1404从第一侧向右开口1124及第二侧向右开口1164贯穿 本体110。
[0053]
操控装置100还可以包括可拆卸地连接至执行件140的工具部 190。工具部190可以包括以下的至少一者或其组合:例如刀类、剪类、 钳类、针线类等。工具部分可以是手术用器械,例如图1至图3中所 示的手术夹钳190。
[0054]
如图4a、图4b及图5所示,通道114在本体110的第一端112 与第二端116之间的中间段可以是相互分隔开的独立通道,例如图4a 所示的四个独立通道,即第一通道1141、第二通道1142、第三通道1143、 第四通道1144。第一通道1141、第二通道1142、第三通道1143、第 四通道1144均与纵向z平行,每个传动件140可移动地穿设于通道 114。具体地,传动件140可以包括第一传动件1401、第二传动件1402、 第三传动件1403及第四传动件1404,分别穿设于第一通道1141、第 二通道1142、第三通道1143、第四通道1144,如图5所示。
[0055]
图6是根据本发明具有如图4及图5所示本体结构的操控装置的 局部剖视立体图。图7是图6所示操控装置安装有夹钳的局部剖视立 体图。图8是图7的分解立体图。图9是图7所示操控装置在夹钳改 变方位之后的局部剖视立体图。
[0056]
如图6至图8所示,控制件120位于邻近本体110的第一端112, 执行件130位于邻近本体110的第二端116。控制件120沿纵向方向z 与本体的第一端112间隔开第一间隙125,执行件130沿纵向方向z与 本体的第二端116间隔开第二间隙135。第一间隙125与第二间隙135 的长度可以相等也可以不等。传动件140穿设于本体110的通道,并 且传动件140的两端沿纵向方向z分别固定至执行件120和控制件 130,例如,控制件120的一侧和/或执行件130的一侧可以各自包括与 传动件140一一对应的孔道,用于容纳并固定传动件140。
[0057]
如图9所示,控制件120相对于本体110的位移,带动一个或多 个传动件140相对于本体110位移,继而带动执行件130以及与执行 件130连接的工具部190相对于本体110位移。根据一个具体示例, 控制件120相对于本体110延方向120a的转动,即如图9所示的逆时 针方向120a的转动,带动第一传动件1401相对于本体110向拉出执 行件130方向位移,同时带动第三传动件1403相对于本体110向推入 执行件方向位移。第一传动件1401及第三传动件1403的位移,同时 带动执行件130以及安装在执行件130上的手术夹钳190相对于本体110向与控制件120相同方向转动,即如图9所示的逆时针方向130a 转动。类似地,控制件120相对于本体110在xyz三维空间沿其他方 向的位移,将带动第一传动件1401、第二传动件1402、第三传动件1403 及第四传动件1404中的一个或多个相对于本体110的独立位移,继而 带动执行件130作与控制件120相同方向的相应位移。由此,控制件 120相对于本体110的位移,即通过第一传动件1401、第二传动件1402、 第三传动件1403及第四传动件1404
传递至执行件130,实现对手术夹 钳190的间隔距离操控。在本文中,术语“间隔距离操控”,指的是 本发明操控装置的执行件在相距控制件一定距离之外实现受控的位移 或动作。
[0058]
根据一个替代方案,如图10及图11所示,通道114在本体110 第一端112与第二端116之间的中间段可以是一个单膛的通道,在本 体110的中间段,第一传动件1401、第二传动件1402、第三传动件1403 及第四传动件1404处于一个共同空间。根据本方案,第一传动件1401、 第二传动件1402、第三传动件1403及第四传动件1404均沿纵向相互 平行地穿设于本体110。以第一传动件1401为例,该第一传动件1401 穿过本体110的第一端112的第一横向左开口1121及在对应位置的、 在中心纵轴110z同侧的、本体110第二端116的第二横向左开口1161。 第二传动件1402、第三传动件1403及第四传动件1404以相同的方式 及相对位置关系分别穿过本体110第一端112的第一侧向左开口1122、 第一横向右开口1123、第一侧向右开口1124,及本体110第二端116 的第二侧向左开口1162、第二横向右开口1163、第二侧向右开口1164。
[0059]
具有如图10及图11所示的本体110的操控装置,控制件120及 执行件130的位移方向与图9所示的方向相同。如图12所示,控制件 120相对于本体110延方向120a的转动,即如图12所示的逆时针方向 120a的转动,带动第一传动件1401相对于本体110向拉出本体110的 方向位移,同时带动第三传动件1403相对于本体110向推入本体110 的方向位移。第一传动件1401及第三传动件1403的位移,同时带动 执行件130以及安装在执行件130上的手术夹钳190相对于本体110 向与控制件120相同方向转动,即如图12所示的逆时针方向130a。类 似地,控制件120相对于本体110在xyz三维空间沿其他方向的位移, 将带动第一传动件1401、第二传动件1402、第三传动件1403及第四 传动件1404中的一个或多个相对于本体110的独立位移,继而带动执 行件130作相应位移。即此,控制件120相对于本体110的位移,即 通过第一传动件1401、第二传动件1402、第三传动件1403及第四传 动件1404传递至执行件130,实现对手术夹钳190的间隔距离操控。
[0060]
图13是根据本发明又一实施例的操控装置200的运动状态立体示 意图。图14是图13所示操控装置的部分剖视分解立体示意图。如图 14所示,操控装置200的本体210沿着平行于x-y平面且关于第一端 212的几何中心周向均匀分布有四个第一,即第一横向左开口2121、 第一侧向左开口2122、第一横向右开口2123及第一侧向右开口2124。 同时,本体210沿着平行于x-y平面且关于第二端216的几何中心周 向均匀分布有四个第二开口,即第二横向左开口2161、第二侧向左开 口2162、第二横向右开口2163及第二侧向右开口2164。第一传动件 2401、第二传动件2402、第三传动件2403及第四传动件2404在本体 210的第一端212分别穿过第一开口2121、2122、2123及2124。本体 210在位于第一端212与第二端216的中间段,具有单一的内膛214。 第一传动件2401、第二传动件2402、第三传动件2403及第四传动件 2404在内膛214中以交叉方式布设,即,穿过本体210第一端212的 第一横向左开口2121的第一传动件2401,在内膛214中改变方位,使 得第一传动件2401在本体210的第二端216从与第一横向左开口2121 关于纵轴210z对称的第二横向右开口2163穿出本体210。
[0061]
类似地,穿过本体210第一端212的第一侧向左开口2122的第二 传动件2402,在内膛214中改变方位,使得第二传动件2402在本体 210的第二端216从与第一侧向左开口2122关于纵轴210z对称的第二 侧向右开口2164穿出本体210。穿过本体210第一端212的第一横向 右开口2123的第三传动件2403,在内膛214中改变方位,使得第三传 动件2403在本体
370可相对于支座360关于一对第一枢轴356枢转。
[0067]
手柄380通过第二支架轴孔388、第二支座轴孔376及沿y方向 的一对第二枢轴358与支架370可枢转地连接,即,手柄380可相对 于支架370关于一对第二枢轴358枢转。
[0068]
本体310与支座360相对固定。本体310的第一端312位于一对 支座支柱364之间。执行件320与手柄380相对固定。执行件380位 于一对第二支柱384之间。连接于本体310与控制件320之间的传动 件340悬空设置于支架的中空芯部372。
[0069]
根据本实施例如上所述的结构,如图20、图21及图22所示,手 柄380带动支架370相对于本体310关于一对第一枢轴356枢转,带 动控制件320相对于本体310转动。控制件320的转动随之带动传动 件340相对于本体310位移。传动件340相对于本体310的位移则带 动执行件330以及安装于执行件330的手术器械390,沿与手柄380的 枢转方向相同或相反的方向转动,从而实现对手术器械390在y-z平 面的位移操控,如21所示。
[0070]
类似地,手柄380相对于本体310关于一对第二枢轴358的枢转, 带动控制件320相对于本体310转动。控制件320的转动随之带动传 动件340相对于本体310位移。传动件340相对于本体310的位移则 带动执行件330以及安装于执行件330的手术器械390,沿与手柄380 的枢转方向相同或相反的方向转动,从而实现对手术器械390在x-z 平面的位移操控,如22所示。
[0071]
手柄380相对于本体310关于一对第一枢轴356及一对第二枢轴 358的独立枢转的组合,则可以实现对手术器械390在x-y-z空间的 任意方位的操控。
[0072]
图23是根据本发明又一实施例的操控装置400的操控示意图。如 图23所示,操控装置400包括本体410、穿设于本体410的传动件440、 固定于传动件440一端的控制件420、固定于传动件440另一端的执行 件430、固定于本体410第一端的支座460、可枢转地连接于支座460 的支架470,以可枢转地连接于支架470的手柄480,以及固定于本体 410的握把450。握把450的一端沿纵向方向z+/z-固定于支座460并 且围绕至少一部分本体410的外周。握把450还可以包括两个扣手部 分452,用于辅助握持操控装置400及控制安装于执行件430的手术夹 钳490的开合。在图23所示的示例中,本体410的第一端412与第二 端416朝向相反方向,例如如图23所示的,本体410的第一端412朝 向操控装置400的后端方向z-,本体410的第二端416朝向操控装置 400的前端方向z+。使用时,操作者的拇指可以如图23所示从手柄480 的纵向后方对操控装置400进行操控,实现对本体410前端的执行件 430及手术夹钳490的方位变化控制。
[0073]
图24是根据本发明又一实施例的操控装置500的操控示意图。如 图23所示,操控装置500包括本体510、穿设于本体510的传动件540、 固定于传动件540一端的控制件520、固定于传动件540另一端的执行 件530、固定于本体510第一端的支座560、可枢转地连接于支座560 的支架570,以可枢转地连接于支架570的手柄580,以及固定于本体 510的握把550。握把570的一端沿纵向方向z+/z-固定于支座560并 且围绕至少一部分本体510的外周。在图24所示的示例中,本体510 的第二端516朝向操控装置500的前端方向z+。通过本体510的u形 弯曲,本体510的第一端512朝向与第二端516相同的方向,即,本 体510的第一端512及第二端516均朝向操控装置500的前端方向z+。 如此结构的操控装置500,适于使用者的手掌及食指、中指、无名指及 小指握持握把510,并使得使用者利用拇指操控手柄580,实现对本体 510前端的执行件530及手术夹钳590的方位变化控制。
[0074]
图25是根据本发明又一实施例的操控装置600的操控示意图。如 图25所示,操控装置600包括本体610、穿设于本体610的传动件640、 固定于传动件640一端的控制件620、固定于传动件640另一端的执行 件630、固定于本体610第一端的支座660、可枢转地连接于支座660 的支架670,以可枢转地连接于支架670的手柄680,以及固定于本体610的握把650。握把650的一端沿纵向方向z+/z-固定于支座660并 且围绕至少一部分本体610的外周。在图25所示的示例中,本体610 的第二端616从朝向操控装置600的前端方向z+向下方偏转一个锐角, 但仍大体上朝向操控装置600的前端方向z+。通过本体610的u形弯 曲,本体610的第一端612朝向与第二端616大致相同的方向,即, 本体610的第一端612也朝向操控装置600的前端方向z+。如此结构 的操控装置600,适于使用者将手腕固定于腕带652,并使得使用者可 以握持操控手柄680,实现对本体610前端的执行件630及手术夹钳 690的方位变化控制。
[0075]
为使描述简洁,未对上述实施例中的各个技术特征所有可能的替 换和/或组合进行描述,然而,只要这些技术特征的替换和/或组合不存 在矛盾,都应当理解为被本说明书记载的范围所涵盖。以上实施例仅 表达了本发明的几种实施方式,其中具体及详细的描述,不旨在被理 解为对本发明专利范围的限制。可以理解,可以在本申请的精神和原 理之内对各个实施例及其中的特征做出各种修改、替换、添加、删除 等而不超出本申请要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1