一种康复机械手多模态报警装置与方法
1.本发明专利涉及机械手运动监测领域,具体涉及一种康复机械手多模态报警装置与方法。
背景技术:
2.康复机械手替代康复治疗师对手部功能损伤患者进行手部康复治疗的过程中,机械手有可能对人体造成安全问题,比如:在手部关节运动机理中,指关节是有一定的可运动范围的,如超出可运动范围,则有可能会造成患者手部的损伤;另外,由于患者在治疗过程中,有可能会发生痉挛现象,如不采取保护措施,则会令患者手部的损伤程度更加严重;但现今的康复机械手无针对此两种情况做出相对应措施,所以特提出一种康复机械手多模态报警装置与方法,来确保患者的安全。
技术实现要素:
3.针对现有产品的不足,本发明专利提供了一种康复机械手多模态报警装置与方法,当指关节的角度运动范围或运动速率或关节压力超过阈值时,控制器激发蜂鸣器和发光二极管,发出声音报警及光报警并停止直线电机运动。
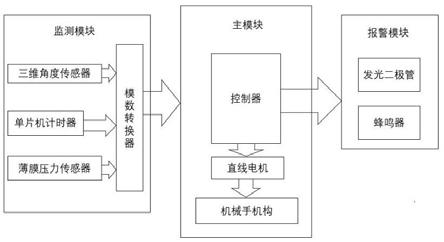
4.本发明专利提供一种康复机械手多模态报警装置与方法,包括了主模块和监测模块;主模块包括机械手机构、控制器、直线电机;监测模块包括薄膜压力传感器、三维角度传感器、单片机计时器、模数转换器;报警模块包括蜂鸣器和发光二极管。其中薄膜压力传感器套接在近指端,三维角度传感器搭载在近指端,薄膜压力传感器、三维角度传感器、单片机计时器与模数转换器相连,模数转换器相连与控制器相连。
5.可选的,监测模块对康复机械手指关节的运动角度、运动时间、关节压力进行采集,通过模数转换器将采集到的模拟信号转换为数字信号,传送给控制器,控制器将接收到的角度和时间信息运算为角度运动速率及运动范围信息,并与预先设置好的运动速率阈值、运动范围阈值及关节压力阈值进行比较,当运动速率或运动范围或关节压力超出阈值时,控制器停止直线电机运动,蜂鸣器发生报警声音,发光二极管发出光报警。
6.可选的,还包括报警模块,报警模块包括蜂鸣器和发光二极管,控制器分别与蜂鸣器和发光二极管电性连接。,报警模块中使用蜂鸣器和发光二极管进行报警,控制器在对接收到的运动范围、运动速率及关节压力进行阈值比对后,如超出阈值要求,报警模块报警。
7.一种康复机械手多模态报警方法,步骤方法:s1:控制器控制机械手辅助人体手指关节运动;s2:监测模块采集关节角度信息、时间信息及关节压力信息,传送到控制器;s3:控制器将接收到的数据与预先设置好的运动速率阈值、运动范围阈值和关节压力阈值进行比较并判断;s4:当运动范围或运动速率或关节压力其中之一超出阈值时,控制器激发蜂鸣器和发光二极管,发出声音报警及光报警并停止直线电机运动。
8.与现有技术相比,本发明具有以下的有益效果:本发明可对康复机械手的关节运动进行实时监测,可防止运动角度过大、运动速率过快及关节压力过大,并对医护人员提示,保障患者安全,避免对患者造成意外伤害。
附图说明
9.图1为本发明一种康复机械手多模态报警装置与方法的原理示意图;图2为本发明一种康复机械手多模态报警装置与方法的工作流程图;图3为本发明一种康复机械手多模态报警装置与方法的硬件装置示意图。
10.附图说明:001:直线电机;002:机械手机构;003:薄膜压力传感器;004:三维角度传感器。
具体实施方式
11.为了便于理解本发明,下面将结合附图和具体的实施例对本发明进行更全面的描述。附图中给出了本发明的较佳实施方式。但是,本发明可以以许多不同的形式来实现,并不限于本文所描述的实施方式。相反地,提供这些实施方式的目的是使对本发明的公开内容理解的更加透彻全面。
12.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
13.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。
14.下面结合附图对本发明专利进一步说明:如图1所示,其特征在于:包括了主模块、监测模块、报警模块等三大模块。所述的主模块包括机械手机构、stm32f103控制器、l12-30-100-12-i直线电机;监测模块包括fsr406薄膜压力传感器、gy-521三维角度传感器、单片机计时器、ads1115模数转换器;报警模块包括sfb-55蜂鸣器和发光二极管。其中fsr406薄膜压力传感器与指关节套接,gy-521三维角度传感器搭载在近指端,fsr406薄膜压力传感器、gy-521三维角度传感器、单片机计时器与模数转换器相连,模数转换器相连与stm32f103控制器相连,l12-30-100-12-i直线电机、sfb-55型蜂鸣器、发光二极管与stm32f103控制器相连。
15.监测模块中gy-521三维角度传感器对指关节的运动角度进行采集、单片机计时器对运动时间进行采集、fsr406薄膜压力传感器对关节压力进行采集,通过模数转换器将采集到的模拟信号转换为数字信号,传送给stm32f103控制器,其中,报警模块与stm32f103控制器相连。
16.使用时,stm32f103控制器根据设定的运动范围及运动速率参数推动l12-30-100-12-i电机,使机械手指关节运动,从而进行治疗;监测模块中,每隔1秒gy-521三维角度传感器采集运动角度信息、单片机计时器采集运动时间及fsr406薄膜压力传感器采集关节压力信息,通过模数转换器将模拟信号转换为数字信号,实时传输到stm32f103控制器;stm32f103控制器将接收到的运动角度信息及运动时间信息进行运算为当前指关节的运动
范围及运动速率,然后对运动速率阈值、运动范围阈值及关节压力阈值进行比较。
17.当运动范围或运动速率或关节压力其中之一超出阈值时,stm32f103控制器激发蜂鸣器和发光二极管,发出声音报警及光报警并停止直线电机运动。
18.以上内容仅仅为本发明的结构所作的举例和说明,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些显而易见的替换形式均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1