用于在锻炼机器的操作期间监测用户效率的方法和装置与流程
用于在锻炼机器的操作期间监测用户效率的方法和装置
1.本发明涉及一种用于在锻炼机器的循环操作期间监测用户效率的方法和装置。具有曲柄或类似肢体动力构件的锻炼机器包括但不限于自行车(可以是卧式和/或直立静态自行车、公路或越野自行车或双人自行车)、三轮车、上身锻炼机器、划艇、划船训练机器和脚踏轮桨船。
2.根据本发明的一个方面,提供一种在锻炼机器的循环操作期间监测用户效率的方法,所述锻炼机器具有经联接用于循环运动(cyclic movement)的一对人肢可操作的驱动构件,所述方法包括以下步骤:
3.(i)在所述驱动构件的循环运动期间测量和监测施加至所述驱动构件的驱动力,并且生成指示所述驱动力的一个或多个力信号;
4.(ii)使用一个或多个力信号得出所述驱动构件的每个运动循环的至少一个最大用户效率系数信号和至少一个最小用户效率系数信号,所述至少一个最大用户效率系数信号指示相对于在该运动循环中测得的最大力值的力变化,所述至少一个最小用户效率系数信号指示相对于在该运动循环中测得的最小力值的力变化;
5.(iii)使用在步骤(ii)中得出的所述最大用户效率系数信号和所述最小用户效率系数信号生成用户效率得分信号,所述用户效率得分信号指示在所述驱动构件的驱动循环运动中的用户效率;以及
6.(iv)在记录、显示、打印、存储、下载、上传或传输一个或多个标记(indicia)时,使用所述用户效率得分信号,所述一个或多个标记代表所述用户效率得分信号。
7.本发明允许计算可以显示给用户的用户效率得分。所述得分是这样的,使得在所述驱动构件的循环运动期间对于每个运动循环测得的最大和/或最小力值存在较大的力变化的情况下,所述得分被减小。所述得分可以被立即提供至锻炼机器的用户,该用户可以使用反馈来努力实现最佳效率。
8.优选地,测量和监测施加至所述驱动构件的所述驱动力的步骤(i)包括:周期性地使被可操作地联接至所述驱动构件的一个或多个力传感器生成所述一个或多个力信号。
9.方便地,所述一个或多个力传感器感测作用在由所述驱动构件驱动的驱动部件上或所述驱动部件中的力。
10.更方便地,所述驱动部件是驱动链,并且所述一个或多个力传感器测量所述驱动链中的张力并且生成指示所述张力的一个或多个信号。
11.优选地,所述力信号的生成周期为100hz。
12.在实施例中,所述步骤(ii)包括以下步骤:关于所述驱动构件中的一个的至少一个运动循环或其一部分,在此期间所述驱动构件提供所述驱动力的主要部分(dominant proportion),(iia)比较在所述至少一个运动循环或其一部分期间生成的多个周期性生成的力信号的大小与在所述运动循环或其一部分期间生成的最大大小的力信号,并且基于所述比较生成所述至少一个最大用户效率信号;以及(iib)比较在所述至少一个运动循环或其一部分期间生成的多个所述周期性生成的力信号的大小与在所述所述运动循环或其一部分期间生成的最小大小的力信号,并且基于所述比较生成所述至少一个最小用户效率信
号。
13.进一步优选地,所述方法可以包括关于另一个所述驱动构件的至少一个运动循环或其一部分,在此期间所述另一个驱动构件提供所述驱动力的主要部分,重复步骤(iia)和步骤(iib)。
14.常规地,效率是根据完成的工作与消耗的能量之比来计算的。在某些运动中,诸如耐力和其他形式的骑自行车、铁人三项、田径运动和许多形式的划船,通过节约能源或最大限度地利用每单位能量消耗所完成的工作来保持效率是成功的关键。
15.在骑自行车中,骑自行车的人传递到自行车踏板的力、扭矩或力量可以使用力踏板或物联化(即力或扭矩测量)曲柄来测量。作为一种“有效率的”技术,多年来一直在整个曲柄循环中围绕曲柄轴进行相对均匀的扭矩分配。
16.但是,仅了解效率并不像发现蹬踏技术的效率那样有价值。本发明允许评估(a)施加至锻炼机器的驱动构件的驱动力与(b)驱动构件的循环操作期间的使用者效率之间的关系,从而补充力、扭矩和/或力量测量,它们对教练和运动员更有用。
17.在骑自行车的过程中,平行于矢状面的下肢运动被自行车曲柄和踏板的几何形状限制为圆形路径。在这些限制条件下,有经验的骑自行车的人可以通过更改他/她下肢(例如大腿,小腿和足)的运动学和激活肌肉来改变他/她的蹬踏技术。可以通过测量关节运动学和肌肉激活模式来评估骑自行车的技术,但是这些类型的测量需要专用的设备,因此,通常仅适用于优秀运动员。
18.为了促进最佳的蹬踏技术,对于骑自行车的人来说,监测他/她在骑自行车时如何转动曲柄,以及接收关于起转/蹬踏(cranking/pedalling)技术的效率的即时实时反馈非常有用。当前的静态自行车可以实时地显示力量、心率和节奏数据以及某些其他骑自行车参数,从而为骑手提供深入而准确的反馈。当在装有物联化曲柄或力踏板的公路或越野自行车上骑行时,可获得类似的数据。心率数据可以通过多种方式生成,例如通过使用胸带传感器。类似的测量布置可以用在其他循环锻炼产品(例如,本文中列出的那些锻炼产品)中。
19.已知使用所谓的“极视图
tm
(polar view
tm
)”显示器或曲线图来提供有关骑自行车的人的起转或蹬踏技术的信息。极视图
tm
显示器是由申请人和关联实体开发的,并且仅由申请人的关联实体瓦特自行车有限公司(wattbike limited)销售。
20.极视图
tm
是根据在图1和图4所示的10和wattbike atom
tm 50静态自行车的传动系中以例如100hz采样率记录的力测量结果生成的。
21.图2中显示了一个示例极视图
tm 11,其中极格栅12代表10或wattbike atom
tm 50的踏板曲柄的360
°
循环运动。
22.格栅12的加厚部分12a、12b分别对应于10或wattbike atom
tm 50的左踏板和右踏板的下行程。曲线图线13的数量为多个,并且表示踏板曲柄的多次旋转。右侧部分13a中的曲线图线(图2中a
‑
a线的一侧)表示当施加至踏板曲柄的主要驱动力通过右曲柄施加时,在右曲柄的下行程期间施加至踏板曲柄的驱动力。左侧部分13b中的曲线图线(图2中的线a
‑
a的另一侧)表示当施加至踏板曲柄的主要驱动力通过左曲柄施加时,在左曲柄的下行程期间施加至踏板曲柄的驱动力。
23.众所周知,当在曲柄的完整360
°
旋转中每个曲柄从其上止点(tdc)位置行进大约1/3(通常与上止点位置在100
°
至120
°
之间)时,就会通过踏板曲柄施加最大力。在图2所示
的极视图
tm
中,最大力施加点由相对于右曲柄的线14和相对于左曲柄的线16示出。
24.极视图
tm 11可以使用打印机绘制,但是更常见的是通过实时显示器进行显示,该显示器被连接到10或wattbike atom
tm 50的电子设备,该显示器通过有线连接到电子设备或通过无线通信协议连接到电子设备。这样的显示器连续地更新。所显示的最大力角线14、16与曲线图线中最近完成的踏板旋转有关。
25.10或wattbike atom
tm 50的用户可以在锻炼时查看极视图
tm 11,并且可以实时地寻求通过改善极视图
tm 11数据的外观来优化他/她的蹬踏技术。
26.特别地,用户可以寻求以下一项或多项的改进:
27.·
使最大力角线14、16之间的夹角尽可能地接近180
°
,从而确保左腿和右腿之间的力的一致性。
28.·
使一方面极视图
tm
曲线图线13的最小力部分17、18与另一方面的平均力部分19之间的差异最小;和
29.·
(在短距离骑自行车的人的情况下,对于耐力骑自行车的人而言较不重要),通过使曲线图线13沿着最大力角线14、16尽可能远地到达,从而使曲线图线振幅(以及因此施加的最大力)最大化。
30.极视图
tm 11与产品10、50的其他功能一起被证明是一种高效的训练辅助工具。然而,通过使用极视图
tm
获得的反馈基本上是视觉的,因此依赖于用户或观看极视图
tm
数据的教练做出的估计。本发明在使用10或wattbike atom
tm 50期间有益地增加或取代了用户对极视图
tm
的依赖,因为它提供了指示用户蹬踏效率的即时得分,因此消除了对极视图
tm
视觉分析的需求,该视觉分析可能由于以下因素而不准确:
31.·
他/她评估他/她自己的表现时,用户的疲劳程度;
32.·
由于上述实时更新特性,某些极视图
tm 11数据是暂时的;和
33.·
长时间的努力使得很难集中精力观看极视图
tm 11显示器上的线条。
34.本发明还在多种其他循环锻炼或训练机器中或与之结合产生益处,包括但不限于本文所述的那些。
35.在优选的实施例中,人肢可操作的驱动构件被联接以用于循环运动,以驱动传递或消除循环作用力的传动系。
36.在这样的实施例中,可以通过测量在至少一个位置处在所述传动系中生成的力,测量和监测在所述驱动构件的循环运动期间施加至所述驱动构件的驱动力。
37.然而,在其他实施例中,可以通过使用力踏板和/或物联化曲柄,或者通过使用位于轮毂中或用户的鞋子、鞋垫或鞋子的可附接鞋钉中的测量设备来测量和监测在驱动构件的循环运动期间施加至驱动构件的驱动力。
38.本发明不限于用于静态自行车或甚至能够运动的更常规的自行车。相反,本发明的方法可以应用于具有成对的人肢可操作曲柄或其他肢体动力构件的所有人类动力锻炼机器,并且可以从中受益。例如,使用上身锻炼机器的运动员可能会受益于在进行上身健身时知晓这种机器的曲柄旋转的效率。与在游艇和橡皮艇、特别是用于竞赛的游艇和橡皮艇中遇到的手动操作的起锚机和绞盘(以及模拟此设备的动作的训练设备)有关,本发明也具有潜在的好处。此外,本发明在工作船和划船模拟器(诸如,所谓的“静态箱(static tank)”)中具有潜在的益处,其中一对桨或桨叶中的每一个可以被认为是如本文所述的人
肢可操作的驱动构件,以及从这种桨的把手延伸到水或另一种液体的运动链,其中桨叶可作为如本文所述的传动系移动。在其中可能使用本发明的方法和装置的又一类锻炼机器包括椭圆训练机、越野滑雪模拟器、楼梯登山机、踏步机、脚踏板和竖直登山模拟器,所有这些都包括人肢可操作的驱动构件。
39.因此,优选地,驱动构件选自包括踏板曲柄、上身锻炼曲柄、绞盘曲柄、起锚机曲柄、静态箱桨、划艇桨、踏步或爬楼梯踏板、椭圆训练器踏板和/或手柄、技能模拟器踏板和/或手柄、攀爬模拟器踏板和/或手柄、或脚踏板。换句话说,如上所述,本发明的方法关于一系列锻炼机器类型类型是适用的。
40.优选地,所述方法进一步包括基于所述用户效率得分,修改所述驱动构件的循环操作的步骤。
41.修改曲柄或其他驱动构件的循环操作等于将用户反馈纳入锻炼机器的使用中。不论使用者的健康水平如何,都认为这在改善运动表现方面非常效率。
42.如果锻炼机器包括可旋转地固定到每个所述驱动构件的各自的踏板或手柄,则是有利的,所述驱动构件被联接以驱动驱动轮的旋转,并且所述驱动构件相互对向180度。
43.更具体地,锻炼机器优选地是或包括静态锻炼机器,该静态锻炼机器优先于手柄而包括踏板。然而,如上所述,本发明的方法同样适用于一系列的手动锻炼机器。
44.在这样的实施例中,驱动轮可以包括一个或多个传感器,所述一个或多个传感器有助于在驱动构件的上止点与下止点位置处生成信号,以便允许在其循环运动期间监测驱动构件的旋转位置。
45.更具体地,驱动轮可以包括一个或多个传感器,所述一个或多个传感器有助于在驱动构件的上止点与下止点位置处生成信号,以便允许在其循环运动期间监测驱动构件的旋转位置。
46.所述锻炼机器可以是静态自行车。这种机器的踏板可选地可以被配备有脚趾夹和脚带,或者可以是无夹类型的,包括旨在用于力传递抓持鞋钉的踏板。
47.总体而言和天气条件不理想时,静态自行车对于室内自行车训练特别有用。室内骑自行车的受控环境使骑自行车的人能够隔离并专注于骑自行车健身和技术的特定领域,而骑自行车的人在道路上骑自行车可能无法做到这一点。而且,如今,业余和专业骑自行车的人经常发现将室内静态自行车的使用纳入其训练计划中是有益的,即使在天气好的时候。
48.在驱动构件被联接以用于循环运动以驱动传递或消散循环作用力的传动系的实施例中,所述传动系可以驱动风扇,所述风扇通过出口孔迫使空气进入腔室中,所述出口孔阻止空气的通过从而消散循环作用力。这是上面提到的10中使用的循环作用力消耗的主要手段。
49.优选地,所述出口孔的尺寸是可调节的,以允许调节所述出口孔阻止空气通过的程度,所述方法包括调节所述出口孔的尺寸的步骤。
50.在驱动构件被联接以用于循环运动以驱动传动系以传递或消散循环作用力的其他实施例中,所述传动系可以包括循环作用力的磁和/或电磁阻力器,所述方法包括使用所述磁和/或电磁阻力器切换或调节循环阻力的步骤。这是wattbike atom
tm 50中使用的循环作用力消散的主要手段。
51.优选地,在这样的实施例中,可以调节由这种阻力器提供的阻力的程度,例如通过使通过螺纹安装的磁体选择性地靠近或远离传动系的元件而移动。
52.在本发明的范围内,其他基于循环的锻炼机器可以使用其他机制来消散循环作用力。
53.在实施方案中,其中,所述驱动构件的驱动循环运动中的用户循环作用力的主要部分在所述驱动构件的运动的每个循环在左肢与右肢之间交替一次,并且步骤(i)包括基于运动循环期间的负载交替点,将所述运动循环期间测得的驱动力信号值分配给所述驱动构件中的一个或另一个,步骤(ii)包括得出针对每个驱动构件的最大用户效率系数信号和最小用户效率系数信号,以及步骤(iii)包括使用在步骤(ii)中的针对每个驱动构件的所述最大用户效率系数信号和所述最小用户效率系数信号,生成针对每个驱动构件得出的用户效率得分信号,然后基于针对每个驱动构件生成的所述用户效率得分信号值的平均值,生成总体用户效率得分信号。
54.分配用户效率的数字表示有助于锻炼机器的用户了解他/她的技术与对应于最佳效率的技术的接近程度。
55.优选地,在步骤(iii)中生成用户效率得分信号的步骤附加地涉及将预定的加权因子与在步骤(ii)中计算出的所述最大用户效率系数信号和所述最小用户效率系数信号一起使用,所述加权因子基于所述锻炼机器的施加到所述驱动构件的效率力与达到所述效率力所需的施加到所述驱动构件的总力之间的比率。
56.在步骤(iii)中生成用户效率得分信号的步骤还可以附加地涉及使用预定的调节因子,以使得每个驱动构件的所述用户效率得分落在70与80之间的最佳范围内。
57.所述最大用户效率系数可以被计算为:
[0058][0059]
其中,所述平均最大力是在预定循环段内针对该运动循环测得的所述驱动力信号值的平均值,其中所述最大力信号值是在所述段中测得的所述驱动力信号值的中间数据点。这种测量可以通过一个或多个传感器的操作以及多个力信号输出的生成而发生。
[0060]
在这样的实施例中,所述最小用户效率系数可以被计算为:
[0061][0062]
其中,所述平均最小力是在预定循环段内针对该运动循环测得的所述驱动力信号值的平均值,其中所述最小力信号值是在所述段中测得的所述驱动力值的中间数据点。通过一个或多个传感器的操作以及多个力信号输出的生成,可以再次进行这种测量。
[0063]
所述最大用户效率系数和所述最小用户效率系数反映所述最大力驱动曲线和最小驱动力曲线的形状。在自行车(无论是静态自行车还是常规自行车)的情况下,最佳驱动力曲线通过针对每个运动循环测得的最大驱动力值和最小驱动力值限定相对缓和的曲线。这样导致较高的最大用户效率系数值和最小用户效率系数值,从而导致较高的总体用户效率得分。
[0064]
在锻炼机器包括被联接以驱动驱动轮的旋转以使驱动构件相互对向180
°
角的驱动构件的实施例中,平均最大力和平均最小力优选地是基于45
°
段上测得的驱动力值来确定的。如所指示的,这些段分别以曲柄等循环中的最大力值和最小力值为中心。
[0065]
优选地,所述方法包括以下步骤:随着针对每个运动循环驱动力被分配至所述驱动构件而生成极视图
tm
,所述极视图
tm
展示施加至所述驱动构件的驱动力。
[0066]
监测驱动构件旋转的能力当使用锻炼机器时可以被显示为极视图
tm
图形式的力曲线。极视图
tm
曲线图展示在力施加期间经由驱动构件施加的可变驱动力以及驱动构件的位置。
[0067]
为了允许以总体用户效率得分的形式计算用户效率的准确表示,优选地以大约100hz的频率测量施加到驱动构件的驱动力。
[0068]
在锻炼机器包括具有驱动链的传动系的实施例中,步骤(i)可以包括测量链中的张力并且生成指示所述张力的一个或多个信号。
[0069]
在锻炼机器包括具有轴的传动系的实施例中,步骤(i)可以包括测量所述轴中的扭矩值并且生成指示所述扭矩值的一个或多个信号。
[0070]
所述方法可以包括:在监测时段内生成代表所述用户效率得分的多个标记,所述方法可选地包括以下步骤:在所述监测时段期间分析所述效率得分信号并且检测所述效率得分信号值的变化。
[0071]
此外,所述方法可以包括以下步骤:记录、传输、下载、上载、存储、打印或显示指示所述锻炼机器的使用的数据。
[0072]
所述方法可以包括显示、打印、存储、下载或传输用户训练计划(user training programme)。
[0073]
优选地,可以基于针对所述驱动构件的一个或多个运动循环的所述用户效率得分,修改所述用户训练计划。
[0074]
用户训练计划可以为用户提供指导。基于所述用户效率得分调整训练计划创建个性化的训练方案,并且为用户带来更有成效的锻炼。
[0075]
可以使用一个或多个可编程设备生成用户效率得分。可以附加地或可替代地使用不需要编程的其他类型的计算设备。示例包括但不限于运算放大器电路。
[0076]
优选地,所述一个或多个可编程设备或其他计算设备包括显示器,并且被可操作地连接至所述锻炼机器。附加地或可替代地,一个或多个可编程设备或其他计算设备可能够产生不同的感官输出,例如但不限于可听输出。
[0077]
能够看到或例如听到指示由可编程设备或其他计算设备产生的用户效率得分的输出的用户将受益于立即获得有关他/她投入的循环性作用力以及他/她在特定时刻转动曲柄的方式是否有效的实时反馈。
[0078]
有利地,所述方法包括以下步骤:生成指示通过驱动构件的操作而生成的功率的一个或多个用户功率值信号;以及记录、显示、打印、存储、下载、上传或传输一个或多个用户功率值。
[0079]
这样的“功率训练”提供了一个定量数字,可以准确地告诉用户他/她在锻炼过程中会生成多少功率。这是有价值的信息,可以独立于疲劳、水合作用和温度等外部因素进行测量。生成的功率的指示允许运动员对在指定训练区(诸如竞技自行车手熟悉的那些训练
区)内的训练充满信心。
[0080]
优选地,锻炼机器包括心率数据信号的至少一个接收器,所述方法包括以下步骤:在产生一个或多个用户心率值时使用胸带、腕带、脚踝带或指夹中的一个或多个传输心率传感器。
[0081]
还有利的是,所述方法包括以下步骤:生成指示用户心率值的一个或多个信号,以及记录、显示、打印、存储、下载、上传或传输从此类信号生成的一个或多个用户心率值。这样的值可以与如上所述的用户力量数据同时显示。申请人已经发现这提供了特别效率的训练技术。
[0082]
心率是确定锻炼的理想强度范围的有用指标,因为心率表明身体对努力的反应。此外,对心率数据的监测可以提供脱水和疲劳影响的实时指示;而且,在寻求改善从疾病、手术或其他形式的医学治疗中康复的人的身体状况时,这将是非常有用的。锻炼心率数据还可以用于监测个人对某些类型药物的反应。当在某些工作(例如,军事、执法、消防和民防组织的工作)的选拔过程中可能需要评估个人健康水平时,这也很有用。
[0083]
优选地,使用可以经由基于云的计算下载或访问的应用来生成用户效率得分。
[0084]
众所周知,基于云的计算允许通过互联网以良好的灵活性和可访问性访问应用程序,分析软件和用户数据,而不会消耗诸如用于实现本发明的方法的步骤的可编程设备的显著百分比的存储容量。
[0085]
根据本发明的另一方面,提供一种锻炼机器,其包括:经联接用于循环运动的一对人肢可操作的驱动构件,以及电子设备,所述电子设备具有至少一个感官指示器、可操作地连接至所述锻炼机器,所述锻炼机器和电子设备通过实施根据本发明的如本文所述的方法来生成所述用户效率得分并且经由所述感官指示器输出所述用户效率得分。
[0086]
优选地,所述感官指示器是可视显示器,并且输出所述用户效率得分的步骤可以包括使用所述显示器显示所述用户效率得分。另外地或可替代地,所述感官指示器可以是或可以包括听觉指示器,并且输出所述用户效率得分的步骤可以包括使用所述听觉指示器生成所述用户效率得分的听觉指示。
[0087]
优选地,所述电子设备从包括膝上型计算机或台式计算机、所谓的“平板电脑”、智能电话或个人数字助理(pda)的列表中选择。附加地或可替代地,所述电子设备可以是或可以包括被可操作地连接至所述锻炼机器的专用监测设备。
[0088]
有利地,所述锻炼机器被配置为静态锻炼自行车,所述静态锻炼自行车包括被可旋转地固定至每个驱动构件的相应踏板。然而,所述锻炼机器可以被配置为一系列其他类型中的任何一种,包括但不限于本文列出的那些。
[0089]
现在将通过非限制性实例的方式,参考附图来描述本发明的优选实施例,在附图中:
[0090]
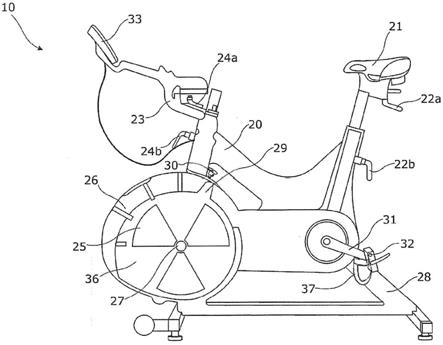
图1示出了形式的锻炼机器的第一实施例;
[0091]
图2示出了样本极视图
tm
;
[0092]
图3是根据本发明实施例的可编程设备的显示器的前视图,该可编程设备的显示器显示用户效率得分,并且被连接到计算机。
[0093]
图4示出了wattbike atom
tm
形式的锻炼机器的第二实施例;以及
[0094]
图5以示意性形式示出了非可编程设备的一个实施例,该非可编程设备可以用于
在本发明的方法中从传感器的输出得出信号。
[0095]
除非上下文另外指示,否则本发明的给定方面、特征或参数的偏好和选项应该被视为已经与本发明的所有其它方面、特征和参数的任何和所有偏好和选项结合而公开。
[0096]
如本文所使用的,“信号”主要涉及电信号,并且对这种信号的值或大小的引用是对诸如电压的参数的引用,这些参数根据生成信号的传感器的输出而变化。但是,可以使用电信号以外的信号来执行本文所述的方法。至少光、磁和音频信号在某些实施例中可以替代地被采用。
[0097]
现在将参考在以静态锻炼机器10形式的锻炼机器的操作期间监测用户效率的方法来描述本发明的实施例。替代地,静态锻炼机器可以是另一种类型的静态自行车,诸如图4中所示的wattbike atom
tm 50、游艇绞盘或起锚机训练器、楼梯爬升器或踏步机、椭圆训练机、越野滑雪模拟器、攀爬模拟器、上身锻炼机器或静态箱。
[0098]
此外,如本文所述,本发明的方法可用于各种移动设备中,诸如公路自行车或越野自行车、划艇和帆船的特征件(例如,起锚器)。因此,以下关于静态自行车的特定形式的描述仅作为示例给出,并且不限制本发明的范围。
[0099]
10如图1所示。10具有带有座椅21的自行车状框架20,该座椅的位置可以使用座椅调节杆22a、22b进行调节;把手23和该把手的位置可以使用把手调节杆24a、24b进行调节。10具有前轮防护装置26,该前轮防护装置容纳飞轮,该飞轮在图1中不可见,但是被布置为可绕水平轴线旋转,该水平轴线与基本上圆形的壳体26的中心27重合。10包括支撑架28,自行车的后轮通常位于该支撑架处。支撑架28包括地板接合限制部28a、28b,这些地板接合限制部分别延伸到wattbike 10的纵向中心平面的任一侧,以使机器稳定以防止侧向倾斜。
[0100]
如在优选实施例中可见的,每个肢28a、28b包括可选的向下延伸的地板接合脚。支撑架28包括刚性的向前延伸的框架构件30,该框架构件在其最前端处位于下方并且被固定至轮防护装置26。另外的地板接合肢30a、30b从构件30侧向延伸,并且还可以包括可选的接合地板脚。支撑框架元件被牢固地固定在一起,并且为机器10的操作部提供高度稳定的支撑。
[0101]
在框架20的下段处,10包括踏板曲柄31形式的一对驱动构件。在其他静态锻炼机器的情况下,驱动构件可以包括例如上身锻炼曲柄、绞盘曲柄、起锚机曲柄、静态箱桨或划艇桨。
[0102]
每个踏板曲柄31具有被可旋转地固定在一端处的踏板32。对于上身锻炼机器,手柄被连接到上身锻炼曲柄而不是踏板。
[0103]
图1中所示的踏板32被配备有脚趾夹和带组合37,可帮助10的使用者在踏板曲柄31的整个循环运动中消耗能量。踏板32的与支撑脚趾夹和带组合37的踏板的相反侧形成为所谓的“无夹”踏板,该踏板可以容纳附接到使用者的骑行鞋的鞋钉。
[0104]
脚趾夹、带和无夹踏板的原理和性质在自行车领域中是众所周知的,因此在此不需要详细描述。
[0105]
如本领域技术人员将想到的,在所示出的支撑框架、曲柄踏板设计上的变型在本发明的范围内是可能的。
[0106]
踏板曲柄31通过齿轮联接,以相互对向180
°
的角度,使得当一个踏板曲柄31位于
上止点位置时,另一个踏板曲柄31位于下止点位置,反之亦然。
[0107]
齿轮通过环形驱动链联接至位于前轮防护装置26中的飞轮,该环形驱动链围绕齿轮并且围绕安装在飞轮上的带齿链轮延伸。齿轮、环形驱动链和带齿链轮限定传动系,该传动系将循环作用力从踏板曲柄31传递到飞轮,踏板曲柄31的循环运动驱动齿轮的旋转,继而通过环形驱动链和带齿链轮驱动飞轮的旋转。
[0108]
一系列规则间隔的径向风扇叶片被固定至飞轮,以及轮防护装置26的侧面(在图1中可见)包括一系列三个扇形格栅25,通过这些格栅将空气吸入到由轮防护装置26包围的体积内。这种空气运动与飞轮的惯性一起,为飞轮的旋转提供阻力,并且模拟在户外骑传统自行车时遇到的阻力。轮防护装置26包括一个或多个出口孔,由于飞轮的运动,通过所述一个或多个出口孔将在轮防护装置26内部吸入的空气排出。
[0109]
前轮防护装置26具有空气制动器齿轮杆29,该空气制动器齿轮杆允许调节飞轮的阻力水平。空气制动器齿轮杆29的运动引起与其相连的一系列扇形百叶窗36的旋转,从而选择性地且逐渐地覆盖或露出格栅25,从而调节进入飞轮的空气流。与格栅25被更大程度地覆盖时相比,露出格栅25增加空气的流动、增加阻力且因此模拟以更高的档位骑传统自行车。
[0110]
另外,磁性攀爬杆30被固定到前轮防护装置26。磁性攀爬杆30调节阻力磁体,该阻力磁体用于抵抗并由此减慢飞轮的旋转,该飞轮由例如一种或多种铁磁材料制成或包括一种或多种铁磁材料。磁体被固定至附接到攀爬杆30的一个或多个螺纹,并且可利用磁性攀爬杆30朝着飞轮和远离飞轮移动,以便调节由磁体产生的阻力。磁性攀爬杆30旋转并且标有不同的阻力级别,从而允许用户在骑自行车时重现在平坦地面上或爬坡的感觉。
[0111]
参照图4,可以看出wattbike atom
tm 50还包括带有座椅21的自行车状框架20,该座椅的位置可以通过调节机构22a、22b进行调节,并且把手23和该把手的位置可以通过调节机构24a、24b进行调节。wattbike atom
tm 50包括前轮防护装置26,该前轮防护装置容纳一对不可见但是被布置成可绕水平轴线旋转的飞轮盘。wattbike atom
tm 50包括支撑架28,自行车的后轮通常位于该支撑架处。图4的支撑架28与图1的支撑架28具有不同的设计,在功能上类似于图1的支撑架。鉴于此,未详细描述图4的支撑架28,其结构和功能从图4的视觉检查中显而易见
[0112]
在框架20的下段处,wattbike atom
tm 50包括踏板曲柄31形式的一对驱动构件,踏板32被可旋转地联接至踏板曲柄31的端部。
[0113]
踏板32的构造以及将踏板曲柄31联接至飞轮以便在踏板曲柄31的循环运动中驱动飞轮旋转的传动系的构造与在10中采用的构造相同,因此将不再次详细描述。
[0114]
与使用格栅和百叶窗相反,wattbike atom
tm 50包括一个或多个永久磁体形式的阻力机构,其被安装在前轮防护装置26中,以便抵抗飞轮的旋转,飞轮中的至少一个由一种或多种例如铁磁材料制成或者包括一种或多种例如铁磁材料。磁体被安装在螺纹接合在框架中的螺钉上,并且设置电动机以驱动螺钉的旋转。根据驱动的方向,这种驱动选择性地将磁体移入或移出一对飞轮之间的间隙,从而使磁体移向和移离飞轮的磁性轮缘,以便增加或减小磁体提供的阻力。
[0115]
在其他实施例中,设想可以使用一个或多个电磁体代替一个或多个永磁体。
[0116]
10和wattbike atom
tm 50包括测量单元,用于测量踏板曲柄31循环运动期间施加到踏板曲柄的驱动力,该测量单元通过测量环形驱动链中的张力来测量驱动力。测量单元包括施加到环形驱动链的臂,该臂在链的侧面上被轻微按压,并且测量单元还包括测量传感器,以测量由链施加到臂的恢复力,该恢复力倾向于抵抗手臂的按压。优选地,测量单元以100hz的采样率测量由链施加至臂的恢复力。
[0117]
测量单元被联接至传感器,该传感器在所示的实施例中采用磁场传感器的形式,该磁场传感器相对于齿轮定位于框架上的固定位置。磁体形式的一对传感器件(sensor piece)被附接至齿轮,这些传感器件位于齿轮上,以便在齿轮旋转时通过传感器,该传感器在检测通过的传感器件时生成信号。这使得测量单元能够计算齿轮的旋转速度。
[0118]
在顺序实施例中,一对传感器可以相对于齿轮位于固定位置,并且至少一个传感器件可以附接到齿轮。在另外的实施例中,(一个或多个)传感器和(一个或多个)传感器件的位置可以颠倒,(一个或多个)传感器被安装在齿轮上,并且(一个或多个)传感器件被安装在框架上。
[0119]
传感器件位于齿轮上,以使得传感器以180
°
的间隔生成信号。更具体地,通过传感器件在齿轮上的适当定位,当在一个踏板曲柄31位于上止点位置而另一个踏板曲柄31位于下止点时,传感器生成第一信号,以及当一个踏板曲柄31位于下止点中心位置而另一个踏板曲柄31位于上中心位置时,传感器生成第二信号。每次测量施加到踏板曲柄31的驱动力时,这使得测量单元基于计算出的齿轮的旋转速度可靠地确定踏板曲柄31的时间位置。
[0120]
由于踏板曲柄31的长度是固定的,因此测量单元能够容易地直接从所测量的驱动力值计算用户经由踏板32和踏板曲柄31施加的扭矩。
[0121]
由于循环驱动链上的力来自用户输入,并且所有阻力都施加至10或wattbike atom
tm 50的一根和同一根轴,因此测量单元能够测量用户的力量输出,其受(一个或多个)飞轮的旋转阻力的影响。
[0122]
图1中所示的10通过安装在框架20的前部、靠近把手23的可编程或非可编程设备33进行控制。设备33通过有线连接或无线通信协议被可操作地连接到的测量单元。
[0123]
图3示出被连接到台式计算机34的设备33的前视图。可编程设备33还可以被可操作地连接到膝上型计算机、平板电脑、智能电话或个人数字助理(pda),或者在一些实施例中,它可以在不涉及连接到另一设备的独立模式下使用。当设备33如此连接时,该连接可以经由一根或多根电线实现或使用诸如但不限于蓝牙的近场通信协议无线地实现。数据可以在存在时被传输到台式计算机34以用于显示、打印、存储、记录、下载和上传到例如云。
[0124]
附加地,可以经由可编程设备33、诸如台式计算机34的连接计算机和/或另一设备来显示、打印、存储、下载或传输用户训练计划。
[0125]
图4中所示的wattbike atom
tm 50通过平板或智能电话形式的可编程设备(未示出)进行控制,该可编程设备可以被固定在框架20前部处、把手23上方的安装元件52a、52b之间。安装元件52a、52b中的至少一个可以在形成框架20的一部分的元件上朝向彼此或远离彼此滑动,以便允许将平板电脑或智能手机夹持在安装元件52a、52b之间。可编程设备通过无线通信协议被可操作地联接至wattbike atom
tm 50的测量单元。
[0126]
在wattbike atom
tm 50的情况下,数据也可以传输到台式计算机,以进行显示、打
印、存储、记录、下载和上传到例如云。类似地,可以经由可编程设备显示、打印、存储、下载或传输用户训练计划。
[0127]
10和wattbike atom
tm 50的可编程设备都被配置为接收与驱动力测量以及踏板曲柄31的相关时间位置有关的数据。
[0128]
使用者的腿在踏板曲柄31上的双重动作,向左按压并向右恢复,或者向右按压并向左恢复,产生施加到驱动(一个或多个)飞轮的旋转的循环驱动链的聚集驱动力。设备33或与其连接的另一设备被配置为取决于哪条腿提供驱动力的主要部分,将聚集驱动力分配至左踏板曲柄或右踏板曲柄31,当踏板曲柄31位于其上止点和下止点位置时,由传感器产生的信号表示左踏板曲柄与右踏板曲柄31之间的负载交替。
[0129]
设备33或另一设备33被配置为使用接收到的数据计算左踏板曲柄和右踏板曲柄31中的每个的最大用户系数信号和最小用户系数信号。
[0130]
左踏板曲柄和右踏板曲柄31中的每个的最大用户系数根据以下公式进行计算:
[0131][0132]
其中,平均最大力是在45
°
循环段内针对该运动循环由力传感器生成的驱动力信号值的平均值,其中生成的最大力值信号是在该段中测得的驱动力值的中间数据点。
[0133]
左踏板曲柄和右踏板曲柄31中的每个的最小用户系数根据以下公式进行计算:
[0134][0135]
其中,平均最小力是在45
°
循环段内针对该运动循环由力传感器生成的驱动力信号值的平均值,其中最小力值信号是在该段中测得的驱动力值的中间数据点。
[0136]
显然,通过分别一方面比较最大和“平均最大”力信号值以及另一方面比较最小和“平均最小”力信号来生成最大用户系数信号和最小用户系数信号,在每种情况下均使用简单的除法表达式总结。
[0137]
可以使用如上所述的一个或多个可编程设备来进行这种比较;但是这不是必须的。相反,众所周知,可以使用诸如运算放大器和乘法器反馈组合的永久接线电路执行简单的除法型信号幅度比较。在图5所示的这种布置中,平均最大或最小(适当时)信号电压可以输入到运算放大器51的反相输入端,该运算放大器的非反相输入端接地。
[0138]
运算放大器输出作为一个输入被反馈到乘法器52,该乘法器52的另一个输入是最大或最小(适当时)力信号电压。乘法器52的输出被馈送到运算放大器51的反相输入。净输出是最大或最小用户系数,乘以运算放大器增益k。此信号可用于方法的下一阶段,如下所述。
[0139]
可编程设备或非可编程设备33根据以下等式使用最大用户系数和最小用户系数来计算左踏板曲柄和右踏板曲柄31中的每个的用户效率得分:
[0140]
左得分=(宽x(左系数
最小
x左系数
最大
)
‑
m)x 100
[0141]
右得分=(宽x(右系数
最小
x右系数
最大
)
‑
m)x 100
[0142]
其中:
[0143]
·
w是加权因子,其基于施加到踏板曲柄31的效率力与获得该效率力所需的施加到踏板曲柄31的总力之比;并且
[0144]
·
m是定义70至80范围内的最佳用户效率得分的调节因子。
[0145]
诸如所指示的那些的简单乘法可以由乘法器来执行,该乘法器是工程学中熟悉的替代使用可编程设备的方法。
[0146]
将理解的是,w和m的值将根据锻炼机器的性质而变化。在10和wattbike atom
tm 50的情况下,w的值可能会落在0.8到1.8的范围内,而m的值可能会落在
‑
0.5到
‑
0.05的范围内。
[0147]
然后,可编程设备使用左踏板曲柄和右踏板曲柄31中的每一个的用户效率得分,根据以下公式计算总体用户效率得分:
[0148][0149]
这样的推导可以通过使用可编程设备或例如运算放大器加法器和分压器的组合来处理左得分信号和右得分信号来进行。
[0150]
可编程设备或非可编程设备具有显示器,并且被配置为显示用户效率得分。
[0151]
可编程设备或非可编程设备还可以被配置为显示与用户对10或wattbike atom
tm 50的操作有关的其他测量特性。
[0152]
图3所示的10的可编程设备33被配置为显示用户效率得分38,以及与脚踏圈速39、用户输出的准确力量40、心率41、右腿42和左腿43力量输出百分比和10的使用期限45。可编程设备33还被配置为以极视图
tm
曲线图44的形式在屏幕上显示相对于踏板曲柄31的时间位置的测量的驱动力,诸如图2中所示的和上述的极视图
tm
。
[0153]
或多或少的信息可以被显示在可编程设备33上。信息也可以以不同于图3中所示的布置的布置进行显示。信息可以被记录、传输、下载、上传、存储和打印。
[0154]
当用户开始骑乘10或wattbike atom
tm 50时,他/她向踏板32施加驱动力,因此踏板曲柄31在左右两侧上交替地将踏板向下推和向上拉。当每个踏板曲柄31完成360
°
的旋转时,指示踏板曲柄31的生成的力和时间位置的极视图
tm
(极视图
tm
的示例在图2中示出并且在上面进行描述)被显示在可编程设备33上。在所示的优选实施例中,监测并测量施加到踏板曲柄31的驱动力,并且每秒生成约100次指示该驱动力的信号,尽管在本发明的范围内其他采样率也是可能的。
[0155]
如所解释的,可编程设备或非可编程设备得出每个驱动器构件的最大用户效率系数信号和最小用户效率系数信号,且然后得出每个驱动构件的用户效率得分,之后使用每个驱动器构件的用户效率得分,以便根据上述方程式得出总体用户效率得分。
[0156]
如果10或wattbike atom
tm 50的用户循环操作处于或接近最佳效率,则计算在70
‑
80范围内的效率得分。
[0157]
在特定的监测时段内,生成一个以上的用户效率得分值。分析这些值,并且用户可以根据他/她已经输出的效率得分来修改他/她的训练计划。
[0158]
可编程设备能够计算在踏板曲柄31中生成的力量并且显示这种力量值。
[0159]
用户可以穿戴胸带、腕带、脚踝带或手指夹传输心率传感器。这些设备生成用户心率值,可以使用各种类型的近场通信将用户心率值发送到可编程设备。图3中所示的可编程设备33包括显示段41,该显示段显示瞬时一般心率值。
[0160]
用户效率得分、心律节奏、时间和力量值以及极视图
tm
数据可以均被记录、显示、打印、存储、下载、上传或传输到电子设备,诸如计算机、平板电脑或智能手机。
[0161]
本发明允许具有经联接用于循环运动的一对人肢可操作的驱动构件的锻炼机器器的使用者监测、评估和比较他/她的循环技术的效率。本发明提供精确的图形,该图形允许用户通过显示效率得分来确定用户的技术与最佳效率之间的偏差。该效率得分可以实时显示给用户,从而提供连续的反馈并且由此有助于用户的训练。特别是在骑自行车中,本发明使骑自行车的人能够改善他/她的蹬踏技术,进而改善训练和比赛的适应性、力量、耐力和恢复力方面。
[0162]
本说明书中对装置的在前公开装置的列举或讨论不应必然地被视为是承认所述装置是现有技术的一部分或是公知常识。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1