机械通气期间血液动力学参数的非侵入性估计的制作方法
[0001]
本发明涉及用于在对象的机械通气期间血液动力学参数的非侵入性估计的方法、计算机程序和通气系统。
背景技术:
[0002]
在机械通气期间,需要监测通气患者的生理状态。心电图(ecg)测量系统、血压传感器和脉冲血氧仪是公知的医疗设备的示例,并且用于监测机械通气患者的心血管功能。
[0003]
与通气患者的肺和/或全身循环有关的血液动力学参数的监测对于患者的心血管功能的评估可能是重要的。例如,可能期望监测选自由以下组成的组中的一个或更多个血液动力学参数:全身血压(sbp)、肺血压(pbp)、全身心输出量(sco)、肺心输出量(pco)和心内分流。
[0004]
大多数已知的用于确定这些和其他血液动力学参数的方法不适合在机械通气期间使用,这是因为它们的侵入性和复杂性,它们不能被连续执行,以及/或者它们需要通常在机械通气患者的床边不可用的附加设施。
[0005]
用于sbp确定的非侵入性技术的示例是由nihon koden开发并且在https://eu.nihonkohden.com/en/innovativetechnologies/escco(2019-04-17)上描述的escco技术。escco的原理基于冲程量(sv)与全身脉冲传输时间(ptt)(有时也被称为脉冲波传输时间(pwtt))之间的逆相关。根据该原理,可以根据以下公式计算患者的组合心输出量(即心脏的左侧和右侧的输出量之和)的估计(“escco”):
[0006]
escco=k
×
(α
×
ptt+β)
×
hr,
[0007]
其中,α是常数,k和β是需要针对每个患者进行个体化的常数,并且可以基于患者特征例如患者长度、体重、性别等进行估计,以及hr是患者的心律。
[0008]
通过根据测量的心电图(ecg)和外围毛细血管氧饱和度(spo2)信号——例如随着从ecg r波峰至spo2脉冲波的上升点测量的时间——确定全身ptt,escco技术允许仅使用ecg传感器和spo2传感器来非侵入性地确定sco。
[0009]
全身ptt也可以用于sbp的非侵入性且无袖带确定,如例如在wang等人,“cuff-free blood pressure estimation using pulse transit time and heart rate”,2014 12
th international conference on signal processing(icsp),pp.115-118,2014中所描述的。这种用于血压确定的非侵入性且无袖带技术允许根据以下公式计算患者的全身血压:
[0010][0011]
其中,α是常数,r是血管的内半径,ρ是血液密度,l是血管长度,h是血管壁厚度,以及e0是血管壁的零压力弹性模量。因此,ecg测量和spo2测量可以用于全身心输出量和全身血压的非侵入性确定。
[0012]
上述技术的缺点在于它们不能容易地用于pco和pbp的确定,原因是不能容易地非侵入性地确定沿患者的肺动脉传播的血压脉冲的ptt。为了确定ptt,必须能够确定血压脉冲到达测量点的时间点,这是沿患者的肺动脉的重要任务。
[0013]
上述技术的另一缺点在于它们需要使用ecg传感器来检测用于确定ptt的产生血压脉冲的心跳的时间点。尽管在机械通气期间进行ecg监测很普遍,但是期望能够在不需要ecg传感器或其他外围设施的情况下确定血液动力学参数例如sbp、sco、pbp和pco。
[0014]
用于pbp确定的非侵入性技术的示例是由micah r fisher等人,"accuracy of doppler echocardiography in the hemodynamic assessment of pulmonary hypertension",american journal of respiratory and critical care medicine,vol.179,no.7(2009),pp.615-621公开的基于超声的技术。根据该技术,超声用于对流向患者的肺部的血流量与朝向患者的心脏回漏的血流量进行比较。该比较可以用于估计患者的肺血流量。该技术需要超声换能器形式的附加设施,并且依赖合格人员来执行测量。
[0015]
用于pbp确定的另一非侵入性技术采用多普勒超声心动图来确定血压脉冲在沿肺动脉的两个位置之间传播所需的时间(脉冲传输时间,ptt)。该技术需要多普勒超声心动图设施以及具有至少两个测量点的相当复杂的设置。
[0016]
在proenca m等人“non-invasive monitoring of pulmonary artery pressure at the bedside”,conf proc ieee eng med biol soc.2016 aug;2016:4236-4239,doi:10.1109/embc.2016.7591662中公开了用于pbp确定的非侵入性技术的又一示例。为了连续地监测患者的肺血压,该技术采用了作为另一医学成像技术的电阻抗断层摄影(eit)。
[0017]
还已经提出了基于磁共振(mr)成像技术的非侵入性技术,以用于评估肺动脉僵硬度或pbp估计。例如,weir-mccall jr等人“assessment of proximal pulmonary arterial stiffness using magnetic resonance imaging:effects of technique,age and exercise”,bmj open respir res.2016 oct 7;3(1):e000149.ecollection 2016.公开了用于确定肺脉冲波速度(pwv)的基于mr的技术。
[0018]
在us 2016/0066801中描述了用于pbp确定的非侵入性方法的又一示例。该方法是采用强制振荡技术(fot)的声学方法,如例如在e.oostveen等人“the forced oscillation technique in clinical practice:methodology,recommendations and future developments”,european respiratory journal,2003;22:1026-1041中进一步描述的。
[0019]
在us 2016/0066801中公开的方法涉及使用心音图仪或ecg设施来确定指示患者的心跳时间的脉冲开始时间t1,以及使用fot设施来确定患者的肺部的肺泡处的脉冲到达时间t2。然后可以根据t1和t2确定脉冲的肺ptt,并且用于例如基于脉冲波速度(pwv)与血压之间的已知关系例如moens-korteweg关系计算患者的pbp。用于确定患者的肺部的肺泡处的脉冲到达时间的fot涉及借助于扬声器产生压力振荡,并且以高于患者的自然呼吸频率的频率将这种压力振荡施加至患者的气道中。fot还涉及分别借助于呼吸速度描记器和压力换能器记录患者的气道开口附近的流量和压力信号。称为阻抗(zrs)的施加的压力与所产生的流量之间的复杂关系由气道、肺部组织和胸壁的机械特性确定,并且取决于施加的压力振荡的频率。通过研究zrs的频率相关行为,特别是通过识别肺血液脉冲波到达时zrs的变化,可以确定脉冲到达时间t2。
[0020]
尽管能够确定沿患者的肺动脉的肺ptt,并且因此能够非侵入性地确定pbp,但是
us 2016/0066801中公开的方法具有以下缺点:需要使用fot设施来确定血压脉冲到达患者的肺部的时间,以及使用心音图仪或ecg设施来确定患者的心跳的时间点。
[0021]
由于与现有技术相关联的上述缺点,因此需要一种非侵入性技术来估计诸如sbp、sco、pbp和pco的血液动力学参数,该技术需要极少的外围设施并且易于在机械通气患者的床边可用。
技术实现要素:
[0022]
本公开内容的目的是提出用于非侵入性地估计机械通气患者的血液动力学参数的技术,该技术解决或至少减轻与现有技术相关联的上面提到的问题中的一个或更多个。
[0023]
本公开内容的另一目的是提出用于非侵入性地估计机械通气患者的血液动力学参数的技术,该技术易于在机械通气患者的床边处可用。
[0024]
本公开内容的特定目的是提出用于非侵入性地估计机械通气患者的血液动力学参数的技术,该技术可以在不需要在机械通气患者的床边处通常不可用的附加设施或医疗设备的情况下使用。
[0025]
此外,本公开内容的目的是提出用于非侵入性地估计机械通气患者的血液动力学参数的技术,该技术允许连续地监测血液动力学参数。
[0026]
特别地,本公开内容旨在提出用于自动和非侵入性地确定与机械通气患者的肺或循环相关的血液动力学参数的改进的或至少替选的技术。
[0027]
这些目的和其他目的根据本公开内容通过由所附权利要求限定的方法、计算机程序和通气系统来实现。
[0028]
根据本公开内容的一方面,提供了一种用于非侵入性地确定机械通气对象的血液动力学参数的方法,该确定基于对象的心跳的时间点(t
hb
)和由心跳引起的血压脉冲到达对象的肺部处的到达时间点(t
arr_pulm
)。该方法包括以下步骤:测量呼吸压力和/或呼吸流量;以及根据由血压脉冲到达肺部导致的对象的肺容积的变化而引起的所测量的呼吸压力和/或呼吸流量的变化来确定到达时间点。
[0029]
血液动力学参数可以是例如肺心输出量(pco)或肺血压(pbp)中的任何一个。t
hb
和t
arr_pulm
可以用于计算血压脉冲沿着患者的动脉的肺脉冲传输时间(ptt)。然后可以基于用于上面提到的全身心输出量和全身血压的关系中的任何一种根据肺或ptt来估计pco或pbp。
[0030]
与多普勒超声心动图方法相比,本公开内容因此建议根据呼吸压力和/或呼吸流量的变化确定t
arr_pulm
。这是有利的,因为可以根据由提供患者的机械通气的呼吸装置的常规压力和/或流量传感器获得的呼吸压力和/或流量测量值来确定t
arr_pulm
。
[0031]
与fot方法相反,其中高频压力振荡被叠加至呼吸压力上,以便根据由血压脉冲到达对象的肺部时气道的几何形状的变化引起的气道阻抗的变化来确定t
arr_pulm
,本公开内容建议根据呼吸压力和/或呼吸流量的变化来确定t
arr_pulm
,该变化是由血压脉冲到达对象的肺部引起的通气对象的肺容积的自然发生变化的结果。呼吸压力和/或呼吸流量的这种变化或波动通常称为心源性振荡。心源性振荡的现象在机械通气领域是公知的,并且通常被认为是不期望的伪事实,该伪事实使呼吸压力和流量读数扭曲,并且将噪声添加至通常呈现给执行机械通气的呼吸装置的操作者的压力和流量曲线。通过根据呼吸压力曲线和/或
呼吸流量曲线中的肺流量诱发的心源性振荡确定t
arr_pulm
,所提出的方法使得除了常规呼吸装置中已经存在的压力和/或流量传感器之外不需要硬件设施即可确定t
arr_pulm
。因此,例如虽然fot是需要对正在进行的机械通气进行操纵(通过将高频压力振荡施加至呼吸压力上)的意义上的主动技术,但是本公开内容的基于心源性振荡的技术是不需要调整患者正在进行的机械通气的被动技术。
[0032]
因此,根据心源性振荡确定t
arr_pulm
的效果是,除了通常包括在呼吸装置中的设备之外不需要其他设施以执行所提出的方法。另一效果是该方法可以在不修改对象正在进行的通气治疗(例如施加至通气对象的气道压力或流量方面)的情况下执行。又一效果是,该方法可以连续地执行,例如对于每个呼吸周期执行一次,因此允许在机械通气期间连续地监测血液动力学参数例如pco和pbp。
[0033]
可以直接根据所测量的呼吸压力和/或所测量的呼吸流量的变化来确定血压脉冲的到达时间t
arr_pulm
。直接根据所测量的呼吸压力和/或所测量的呼吸流量的变化确定t
arr_pulm
,这意味着在确定t
arr_pulm
时不使用其他物理量,并且无需计算和分析压力与流量之间的特定关系即可确定t
arr_pulm
。例如,虽然基于fot的方法需要分析zrs即所施加的压力振荡与所产生的流量之间的复杂关系的频率相关行为,但是所提出的基于心源性振荡的方法允许根据所测量的呼吸和所测量的呼吸流量中一者或两者中的变化直接确定t
arr_pulm
。这具有实现对血流动力学参数的快速、精确和计算友好的监测的效果。
[0034]
可以根据所测量的呼吸压力和/或所测量的呼吸流量的大小变化来确定到达时间t
arr_pulm
。例如,t
arr_pulm
可以被确定为所测量的呼吸压力和/或所测量的呼吸流量达到阈值时的时间点。
[0035]
替选地,可以通过分析呼吸压力曲线和/或呼吸流量曲线的曲率来确定t
arr_pulm
,所述呼吸压力曲线和/或呼吸流量曲线分别表示所测量的呼吸压力和所测量的呼吸流量随时间的变化。例如,可以基于呼吸压力曲线和/或呼吸流量曲线的相对于时间的一阶和/或二阶导数的变化来确定t
arr_pulm
。这是有利的,因为与在血压脉冲到达患者的肺部处时的呼吸压力曲线和呼吸流曲线的幅度相比,呼吸压力曲线和/或呼吸流量曲线的一阶和/或二阶导数可能受到更大程度的影响。因此,研究一阶和/或二阶导数的变化可以提供对t
arr_pulm
的更加精确和/或鲁棒的估计。
[0036]
该方法还可以包括以下步骤:基于指示血压脉冲到达对象的肺部的近似时间点的至少一个参数来估计血压脉冲到达对象的肺部的时间窗口;以及基于在所估计的时间窗口期间测量的呼吸压力和/或呼吸流量来确定t
arr_pulm
。这可以防止所测量的不是由血压脉冲到达对象的肺部引起的呼吸压力和/或呼吸流量的波动被误认为是由肺流量诱发的心源性振荡,并且因此使得该方法更鲁棒。
[0037]
可以根据指示血压脉冲到达对象的肺部的近似时间点的任何参数来估计血压脉冲到达对象的肺部的时间窗口,包括但不限于
[0038]-心跳的时间点;
[0039]-一个或更多个先前心跳的时间点;
[0040]-由一个或更多个先前心跳生成的一个或更多个先前血压脉冲在对象的肺部处的到达时间点。
[0041]
可以根据所测量的呼吸压力和/或所测量的呼吸的变化来确定心跳的时间点t
hb
,
即根据在所测量的呼吸压力和所测量的呼吸流量中的一者或两者中的心跳诱发的心源性振荡来确定心跳的时间点t
hb
,所测量的呼吸压力和/或所测量的呼吸由在心跳期间心脏对对象的肺部的物理冲击而产生。
[0042]
根据所测量的呼吸压力和/或呼吸流量确定t
arr_pulm
和t
hb
两者的优点在于除了呼吸压力和/或呼吸流量之外没有其他量,并且因此除了通常在通气系统中存在压力和/或流量传感器之外不需要用于确定血液动力学参数的其他传感器。例如,与us 2016/0066801中描述的fot方法相比,不需要心音图仪或ecg设施来确定心跳的时间点。
[0043]
根据呼吸压力和/或呼吸流量确定t
arr_pulm
和t
hb
两者的优点还在于,心跳的时间点与根据所测量的呼吸压力和/或流量检测到的心跳的时间点之间的时间延迟基本上对应于血压脉冲在对象的肺部处的到达时间点与根据所测量的呼吸压力和/或流量检测到的血压脉冲的到达时间点之间的时间延迟。因此,在确定t
arr_pulm
和t
hb
时不需要时间延迟补偿,这有利于确定血液动力学参数并使该确定更精确。
[0044]
就像t
arr_pulm
一样,心跳的时间点t
hb
可以直接根据所测量的呼吸压力和/或所测量的呼吸流量的变化来确定,这意味着在确定t
hb
时不使用其他物理量,并且无需计算和分析压力与流量之间的特定关系即可确定t
hb
。
[0045]
可以根据所测量的呼吸压力和/或所测量的呼吸流量的大小变化来确定心跳的时间点t
hb
。例如,t
hb
可以被确定为所测量的呼吸压力和/或所测量的呼吸流量达到阈值的时间点。
[0046]
替选地,可以通过分析呼吸压力曲线和/或呼吸流量曲线的曲率来确定t
hb
,所述呼吸压力曲线和/或呼吸流量曲线分别表示所测量的呼吸压力和所测量的呼吸流量随时间的变化。例如,可以基于呼吸压力曲线和/或呼吸流量曲线的相对于时间的一阶和/或二阶导数的变化来确定t
hb
。这是有利的,因为与在心跳时的呼吸压力曲线和呼吸流量曲线的幅度相比,呼吸压力曲线和/或呼吸流量曲线的一阶和/或二阶导数可能受到更大程度的影响。因此,研究一阶和/或二阶导数的变化可以提供对心跳时间的更加精确和/或鲁棒的估计。
[0047]
该方法还可以包括以下步骤:基于指示心跳的近似时间点的至少一个参数来估计心跳的时间窗口;以及基于在所估计的时间窗口期间测量的呼吸压力和/或呼吸流量来确定t
hb
。这可以防止不是由心跳引起的所测量的呼吸压力和/或流量的波动被误认为是由心跳引起的心源性振荡,并且因此使得该方法更鲁棒。
[0048]
可以根据指示心跳的近似时间点的任何参数来估计心跳的时间窗口,包括但不限于
[0049]-血压脉冲到对象的肺部的所确定的到达时间t
arr_pulm
;
[0050]-一个或更多个先前心跳的时间点;
[0051]-由一个或更多个先前心跳生成的一个或更多个先前血压脉冲在对象的肺部处的到达时间点;
[0052]-与距对象的心脏已知或可假定距离处的身体部位中的血氧合相关的血氧合数据;以及
[0053]-与距对象的心脏已知或可假定距离处的身体部位中测量的全身血压相关的全身血压数据。
[0054]
特别地,在对心跳的时间窗口的估计中使用血氧合数据可能是有利的。
[0055]
在大多数情况下,与肺流量诱发的心源性振荡(即在肺流量到达对象的肺部时由肺容积的变化引起的心源性振荡)相比,心跳诱发的心源性振荡(即由心跳期间心脏与肺部接触引起的心源性振荡)更难从所测量的呼吸压力和/或流量中识别。因此,如上所述,可以期望估计心跳的时间窗口并且仅在所述时间窗口内搜索心跳,以便能够以足够的确定性来识别心跳的时间点t
hb
。
[0056]
例如,可以基于多个先前检测到的心跳的时间点来确定所估计的心跳的时间窗口。例如,可以基于先前的心跳的时间点和对象的心率来确定时间窗口,所述对象的心率基于多个先前的心跳的时间点来计算。另外地,通气对象的设置呼吸速率(rr)可以用于更可靠和/或更准确地估计心跳的时间窗口。
[0057]
替选地或另外,可以基于指示心跳本身的传感器数据来追溯地确定所估计的心跳的时间窗口。例如,可以基于血压脉冲到对象的肺部的所确定的到达时间点t
arr_pulm
来追溯地确定所估计的心跳的时间窗口。所确定的t
arr_pulm
可以与与t
arr_pulm
的确定相关联的不确定性一起使用,以设置所估计的心跳的时间窗口的边界。在其中t
arr_pulm
比t
hb
更容易根据所测量的呼吸压力和/或流量检测到的情况下,这种类型的心跳的时间窗的追溯确定可能特别有利。
[0058]
根据另一示例,可以基于血氧合测量来追溯地确定心跳的时间窗。血氧合测量可以例如通过附接至通气对象的身体部位的脉冲血氧仪来获得,从而可以基于由脉冲血氧仪记录的血氧合变化的时间点来确定心跳的时间窗口。血氧合变化的时间点连同与其确定相关联的不确定性可以一起用于设置所估计的心跳的时间窗口的边界。作为脉冲血氧仪的替选,用于测量全身血压的血压计(即,基于袖带的血压监测仪)可以用于确定在心跳之后全身血压脉冲到达测量点处的时间点。根据上述原理,全身血压脉冲到达测量点处的时间点可以用于追溯地估计心跳的时间窗口。
[0059]
在其他实施方式中,可以使用用于心跳监测的常规手段来确定t
hb
。根据一些方面,该方法可以包括以下步骤:获得通气对象的心脏的电活动的心电图(ecg),以及使用该ecg来确定t
hb
。
[0060]
例如,可以使用常规表面电极或食道ecg导管来确定ecg。替选地,可以根据由食管导管记录的用于测量通气对象的隔膜(edi)的电活动的原始信号来确定ecg,当以神经调节通气辅助(nava)模式操作时该原始信号也可以用于提取用于控制提供对象的机械通气的呼吸装置的edi信号。
[0061]
当根据所测量的呼吸压力和/或呼吸流量的变化确定t
arr_pulm
和/或t
hb
时,优选地,针对呼吸流量相对较低时的吸气或呼气的最终阶段期间发生的心跳确定t
arr_pulm
和/或t
hb
。这有助于识别呼吸压力和血流中的心源性振荡,并且因此提高所提出方法的鲁棒性。
[0062]
可以通过以下附加步骤来实现该特征:确认所确定的t
arr_pulm
和/或t
hb
与在呼吸的低流量时段例如吸气或呼气的最终阶段期间发生的心跳相关,并且仅在可以确认在呼吸的低流量时段期间发生心跳的情况下根据t
arr_pulm
和/或t
hb
确定血液动力学参数。
[0063]
该方法还可以包括以下步骤:基于t
arr_pulm
和t
hb
来确定血压脉冲沿着对象的肺动脉传播的肺脉冲传输时间(ptt);以及基于肺ptt来确定血液动力学参数。
[0064]
肺ptt可以被确定为t
hb
与t
arr_pulm
之间的时间差,这意味着肺ptt可以被确定为由心脏的实际搏动引起的所测量的呼吸压力和/或流量的第一变化与由所述心跳生成的血压
脉冲到达通气对象的肺部生成的肺容积的变化引起的所测量的呼吸压力和/或流量的第二变化之间的时间差。
[0065]
如上面提到的,血液动力学参数可以是通气对象的pbp或pco。
[0066]
可以根据以下关系确定pbp
[0067][0068]
其中α是常数,ptt是根据上面提到的原理确定的肺ptt,r是肺动脉的内半径,ρ是血液密度,l2是肺动脉的长度,h是肺动脉壁厚度,以及e0是肺动脉壁的零压力弹性模量。
[0069]
可以根据以下关系确定pco
[0070]
pco=k
×
(α
×
ptt+β)
×
hr
[0071]
其中α是常数,k和β是适合于通气对象(3)的常数,ptt是根据上面提到的远离确定的肺ptt,以及hr是通气对象的心率。
[0072]
血液动力学参数还可以是通气对象的心脏分流,该心脏分流基于pco与通气对象的全身心输出量(sco)之间的关系来确定。例如,可以根据sco与pco之间的差确定通气对象的心脏分流,其中pco可以根据上述原理来确定。在机械通气期间中心脏分流的这种非侵入性确定可以例如用于诊断心室间隔缺损(vsd)。
[0073]
该方法还可以包括将所确定的血液动力学参数呈现给提供对象的机械通气的呼吸装置的操作者或者其他医疗人员的步骤。例如,所确定的血液动力学参数可以在执行对象的机械通气的呼吸装置的显示器上显示,或者在用于监测通气的对象的患者监测仪的显示器上显示。该方法还可以包括在所确定的血液动力学参数落在预定范围之外的情况下生成警报信号的步骤。
[0074]
根据本公开内容的另一方面,提供了一种包括计算机的通气系统,该计算机被配置成基于对象的心跳的时间点t
hb
和由心跳引起的血压脉冲到达对象的肺部处的到达时间点t
arr_pulm
执行上述非侵入性地确定机械通气对象的血液动力学参数的方法。
[0075]
该计算机被配置成获得呼吸压力和/或呼吸流量的测量值,并且根据由血压脉冲到达对象的肺部导致的肺容积的变化而引起的所测量的呼吸压力和/或呼吸流量的变化来确定t
arr_pulm
。该计算机可以是执行对象的机械通气的呼吸装置例如通气机或麻醉机的计算机,或者可以是用于监测通气对象的患者监测仪的计算机。其还可以是配置成接收由通气系统的传感器获得的呼吸压力和/或流量测量的外部计算机。
[0076]
通气系统可以包括至少一个压力传感器和/或至少一个流量传感器,所述至少一个压力传感器和/或至少一个流量传感器用于在确定对象的血液动力学参数时获得由计算机使用的呼吸压力和/或呼吸流量测量。至少一个压力传感器和/或至少一个流量传感器可以是呼吸装置的内部传感器或者连接至呼吸装置的外部传感器、患者监测仪或用于基于所测量的呼吸压力和/或流量确定血液动力学参数的外部计算机。
[0077]
计算机可以被配置成根据上述原理中的任何一个来确定t
arr_pulm
。
[0078]
同样,计算机可以被配置成根据上述原理中的任何一个来确定t
hb
。
[0079]
例如,计算机可以被配置成根据所测量的呼吸压力和/或呼吸流量的变化来确定
t
arr_pulm
和t
hb
两者。替选地,计算机可以被配置成根据所测量的呼吸压力和/或呼吸流量的变化来确定t
arr_pulm
,并且根据ecg来确定t
hb
。为此,通气系统可以还包括用于记录对象的心脏的电活动的ecg的ecg传感器,从而计算机可以被配置成使用ecg来确定心跳的时间点。例如,通气系统可以包括用于记录edi信号的配备有电极的食道导管,所述edi信号允许呼吸装置基于所记录的edi信号以nava模式操作。在这种情况下,通气对象的ecg可以由计算机从所记录的包括edi分量和ecg分量两者的原始信号中提取,如本领域公知的。因此,在一些实施方式中,通气系统的ecg传感器可以是用于测量通气对象的隔膜的电活动的食道导管。在其他实施方式中,ecg传感器可以包括一组表面电极。在又一其他实施方式中,ecg传感器可以是专用于记录ecg信号的食道ecg导管。
[0080]
使通气系统能够执行上述方法的步骤所需的逻辑通常借助于软件来实现。因此,根据本公开内容的另一方面,提供了一种用于非侵入性地确定机械通气对象的血液动力学参数的计算机程序,该确定基于对象的心跳的时间点t
hb
和由心跳引起的血压脉冲到达对象的肺部处的到达时间点t
arr_pulm
。该计算机程序包括计算机可读代码段,该计算机可读代码段在由通气系统的计算机执行时使计算机以下操作:
[0081]-获得呼吸压力和/或呼吸流量的测量值,以及
[0082]-根据由血压脉冲到达对象的肺部导致的肺容积的变化而引起的所测量的呼吸压力和/或呼吸流量的变化来确定t
arr_pulm
。
[0083]
该计算机程序可以例如被存储在装置的非易失性存储器中。
[0084]
将计算机程序安装在被配置成获得呼吸气体压力和/或呼吸气体流量测量值的现有装置例如常规呼吸装置和配备有用于测量呼吸压力和呼吸流量中的任何一者或两者的传感器的患者监测仪上,可以允许现有装置在无需任何硬件修改的情况下执行本公开内容的方法。
[0085]
在下文中的实施方式的详细描述中将描述所提出的方法、装置和计算机程序的更多的有利方面。
附图说明
[0086]
根据下文中提供的详细描述和仅以示例的方式给出的附图,将更充分地理解本发明。在不同的附图中,相同的附图标记对应于相同的元件。
[0087]
图1示出了包括能够非侵入性地确定通气患者的血液动力学参数的呼吸装置的通气系统。
[0088]
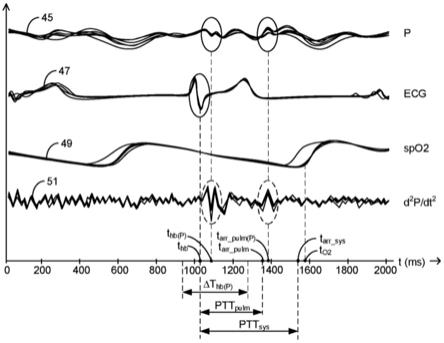
图2示出了可以用于确定血液动力学参数的测量量的曲线。
[0089]
图3a至图3b是示出用于非侵入性确定与机械通气患者的肺循环系统有关的血液动力学参数的方法的各方面的流程图。
[0090]
图4a至图4b是示出用于非侵入性确定与机械通气患者的任何肺或全身循环系统有关的血液动力学参数的方法的各方面的流程图。
[0091]
图5是示出用于非侵入性确定机械通气患者的血液动力学参数的方法的另一方面的流程图。
具体实施方式
[0092]
图1示出了包括呼吸装置2的通气系统1的示例性实施方式,该呼吸装置2被配置成根据本文公开的原理来确定机械通气的对象3(在下文中被称为患者)的血液动力学参数。呼吸装置2可以是能够通过向对象的气道供应加压的呼吸气体来向对象3提供通气辅助的任何类型的装置。通气机和麻醉机是这种呼吸装置的非限制性示例。
[0093]
呼吸装置2经由患者回路连接至患者3,该患者回路包括用于向患者3供应呼吸气体的吸气管线5和用于将呼出气体从患者3输送出去的呼气管线7。吸气管线5和呼气管线7经由所谓的y形件11连接至公共管线9,该公共管线经由患者连接器13例如面罩或气管内导管连接至患者3。
[0094]
呼吸装置2包括控制单元或控制计算机15,以用于基于预设参数和/或由呼吸装置的各种传感器获得的测量值来控制患者3的通气。控制计算机15通过控制呼吸装置2的气动单元17来控制患者3的通气,该气动单元17一方面连接至一个或更多个气体源19、21,并且另一方面连接至吸气管线5,以用于调节传送至患者3的呼吸气体的流量和/或压力。气动单元17可以包括通气领域中公知的各种气体混合和调节装置,例如气体混合室、可控气体混合阀、涡轮机、可控吸气和/或呼气阀等。气动单元17经由呼吸装置2的内部吸气流动通道连接至患者回路的吸气管线5,并且经由呼吸装置的内部呼气流动通道连接至患者回路的呼气管线7。在呼吸装置的操作期间被布置成与患者3的气道流体连通的通气系统1的气体流动路径在本文中可以被称为通气系统的呼吸回路。呼吸回路至少包括患者回路以及呼吸装置2的吸气流动通道和呼气流动通道。
[0095]
控制计算机15包括处理器或处理单元23例如微处理器,以及存储一个或更多个计算机程序的非易失性存储硬件设备25,所述一个或更多个计算机程序用于根据本文描述的原理控制呼吸装置2的操作以及确定患者3的血液动力学参数。除非另有说明,否则下文中描述的动作和方法步骤由呼吸装置2的控制计算机15在由处理单元23执行存储在存储器25中的计算机程序的不同代码段时执行或引起。
[0096]
根据本公开内容的原理,该计算机程序可以包括代码段,该代码段在被执行时使控制计算机15基于患者的心跳的时间点(t
hb
)和由心跳引起的血压脉冲到达患者的肺部处的到达时间点(t
arr_pulm
)来确定通气患者3的血液动力学参数。代码段可以使控制计算机获得呼吸压力和/或呼吸流量的测量值,并且根据由血压脉冲到达患者的肺部引起的肺容积的变化而导致的测量的呼吸压力和/或呼吸流量的变化来确定t
arr_pulm
。
[0097]
如以上简要讨论的那样,由血压脉冲到达通气患者的肺部引起的呼吸压力或流量的变化通常被称为心源性振荡。基本上存在两种不同类型的心源性振荡:肺流量诱发的心源性振荡和心跳诱发的心源性振荡。肺流量诱发的心源性振荡是由于心跳产生的血压脉冲到达对象的肺部而引起的肺容积的变化而导致的心源性振荡。心跳诱发的心源性振荡是由于心跳期间心脏对肺部组织的物理冲击而引起的压力脉冲在肺部组织中的传播而导致的心源性振荡。
[0098]
因此,可以说该计算机程序使控制计算机15基于所监测的呼吸压力和/或呼吸流量中的肺流量诱发的心源性振荡来确定t
arr_pulm
。
[0099]
通气系统1包括用于测量呼吸气体流量的流量传感器33和用于测量呼吸气体压力的压力传感器37中的至少一个。在图1所示的示例性实施方式中,流量传感器33位于y形件
11中或y形件附近,并且被配置成测量吸气期间朝向患者3传送的呼吸气体的吸气流量和呼气期间由患者3呼出的气体的呼气流量两者。同样,压力传感器37位于y形件11中或y形件11附近,并且被配置成在吸气和呼气二者期间测量接近的患者压力,该患者压力基本上对应于并且通常被称为患者3的气道压力。由流量传感器33和压力传感器37获得的测量信号经由各自的信号线35、39传输至控制计算机15,由此控制计算机将测量信号用于患者3的血液动力学参数的确定。根据通气领域公知的原理,由控制计算机15从流量和/或压力传感器33、37接收的流量和/或压力测量信号还可以由控制计算机15用于呼吸装置2的操作的自动反馈控制。
[0100]
作为患者回路的y形件11中的流量传感器33和/或压力传感器37的替选或补充,呼吸装置2可以包括用于测量呼吸气体流量的一个或更多个内部流量传感器,以及/或者用于测量呼吸气体压力的一个或更多个内部压力传感器。例如,呼吸装置2可以包括用于测量呼吸装置的吸气流动通道中的呼吸气体的流量的流量传感器33',以及/或者用于测量呼吸装置的吸气流动通道中的气体压力的压力传感器37'。替选地或另外,呼吸装置2可以包括用于测量呼吸装置的呼气流动通道中的呼气气体的流量的流量传感器33”,以及/或者用于测量呼吸装置的呼气流动通道中的气体压力的压力传感器37”。
[0101]
由控制计算机15使用以确定血液动力学参数的呼吸压力和/或流量测量值可以通过图1所示的示例性流量和压力传感器33至33”、37至37”中的任一个或任何组合或者通过设置在通气系统1的呼吸回路中其他地方的用于测量呼吸流量和/或呼吸压力的压力和/或流量传感器来获得。
[0102]
在另一示例中,由控制计算机15使用以确定血液动力学参数的呼吸压力和/或流量测量值可以通过插入患者3的气管中的压力和/或流量传感器来获得。这样的压力和/或流量传感器可以例如安装在用于在通气期间对患者3进行插管的气管导管上。根据下面在下文中的描述将认识到,可能是有利的是,使用位于患者3的气道开口附近的压力和/或流量传感器例如位于y形件11中或甚至位于患者3的气管中的传感器,以使患者3的肺部与压力和/或流量测量点之间的距离最小化。
[0103]
控制计算机15可以被配置成根据呼吸压力和/或流量测量值得出呼吸压力曲线和/或呼吸流量曲线,并且在呼吸装置2的显示器(未示出)上呈现呼吸压力曲线和/或呼吸流量。控制计算机15可以通过分析呼吸压力曲线和/或呼吸流量曲线的幅度和/或曲率的变化来识别和量化所测量的呼吸压力和/或呼吸流量的变化。在下文中,术语“呼吸曲线”有时可以用作分别代表所测量的呼吸压力和所测量的呼吸流量的呼吸压力曲线或呼吸流量曲线中的任一个的总称。
[0104]
通气系统1还包括ecg传感器装置28,该ecg传感器装置28被配置成记录指示通气患者3的心脏的电活动的ecg信号。由ecg传感器装置29记录的与ecg有关的信号经由信号线30传输至呼吸装置2的控制计算机15。然后,控制计算机15可以将ecg信号用于确定患者3的血液动力学参数,如下面进一步描述的。
[0105]
在所示的实施方式中,呼吸装置2是nava使能通气机,其包括与呼吸装置1的控制计算机15耦合的生物电传感器装置。生物电传感器装置包括用于记录患者3的隔膜emg的肌电图(emg)检测器。emg检测器包括食道导管29,食道导管29载有用于捕获来自患者3的隔膜的emg信号的电极31的阵列。电极31产生许多子信号,所述许多子信号由控制计算机15处理
以计算代表隔膜的电活动(eadi)的信号(edi信号)。由于传感器所捕获的emg信号用于计算edi信号,因此在通气领域内,食道导管29通常被称为edi导管。
[0106]
除了edi信号之外,控制计算机15被配置成根据记录的隔膜emg得出ecg信号,该ecg信号指示患者的心脏的电活动。如何从食道导管29的电极捕获的隔膜emg中提取ecg信号在本领域中是公知的,并且在例如us8527036中公开。因此,在该示例性实施方式中,ecg传感器装置28是构成组合的edi和ecg传感器装置的生物电传感器装置。
[0107]
在其他实施方式中,可以使用其他类型的传感器来捕获通气患者3的ecg信号。例如,可以使用放置在通气患者3的皮肤上的常规ecg表面电极。
[0108]
通气系统1还包括血氧传感器41例如脉冲血氧仪,用于获得通气患者血液中的氧含量或浓度的测量值。血氧传感器41可以附接至患者3的身体部位,例如指尖、耳垂或脚,以便获得与该特定身体部位中的血氧合有关的血氧合数据。血氧合数据可以例如包括关于外围氧饱和度(spo2)的数据。血氧合数据可以经由信号线43传输至呼吸装置2的控制计算机15,由此控制计算机15可以将接收到的血氧合数据用于确定患者3的血液动力学参数,如下面进一步描述的。
[0109]
图2示出了呼吸压力曲线45、ecg 47、spo2曲线49和代表呼吸压力曲线45的二阶时间导数(p”)的曲线51。仅用于说明不同心跳之间的相应量的变化,针对相应量示出了在不同心跳期间获得的多个曲线。
[0110]
现在同时参照图1,呼吸压力曲线45、ecg 47、spo2曲线49和p”曲线51可以由呼吸装置2的控制计算机15根据通气系统1的传感器在包括患者3的心跳的时间段期间获得的测量值而得出。呼吸压力曲线45是可以由控制计算机15基于从压力传感器37至37”中的任一个或任何组合接收到的测量值而得出的示例性呼吸曲线。例如,呼吸压力曲线45可以代表患者3的气道压力(p
aw
)。ecg 47可以由控制计算机15基于由ecg传感器装置28获得的测量值来得出。spo2曲线可以由控制计算机15基于由血氧传感器41获得的测量值来得出。p”曲线51可以由控制计算机根据呼吸压力曲线45来得出。
[0111]
当患者3的心脏跳动时,脉冲通过患者的肺部组织传播,并且进一步经由患者的肺部和气道中的气体进入通气系统1的呼吸回路。可以通过研究根据呼吸回路中的传感器测量值得出的呼吸曲线例如图2中的呼吸压力曲线45的幅度或曲率变化来检测该气体脉冲,该气体脉冲在下文中被称为心跳诱发的气体脉冲。如上所述,呼吸曲线的这种变化通常被称为心跳诱发的心源性振荡。
[0112]
心跳诱发的气体脉冲到达呼吸回路中的压力测量点会引起呼吸压力曲线45的曲率的特征变化。在图2中,针对呼吸压力曲线45的曲率的特征变化的时间点被表示为t
hb(p)
。控制计算机15可以被配置成检测该变化并且使用它来计算心跳的实际时间点t
hb
。心跳的实际时间点t
hb
可以由控制计算机15确定为呼吸压力曲线45的曲率的特征变化发生的时间点t
hb(p)
减去已知的时间延迟。时间延迟取决于例如组织中的脉冲传播速度和距离、气体中的脉冲传播速度和距离以及传感器系统的测量延迟。在其他实施方式中,控制计算机15可以被配置成忽略时间延迟并且将t
hb
设置成等于t
hb
(p)。
[0113]
此外,当患者3的心脏跳动时,从心脏朝患者的肺部泵送脱氧血流。该血液流构成了血压脉冲,该血压脉冲经由肺动脉从心脏朝患者的肺部传播。当血压脉冲到达患者的肺部处时,肺毛细血管的扩张引起血压脉冲传播至肺泡气体中。这样产生的气体脉冲(下文中
称为血液脉冲诱发的气体脉冲)也可以通过研究根据呼吸回路中的传感器测量值得出的呼吸曲线例如图2中的呼吸压力曲线45的幅度或曲率的变化来检测。如上所述,呼吸曲线的这样变化通常称为肺流量诱发的心源性振荡。
[0114]
血液脉冲诱发的气体脉冲到达呼吸回路中的压力测量点引起呼吸压力曲线45的曲率的特征变化。在图2中,用于呼吸压力曲线45的曲率的该特征变化的时间点被表示为t
arr_pulm(p)
。控制计算机15可以被配置成检测该变化并且使用它来确定血压脉冲到患者3的肺部的到达时间点t
arr_pulm
。在一些实施方式中,可以忽略从血压脉冲到达患者3的肺部与检测到呼吸回路中血液脉冲诱发的气体脉冲之间的小的时间延迟,由此可以将t
arr_pulm
假定为对应于t
arr_pulm(p)
。在其他实施方式中,可以考虑时间延迟,由此可以由控制计算机15通过将t
arr_pulm(p)
减去特定时间延迟来计算t
arr_pulm
,该时间延迟取决于脉冲传播速度和距离以及传感器系统的测量延迟。
[0115]
为了使根据呼吸曲线例如呼吸压力曲线45检测到心跳诱发的气体脉冲和/或血液脉冲诱发的气体脉冲的机会最大化,控制计算机15可以被配置成执行基于在呼吸的低流量时段(即,呼吸回路中的低呼吸流量的时段)期间并且优选地在基本上恒定流量时段期间发生的心跳来执行患者3的肺血压的确定。低流量时段可以例如是吸气的最终阶段或呼气的最终阶段。替选地,控制计算机15可以被配置成在呼吸回路中基本上零流量的时段期间例如在吸气暂停、呼气暂停或者甚至阻塞操作期间执行确定。在下文中,将假定基于在吸气的最后阶段期间发生的心跳来进行血液动力学参数的确定。在吸气结束时,呼吸回路中呼吸气体的流量低,并且患者2的肺压力基本上恒定,从而有助于根据由控制计算机15得出的呼吸压力或流量曲线检测心跳诱发的气体脉冲和血液脉冲诱发的气体脉冲。为此,控制计算机15可以被配置成仅在吸气末时间窗口内分析呼吸曲线,以识别心跳的时间点t
hb
和/或血压脉冲到患者的肺部的到达时间点t
arr_pulm
。
[0116]
控制计算机15可以被配置成通过分析呼吸曲线的幅度来确定心跳的时间点t
hb
和血压脉冲到患者3的肺部的到达时间点t
arr_pulm
中的任何一个或两个。例如,t
hb
和/或t
arr_pulm
可以由控制计算机15基于一个或更多个预定阈值的呼吸曲线的交点来确定。然而,在这种情况下,测量噪声以及呼吸回路中的自然压力和流量波动可能会引起“错误触发”,并且因此使脉冲的检测变得困难。因此,为了提高该方法的鲁棒性,代替分析呼吸曲线的幅度或者除了分析呼吸曲线的幅度之外,控制计算机15还可以被配置成分析呼吸曲线的曲率。
[0117]
例如,控制计算机15可以被配置成研究呼吸曲线的一阶和/或二阶时间导数,并且优选地研究呼吸曲线的二阶时间导数。如由图2中的p”曲线51所示,在研究二阶导数时,由心跳和血液脉冲诱发的气体脉冲到达传感器引起的呼吸压力曲线45的特征变化变得甚至更加明显,从而有助于t
hb
和t
arr_pulm
的确定。如上所述,进一步有助于t
hb
和/或t
arr_pulm
的确定,控制计算机15可以被配置成仅在具有低呼吸流量的时间窗口例如吸气末或呼气末时间窗口内分析p”曲线。
[0118]
在一些实施方式中,控制计算机15可以被配置成使用与通气患者3的身体部分中的血液的氧合有关的血氧合数据,以进一步有助于心跳诱发的气体脉冲的检测和t
hb
的确定。根据一个示例,控制计算机15可以使用由图2所示的血氧传感器41记录的spo2曲线49。通过分析获得的血氧合数据,控制计算机15可以基于所测量的血氧合的变化(增加)来确定心跳的近似时间。通过首先确定心跳的近似时间,有助于呼吸曲线中心跳诱发的气体脉冲
的检测。心跳的近似时间可以由控制计算机15基于检测到氧合的变化的时间(在图2中表示为t
o2
)和估计的针对全身血压脉冲从患者的心脏传播至血氧测量点的全身ptt来确定。全身ptt可以基于测量的或假定的患者的心脏与测量点之间的距离(对于指尖测量,通常估计为0.5x患者长度)、测量的或假定的患者的全身血压以及假定的患者的全身动脉的顺应性来估计。通常,全身ptt由控制计算机15基于单独的通气患者3的身体测量来估计。例如,控制计算机15可以被配置成基于由操作员输入至呼吸装置2的患者数据例如与通气患者3的高度有关的患者数据来估计全身ptt。
[0119]
例如,可以通过使控制计算机15确定针对心跳的时间窗口(在图2中表示为δt
hb(p)
)来实现上述功能,在该时间窗口内可以假定心跳诱发的气体脉冲引起呼吸曲线中的可检测的变化。可以由控制计算机15基于心跳的近似时间的确定中的不确定性来设置时间窗口δt
hb(p)
的边界。然后,控制计算机15可以被配置成仅在所确定的针对心跳的时间窗口δt
hb(p)
内分析呼吸曲线的幅度和/或曲率。
[0120]
在其他实施方式中,控制计算机15可以使用除血氧合数据以外的数据以估计心跳的近似时间。例如,控制计算机15可以被配置成估计通气患者3的心率,并且使用所估计的心率来估计心跳的近似时间。例如,所估计的心率可以与针对至少一个先前的心跳的确定的时间点一起使用,以计算心跳的近似时间。根据上述原理,患者3的心率可以由控制计算机15基于根据呼吸曲线确定的针对心跳的多个先前确定的时间点来估计。此外,控制计算机15可以利用与患者3的正在进行的呼吸治疗有关的知识,以更准确地估计心跳的近似时间。对象的心率和心跳时机高度地受对象的呼吸率和呼吸时机的影响。因此,控制计算机15可以被配置成使用指示患者3的呼吸阶段的传感器数据,以进一步提高心跳的近似时间的估计。这样的传感器数据可以与患者3的呼吸压力、呼吸流量和/或指示呼吸动力的生物电信号例如edi信号有关。根据上述示例,控制计算机15可以在估计了心跳的近似时间之后限定针对心跳的时间窗口,在该时间窗口中,分析呼吸曲线以确定针对心跳的更准确的时间。
[0121]
此外,控制计算机15可以被配置成基于血压脉冲到患者3肺部的确定的到达时间点t
arr_pulm
来追溯地计算心跳的近似时间。可能存在下述情形:在该情形下,心跳诱发的气体脉冲弱且难以在呼吸曲线中识别,而血压诱发的气体脉冲强足以被检测到。在这样的情况下,检测到血液脉冲诱发的气体脉冲的时间可以提供关于心跳近似时间的有价值的信息。一旦确定了到达时间t
arr_pulm
,控制计算机15就可以基于血压脉冲从心脏传播到患者3的肺部的估计的肺ptt来计算心跳的近似时间。估计的肺ptt可以由控制计算机15基于由操作员输入至呼吸装置2的患者数据来估计,或者估计的肺ptt可以基于一个或更多个先前心跳的时间点和一个或更多个先前血压脉冲到达患者3的肺部处的时间点来估计。根据上述示例,然后,控制计算机15可以使用心跳的近似时间来限定时间窗口,在该时间窗口中,进一步分析呼吸曲线以识别心跳的实际时间点,或者更确切地说时间点t
hb(p)
,根据时间点t
hb(p)
可以确定心跳的实际时间点t
hb
。
[0122]
在其他情形下,可以使用一种或更多种上述技术来检测心跳诱发的气体脉冲,而血压诱发的气体脉冲更难以检测。在这样的情况下,控制计算机15可以被配置成在确定t
arr_pulm
时使用t
hb
。例如,控制计算机15可以被配置成基于所确定的t
hb
和所估计的肺ptt计算血压脉冲到患者3的肺部的近似到达时间。然后,控制计算机15可以基于所计算的近似到达时间来确定血压脉冲到达患者3的肺部的时间窗口,并且分析所确定的时间窗口内的呼
吸曲线以有助于识别时间点t
arr_pulm(p)
,根据时间点t
arr_pulm(p)
可以确定血压脉冲的实际到达时间点t
arr_pulm
。
[0123]
以上,已经描述了控制计算机15如何根据从呼吸回路中的呼吸压力和/或流量测量值得出的呼吸曲线确定心跳的时间点t
hb
和血压脉冲到患者3的肺部的到达时间点t
arr_pulm
两者。然而,在患者3的ecg可用的情形下,例如在附图中示出的情形中,控制计算机15可以有利地被配置成使用ecg信号来确定心跳的时间点t
hb
。例如,控制计算机15可以被配置成分析ecg并且根据r波在ecg qrs复合波中的位置来确定心跳的时间点t
hb
。
[0124]
此外,上面参照图2中的呼吸压力曲线45已经描述了确定心跳的时间点t
hb
和血压脉冲到患者的肺部的到达时间点t
arr_pulm
相关的步骤。然而,应当注意,可以采取相同或相似的步骤,以根据从呼吸气体流量测量获得的呼吸流量曲线来确定心跳的时间点和血压脉冲到患者的肺部的到达时间点。在具有零呼吸回路阻力和对所施加的气道压力的理想控制的呼吸装置中,所测量的压力(也用于在通气的压力控制模式下控制对患者的呼吸气体的供应)通常在吸气的主要部分和呼气的最后阶段期间固定,并且任何压力波动都将被立即补偿。对于这样的理想通气机,在呼吸的这些时段期间,将不会有任何压力变化(并且因此没有可检测到的心跳或血液脉冲诱发的压力变化),而流量的变化将是心跳和血压脉冲到达患者的肺部的唯一指标。然而,对于具有非零的患者回路阻力和对所施加的呼吸道压力的非理想控制的典型呼吸装置,心跳和血液脉冲诱发的压力变化可能比心跳和血液脉冲诱发的流量变化更容易地被检测到。因此,根据呼吸装置的特征,可以有利的是,在确定心跳的时间点和血压脉冲到患者的肺部的到达时间点时使用呼吸压力曲线或呼吸流量曲线。当然,尽管没有详细公开,但是在确定t
hb
和t
arr_pulm
时可以获得并使用呼吸压力和流量测量值两者。例如,控制计算机15可以被配置成获得呼吸压力曲线和呼吸流量曲线两者,并且将曲线彼此进行比较,以增加鲁棒性和/或提高在确定心跳的时间点和/或血压脉冲到患者的肺部的到达时间点时的准确性。
[0125]
一旦控制计算机15确定了心跳的时间点t
hb
和血压脉冲到患者3的肺部的到达时间点t
arr_pulm
,就可以基于所确定的t
hb
和t
arr_pulm
计算针对血压脉冲从心脏到患者的肺部的传播的肺脉冲传输时间ptt
pulm
。因此,如此确定的ptt
pulm
是实际的肺ptt,其表示用于由于心跳而使血压脉冲沿肺动脉从心脏传播至患者的肺部的传输时间。ptt
pulm
可以由控制计算机根据心跳与血压脉冲到达患者的肺部处之间所经过的时间即根据t
hb
与t
arr_pulm
之间的差来确定。然后,如此确定的ptt
pulm
可以例如根据下文中所述的原理被控制计算机15用来计算与患者的肺循环系统有关的不同的血液动力学参数。
[0126]
肺血压(pbp)的确定
[0127]
控制计算机15可以基于ptt
pulm
和心脏与肺之间的假定脉冲传播距离来计算血压脉冲的肺脉冲波速度pwv。假定脉冲传播距离可以例如由控制计算机15基于由操作员输入至呼吸装置2的患者数据例如与通气患者的身高有关的患者数据来确定。
[0128]
如本领域中众所周知的,血压脉冲的pwv可以表示为脉冲在其中传播的血管的容积弹性的函数。当血压上升时,血管的容积弹性增加,血管的壁变硬,并且pwv增加。因此,一旦已经使用本公开内容的原理确定了血压脉冲的肺pwv,则控制计算机15可以利用基于脉冲传播的血压确定的已知原理使用pwv来确定通气患者3的pbp。pbp与肺动脉中的血压脉冲的pwv成比例,并且比例常数取决于患者的肺动脉的弹性率。肺动脉的弹性以及确定的肺
pwv与患者3的pbp之间的比例常数可以由控制计算机15基于由操作员输入至呼吸装置2的患者数据例如与通气患者的年龄有关的患者数据来设置。在其他实施方式中,比例常数可以由呼吸装置2基于在涉及全身血压测量的校准过程期间获得的数据例如基于从常规的血压袖带测量得到的数据来确定。这样的数据可以由呼吸装置2自动获得或者可以由操作员手动输入至呼吸装置2。
[0129]
在示例性实施方式中,患者3的pbp可以由控制计算机15根据基于以下关系根据ptt
pulm
来计算:
[0130][0131]
其中,pbp是肺动脉血压,α是常数,ptt
pulm
是根据上述原理确定的肺脉冲传输时间,r是血管(即肺动脉)的内半径,p是血液密度,l是血管长度,h是血管壁厚度,并且e0是血管壁的零压力弹性模量。
[0132]
因此,通过根据测得的呼吸压力和/或流量中的心源性振荡来至少确定血压脉冲到通气患者3的肺的到达时间点t
arr_pulm
,本公开内容的原理允许肺ptt被确定并且以与上述根据现有技术的用于无袖带血压估计的技术中使用全身ptt的方式类似的方式使用,从而使得能够非侵入性地确定和监测通气患者3的pbp。
[0133]
应当注意,等式1没有考虑作用在血管上的外部压力的变化。然而,由于在呼吸期间肺组织的膨胀和收缩,肺动脉的外部压力可能发生相当显著的变化。作用在肺动脉上的外部压力取决于通气患者3的当前肺压力,因此,控制计算机15可以有利地被配置成在确定pbp时将通气患者的当前肺压力考虑在内。肺动脉上的外部压力的变化可以被认为是肺动脉的弹性率的变化。为了考虑肺压力的变化,控制计算机15因此可以被配置成确定作为肺压力的函数的肺动脉的弹性率。因此,根据一些实施方式,可以将等式1中的恒定零压力弹性模量e0换为肺动脉的可变且依赖于肺压力的弹性率e(p
lung
)。通气患者的肺压力可以近似于由呼吸装置的压力传感器37测得的压力或者根据由呼吸装置的压力传感器37测得的压力来计算,该压力基本上对应于患者3的气道压力。
[0134]
根据以上内容,应当理解,如本文所述的用于非侵入性地确定血液动力学参数的方法可以是用于基于对象的心跳的时间点t
hb
以及由心跳引起的血压脉冲到达对象的肺的到达时间点t
arr_pulm
来非侵入性地确定机械通气对象的pbp的方法。该方法可以包括以下步骤:测量呼吸压力和/或呼吸流量,以及根据测得的呼吸压力的变化和/或由于血压脉冲到达对象的肺而引起的肺容积的变化而导致的呼吸流量的变化来确定t
arr_pulm
。
[0135]
肺心输出量(pco)的确定
[0136]
通过临床实验已证实,即使在变化的血管阻力下,ptt与每搏量(sv)之间也存在负相关。因此,上述用于非侵入性地确定肺ptt的方法使得控制计算机15能够基于所确定的肺ptt和患者的心率来确定通气患者3的肺心输出量。例如,使用escco方法的原理,pco可以由控制计算机15根据以下关系来确定:
[0137]
pco=k
×
(α
×
ptt
pulm
+β)
×
hr
ꢀꢀꢀꢀ
(等式2)
[0138]
[0139]
其中,α是常数,ptt
pulm
是根据上述原理确定的肺脉冲传输时间,k和β是适用于通气患者3的常数,并且hr是患者的心率。
[0140]
因此,通过根据测得的呼吸压力和/或流量中的心源性振荡来至少确定血压脉冲到通气患者3的肺的到达时间点t
arr_pulm
,本公开内容的原理允许肺ptt被确定并且以与escco方法中使用全身ptt的方式类似的方式使用,从而使得能够非侵入性地确定和监测通气患者3的pco。
[0141]
根据以上内容,应当理解,如本文所述的用于非侵入性地确定血液动力学参数的方法可以是用于基于对象的心跳的时间点t
hb
以及由心跳引起的血压脉冲到达对象的肺的到达时间点t
arr_pulm
来非侵入性地确定机械通气对象的pco的方法。该方法可以包括以下步骤:测量呼吸压力和/或呼吸流量,以及根据测得的呼吸压力的变化和/或由于血压脉冲到达对象的肺而引起的肺容积的变化而导致的呼吸流量的变化来确定t
arr_pulm
。
[0142]
图3a是示出用于确定与机械通气患者的肺循环系统有关的血液动力学参数例如pbp或pco的方法的流程图。该方法可以由运行计算机程序的任何计算机化通气系统执行,该计算机程序包括使通气系统及其部件执行各种方法步骤的指令。当描述该方法时,将同时参照图1中的示例性通气系统1以及图2中所示的图。
[0143]
在第一步骤s31中,测量呼吸压力和/或呼吸流量。呼吸压力测量和/或呼吸流量可以通过一个或更多个压力传感器37-37’以及/或者一个或更多个流量传感器33-33’获得。
[0144]
在第二步骤s32中,确定通气对象3的心跳的时间点t
hb
。该确定可以由呼吸装置2的控制计算机15来进行。该确定可以基于测得的呼吸压力和/或呼吸流量的变化来进行,该变化表示由心跳诱发的心源性振荡。可选地,可以根据由通气系统1的ecg传感器29捕获的ecg信号来确定t
hb
。如上所述,由血氧传感器41捕获的血氧合数据也可以由控制计算机15使用以有利于t
hb
的确定。
[0145]
心跳产生血压脉冲形式的肺血流,该肺血流沿着肺动脉向通气对象3的肺传播。在第三步骤s33中,确定血压脉冲到达对象的肺的到达时间点t
arr_pulm
。该确定可以由控制计算机15进行,并且基于测得的呼吸压力和/或呼吸流量的变化来进行,该变化表示由血压脉冲到达对象的肺而引起的肺容积的变化而导致的由肺流量诱发的心源性振荡。
[0146]
在第四步骤s34中,基于确定的心跳的时间点t
hb
以及确定的血压脉冲到达对象的肺的时间点t
arr_pulm
来确定通气对象3的血液动力学参数。该确定可以由控制计算机15进行。
[0147]
如图3b所示,步骤s34可以包括根据t
hb
和t
arr_pulm
确定肺脉冲传输时间ptt
pulm
的步骤s341。然后可以在随后的步骤中例如使用等式1和等式2定义的关系使用ptt
pulm
来确定pbp(步骤s342a)或pco(步骤s342b)中的任一个或两者。
[0148]
全身血压(sbp)和全身心输出量(sco)的确定
[0149]
应当理解,可以独立于根据由肺流量诱发的心源性振荡确定血压脉冲到达通气患者3的肺的到达时间点t
arr_pulm
的原理来使用根据测得的呼吸压力和/或流量中的由心跳诱发的心源性振荡确定心跳的时间点t
hb
的上述原理。根据呼吸压力和/或呼吸流量测量值确定t
hb
是有利的,尤其是在机械通气期间,原因在于呼吸压力和流量测量值可以从通气系统的常规压力和流量传感器容易获得,以及在确定时不需要附加的设施。
[0150]
如上所示,如根据由心跳诱发的心源性振荡确定的t
hb
可以与t
arr_pulm
一起使用来确定肺ptt,ptt
pulm
,进而可以使用ptt
pulm
来确定与通气患者的肺循环系统有关的血液动力
学参数,例如pbp和pco。然而,t
hb
还可以与血压脉冲到达通气患者3的全身循环系统中的到达点的时间点一起使用,以便确定全身ptt,进而可以使用全身ptt来确定与通气患者的全身循环系统有关的血液动力学参数,例如sbp和sco。
[0151]
再次参照图2,时间点t
o2
表示检测到血氧合的变化的时间,如由血氧传感器41确定的。控制计算机15可以被配置成基于检测到血氧合的变化的时间点t
o2
来确定在t
hb
处产生的血压脉冲到通气患者3的全身循环系统中的到达点的表示为t
arr_sys
的到达时间点。在所示示例中,通气患者3的循环系统中的血压脉冲的到达点是患者指尖的动脉,在该动脉中的血氧合是由血氧传感器41确定的。
[0152]
该到达时间点t
arr_sys
可以由控制计算机15对应于检测到血氧合的变化的时间点t
o2
来确定,或者该到达时间点t
arr_sys
可以通过将t
o2
减去由传感器系统的测量延迟导致的已知时间延迟来确定。
[0153]
然后,控制计算机15可以根据t
hb
和t
arr_sys
确定血压脉冲从患者3的心脏传播到患者的指尖中的到达点的全身ptt,ptt
sys
。例如,控制计算机15可以根据t
hb
与t
arr_sys
之间的差来确定p
ttsys
。由此确定的ptt
sys
然后可以由控制计算机15使用来计算与患者3的全身循环系统有关的不同的血液动力学参数。
[0154]
例如,控制计算机15可以基于ptt
sys
确定通气患者3的sbp。根据一个示例,控制计算机15可以基于以下关系确定通气患者3的sbp:
[0155][0156]
其中,sbp是全身血压,α是常数,ptt
sys
是根据上述原理确定的全身脉冲传输时间,r是血管的内半径,p是血液密度,l是血管长度,h是血管壁厚度,e0是血管壁的零压力弹性模量。
[0157]
此外,控制计算机15可以基于ptt
sys
确定通气患者3的sco。根据一个示例,控制计算机15可以使用escco方法来确定通气患者3的sco,这意指可以基于以下关系来确定sco:
[0158]
sco=k
×
(α
×
ptt
sys
+β)
×
hr
ꢀꢀꢀ
(等式4)
[0159]
其中,α是常数,ptt
sys
是根据上述原理确定的全身脉冲传输时间,k和β是适用于通气患者3的常数,并且hr是患者的心率。
[0160]
根据以上内容,应当理解,可以使用根据在心跳期间由心脏对患者的肺的物理冲击而引起的测得的呼吸压力和/或流量的变化(即,根据由心跳诱发的心源性振荡)来确定t
hb
的所提出的方法来确定与通气患者的肺循环系统和全身循环系统有关的参数,包括但不限于pbp、pco、sbp和sco。
[0161]
因此,根据本公开内容的一方面,提供了一种用于基于对象的心跳的时间点t
hb
以及由心跳引起的血压脉冲到达对象的循环系统中的到达点的到达时间点t
arr_pulm
或t
arr_sys
来非侵入性地确定机械通气对象的血液动力学参数的方法。该方法包括以下步骤:确定呼吸压力和/或呼吸流量,以及根据在心跳期间由心脏对对象的肺的物理冲击而引起的测得的呼吸压力和/或呼吸流量的变化来确定t
hb
。
[0162]
图4a是示出用于确定与机械通气患者的肺循环系统或全身循环系统有关的血液
动力学参数例如pbp、pco、sbp或sco的方法的流程图。该方法可以由运行计算机程序的任何计算机化通气系统执行,该计算机程序包括使通气系统及其部件执行各种方法步骤的指令。当描述该方法时,将同时参照图1中的示例性通气系统1以及图2中所示的图。
[0163]
在第一步骤41中,测量呼吸压力和/或呼吸流量。呼吸压力测量和/或呼吸流量可以通过一个或更多个压力传感器37-37”和/或一个或更多个流量传感器33-33”获得。
[0164]
在第二步骤s42中,确定通气对象3的心跳的时间点t
hb
。该确定可以由呼吸装置2的控制计算机15来进行。该确定可以基于测得的呼吸压力和/或呼吸流量的变化来进行,该变化表示在心跳期间由心脏对通气对象的肺的物理冲击而引起的由心跳诱发的心源性振荡。
[0165]
在第三步骤s43中,确定由心跳产生的血压脉冲到达通气对象的循环系统中的到达点的到达时间点t
arr_pulm
或t
arr_sys
。血压脉冲可以是沿着肺动脉传播并且到达对象3的肺循环系统中的到达点例如到达对象的肺的肺血压脉冲。血压脉冲也可以是沿着全身动脉传播并且到达对象3的全身循环系统的到达点例如到达对象的指尖中的血氧测量点的全身血压脉冲。到达时间点可以基于所监测的参数的变化来确定,该变化指示血压脉冲到达到达点。当确定肺血压脉冲到达对象的肺循环系统中的到达点的时间点时,确定例如可以基于测得的呼吸压力和/或呼吸流量的变化来进行,该变化表示由血压脉冲到达对象的肺而引起的肺容积变化而导致的由肺流量诱发的心源性振荡。当确定全身血压脉冲到达对象的全身循环系统中的到达点的时间点时,确定例如可以基于在对象3的全身循环系统中测量点处的血氧合的变化来进行。
[0166]
在第四步骤s44中,根据确定的心跳的时间点t
hb
以及确定的血压脉冲到达对象的循环系统中的到达点的时间点t
arr_pulm
或t
arr_sys
来确定通气对象3的血液动力学参数。
[0167]
如果血压脉冲是到达对象的肺循环系统中的到达点的肺血压脉冲,则步骤s44对应于图3中的步骤s34。在这种情况下,血液动力学参数的确定可以包括以下步骤:根据t
hb
和t
arr_pul
确定肺脉冲传输时间ptt
pulm
(对应于图3中的步骤s341),以及根据ptt
pulm
确定pbp和pco中的任一个或两者(对应于图3中的步骤s342a和s342b)。
[0168]
如果血压脉冲是到达对象的全身循环系统中的到达点的全身血压脉冲,则步骤s44可以包括图4b中所示的步骤。在这种情况下,可以根据t
hb
和t
arr_sys
确定全身脉冲传输时间ptt
sys
(步骤s441),借此可以使用ptt
sys
来例如使用由等式3和等式4定义的关系确定sbp(步骤s442a)或sco(步骤s442b)中的任一个或两者。
[0169]
心脏分流的确定
[0170]
控制计算机15还可以被配置成基于根据以上原理确定的患者的pco与患者的sco之间的关系来确定通气患者3的心脏分流。可以以任何可设想的方式确定患者3的sco,但是有利地使用上述非侵入式sco确定的原理来确定患者3的sco。例如,患者3的心脏分流可以通过sco与pco之间的差确定。
[0171]
通气患者3的心脏分流可以有利地用于心室间隔缺损(vsd)的诊断。每千人中约2人至3人患有vsd,这是心室间隔的缺损,壁分开了心脏的左心室和右心室,导致心脏分流从左心室流入右心室。
[0172]
vsd的诊断是一项艰巨的任务,通常需要侵入性和/或昂贵的医疗设施。然而,所提出的用于心脏分流确定的方法使得能够以最少的附加设备来非侵入性地执行vsd的诊断。
[0173]
此外,如果在检查患者时患者处于没有产生心脏分流的生理状态,则大多数已知
的用于vsd诊断的技术(除了诸如心脏ct和mri等成像技术外)将不能检测到vsd。所提出的用于在机械通气期间确定心脏分流的方法的优点在于,在vsd的情况下,可以通过借助于改变呼吸装置的通气设置来使患者的肺系统暴露于增加的肺压力水平下,从而引发心脏分流。
[0174]
例如,控制计算机15可以被配置成基于在使用第一组通气设置对患者进行通气期间确定的sco值和pco值来确定患者3的心脏分流的第一值,所述第一组通气设置使第一呼吸压力被施加至患者;以及基于在使用第二组通气设置对患者进行通气期间确定的sco和pco来确定患者3的心脏分流的第二值,所述第二通气设置使第二且不同的呼吸压力被施加至患者。然后,控制计算机可以被配置成基于第一心脏分流值与第二心脏分流值之间的差来确定患者3是否患有vsd。换句话说,控制计算机15可以被配置成基于由施加至患者的呼吸压力的变化而导致的心脏分流的变化来确定通气患者3是否患有vsd。
[0175]
因此,根据本公开内容的另一方面,提供了一种用于基于对象的pco与sco之间的关系来非侵入性地确定机械通气对象的心脏分流的方法,其中,至少pco使用上述原理来确定。如图5所示,该方法包括确定pco和sco的步骤s51,以及根据pco和sco确定通气对象的心脏分流的步骤s52。在心脏分流确定中使用的pco可以是例如在步骤s342b中确定的pco(参见图3b),在心脏分流确定中使用的sco可以是例如在步骤s442b中确定的sco(参见图4b)。
[0176]
尽管上面已经将所提出的非侵入性地确定血液动力学参数的方法描述为由向患者3提供机械通气的呼吸装置2的控制计算机15执行,但是应当理解,该方法也同样可以由能够获得呼吸压力和/或呼吸流量的测量值的任何其他装置执行。例如,该方法可以由连接至流量传感器的患者监监护仪执行,以在对被监测的患者进行正在进行的通气治疗期间获得呼吸流量测量值。这种配备有流量传感器的患者监护仪可以存储有上述计算机程序,并且在由患者监护仪的计算机执行计算机程序时使患者监护仪执行上述方法中的任何方法。同样地,所提出的方法可以由独立计算机例如个人计算机(pc)执行,该独立计算机被配置成从通气系统1的压力传感器和/或流量传感器接收呼吸压力和/或呼吸流量测量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1