用于机器人手术系统的脚踏板分配的制作方法
用于机器人手术系统的脚踏板分配
背景技术:
1.机器人手术系统已用于微创医疗手术。在这种医疗手术期间,机器人手术系统由与用户界面介接的外科医生控制。用户界面允许外科医生操纵作用于患者的手术器械。用户界面包含手柄或万向架,所述手柄或万向架可由外科医生移动以控制机器人系统。在某些情况下,用户界面的输入控制与手柄中的一个相关联的手术器械的功能,例如夹紧钳口、击发紧固件、击发刀、传递电手术能量等。输入可以是脚踏板、触发器、按钮或其它合适的输入。
2.在医疗过程中,可将手术器械分配到指定或选定的脚踏板,使得所分配的脚踏板的致动来致动特定的手术器械。通常,脚踏板固定地分配到由相应的输入手柄操作的手术器械,或由临床医生手动分配。
3.持续需要改进脚踏板的分配、安全措施和控制具有机器人手术系统的手术器械的输入。
技术实现要素:
4.在本公开的一方面中,一种将机器人手术系统的脚踏板自动分配到所述机器人手术系统的手术机器人的手术器械的方法包含:接收第一电手术踏板被致动的信号;响应于所述第一电手术脚踏板的致动,确定连接到所述手术机器人的电手术器械的数量;在所述第一电手术脚踏板被致动之后,将所述第一电手术脚踏板分配到连接到所述手术机器人的第一电手术器械;以及在将所述第一电手术脚踏板分配到所述第一电手术器械之后,响应于所述第一电手术脚踏板的致动而将电手术能量传递到所述第一电手术器械。
5.在各方面中,所述方法包含:将连接到手术机器人的手术器械识别为紧固件施用手术器械;将紧固件脚踏板自动分配到所述紧固件施用手术器械;以及响应于所述紧固件脚踏板的每一致动而产生紧固件击发命令,使得针对所述紧固件脚踏板的每一致动从所述紧固件施用手术器械击发紧固件。
6.在某些方面,手术机器人的发生器确定所述电手术器械的数量,分配第一电手术脚踏板和/或将电手术能量传递到第一电手术器械。确定电手术器械的数量可包含确定单个电手术器械连接到手术机器人,且分配第一电手术脚踏板可包含响应于确定所述单个电手术器械连接到所述手术机器人而将所述第一电手术脚踏板自动分配到第一电手术器械。
7.在某些方面,确定电手术器械的数量包含确定第一电手术器械和第二电手术器械连接到手术机器人。方法可包含响应于第一电手术脚踏板的致动,为与机器人手术系统介接的临床医生产生第一提示以选择第一或第二电手术器械中的一个以分配到所述第一电手术脚踏板。所述方法可包含从临床医生接收第一电手术器械的选择,且响应于接收到所述第一电手术器械的所述选择且在产生第一电手术击发命令之前将第一电手术脚踏板分配到所述第一电手术器械。
8.在特定方面,方法可包含响应于接收到第一电手术器械的选择,将第二电手术脚踏板分配到第二电手术器械。方法可包含接收第二电手术脚踏板被致动的信号,且在将所
述第二电手术脚踏板分配到第二电手术器械之后响应于所述第二电手术脚踏板的致动而将电手术能量传递到所述第二电手术器械。
9.在特定方面,方法包含确定电手术器械的数量,所述确定电手术器械的数量包含确定第三电手术器械连接到手术机器人。产生第一提示可包含允许临床医生选择第一、第二或第三电手术器械中的一个,且方法可包含:响应于从所述临床医生接收对所述第一电手术器械的所述选择,为与机器人手术系统介接的临床医生产生第二提示以选择所述第二或第三电手术器械中的一个以分配到第二电手术脚踏板。所述方法可包含从临床医生接收第二电手术器械的选择,且响应于接收到所述第二电手术器械的所述选择且在产生第一电手术击发命令之前将第二电手术脚踏板分配到所述第二电手术器械。
10.在某些方面,方法包含当向第一电手术器械传递电手术能量失败时重新产生第一提示。所述方法可包含在将电手术能量传递到第一电手术器械之前验证所述第一电手术器械的情况。验证第一电手术器械的情况可包含验证所述第一电手术器械检测到接地路径且电路与所述接地路径形成闭合回路。验证第一电手术器械的情况可包含验证所述第一电手术器械的电极之间的电路闭合、所述电极之间的阻抗在期望范围内且所述电极处于期望位置。验证第一电手术器械的情况可包含验证所述第一电手术器械的钳口部件处于夹紧位置。
11.在特定方面,方法包含响应于未能验证第一电手术器械的情况而从所述第一电手术器械解除第一电手术脚踏板,从而防止电手术能量传递到所述第一电手术器械。
12.在本公开的另一方面中,机器人手术系统包含手术机器人、用户控制台、处理单元和电手术发生器。手术机器人包含第一电手术器械和第二电手术器械。用户控制台包含第一脚踏板和第二脚踏板。处理单元被配置成从用户控制台接收用户命令并响应于所述用户命令而控制手术机器人。电手术发生器与第一和第二电手术器械电连通,且所述电手术发生器被配置成响应于第一脚踏板的致动而将所述第一或第二电手术器械中的一个分配到所述第一脚踏板,和/或响应于所述第一脚踏板的致动而将电手术能量传递到所述第一或第二电手术器械中所分配的一个。
13.在各方面中,手术机器人可包含支撑第一电手术器械的臂,且电手术发生器可位于所述臂上。电手术发生器可被配置成响应于第二脚踏板的致动而将电手术能量传递到第一或第二电手术器械中的另一个。
14.在一些方面,电手术发生器可被配置成在未分配第一脚踏板时响应于所述第一脚踏板的致动而在用户控制台上产生提示。手术机器人可包含紧固件施用手术器械,且用户控制台可包含第三脚踏板。处理单元可被配置成响应于第三脚踏板的致动而将所述第三脚踏板分配到紧固件施用手术器械,使得所述紧固件施用手术器械响应于所述第三脚踏板的每一致动而击发紧固件。
15.下文参考附图更详细地描述本公开的示例性实施例的其它细节和方面。
附图说明
16.下文参考图式描述本公开的各个方面,所述图式并入本说明书中且构成本说明书的一部分,其中:
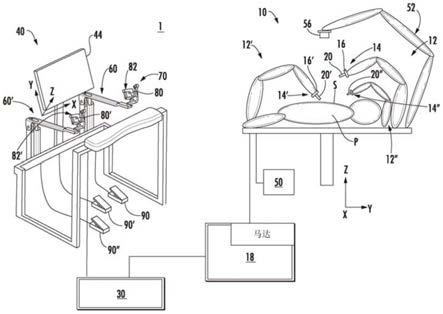
17.图1是根据本公开的用户界面和机器人系统的示意性图解;以及
18.图2是示出将脚踏板自动分配到图1的机器人系统的手术器械的方法的流程图。
具体实施方式
19.现在参考附图详细描述本公开的实施例,其中在几个视图的每个中,相同的附图标记表示相同或相应的元件。如本文所用,术语“临床医生”是指医生、护士或任何其它医护人员且可包含辅助人员。在整个说明书中,术语“近侧”是指装置或其组件中最靠近临床医生或距患者最远的部分,且术语“远侧”是指装置或其组件中距临床医生最远或最靠近临床医生的部分。
20.本公开大体上涉及用于将脚踏板自动分配到机器人手术系统的手术器械的方法和控制系统。方法包含将用户界面的脚踏板指定为紧固件施用脚踏板,使得当所述紧固件施用手术器械连接到机器人手术系统的手术机器人的臂时,紧固件施用脚踏板被自动分配到紧固件施用手术器械。当紧固件施用脚踏板被分配到紧固件施用手术器械时,紧固件施用脚踏板的致动使紧固件从紧固件施用手术器械击发。另外,方法包含将用户界面的脚踏板指定为第一电手术脚踏板和/或第二电手术脚踏板,且将所述第一和/或第二电手术脚踏板分配到连接到手术机器人的臂的电手术器械。当第一或第二电手术脚踏板中的一个被致动时,第一和第二电手术脚踏板中的一个或两个的分配可以是自动的。
21.参考图1,机器人手术系统1通常展示为手术机器人10、处理单元30和用户界面40。手术机器人10通常包含连杆12、12
′
、12
″
和机器人底座18。连杆12、12
′
、12
″
可移动地支撑不被配置成作用于组织的手术器械或工具20、20
′
、20
″
。连杆12、12
′
、12
″
可呈臂的形式,所述臂各自具有末端14,所述末端支撑被配置成作用于组织的手术器械或工具20、20
′
、20
″
。当手术器械20、20
′
、20
″
中的一或多个是例如单极、双极或ligasure
tm
器械的电手术器械时,手术机器人10可包含被配置成将电手术能量提供到手术器械20、20
′
、20
″
的电手术发生器50。电手术发生器50可集成到手术机器人10的连杆12、12
′
、12
″
中的一个中。另外,连杆12、12
′
、12
″
的末端14可包含用于使手术部位“s”成像的成像装置16。连杆12、12
′
、12
″
的末端14可包含工具检测系统,所述工具检测系统识别支撑或附接到连杆12、12
′
、12
″
的末端14、14
′
、14
″
的手术器械的类型。用户界面40通过处理单元30与机器人底座18连通。
22.用户界面40包含显示装置44,其被配置来显示手术部位“s”的图像,所述图像可以包含由定位在连杆12、12
′
、12
″
的末端14上的成像装置16捕获的数据和/或包含由围绕手术室定位的成像装置(例如,定位在手术部位“s”内的成像装置、邻近患者“p”定位的成像装置、定位在成像臂52的远端处的成像装置56)捕获的数据。成像装置(例如,成像装置16、56)可以捕获视觉图像、红外图像、超声图像、x射线图像、热图像和/或手术部位“s”的任何其它已知的实时图像。成像装置将捕获的成像数据传输到处理单元30,所述处理单元根据成像数据实时地创建手术部位“s”的图像(例如三维图像)并且将图像传输到显示装置44以供显示。
23.用户界面40还包含附接到万向架70的支撑输入手柄80、80
′
的控制臂60、60
′
,所述输入手柄允许临床医生操控机器人系统10(例如,移动连杆12、12
′
、12
″
,连杆12、12
′
、12
″
的末端14和/或手术器械20、20
′
、20
″
)。万向架70中的每一个与处理单元30连通以将控制信号传输到所述处理单元并且从所述处理单元接收反馈信号。另外或替代地,输入手柄80、80
′
中的每一个可包含控制界面,所述控制界面允许外科医生致动(例如,夹紧、抓握、击发、打
开、闭合、旋转、推进、切开等)支撑在连杆12、12
′
、12
″
的末端14处的手术器械20、20
′
、20
″
。用户界面40进一步包含脚踏板90、90
′
、90
″
,所述脚踏板可与输入手柄80、80
′
中的一个或两个一起使用以激活手术器械20、20
′
、20
″
的功能。
24.万向架70中的每一个为可移动的,以在手术部位“s”内移动连杆12、12
′
、12
″
的末端14。将显示装置44上的三维图像定向成使得万向架70的移动使连杆12、12
′
、12
″
的末端14如在显示装置44上观察到的那样移动。应了解,显示装置44上的三维图像的定向可相对于患者“p”的俯视图镜像或旋转。另外,将了解,显示装置44上的三维图像的大小可缩放成比手术部位“s”的实际结构更大或更小,从而允许外科医生更好地观看手术部位“s”内的结构。当万向架70移动时,手术器械20、20
′
、20
″
在手术部位“s”内移动。手术器械20、20
′
、20
″
的移动还可以包含支撑手术器械20、20
′
、20
″
的末端14的连杆12、12
′
、12
″
的移动。
25.关于机器人手术系统1的构造和操作的详细论述,可参考第8,828,023号美国专利,所述专利的全部内容以引入的方式并入本文中。
26.脚踏板90、90
′
、90
″
可用于控制手术器械20、20
′
、20
″
中的一或多个的致动或击发。手术器械20、20
′
、20
″
中的每一个可以是紧固件施用手术器械且被配置成将紧固件施用到组织,例如钉合器或夹具施用器,或可以是电手术器械且被配置成将电手术能量传递到组织,例如单极、双极、光学或其它电热血管闭合(例如,美敦力(medtronic)公司的ligasure
tm
)电手术器械。为了击发手术器械20、20
′
、20
″
需要将脚踏板90、90
′
、90
″
中的一个分配到手术器械20、20
′
、20
″
中的相应一个,以响应于所分配的脚踏板的致动而控制相应手术器械20、20
′
、20
″
的击发。用户控制台40可包含多排脚踏板,使得最上面一排脚踏板(未明确地展示)可控制相应手术器械的第一模式,且最下面一排脚踏板可控制相应手术器械的第二模式。例如,最上面一排脚踏板可在例如单极电烙器的第一模式下控制手术器械,而最下面一排脚踏板可在例如双极电烙器的第二模式下控制手术器械。
27.分配脚踏板90、90
′
、90
″
的先前解决方案已包含在医疗过程之前在显示器44上的用户界面内手动分配脚踏板90、90
′
、90
″
、利用输入手柄80、80
′
的控制以分配脚踏板90、90
′
、90
″
和/或包含用于每一手术器械的单独的脚踏板。这些分配脚踏板的解决方案的实例在各自于2018年5月17日提交的国际专利申请pct/us2018/033080、pct/us2018/033084和pct/us2018/033097中公开。这些申请中的每一个的全部内容以引用的方式并入本文中。
28.参考图2,根据本公开,参考图1的机器人手术系统,公开了将脚踏板90、90
′
、90
″
自动分配到手术器械20、20
′
、20
″
的方法100。最初,脚踏板90、90
′
、90
″
中的一个可被指定为紧固件脚踏板,例如脚踏板90
″
,而另两个脚踏板可被指定为电手术脚踏板,例如脚踏板90、90
′
。另外,一或多个手术器械20、20
′
、20
″
联接或连接到连杆12、12
′
、12
″
。当手术器械20、20
′
、20
″
连接到连杆12、12
′
、12
″
时,手术机器人10和/或处理单元30询问或识别手术器械20、20
′
、20
″
中的每一个的类型,例如电手术、紧固件施用或非击发(步骤102)。
29.例如,如果所连接的手术器械20
″
是紧固件施用手术器械,例如钉合器或夹具施用器,则处理单元30将紧固件施用手术器械20
″
分配到紧固件脚踏板90
″
(步骤104)。当紧固件施用手术器械20
″
被分配到紧固件脚踏板90
″
时,紧固件击发命令从处理单元30发送到手术机器人10,以在紧固件脚踏板90
″
被致动时(步骤106)击发紧固件施用手术器械20
″
。响应于紧固件击发命令,击发紧固件施用手术器械20
″
(步骤109)。在一些实施例中,方法100包含手术机器人10和/或处理器单元30在发送紧固件击发命令和/或击发紧固件施用手术器械
20
″
之前验证紧固件施用手术器械20
″
的配置,例如手术器械的钳口处于闭合或夹紧位置(步骤108)。
30.如果所连接的手术器械是电手术器械,例如手术器械20、20
′
,那么处理单元30将电手术器械20、20
′
分配到电手术发生器50以将手术器械分配到电手术脚踏板90、90
′
中的一个(步骤120)。在医疗过程期间,当电手术脚踏板中的第一个,例如脚踏板90被致动时(步骤122),电手术击发命令被发送到电手术发生器50(步骤124)。响应于电手术击发命令,电手术发生器50确定连接到手术机器人10的电手术器械的数量(步骤130)。电手术发生器50可通过询问手术机器人10来确定手术器械的数量和类型。另外或替代地,电手术发生器50可包含rfid识别系统,可包含在每个手术器械被连接时对其进行扫描的条形码扫描器,和/或可利用一或多个摄像头,例如摄像头56以识别手术器械。
31.当单个电手术器械(例如,手术器械20)被连接到手术机器人10时,电手术发生器50将电手术器械20分配到电手术脚踏板90(步骤140),并响应于电手术脚踏板90的每一致动而将电手术能量传递到电手术器械20(步骤142)。电手术发生器50可随着电手术脚踏板90的第一次致动和电手术脚踏板90的每一后续致动传递电手术能量(步骤144)。替代地,电手术发生器50可将电手术器械20分配到电手术脚踏板90的第一次致动,且随着电手术脚踏板90的每一后续致动传递电手术能量。电手术脚踏板90保持分配有电手术器械20,直至连接到手术机器人10的手术器械改变(步骤180)或直至电手术器械20未能响应于电手术脚踏板90的致动而击发(步骤136)。
32.在将电手术能量传递到所分配的电手术器械20之前,发生器50可验证电手术器械20的一或多个情况(步骤132)。电手术器械20的情况可取决于电手术器械20的类型。具体地说,当电手术器械20是单极器械时,发生器50可在将电手术能量传递到单极器械之前验证检测到接地路径且电路与接地路径形成闭合回路。当电手术器械20是双极器械时,发生器50可在将电手术能量传递到双极器械之前验证电极之间的电路闭合、电极之间的阻抗在期望范围内和/或双极器械的电极处于期望位置,例如钳口部件处于闭合或夹紧位置。当电手术器械20是电热血管闭合器械时,发生器50可在将电手术能量传递到电热血管闭合器械之前验证电热血管闭合器械的钳口部件处于期望位置,例如闭合或夹紧位置。另外,在将电手术能量传递到电手术器械20之前,发生器50和/或手术机器人10可验证电手术器械20的插入深度。
33.当例如手术器械20的第一电手术器械和例如手术器械20
′
的第二电手术器械连接到手术机器人10时,第一电手术脚踏板90的致动在显示器44上产生提示,以供临床医生选择例如手术器械20、20
′
的电手术器械,以分配到第一电手术脚踏板90(步骤152)。提示可由处理单元30或发生器50产生。临床医生利用用户界面20来选择将第一或第二电手术器械20、20
′
中的哪一个分配到第一电手术脚踏板90(步骤154)。为了选择将第一或第二电手术器械20、20
′
中的哪一个分配到第一电手术脚踏板90,临床医生可拉动与对应电手术器械20、20
′
相关联的输入手柄,例如输入手柄80的触发器,或临床医生可通过与显示器44的图形用户界面介接,例如触摸显示器44或使用控制器选择显示器44上的项目来选择显示器44上的第一或第二电手术器械20、20
′
。当第一电手术脚踏板90被分配到第一或第二电手术器械20、20
′
时,电手术发生器50响应于第一电手术脚踏板90的每一致动而将电手术能量传递到所分配的第一或第二电手术器械20、20
′
(步骤158)。
34.在将第一电手术踏板90分配到第一或第二电手术器械20、20
′
中的一个之后,发生器50将第一或第二电手术器械20、20
′
中的另一个自动分配到第二电手术踏板90
′
(步骤156)。当第二电手术脚踏板90
′
被致动时,发生器50将电手术能量传递到第一或第二电手术器械20、20
′
中的另一个(步骤159)。
35.在将电手术能量传递到第一或第二电手术器械20、20
′
之前,发生器50可在每一电手术能量传递之前执行如上文所详述的检验(步骤132)。此外,第一和第二电手术脚踏板90、90
′
保持分配,直至连接到手术机器人10的手术器械改变(步骤180)或直至电手术器械20、20
′
中的一个未能响应于电手术脚踏板90的致动而击发(步骤136)。另外,在医疗过程期间,如果临床医生想要手动地将第一和第二电手术脚踏板90、90
′
重新分配到不同的手术器械,那么临床医生可双击第一和第二电手术脚踏板90、90
′
中的任一个,以在显示器44上重新打开如上文所详述的提示(步骤160)。如上文所详述,提示显示在显示器44上;然而,提示可显示在包含但不限于抬头显示器(未示出)的不同的显示器上。
36.当例如手术器械20的第一电手术器械和例如手术器械20
′
的第二电手术器械以及例如手术器械20
″
的第三电手术器械连接到手术机器人10时,第一电手术脚踏板90的致动在显示器44上产生第一提示,以供临床医生选择例如手术器械20、20
′
、20
″
的电手术器械,以分配到第一电手术脚踏板90(步骤162)。第一提示可由处理单元30或发生器50产生。临床医生利用用户界面20来选择第一、第二或第三电手术器械20、20
′
、20
″
中的哪一个以分配到第一电手术脚踏板90(步骤164)。为了选择将第一、第二或第三电手术器械20、20
′
、20
″
中的哪一个分配到第一电手术脚踏板90,临床医生可拉动与对应电手术器械20、20
′
、20
″
相关联的输入手柄,例如输入手柄80的触发器,或临床医生可通过与显示器44的图形用户界面介接,例如触摸显示器44或使用控制器选择显示器44上的项目来选择显示器44上的第一、第二或第三电手术器械20、20
′
、20
″
。当第一电手术脚踏板90被分配到第一、第二或第三电手术器械20、20
′
、20
″
中的一个时,电手术发生器50响应于第一电手术脚踏板90的每一致动而将电手术能量传递到所分配的第一、第二或第三电手术器械20、20
′
、20
″
(步骤166)。
37.在将第一电手术踏板90分配到第一、第二或第三电手术器械20、20
′
、20
″
中的一个之后,处理单元30或发生器50在显示器44上产生第二提示,以供临床医生选择将第一、第二或第三电手术器械20、20
′
、20
″
中的其它中的哪一个分配到第二电手术踏板90
′
(步骤168)。为了选择将第一、第二或第三电手术器械20、20
′
、20
″
中的哪一个分配到第二电手术脚踏板90
′
,临床医生可拉动与对应电手术器械20、20
′
、20
″
相关联的输入手柄,例如输入手柄80的触发器,或临床医生可通过与显示器44的图形用户界面介接来选择显示器44上的第一、第二或第三电手术器械20、20
′
、20
″
。当第二电手术脚踏板90
′
分配有第一、第二或第三电手术器械20、20
′
、20
″
中的另一个时,电手术发生器50响应于第二电手术脚踏板90
′
的每一致动而将电手术能量传递到所分配的第一、第二或第三电手术器械20、20
′
、20
″
(步骤169)。
38.在将电手术能量传递到第一、第二或第三电手术器械20、20
′
、20
″
之前,发生器50可执行如上文所详述的检验(步骤132)。第一和第二电手术脚踏板90、90
′
保持分配,直至连接到手术机器人10的手术器械改变(步骤180)或直至所分配的第一、第二或第三电手术器械20、20
′
、20
″
未能响应于相应电手术脚踏板90、90
′
的致动而击发(步骤136)。另外,在医疗过程期间,如果临床医生想要手动地将第一和第二电手术脚踏板90、90
′
重新分配到不同的手术器械,那么临床医生可双击第一和第二电手术脚踏板90、90
′
中的任一个,以在显示器
44上重新打开如上文所详述的提示(步骤160)。如上文所详述,提示显示在显示器44上;然而,提示可显示在包含但不限于抬头显示器(未示出)的不同的显示器上。
39.虽然已在图式中展示本公开的若干实施例,但并不意图将本公开限于这些实施例,而期望使本公开与本领域所允许的范围一样广泛,并且应以同样的方式阅读本说明书。还设想以上实施例的任何组合,并且所述组合在所附权利要求书的范围内。因此,以上描述不应解释为限制性的,而仅仅是作为特定实施例的例证。本领域技术人员将设想在所附权利要求的范围内的其他修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1