一种颈椎病康复治疗器的制作方法
1.本发明涉及一种康复治疗器材,尤其是涉及一种颈椎病康复治疗器。
背景技术:
2.颈椎病是由于颈椎间盘退行性病变及骨质增生所引起的一系列临床症状,属于脊椎病的一种。职业的原因或生活习惯是引发颈椎病的主要原因。通常理论颈椎病治疗的原则是使颈椎恢复原有正常的生理曲度。减少头部对颈椎的压力是常采用的方式之一,目前通常的具体做法是:1、通过牵引带套住下颚和后颈手动拉伸牵引带牵引;2、目前市场上有一种电动牵引椅采用的是电动推杆驱动牵引带升降;3、还有一种颈椎固定器,后颈部有可通过打气筒或橡胶加压球充气的气囊,前部是托住前颌的可调支架。不难发现这三类颈椎牵引器材从取材到结构设计上都无可挑剔并被广大受众接受,但治疗和预防效果很不理想,发明人查阅多种资料得出一个结论认为对于颈椎病的预防和治疗,加强颈椎及颈部组织的锻炼使颈部各组成维持协调和平衡是最为行之有效的手段,经过一年多的多例实验验证证明这个结论是正确的,目前涉及颈椎病治疗的工作者还没有意识到这一点,显然上述目前通常采用的做法是有欠缺的,牵引只是起到了减轻头部对颈椎的压力和强制拉伸椎间关节的作用,恰当力度和角度的牵引能临时解除症状,不恰当的牵引起不到作用甚至会有反作用。再则目前传统颈椎牵引椅或牵引床在后颈部没有颈部托,而处于悬空状态,牵引最多只能促使颈椎曲度由反弓变直,而不能把颈椎曲度由直变成正常,前述的颈椎固定器后颈部有气囊,依靠气囊修复或保持颈椎生理曲度从力学角度分析显然力度是不够的,几乎起不到保护或矫正颈椎生理曲度的作用。
技术实现要素:
3.本发明的目的在于解决上述技术存在的不足提供一种颈椎病康复治疗器,通过对颈椎及颈部组织或器官的科学锻炼达到增强颈部肌筋腱韧性,防治颈椎间盘突出,维持颈椎肌筋腱生物力学平衡,刺激纤维环自我修复和再生,最终起到对颈椎病预防康复治疗目的。
4.为了实现上述目的,本发明提供了如下方案:一种颈椎病康复治疗器,其特征在于,包括固定架、测力传感器、电机、卷轮、卷材、头部托、颈部托及控制器,所述卷轮与所述电机传动连接,所述卷材第一端绕于所述卷轮,所述卷材第二端与所述头部托接合连接,所述电机、所述卷轮、所述卷材及所述头部托组成动力模块,所述动力模块对测力传感器施力连接,所述测力传感器与所述固定架固定连接,所述测力传感器及所述电机与所述控制器电性连接,所述颈部托与固定架可相对移动连接,在使用时所述颈部托托住后颈部。
5.进一步的,所述测力传感器为称重传感器。
6.进一步的,所述卷材为绳。
7.进一步的,所述卷材为带。
8.进一步的,所述电机为减速电机。
9.进一步的,所述减速电机为蜗轮蜗杆减速电机。
10.本发明的设计思路是:控制器根据测力传感器反馈及内置程序对电机实时智能控制,电机驱动卷轮带动头部托按预设行程运动、按预设力运动、按预设时间运动,增速或减速运动、升降、往复运动、反复运动等,从而得到智能控制的对颈椎及颈部组织如韧带、肌肉、神经等组织及器官如血管锻炼的运动。本技术方案与现有颈椎病器械采用的技术相比有重大进步:1、改原技术单次维持力度牵引为牵引力度由无到有再从有到无往复循环,活络了颈周各组织,使颈部各组织处于“流水不腐”状态,2、增加了可移动的颈部托能适应各种体型及使用时姿势,在使用时使颈部托始终能托住后颈部,在头部托对头部产生一个拉力时在颈部托产生的分力的反作用力作用于后颈部,该作用力使正常的颈椎曲度保持,使反弓或变直的颈椎曲度恢复正常。合适的往复循环牵引加上颈部托的作用使颈部达到“骨正筋柔,气血自流”之目的。本发明是三个特征的组合:1、普通牵引;2、颈部托;3、智能控制器,缺少智能控制器(控制复杂的运动)及颈部托(帮助恢复颈椎曲度),效果将大打折扣。
11.本发明的有益效果是:能对颈部实现有节奏的、被规划的、力度可调的、时间可控的锻炼,可有效的、科学的、个性化的锻炼颈椎及颈部组织如韧带、肌肉、神经等组织及器官如血管的功能,实现对颈椎病康复治疗的目的,本发明可设置手动控制电机正反转从而具有普通脊椎牵引设备功能。
12.头部托在本发明中应理解为能拖住头部的或能连结头部的任意形式的支撑物。
13.颈部托在本发明中应理解为能托住颈部的任意支撑物。
附图说明
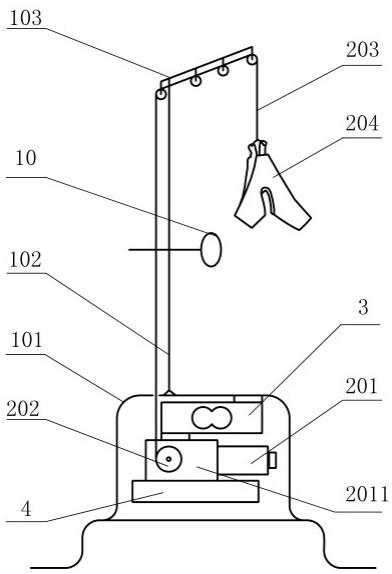
14.附图1为实施例1主要结构示意图;附图2为实施例1使用过程示意图;附图3为实施例1除头部托外动力模块第一方向结构示意图;附图4为实施例1除头部托外动力模块第二方向结构示意图;附图5为实施例2主要结构示意图。
15.图中:101、1011、方凳架;102、立杆;103、吊杆;201、减速电机;2011、减速箱;202、卷轮;203、织带; 204、头部托;3、称重传感器;4、控制器;501、502、行程开关;503、行程开关拨快;6、刚性连接件;7、卷轮安装轴;8、螺纹输出轴;9、控制器安装板;10、颈部托;11、导向轮;12、吊箱。
具体实施方式
16.实施例1:参见附图1,本实施例包括方凳架101、立杆102及吊杆103共同组成技术方案中所述的固定架,还包括称重传感器3、减速电机201、卷轮202、织带203、头部托204组成的动力模块,卷轮202与减速电机201的卷轮安装轴同轴固定连接,织带203第一端绕于卷轮202,织带203第二端与头部托204连接在一起,动力模块经由刚性连接件6与称重传感器3固定连接,称重传感器3按应用要求与固定架的方凳架101内部固定连接,头部托204受力时力传给称重传感器3,控制器4为由单片机为控制核心的智能控制器,控制器4对减速电机201正反转、转速、启停时间等等进行智能控制,称重传感器3通过柔性电线与控制器4连接并为控制器4提
供动力模块受作用力数据,其中,称重传感器3为技术方案中所述的测力传感器,减速电机201为技术方案中所述的电机,减速箱2011是减速电机201的组成,织带203为技术方案中所述的卷材,参见附图2,通过调整可移动连接在立杆102上的颈部托10使颈部托10能适应不同人不同坐姿时的后颈部。
17.所述颈部托10在本实施例中是一种棉类物质充填的圆形枕,在受力时能随后颈部不同变形且能承受很大的力度。颈部托10还可以是水填充枕其塑型性更好,也可以是仿形托或是进一步的针对性成型的仿形托。对颈部托10的设计和选用以尽可能符合或逐渐符合颈椎正常生理曲度为原则,具体选材和形状在理解本发明技术原理基础上可任意发挥。
18.所述头部托204在本实施例中选用的是常用的颈椎牵引带。
19.参见附图2,人颈部以下身体可以认为是相对不动的并且靠紧立杆102,头部托204对头部有牵引力时,后颈部对颈部托10产生一个横向作用力分力,这个分力的反作用力使得颈椎曲度由反弓逐渐变为正常。根据各个人不同的身体特征调节颈部托10横向伸出立杆102的幅度及导向轮11高低位置使得牵引有助于保持或恢复颈椎正常生理曲度的方向牵引。导向轮11的设置不是必须的,其作用也可以通过调整人体前后就做的座位置或通过调整织带203在吊杆上的下垂位置实现。
20.减速电机201为涡轮蜗杆电机,这种减速电机的使用使得头部托204可以控制简单的停止在行程内任一位置。
21.参见附图1,平常情况,固定架平放于平台,织带203途径立杆102及吊杆103并经轮轴支撑伸出吊杆103,与织带203连接的头部托204垂向地面。
22.参见附图3、4,减速电机201有同轴的两个输出轴,即卷轮安装轴7和螺纹输出轴8,卷轮安装轴7连接有卷轮202,而螺纹输出轴8上有带螺纹的行程开关拨快503,当减速电机201正反转动时,行程开关拨快503随减速电机201螺纹输出轴8的转动正反向移动,在设定的上行程(指头部托204远离身体方向的行程,在本实施例中是指远离地面的行程)极限与下行程(与上述上行程相反)极限行程开关拨快503推动行程开关501及502动作,从而实现对头部托204最大及最小行程的控制,该行程控制系统可防止减速电机201超限卷取或释放织带203而得以保证本发明稳定可靠运行,工作中上下行程极限中间的上行程控制根据称重传感器3反馈并由使用者设定,称重传感器3的反馈的数据达到设定时也即为达到上行程,工作中上下行程极限中间的下行程控制根据控制器4对时间计时实现。为了防止行程开关拨快503相对于减速电机201螺纹输出轴8旋转,在控制器安装板9设置有导向的限位档孔。
23.参见附图3、4,减速电机201卷轮安装轴7一侧的减速箱2011箱壁安装的是刚性连接件6,减速电机201螺纹输出轴8一侧的减速箱2011箱壁安装的是控制器安装板9,控制器安装板9呈t字型,在其t字型顶部外侧面安装控制器4,在其t字型顶部内侧面安装行程开关501、502,行程开关501是上行程极限开关,行程开关502是下行程极限开关。
24.控制器4存储有智能控制程序,另外还有开关板(图中未示出)可对控制器4内的程序进行参数选择和设定。通过开关板选择和设定力度、速度、时间、行程,及科学的各时间段运行参数,这样,通过对颈椎及颈部组织或器官的科学锻炼达到增强颈部肌筋腱韧性,防治颈椎间盘突出,维持颈椎肌筋腱生物力学平衡,刺激纤维环自我修复和再生,最终起到对颈椎病预防康复治疗目的。
25.实施例2参见附图5,方凳架1011在下方,与实施例不同之处在于减速电机201、称重传感器3、控制器4等组件安装到了吊箱12内,并移到了上方与吊杆103可调位置的滑动连接,其它与实施例1相同,不再赘述。
26.通过两个实施例可以看出在实际应用中,固定架还可以是其它在理解本发明目的基础上的任意形状,在本技术领域的技术人员无需创造性的劳动就能实现,改变形状后固定架可以安装于建筑物天花板、房间墙壁、可移动支撑物侧壁、可移动支撑物顶梁或者床头等。
27.在本技术领域公知的,结构稍微改动,称重传感器3还可以换做拉压力传感器,在这里不再赘述。
28.减速电机201还可以是任意形式的其它电机在这里不用赘述,本领域技术人员在理解本发明构思的基础上会毫无困难的根据具体情况选择不同电机;卷轮202还可以通过传动带或传动链等与电机传动连接。
29.织带203是一种带材,也可以用绳类材料如编织绳、钢丝绳等替代。
30.所述的开关板还可以是无线遥控器,出于可靠方面的考虑优选还是有线控制。
31.下面以一个运行实例(自动)对本发明使用过程进行说明:首先,通电开机,使用本实施例所述开关板设定控制器4各运行参数,按确定键头部托204下行到凭视觉感觉到合适的高度,戴好头部托204,按运行键头部托204按预设速度v1上行,到达牵引力度f1时,头部托204按预设速度v2(一般选用v2小于或等于v1)上行,到达预设牵引力度f2(使用者需要的牵引力度)时头部托204停止上行,停留预设的时间t1,然后头部托204按预设速度v3下行,到达预设行程l1时停留0~n秒时间头部托204再次按预设速度v1上行,如此往复,运行过程中根据感受对预设参数实时调整以达到最佳治疗效果或达到最佳舒服程度,按下停止键并摘下头部托204后再按下关机键,头部托204上行直到上行程开关501动作这时头部托204升高到合适的高度。预设的各阶段运行程序可以进一步细分或提供多程序供使用选择。
32.下面以另一个运行实例(手动)对本发明使用过程进行说明:首先,通电开机,按住不松开所述开关板上手动上升键,减速电机201转动,头部托204上行,松开所述开关板上手动上升键,减速电机201停止转动;按住不松开所述开关板上手动下降键,减速电机201转动,头部托204下行,松开所述开关板上手动下降键,减速电机201停止转动。
33.称重传感器3或拉压力传感器为技术方案中测力传感器,但所述测力传感器不仅限于这两种,也可以是其它形式的测力传感器,如弹性原件与测距传感器或接近开关等组成的测力传感器等。
34.本发明不仅可以作为颈椎病康复治疗器,而且还可以作为脊椎治疗康复器、上下肢疾病治疗康复器使用,原理同颈椎病康复治疗器,作为上下肢疾病治疗康复器使用时可以用手拉住头部托204或把下肢固定于头部托204,使用时还可以取掉头部托204而选用其它便于与身体部位相契合的物件,如把头部托204换做两个可以置于腋下套环用于作为脊椎治疗康复器,还可以在织带203的头部托204端吊挂重物对身体一上一下的按压等。
35.以上仅是对本发明优选实施方式进行了描述,但并不将本发明技术方案限制于此,本领域技术人员在本发明主要技术构思基础上所做的任何公知变形或放大或微缩版都属于本发明保护的技术范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1