一种应用于手术机器人的超声刀的制作方法
[0001]
本发明涉及医疗器械技术领域,具体而言,涉及一种应用于手术机器人的超声刀。
背景技术:
[0002]
超声刀是兼具切割和闭合功能的有源手术器械,可以有效地用于许多疾病的治疗。超声刀的原理是利用超声波换能器产生振动,发出超声波沿着切割刀杆的纵向轴线传播,然后在刀杆上沿轴线产生放大的驻波,最后在刀头端部产生高速纵向机械运动,刀头末端的机械振动在切割有机组织时非常有效,并且由超声频率产生的热可以凝结组织,闭合血管。这种器械由于刀杆通过套管可以易于到达手术部位,特别适用于微创手术,如内窥镜或腹腔镜手术。
[0003]
手术机器人是集多项现代高科技手段于一体的综合体,其用途广泛,在临床上外科上有大量的应用。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的革命性外科手术工具,将超声刀嵌入式地搭载在手术机器人上,成为微创手术发展的必然趋势。
[0004]
目前,超声刀均为手持式枪式结构,其内部配置有换能器和刀头,其外部需要外接超声发生器,外接线体会妨碍手术操作,从而给手术操作增加一定的风险,由于超声刀复杂的枪式结构,很难快速稳定地安装到机器人上,适配性差,且无菌处理困难,另外,超声刀刀头和换能器之间依靠手动拧紧,有以下缺点:一是在同时处理有菌无菌部件时需要繁琐操作,容易引起污染,二是为了控制转矩,一般用机械转矩控制扳手或内嵌棘齿机构等控制拧紧程度,控制方法粗糙,直接影响使用中超声刀振动传递效果。
技术实现要素:
[0005]
鉴于此,本发明提供了一种应用于手术机器人的超声刀,其解决了现有技术中,超声刀需要外接线影响手术操作、超声刀复杂的结构很难适配到手术机器人上、超声刀的手动装配容易造成超声刀的污染和扭力失效的问题。
[0006]
为此,本发明提供了一种应用于手术机器人的超声刀,其包括
[0007]
刀壳、刀体、换能盒体、连接部件、刀头连接机构和锁紧机构;
[0008]
刀壳、刀体、刀头连接机构组装成一体,作为一次性无菌产品提供,换能盒体作为非一次性有菌产品提供;
[0009]
刀壳为无盖的壳体结构;
[0010]
刀体包括内刀管、外刀管、刀舌和刀杆,刀杆穿过刀壳并固定在刀壳的远端;
[0011]
刀头连接机构安装于刀体的近端,且刀头连接机构位于刀壳的内部;
[0012]
锁紧机构分设于连接部件和刀壳的外壁上;
[0013]
换能盒体内设置有换能器、导电连接、电池模组、电池电路和控制电路,导电连接的一端连接电池电路和控制电路,且导电连接的另一端连接换能器;
[0014]
当手术安装时:
[0015]
刀头连接机构将刀壳、刀体、换能盒体连接为一体;
[0016]
换能盒体通过旋转刀体安装于刀壳内,换能器的变幅杆插接于刀体中的刀杆近端,且变幅杆与刀杆的近端以螺纹紧固方式连接;
[0017]
刀壳和连接部件之间设置有无菌垫片,无菌垫片的两侧分别设置有导电触片,两侧导电触片电性连接;
[0018]
连接部件卡接于刀壳的开口端上;
[0019]
锁紧机构卡接连接部件和刀壳。
[0020]
进一步地,上述刀头连接机构包括旋紧齿轮,旋紧齿轮卡接于刀壳的远端,且旋紧齿轮相对刀壳轴向固定且可周向旋转,旋紧齿轮固定内刀管和刀杆,同时,旋紧齿轮周向固定于外刀管,且旋紧齿轮可轴向相对外刀管运动,当手术安装时,旋紧齿轮旋转时带动刀体旋转,可将刀杆和变幅杆拧紧。
[0021]
进一步地,上述内刀管和外刀管依次套设于刀杆上,刀舌的上部通过铰链铰接于外刀管的一端部,且刀舌的下部连接内刀管,刀头连接机构还包括套管轴,套管轴固定连接外刀管。
[0022]
进一步地,上述刀头连接机构还包括套头,套头固定连接于套管轴近端,刀体穿过刀壳延伸至套管轴的内部,套管轴上设置有开合控制机构;
[0023]
开合控制机构包括位移齿轮、挡块和弹簧二,位移齿轮通过螺纹套设于套管轴上,位移齿轮轴向和旋紧齿轮耦合,并且位移齿轮和旋紧齿轮在轴向上无相对运动,位移齿轮周向可相对旋紧齿轮旋转,位移齿轮通过螺纹与套管轴连接,弹簧二套设于套管轴上,弹簧二位于位移齿轮和套头之间;
[0024]
位移齿轮旋转时带动套管轴轴向移动,进而拉动外刀管相对于内刀管轴向移动,控制刀舌的开合。
[0025]
进一步地,上述换能盒体包括驱动仓,驱动仓内设置有驱动机构,驱动机构包括转矩电机、输出齿轮、弹簧一和离合按钮,转矩电机滑动设于驱动仓的套筒内,输出齿轮固定连接于转矩电机的端部,弹簧一设于转矩电机和换能盒体外壳之间,离合按钮滑动于套筒内,离合按钮的一端固定连接转矩电机,且离合按钮的另一端可从换能盒体外推动,离合按钮可推动转矩电机和输出齿轮在驱动仓内轴向移动;
[0026]
离合按钮未按下时,输出齿轮和位移齿轮啮合,转矩电机可带动位移齿轮旋转,控制外刀管轴向移动,进一步控制刀舌开合;
[0027]
离合按钮按到底端时,输出齿轮和旋紧齿轮啮合,转矩电机可带动旋紧齿轮转动,进一步带动刀体旋转,当换能盒体插入刀壳时将刀杆和变幅杆远端拧紧。
[0028]
进一步地,上述转矩电机可控制输出扭矩不超过设定值。
[0029]
进一步地,上述驱动仓的内壁上设置有驱动开关,驱动开关位于驱动仓远端,当转矩电机和输出齿轮轴向移动到驱动仓底部时触发驱动开关,驱动转矩电机带动旋紧齿轮旋转。
[0030]
进一步地,上述换能盒体上面向连接部件的外壁上设置有多个接触头,接触头贴合导电触片,接触头和电池电路电性连接,连接部件上设置有电气接头,电气接头贴合导电触片,电气接头与控制电路电性连接。
[0031]
进一步地,上述换能盒体还包括控制仓,电池模组、电池电路和控制电路皆设于控
制仓内;电池电路、换能器和转矩电机皆与控制电路电性连接。
[0032]
进一步地,上述换能盒体内包括翘板式齿轮卡位,转矩电机远端还包括刚性连接销,驱动仓远端还包括翘板式卡板,当转矩电机和输出齿轮在驱动仓近端时,刚性连接销压动翘板式卡板,使翘板式卡板卡住旋紧齿轮防止其旋转;当转矩电机和输出齿轮在驱动仓远端时,刚性连接销压动翘板式卡板,使翘板式卡板卡住位移齿轮防止其旋转。
[0033]
本发明所提供的一种应用于手术机器人的超声刀中,采用将换能盒体插入刀壳内,连接部件通过锁紧机构与刀壳连接,刀壳内的刀头连接机构分别连接换能器和刀体,从而形成一个形状单一的嵌套式的超声刀,刀壳、刀体、刀头连接机构组装成一体,一次性无菌产品提供,换能盒体作为非一次性有菌产品提供;通过在控制仓内装有控制电路、电池电路和电池模组,使得超声刀嵌入式地搭载微型发生器和独立电源;当手术安装时,通过触发驱动机构的位移,实现刀头连接机构和刀体的自动拧紧;通过电气接头外接的控制端,控制驱动机构驱动开合控制机构工作,从而控制刀舌的打开和关闭。
[0034]
因此,本发明相较于现有技术具有以下有益效果:
[0035]
1)通过内嵌微型发生器和电池模组,使超声刀作为一个可独立作业的模块,使得有菌和无菌部件可以组合使用,避免了外接线体的干扰;
[0036]
2)通过模块化嵌套的结构设计,使得超声刀的结构单一化,更好地进行杀菌清理,且配置有专用的连接部件,从而更好地安装于手术机器人上,大大提高了超声刀的适配性;
[0037]
3)通过一键触发超声刀自动与刀体旋紧连接,智能化地控制刀体安装扭矩,不仅使得安装效果更佳稳固,而且减少了装配过程中手动触碰;
[0038]
4)通过预留有接入手术机器人的数据接口,使得超声刀和机器人实现一体化控制,可通过机器人端输入的信号实现对刀舌开合的控制,结构设计合理。
附图说明
[0039]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0040]
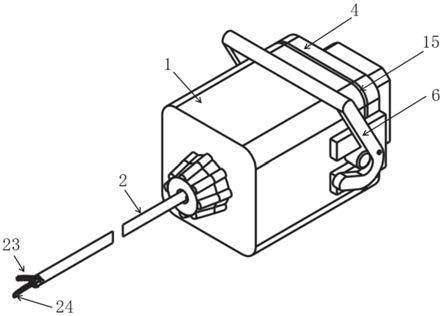
图1为本发明实施例提供的一种应用于手术机器人的超声刀的整体结构示意图;
[0041]
图2为本发明实施例提供的一种应用于手术机器人的超声刀的爆炸图;
[0042]
图3为本发明实施例提供的一种应用于手术机器人的超声刀中换能盒体的剖视图一;
[0043]
图4为本发明实施例提供的一种应用于手术机器人的超声刀中换能盒体的剖视图二;
[0044]
图5为本发明实施例提供的一种应用于手术机器人的超声刀中换能盒体的内部结构示意图;
[0045]
图6为本发明实施例提供的一种应用于手术机器人的超声刀中刀壳的内部结构示意图;
[0046]
图7为本发明实施例提供的一种应用于手术机器人的超声刀中刀体的剖视图;
[0047]
图8为本发明实施例提供的一种应用于手术机器人的超声刀中刀头连接机构的结构示意图;
[0048]
图9为本发明实施例提供的一种应用于手术机器人的超声刀中位移齿轮的结构示意图;
[0049]
图10为本发明实施例提供的一种应用于手术机器人的超声刀中翘板式齿轮卡位的结构示意图。
[0050]
其中,1-刀壳;2-刀体;21-外刀管;22-内刀管;23-刀舌;24-刀杆;3-换能盒体;32-控制仓;33-驱动仓;4-连接部件;5-刀头连接机构;51-旋紧齿轮;52-套管轴;53-套头;6-锁紧机构;7-换能器;8-变幅杆;10-导电连接;11-电池模组;12-电池电路;13-控制电路;14-驱动机构;141-转矩电机;142-输出齿轮;143-弹簧一;144-离合按钮;15-无菌垫片;16-导电触片;17-开合控制机构;171-位移齿轮;172-挡块;173-弹簧二;18-铰链;19-套筒;20-驱动开关;25-接触头;26-电气接头;28-翘板式齿轮卡位;29-刚性连接销;30-翘板式卡板。
具体实施方式
[0051]
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0052]
实施例一:
[0053]
参见图1至图10,本实施例提供了一种应用于手术机器人的超声刀,其中,包括刀壳1、刀体2、换能盒体3、连接部件4、刀头连接机构5和锁紧机构6;刀壳1、刀体2、刀头连接机构5组装成一体,作为一次性无菌产品提供,换能盒体3作为非一次性有菌产品提供;刀壳1为无盖的壳体结构;刀体2包括内刀管22、外刀管21、刀舌23和刀杆24,刀杆24穿过刀壳1并固定在刀壳1的远端;刀头连接机构5安装于刀体2的近端,且刀头连接机构5位于刀壳1的内部;锁紧机构6分设于连接部件4和刀壳1的外壁上;换能盒体3内设置有换能器7、导电连接10(可以为针或者软性连接部件)、电池模组11、电池电路12和控制电路13,导电连接10的一端连接电池电路12和控制电路13,且导电连接10的另一端连接换能器7;当手术安装时:刀头连接机构5将刀壳1、刀体2、换能盒体3连接为一体;换能盒体3通过旋转刀体2安装于刀壳1内,换能器7的变幅杆8插接于刀体2中的刀杆24近端,且变幅杆8与刀杆24的近端以螺纹紧固方式连接;刀壳1和连接部件4之间设置有无菌垫片15,无菌垫片15的两侧分别设置有导电触片16,两侧导电触片16电性连接;连接部件4卡接于刀壳1的开口端上;锁紧机构6卡接连接部件4和刀壳1。
[0054]
具体地,参见图1至图10,刀头连接机构5包括旋紧齿轮51,旋紧齿轮51卡接于刀壳1的远端,且旋紧齿轮51相对刀壳1轴向固定且可周向旋转,旋紧齿轮51固定内刀管22和刀杆24,同时,旋紧齿轮51周向固定于外刀管21,且旋紧齿轮51可轴向相对外刀管21运动,当手术安装时,旋紧齿轮51旋转时带动刀体2旋转,可将刀杆24和变幅杆8拧紧。
[0055]
具体地,参见图1至图10,内刀管22和外刀管21依次套设于刀杆24上,刀舌23的上部通过铰链18铰接于外刀管21的一端部,且刀舌23的下部连接内刀管22,刀头连接机构5还包括套管轴52,套管轴52固定连接外刀管21。
[0056]
本实施例所提供的一种应用于手术机器人的超声刀中,采用将换能盒体插入刀壳内,连接部件通过锁紧机构与刀壳连接,刀壳内的刀头连接机构分别连接换能器和刀体,从
而形成一个形状单一的嵌套式的超声刀,刀壳、刀体、刀头连接机构组装成一体,一次性无菌产品提供,换能盒体作为非一次性有菌产品提供;通过在控制仓内装有控制电路、电池电路和电池模组,使得超声刀嵌入式地搭载微型发生器和独立电源;当手术安装时,通过触发驱动机构的位移,实现刀头连接机构和刀体的自动拧紧;通过电气接头外接的控制端,控制驱动机构驱动开合控制机构工作,从而控制刀舌的打开和关闭。
[0057]
因此,本发明相较于现有技术具有以下有益效果:
[0058]
1)通过内嵌微型发生器和电池模组,使超声刀作为一个可独立作业的模块,使得有菌和无菌部件可以组合使用,避免了外接线体的干扰;
[0059]
2)通过模块化嵌套的结构设计,使得超声刀的结构单一化,更好地进行杀菌清理,且配置有专用的连接部件,从而更好地安装于手术机器人上,大大提高了超声刀的适配性;
[0060]
3)通过一键触发超声刀自动与刀体旋紧连接,智能化地控制刀体安装扭矩,不仅使得安装效果更佳稳固,而且减少了装配过程中手动触碰;
[0061]
4)通过预留有接入手术机器人的数据接口,使得超声刀和机器人实现一体化控制,可通过机器人端输入的信号实现对刀舌开合的控制,结构设计合理。
[0062]
实施例二:
[0063]
参见图1至图10,图中示出了本发明实施例二提供的一种应用于手术机器人的超声刀,本实施例在上述实施例的基础上还进一步地做出了以下作为改进的技术方案:刀头连接机构5还包括套头53,套头53固定连接于套管轴52近端,刀体2穿过刀壳1延伸至套管轴52的内部,套管轴52上设置有开合控制机构17;开合控制机构17包括位移齿轮171、挡块172和弹簧二173,位移齿轮171通过螺纹套设于套管轴52上,位移齿轮171轴向和旋紧齿轮51耦合,并且位移齿轮171和旋紧齿轮51在轴向上无相对运动,位移齿轮171周向可相对旋紧齿轮51旋转,位移齿轮171通过螺纹与套管轴52连接,弹簧二173套设于套管轴52上,弹簧二173位于位移齿轮171和套头53之间;位移齿轮171旋转时带动套管轴52轴向移动,进而拉动外刀管21相对于内刀管22轴向移动,控制刀舌23的开合。
[0064]
具体地,参见图1至图10,转矩电机141可控制输出扭矩不超过设定值。
[0065]
具体地,参见图1至图10,驱动仓33的内壁上设置有驱动开关20,驱动开关20位于驱动仓33远端,当转矩电机141和输出齿轮142轴向移动到驱动仓33底部时触发驱动开关20,驱动转矩电机141带动旋紧齿轮51旋转。
[0066]
当手术安装时,推动离合按钮144,转矩电机141沿着套筒19滑动,弹簧一143被压缩,输出齿轮142位移到旋紧齿轮51的下方并与旋紧齿轮51啮合,输出齿轮142触碰到驱动开关20,驱动开关20将信号反馈给控制电路13,控制电路13控制将预设的电机扭力值信号传送给电池电路12,电池电路12控制电池模组11给转矩电机141供电,转矩电机141转动带动输出齿轮142转动,输出齿轮142驱动旋紧齿轮51沿着周向转动,旋紧齿轮51螺纹连接内刀管22,旋紧齿轮51转动时与穿过其中的套管轴52无干涉,松开离合按钮144,弹簧一143回弹,离合按钮144沿着套筒19往回滑动,同时离合按钮144带动转矩电机141和输出齿轮142一同往回滑动,输出齿轮142离开驱动开关20,驱动开关20无信号反馈给控制电路13,转矩电机141转动停止,输出齿轮142位移到位移齿轮171的下方并与位移齿轮171啮合。
[0067]
实施例三:
[0068]
参见图1至图10,图中示出了本发明实施例三提供的一种应用于手术机器人的超
声刀,本实施例在上述实施例的基础上还进一步地做出了以下作为改进的技术方案:换能盒体3内包括翘板式齿轮卡位28,转矩电机141远端还包括刚性连接销29,驱动仓33远端还包括翘板式卡板30,当转矩电机141和输出齿轮142在驱动仓33近端时,刚性连接销29压动翘板式卡板30,使翘板式卡板30卡住旋紧齿轮51防止其旋转;当转矩电机141和输出齿轮142在驱动仓33远端时,刚性连接销29压动翘板式卡板30,使翘板式卡板30卡住位移齿轮171防止其旋转。
[0069]
具体地,参见图1至图10,换能盒体3还包括控制仓32,电池模组11、电池电路12和控制电路13皆设于控制仓32内;电池电路12、换能器7和转矩电机141皆与控制电路13电性连接。
[0070]
实施例四:
[0071]
参见图1至图10,图中示出了本发明实施例四提供的一种应用于手术机器人的超声刀,本实施例在上述实施例的基础上还进一步地做出了以下作为改进的技术方案:换能盒体3上面向连接部件4的外壁上设置有多个接触头25,接触头25贴合导电触片16,接触头25和电池电路12电性连接,连接部件4上设置有电气接头26,电气接头26贴合导电触片16,电气接头26与控制电路13电性连接,该连接部件4具体可以为安装法兰。
[0072]
换能盒体3单独拆卸后,通过连接接触头25可以给电池模组11充电,同时,也可以通过接触头25给控制电路13导入设定的程序;连接部件4在安装在手术机器人上后,通过电气接头26连接手术机器人的数据接入端,使得超声刀和机器人一体化同步控制,电气接头26通过导电触片16和接触头25和控制电路13连接。
[0073]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1