手持式外科手术器械的制作方法
手持式外科手术器械
1.相关申请的交叉引用
2.本申请要求2019年12月6日提交的美国临时专利申请序列第62/944,400号的权益和优先权,所述临时专利申请的全部内容以引用的方式并入本文中。
背景技术:
3.多个手柄组合件制造商已开发具有用于操作和/或操控机电外科手术器械的专属驱动系统的产品线。在许多情况下,机电外科手术器械包含可重复使用的手柄组合件,以及一次性装载单元和/或单次使用的装载单元,所述装载单元例如外科手术末端执行器,其在使用前选择性地连接到手柄组合件并且接着在使用之后与手柄组合件断开连接以便弃置或在一些情况下进行灭菌以供再次使用。
技术实现要素:
4.在本公开的一个方面中,提供了一种手持式外科手术器械的手柄组合件,并且其包含手柄壳体、支撑在所述手柄壳体中的齿条、位于所述手柄壳体内的内壳体以及惰性小齿轮。齿条可在手柄壳体内轴向移动并且被配置成以可操作的方式联接到外科手术末端执行器的从动部件。惰性小齿轮支撑在内壳体中并且以可操作的方式联接到齿条。惰性小齿轮被配置成使齿条平移。
5.在各方面中,手柄壳体可包含筒部分和从所述筒部分横向并向近端延伸的手柄部分。
6.在一些方面中,齿条可位于筒部分中并且可限定与由所述筒部分限定的纵向轴线平行的纵向轴线。
7.在其它方面中,惰性小齿轮可包含与齿条啮合的上端部分,以及下端部分。
8.在其它方面中,惰性小齿轮可限定位于上端部分与下端部分之间的凹部。惰性小齿轮可具有位于凹部中的o形环密封件。
9.在各方面中,惰性小齿轮可相对于内壳体并在所述内壳体内旋转。
10.在一些方面中,惰性小齿轮的下端部分可从内壳体突出。
11.在其它方面中,手柄组合件可另外包含被配置成位于手柄壳体内的马达,以及以可操作的方式联接到所述马达并被配置成与惰性小齿轮的下端部分啮合的小齿轮。
12.在其它方面中,所述内壳体可限定第一纵向延伸通道。齿条可延伸穿过第一通道。
13.在各方面中,内壳体可限定相对于第一通道横向延伸并与所述第一通道连通的第二通道。惰性小齿轮可容纳在第二通道中。
14.根据本公开的另一方面,提供了一种手持式外科手术器械,并且其包含手柄壳体、被配置成容纳在所述手柄壳体中的器械模块以及支撑在所述手柄壳体中的齿条。器械模块包含马达和以可操作的方式联接到所述马达的齿轮。齿条支撑在手柄壳体中并且可在所述手柄壳体内轴向移动。齿条被配置成以可操作的方式联接到外科手术末端执行器的从动部件。齿轮被配置成以可操作的方式联接到齿条,使得所述齿轮的旋转引起所述齿条平移。
15.在各方面中,手持式外科手术器械可另外包含被配置成容纳在手柄壳体中的外壳。外壳将器械模块容纳在其中。
16.在一些方面中,手持式外科手术器械可另外包含位于手柄壳体内的内壳体。内壳体可限定其中有齿条延伸穿过的第一通道。
17.在其它方面中,手持式外科手术器械可另外包含支撑在内壳体的第二通道中并且以可操作的方式联接到齿条的惰性小齿轮。惰性小齿轮可被配置成响应于器械模块的齿轮的旋转而使齿条平移。
18.在其它方面中,手持式外科手术器械可另外包含惰性小齿轮,所述惰性小齿轮具有与齿条啮合的上端部分以及被配置成与器械模块的齿轮啮合的下端部分。
19.在各方面中,惰性小齿轮可限定位于上端部分与下端部分之间的凹部。惰性小齿轮可具有位于凹部中的o形环密封件。
20.在一些方面中,器械模块可另外包含用于为马达供电的电池。
21.在其它方面中,手持式外科手术器械可另外包含以可移动的方式联接到手柄壳体的按钮,以及印刷电路板。按钮可与印刷电路板相关联,并且电池可以可拆卸的方式联接到所述印刷电路板,使得所述按钮的致动启动所述电池。
22.如本文所用,术语平行和垂直被理解为包含基本平行和基本垂直的相对配置,所述基本平行和基本垂直与真正的平行和真正的垂直最多相差大约+10度或
‑
10度。
附图说明
23.本文中参考附图对本公开的实施例进行了描述,其中:
24.图1是示出手持式机电外科手术器械的侧视图,所述手持式机电外科手术器械包含其中动力组合件分开示出的手柄组合件、联接到所述手柄组合件的轴部分以及联接到所述轴部分的外科手术末端执行器;
25.图2是示出图1的手柄组合件的手柄壳体的局部透视图;
26.图3a是示出包含具有器械模块和外壳的动力组合件的图2动力组合件的零件分开的透视图;
27.图3b是示出图3a的动力组合件的器械模块的组装后前视图;
28.图4是示出手柄组合件的内部组件的侧视图,其中手柄壳体的一半壳体被移除;
29.图5是示出图2的手柄组合件的内部组件的放大侧视图,其中手柄壳体的一半壳体和动力组合件被移除;
30.图6是示出图2的手柄组合件的齿条与小齿轮组合件的细节的零件分开的局部透视图;
31.图7是示出图1的外科手术末端执行器的零件分开的透视图。
具体实施方式
32.参考附图详细地描述本发明所公开的包含其手柄组合件的外科手术器械的实施例,其中相同的附图标记在若干视图中的每一个中表示相同或对应元件。如本文所用,术语“远端”是指外科手术器械或其组件离使用者较远的部分,而术语“近端”是指外科手术器械或其组件离使用者较近的部分。
33.如以下将详细描述的,提供了一种手持式外科手术器械的手柄组合件,其具有马达驱动的小齿轮和以可操作的方式联接到所述齿轮的齿条。齿条被配置成响应于马达的致动而实行联接到手柄组合件的外科手术末端执行器的功能。进一步提供了符合人体工程学的一次性手柄壳体和可重复使用的动力组合件(例如,容纳在无菌或非无菌外壳内的器械模块)。下文进一步详述所公开的外科手术器械的其它特征和益处。
34.参考图1和图2,根据本公开的实施例的外科手术器械一般表示为10,并且呈电动手持式机电外科手术器械的形式,其被配置成将例如图1和图7的外科手术末端执行器200的多种不同外科手术末端执行器选择性地联接到其上。末端执行器200被配置成由电动手持式机电外科手术器械10致动和操控。手持式机电外科手术器械10包含手柄组合件100、联接到所述手柄组合件100的旋钮壳体102以及轴部分104,所述轴部分从所述旋钮壳体102向远端延伸并被配置成用于与例如末端执行器200的手术附接件选择性地连接。
35.手柄组合件100包含一次性并且无菌的手柄壳体110,其具有:例如筒部分118的主体;手柄部分108,其从所述筒部分118垂直向下延伸或从所述筒部分118横向并向近端延伸;以及铰接门120,其可枢转地联接到所述手柄部分108。门120选择性地打开和关闭,以允许插入或移除非无菌动力组合件122。手柄部分108和门120各自具有内周边,所述内周边在关闭所述门120时共同限定用于动力组合件122的无菌屏障117(图4)。在各方面中,筒部分118的近端部分或任何合适位置可具有透明窗口(未示出),以允许查看显示器(例如lcd,未示出)。
36.手柄组合件100具有击发开关106,所述击发开关被配置并调适成致动末端执行器200的各种功能。击发开关106可构造为可枢转地联接到手柄壳体110的手柄部分108的触发杆。启动击发开关106来启动马达112(图3a和3b)以使外科手术器械10的击发杆(未明确示出)前进或缩回,这取决于是致动所述击发开关106的顶部按钮106a还是底部按钮106b。击发杆联接到末端执行器200的驱动组合件209(图7)(其包含刀杆211和致动滑座213),使得击发杆的前进使所述末端执行器200的所述驱动组合件209前进,这样就在安全开关116处于致动状态时使所述末端执行器200的夹钳部件206、208闭合以及击发所述末端执行器200。
37.手柄组合件100具有铰接开关114,所述铰接开关横向延伸穿过手柄部分108并且从所述手柄部分108的左侧和右侧向外突出。铰接开关114被配置成致动末端执行器200的铰接(例如,沿着水平面在与轴部分104同轴的位置与不与所述轴部分104对准的多个位置之间移动末端执行器200)。旋钮壳体102可旋转地联接到手柄壳体110并且具有不可旋转地联接到其上的轴部分104。如此,旋钮壳体102的手动旋转引起末端执行器200的对应旋转(例如,末端执行器200围绕由轴部分104限定的中心纵向轴线“x”旋转)。波形弹簧121(图4)提供对旋钮壳体102的无意旋转的阻力。
38.手柄组合件100可另外包含构造为横向延伸穿过手柄壳体110的筒部分118的触感开关的安全开关116。安全开关116具有暴露于手柄壳体110的外表面的相对的末端部分,以允许临床医生在不可击发位置与可击发位置之间滑动安全开关116。在不可击发位置,安全开关116接触或松开手柄组合件100的印刷电路板126(图4)上的接触开关124(图4),由此用信号通知动力组合件122的处理器136以防止马达112的启动,而不管是否致动了击发开关106。在可击发位置,安全开关116接触或松开接触开关124,由此用信号通知处理器136以允
许在致动击发开关106后启动马达112。在各方面中,安全开关116可在其中具有被配置成闪烁或以稳定状态保持接通的灯,以指示安全开关116的位置。
39.在一些实施例中,可指定手柄组合件100的开关106、114、116来致动待由各种外科手术末端执行器执行的各种功能。预期开关106、114、116可以进行各种配置,例如配置为开关、摇臂、翼片、闩锁、操纵杆、拨号盘、按钮或触摸屏。
40.参考图1、图3a、图3b和图4,手柄组合件100的可重复使用动力组合件122包含无菌外壳128和被配置成用于可移除地容纳在所述外壳128中的可重复使用的器械模块130。外壳128具有容纳在所述外壳128的敞开底部末端中的盖子132,以及以便于移除所述盖子132的弹簧加载的拉片134。器械模块130包含马达112,所述马达例如电驱动马达,所述电驱动马达电连接或无线连接到马达控制器或处理器136和电池138。在各方面中,电池138可包含升压电路并且可以是可再充电的(例如,可无线地再充电)。电池138具有卡缘连接器140,所述卡缘连接器被配置成用于可拆卸地容纳印刷电路板126的卡缘头部142,以允许进行从击发开关106、安全开关116、铰接开关114和铰接编码器到电池138的通信。处理器136可包含usb充电连接器144,以允许用usb充电器或无线地(例如,通过感应)给电池138充电。
41.器械模块130另外包含以可操作的方式联接到驱动马达112的例如行星齿轮箱的齿轮箱146,以及例如小齿轮的输出齿轮148,所述输出齿轮驱动地联接到所述齿轮箱146并被配置成围绕由所述齿轮箱146限定的纵向轴线旋转。行星齿轮箱146在减小速度的同时增大力矩。
42.除了行星齿轮箱146的上部部分和小齿轮148之外,器械模块130的所有组件都隐藏在外壳128内。由马达112旋转小齿轮148用以驱动手柄组合件100的轴和/或齿轮组件,以便执行末端执行器200(图7)的各种操作。举例来说,马达112被配置成使末端执行器200的夹钳部件206、208(图7)相对于彼此移动以及从所述末端执行器200发射钉。
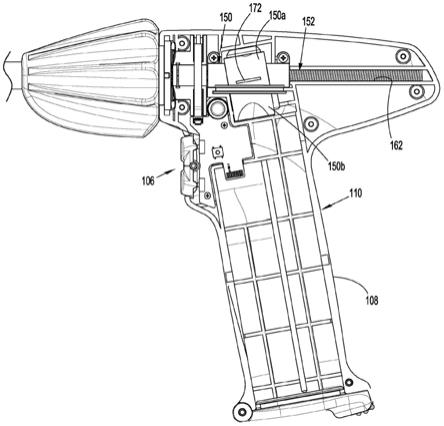
43.参考图4
‑
6,手柄组合件100包含内壳体150和齿条与小齿轮组合件152。手柄组合件100的内壳体150固定在手柄壳体110的筒部分118内,并包含顶端部分150a和底端部分150b。内壳体150限定垂直延伸穿过其上端部分150a和下端部分150b的第一通道154。第一通道154可具有圆柱形配置或任何其它合适的形状,以允许齿条与小齿轮组合件152的惰性小齿轮160在其中旋转。内壳体150还限定水平延伸穿过其上端部分150a的第二通道156。第二通道156可具有矩形形状或任何其它合适的形状,以允许齿条与小齿轮组合件152的齿条162平移穿过其中。第二通道156与第一通道154连通,使得惰性小齿轮160和齿条162可以彼此啮合。
44.齿条与小齿轮组合件152另外包含:盖164,其固定到内壳体150的上端部分150a;以及销钉166,其固定到所述盖164并且延伸穿过所述内壳体150的第一通道154。惰性小齿轮160围绕销钉166定位,并容纳在内壳体150的第一通道154中。惰性小齿轮160具有单块形成或整体彼此连接的上端部分160a和下端部分160b。惰性小齿轮160的底端部分160b被配置成突出超过内壳体150的底端部分150b,以在动力组合件122容纳在手柄壳体110的手柄部分108中时选择性地啮合器械模块130的输出小齿轮148(图3a和3b)。惰性小齿轮160的顶端部分160a位于内壳体150的上端部分150a中,并与齿条162的齿啮合。
45.惰性小齿轮160在其上端部分160a与下端部分160b之间限定环形凹部170。环形凹部170在其中容纳o形环密封件172(图5)。o形环密封件172捕获在内壳体150中限定的内部
环形凹槽(未明确示出)中。惰性小齿轮160轴向支撑在内壳体150的第一通道154中,同时用于所述惰性小齿轮160在所述内壳体150的第一通道154中的旋转。
46.齿条与小齿轮组合件152的齿条162设置在手柄壳体110的筒部分118中并且平行于所述筒部分118延伸。齿条162延伸穿过内壳体150的第二通道156,并且具有被配置成以可操作的方式联接到末端执行器200的驱动组合件209(图7)的远端部分(未明确示出)。齿条162通过惰性小齿轮160的上端部分160a以可操作的方式联接到输出小齿轮148(图3a和3b)。在各方面中,齿条162可直接啮合到输出小齿轮148。
47.参考图7,末端执行器200可被配置成联接到外科手术器械10的轴部分104的远端。末端执行器200包含近端主体部分202和工具组合件204。近端主体部分202可拆卸地附接到手柄部分102,并且工具组合件204枢转地附接到末端执行器200的近端主体部分202的远端。近端主体部分202被配置成通过铰接马达113(图4)和相关联的铰接组合件115的致动而相对于轴部分102的远端进行铰接。柔性电路线圈119(图6)联接到铰接马达113以维持所述铰接马达113与印刷电路板126之间的电连通,同时允许旋钮壳体102的旋转。工具组合件204包含砧座组合件206和钉仓组合件208。钉仓组合件208相对于砧座组合件206枢转,并且可在开放或未夹持位置和闭合或夹持位置之间移动以插入穿过套管针的插管。
48.为了详细论述如图1和图7中所示出的外科手术末端执行器200的构造和操作,可参考2009年8月31日提交的标题为“用于外科手术钉合装置的工具组合件(tool assembly for a surgical stapling device)”的美国专利第7,819,896号,所述专利的全部内容以引用的方式并入本文中。
49.在操作中,将动力组合件122插入手柄壳体110的手柄部分108中,并且关闭门120,由此将非无菌动力组合件122密封在无菌手柄部分108中。印刷电路板126的卡缘头部142连接到器械模块130的卡缘连接器140。在正确插入动力组合件122后,器械模块130的输出小齿轮148啮合地接合惰性小齿轮160的底端部分160b。
50.为了操作外科手术末端执行器200,可触发击发开关106,从而电池138为马达112提供动力,所述马达通过齿轮箱146驱动输出小齿轮148的旋转。当输出小齿轮112沿第一方向旋转时,惰性小齿轮148沿相反的第二方向旋转,以使齿条162沿手柄壳体110的筒部分118的纵向轴线平移。由于齿条162以可操作的方式联接到外科手术末端执行器200的驱动组合件209,所以所述齿条162的平移引起打开或关闭夹钳部件206、208,这取决于所述齿条162的平移方向。为了从外科手术末端执行器200发射钉,致动安全开关116,然后致动击发开关106的底部按钮106b,从而使所述外科手术末端执行器200的滑座213平移穿过钉仓组合件208,以将钉射入组织。
51.考虑到强度、耐久性、耐磨损性、重量、耐腐蚀性、易于制造性、制造成本等,本文中所描述的组件中的任一个可由金属、塑料、树脂、复合材料等制造而成。本文中公开的齿轮中的任何一个可配置为任何合适的齿轮,如锥齿轮、正齿轮、螺旋齿轮、蜗轮等。
52.应理解,可对本发明所公开的包含开关组合件的外科手术器械的实施例作出各种修改。因此,以上描述和附图不应解释为限制性的,而仅仅是作为实施例的例证。所属领域的技术人员将设想在本公开的范围和精神内的其它修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1