一种基于超声系统的包皮切割器械的制作方法
[0001]
本专利涉及医疗领域,特别是涉及一种基于超声系统的包皮切割器械。
背景技术:
[0002]
在现有的包皮切割手术中,基本采用机械切割的方式对手术部位进行切除,在术后存在愈合时间长,止血时间长的问题,在术后会给患者的生活带来一定的困扰。在术后一端时间需要到医院拆线。而使用包皮环切器械,术后将在手术部位装配吻合器械,进行持续创口压迫止血,并需要携带一段时间,直到伤口愈合才能去除,这样会给患者的生活带来一定程度的困扰。
技术实现要素:
[0003]
本发明的目的是提供一种结构简单、可减轻病人痛苦的基于超声系统的包皮切割器械。
[0004]
本发明通过下述技术方案实现:
[0005]
一种基于超声系统的包皮切割器械,包括龟头包皮固定装置、连杆和超声剪刀,所述龟头包皮固定装置设有与阴茎大小相匹配的内腔,所述龟头包皮固定装置的内腔用于定位阴茎、内腔体外壁用于固定包皮,所述连杆的一端安装有超声剪刀,另一端可转动的安装在龟头包皮固定装置上,使得连杆可以龟头包皮固定装置内腔的中心轴为中心绕所述内腔旋转,所述超声剪刀的刀杆设置在龟头包皮固定装置的外侧、且与包皮待切位置相匹配。
[0006]
本实施方式中,所述龟头包皮固定装置包括龟头罩、龟头罩连杆和龟头罩把手,所述龟头罩连杆连接龟头罩和龟头罩把手,所述龟头罩内设有与阴茎大小相匹配的内腔,所述龟头罩连杆上设有与连杆相匹配的连杆限位槽,所述连杆安装在所述连杆限位槽内,所述连杆装配后能绕龟头罩连杆的中心轴转动。
[0007]
本实施方式中,所述龟头罩为硬质耐磨塑胶制作而成的龟头罩,一方面,能有效的保护龟头部分,并且在切割时能耐受一定时间的切割,另一方面,与超声剪刀的刀杆的相互作用时能有效保护刀杆,防止对刀杆造成损伤。
[0008]
本实施方式中,所述龟头罩连杆为金属杆的龟头罩连杆。
[0009]
本实施方式中,所述超声剪刀包括刀柄、换能器刀杆组件、电子阻尼轴承和导向定位装置,所述刀柄固定在连杆上,所述换能器刀杆组件安装在刀柄上,所述导向定位装置通过电子阻尼轴承铰接在刀柄上,所述换能器刀杆组件包括用于切割的刀杆,所述导向定位装置包括导向块,所述刀杆和导向块设置在同一平面并且分别设置在龟头罩中心轴的两侧。使用时导向块其靠压在龟头罩外侧,对刀杆进行导向,所述导向块与包皮接触侧设有可涂抹润滑油或采用具有良好的润滑性能的材料层,从而减小导向块和包皮间的滑动。
[0010]
本实施方式中,还包括用于卡装在龟头罩外侧用于锁定包皮位置的卡环。
[0011]
本实施方式中,所述卡环与龟头罩外径大小相匹配,所述卡环由两个半圆环构成,两个半圆环的一端通过柔性连接件连接,另一端通过卡扣连接,所述卡环内与包皮接触一
侧设有齿形防滑结构。
[0012]
采用上述结构,本装置先通过龟头罩对包皮进行定位,再通过超声剪刀对包皮进行切割,超声剪刀在切割时通过连杆作为定位轴,可绕龟头罩旋转,实现环切,超声剪刀切割速度快,减少出血,减少术后恢复时间,大大减轻了患者的痛苦。
附图说明
[0013]
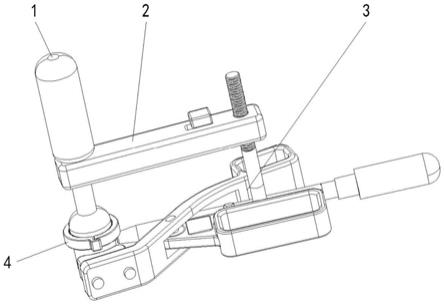
图1为本发明的整体结构示意图;
[0014]
图2为本发明龟头罩组件结构示意图;
[0015]
图3为本发明超声剪刀结构示意图;
[0016]
图4为本发明刀杆及环能器部分结构示意图;
[0017]
图5为本发明卡环结构示意图;
[0018]
附图说明:1、龟头包皮固定装置,2、连杆,3、超声剪刀,4、卡环,101、龟头罩把手,102、龟头罩连杆,103、龟头罩,1021、连杆限位槽,301、刀柄,302、换能器刀杆组件,303、电子阻尼轴承,304、导向定位装置,3041、导向块3041,3042、缓冲垫,3043、压力传感器,3044、导向柱,3011、中心控制模块,3012、开关按键, 3013、安装杆,3021、刀杆,3022、硅胶圈,3023、外套管,3024、变幅杆,3025、压电陶瓷,3026、电极片,3027、后盖螺丝,3028、输出控制模块,3029、储能电池。
具体实施方式
[0019]
在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
[0020]
如图1至5所示,一种基于超声系统的包皮切割器械,包括龟头包皮固定装置1、连杆2、超声剪刀3、卡环4个部分,其中超声剪刀3安装在连杆2上,连杆2的端部可转动的安装在龟头包皮固定装置1上,使得连杆2可以龟头包皮固定装置1的中心轴为中心绕龟头包皮固定装置1旋转,阴茎插入在龟头包皮固定装置1内腔,包皮包覆在龟头包皮固定装置1外侧,再使用卡环4将包皮固定住在龟头包皮固定装置1外侧,超声剪刀3为切割的工作部件,负责完成包皮的切割工作。连杆2为器械的辅助部件,帮助确定超声剪刀3和龟头包皮固定装置1的相对位置,并保证其在切割过程中切割线不发生偏移,能行之有效的完成环形切割。
[0021]
如图2所示,龟头包皮固定装置1包括龟头罩103、龟头罩连杆 102和龟头罩把手101,龟头罩103为硬质耐磨塑胶制作而成,一方面,能有效的保护龟头部分,并且在切割时能耐受一定时间的切割,另一方面,与超声剪刀的刀杆3021的相互作用时能有效保护刀杆,防止对刀杆造成损伤。所述龟头罩连杆102为金属杆,龟头罩连杆 102连接龟头罩103和龟头罩把手101,龟头罩把手101和龟头罩连杆102螺纹连接,龟头罩连杆102上设有与连杆2相匹配的连杆限位槽1021,使用前先将连杆装配到龟头罩连杆102的连杆限位槽1021 处,然后将龟头罩把手101装配到龟头罩连杆102上,连杆2在装配后能绕龟头罩连杆102的中心轴转动,龟头罩把手101方便操作者使用时手持区域。
[0022]
如图3所示超声剪刀3包括刀柄301、换能器刀杆组件302、电子阻尼轴承303、导向
定位装置304、中心控制模块3011、开关按键 3012和安装杆3013,刀柄301通过安装杆3013固定在连杆2上,连杆上通过快速锁定与安装杆3013连接。换能器刀杆组件302固定在刀柄301,导向定位装置304通过电子阻尼轴承303铰接在刀柄301 上,所述电子阻尼轴承303为具有锁定功能的单向阻尼轴承,使导向定位装置304在闭合时缓慢闭合,减少因为快速闭合而造成的钳口部分压力剧烈变化,进而损坏刀具。所述导向定位装置304包括导向块 3041、缓冲垫3042、压力传感器3043和导向柱3044,所述换能器刀杆组件302包括刀杆3021、硅胶圈3022、外套管3023、变幅杆3024、振子、输出控制模块3028和储能电池3029,所述振子包括压电陶瓷 3025、电极片3026和后盖螺丝3027,刀杆3021位于外套管3023内部,外部套有硅胶圈3022,用来隔离刀杆3021和外套管3023的声学振动,也起到支撑刀杆,减少其横向振动,所述振子在驱动模块作用下按照一定的频率达到振动,中心控制模块3011根据实际反馈调节主要工作频率,所述导向块3041与刀杆3021处于同一平面,并且导向块3041与刀杆3021分别设置在龟头罩103外侧、中轴线的两侧,所述导向块3041所受压力经过缓冲后传递给缓冲垫3042,进而,压力传感器3043将压力值传递给中心控制模块3011,当其压力达到预定压力区间时,将控制电子阻尼轴承303进入锁定状态,中心控制模块3011控制换能器刀杆组件302内的驱动模块开始工作,进而刀杆 3021开始进行切割,完成后再次短按系统同停止切割,
[0023]
如图5所示,卡环4为由两个半圆环构成,两个半圆环的一端通过柔性连接件401连接,另一端通过卡扣连接,所述卡环4内与包皮接触一侧设有齿形防滑结构402,方便将包皮固定在龟头罩外侧,防止滑脱,卡环打开后能绕柔性连接件401进行开合,通过卡扣40锁定。
[0024]
使用时,先使用龟头罩1罩住龟头部分,将包皮部分包覆于龟头罩1外侧,使用卡环4将包皮固定在龟头罩1外侧。将超声剪刀3打开,调节超声剪刀3的位置,使刀杆3021的切割部位位于包皮的合适位置,缓慢闭合超声剪刀,使其刀杆3021压力达到预定值,按压按键,启动超声刀,然后手动转动超声剪刀3,直至完成切割,使用完成后,长按按键,解除锁定。
[0025]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1