基于浦肯野图像确定患者眼睛当前位置的方法与流程
1.本发明涉及用于确定在治疗设备的光束偏转装置的中性姿态下患者的眼睛相对于激光束的光轴的当前位置的方法。此外,本发明涉及治疗设备、计算机程序以及计算机可读介质。
背景技术:
2.可能由炎症、受伤或先天性疾病引起的角膜内不透明和疤痕会损害视力。特别是在角膜的这些病理和/或不自然改变的区域位于眼睛的视轴中的情况下,清晰的视力会受到很大干扰。迄今为止,现有技术给出了借助于相应治疗设备的不同激光方法,其可以将体积体与角膜分离,从而改善患者的视力。这些激光方法尤其是侵入性干预,使得如果在尽可能短的时间内并且以特别有效的程度进行干预,则对患者特别有利。其中,体积体尤其仅包括改变的角膜面积。因此,基于现有技术,特别重要的是能够对干预中使用的治疗设备的装置进行精确的位置确定。
3.发明概述
4.因此,本发明的目的是提供方法和治疗设备,通过该方法和治疗设备,可以以改善的方式捕获治疗设备的患者接口的当前位置。
5.该目的通过根据独立权利要求的方法、治疗设备、计算机程序以及计算机可读介质来解决。在相应的从属权利要求中说明了本发明的具有方便发展的有利构造,其中,该方法的有利构造被认为是治疗设备、计算机程序以及计算机可读介质的有利构造,反之亦然。
6.本发明的一个方面涉及用于确定在治疗设备的光束偏转装置的中性姿态下患者的眼睛相对于激光束的光轴的当前位置的方法。根据患者的患者信息来预设表征眼睛的标准。确定眼睛相对于光轴的目标位置。治疗设备的患者接口位于光轴前面的预设区域中。在患者接口与眼睛的接近程序中,通过治疗设备的照明装置对眼睛进行照明。在接近程序中,借助于治疗设备的光学捕获装置捕获与眼睛的角膜相关的浦肯野图像。将捕获的浦肯野图像与光轴进行比较,并据此确定眼睛的当前位置。根据目标位置确定当前位置,并根据当前位置与目标位置的偏差确定控制信号向治疗设备的控制装置的输出。
7.从而,允许根据浦肯野图像将眼睛的当前位置与眼睛的目标位置进行比较。因此,可以以简单的方式但以可靠的方式确定眼睛的当前位置,特别是在治疗程序中。从而,由于可以可靠地确定眼睛的位置,因此可以更加患者友好地进行眼睛的治疗,从而可以在眼睛的正确位置可靠地实现治疗。特别地,基于浦肯野图像相对于光轴的捕获位置,可以确定当前位置。
8.特别地,光束偏转装置具有中性姿势。例如,光束偏转装置可具有两个反射镜,用于偏转激光束。然后,中性姿态被给予镜之间的所谓的0/0姿态。通过反射镜的旋转,入射的激光束发生偏转并且因此可以例如定位在角膜上。因此,光束偏转装置具有旋转轴,根据反射镜位置,入射激光束可以绕该旋转轴旋转。光轴尤其描述了在光束偏转装置的中性姿态下的激光束的位置,该光束偏转装置也可以称为扫描仪。
9.根据有利的构造形式,将眼睛的瞳孔中心和/或眼睛的角膜顶点预设为表征眼睛的标准。特别地,可以在治疗之前借助于治疗设备确定表征标准。例如,可以基于未经治疗的角膜的形貌和/或测速和/或形态学数据来确定眼睛的瞳孔中心和/或角膜顶点。由此,可以可靠地确定眼睛的目标位置。
10.如果捕获一阶或二阶浦肯野反射作为浦肯野图像,则也是有利的。特别地,捕获一阶浦肯野反射的浦肯野图像。从而允许例如可以借助治疗设备进行自动的眼睛跟踪,因为特别是借助于捕获装置在光学上可以很好地感知一阶浦肯野反射。因此,不需要用户例如眼镜师的手动干预就能够执行相应的位置校正。
11.此外,已经证明有利的是,如果在接近程序中以确定的偏差产生控制信号,从而执行患者接口或光轴的位置校正。换句话说,如果确定的当前位置应偏离目标位置,则可以将患者接口定位为从当前位置到达目标位置,或者可以通过例如校正光束偏转装置来校正光轴,因此可以执行光轴的重新定向。由此,即使以确定的偏差也能够可靠地进行患者的治疗。
12.如果在接近程序期间确定的偏差低于预设的偏差阈值之后,产生控制信号以使得执行患者接口与眼睛对接的程序,则也是有利的。例如,如果应该确定偏差,但是该偏差低于预设的阈值,则仍然可以进一步执行接近程序,并且可以在接近程序之后执行患者接口与眼睛的对接程序。特别地,然后可以在对接程序之后进行眼睛的治疗。由此,可以减少治疗持续时间,因为特别地不必再次执行接近程序。
13.此外,已经证明有利的是,如果在对接程序之后并且在有偏差的情况下产生控制信号,使得借助于患者接口执行瞳孔相对于患者接口的位置校正。换句话说,如果应该在对接程序之后确定偏差,则仍然可以进一步执行位置校正,因为瞳孔特别是相对于患者接口移位。因此,由于可以在对接程序之后进一步进行位置校正,因此可以缩短治疗持续时间。
14.在另一有利的构造形式中,在对接程序之后评估对接程序之前的光学捕获装置的最后图像,其中在评估中将所捕获的瞳孔位置与浦肯野图像进行比较。特别地,在对接程序之后不再存在浦肯野图像。因此,将其中仍然存在浦肯野图像的最后一帧与其中不再存在浦肯野图像的下一帧进行比较。由此,由于与患者接口的接触可以首先在角膜顶点处被记录,因此可以尤其可靠地,有效地确定瞳孔位置以及角膜顶点或角膜顶点位置。
15.进一步有利的是,在对接程序之后评估对接程序之前的光学捕获装置的最后图像和对接程序之后的光学捕获装置的第一图像,其中,在评估中将所捕获的角膜顶点位置与浦肯野图像进行比较。特别是,对接程序后,浦肯野图像已消失。因此,患者接口现在接触眼睛的位置尤其是眼睛的角膜顶点位置。由此,可以可靠地确定角膜顶点位置。特别地,可以将所确定的角膜顶点位置与预设的角膜顶点位置进行比较,该预设的角膜顶点位置例如已经基于患者信息来确定,从而也可以借助该评估方法来进行眼睛的位置确定。
16.进一步证明有利的是,在对接程序之后,通过患者接口的抽吸装置将眼睛抽吸并固定在患者接口上。特别地,可以在接近程序期间执行患者接口的位置校正。在对接程序之后,然后基于抽吸装置抽吸并固定眼睛,使得眼睛相对于患者接口的位置位移至少基本上不再发生。由此,可以可靠地进行眼睛的治疗。
17.此外,已经证明有利的是,借助于光学捕获装置另外捕获眼睛的当前瞳孔位置以确定当前位置。因此,尤其还可以基于对瞳孔位置的评估并且尤其是通过与预设的瞳孔位
置进行比较来可靠地确定眼睛的位置。因此,可以以冗余的方式确定眼睛的位置。由此,可靠地允许治疗患者的眼睛。
18.如果通过照明装置的照明环或照明点或通过照明装置的照明半环或通过照明装置的照明扇形照明眼睛以产生浦肯野图像,则进一步证明是有利的。特别地,通过不同形式的配置,可以可靠地捕获浦肯野图像。特别地,可以可靠地产生浦肯野反射。通过照明环、照明点或照明半环的构造形式或通过照明扇形,例如也可以识别出扭转,因为除了照明之外,还可以捕获照明装置相对于浦肯野图像的相对位置变化。因此,有可能可以通过不同的照明装置来捕获浦肯野图像。
19.在另一有利的构造形式中,当偏差高于预设的偏差阈值时,接近程序被中止并且再次执行接近程序和/或对接程序被中止并且再次执行对接程序和/或患者接口被重新定位为控制信号。因此,允许以不同的方式生成控制信号,并且不以超过预设偏差阈值的偏差执行眼睛的治疗,从而不会发生误治疗。
20.如果以高于预设偏差阈值的偏差进行眼外科手术激光器,尤其是光轴的位置变化,则也是有利的。例如,这可以通过光束偏转装置的位置校正来执行。因此,还允许重新定位眼外科手术激光器,使得即使有偏差,仍可以可靠地进行眼睛治疗,也减少了时间。
21.在另一有利的构造形式中,通过布置在患者接口处的照明装置来对眼睛进行照明,和/或通过布置在患者接口处的捕捉装置来捕捉浦肯野图像。换句话说,捕获装置和照明装置可以被布置在患者接口处。由此,允许捕获装置和照明装置可以与患者接口同时且特别是可靠地移动,由此可以在治疗期间可靠地捕获浦肯野图像。
22.本发明的另一方面涉及治疗设备,该治疗设备具有至少一个眼外科手术激光器,用于例如通过光破坏而分离具有人眼或动物眼睛的预定界面的体积体,并且具有用于该激光器或多个激光器的至少一个控制装置,其被形成为执行根据前述方面的方法的步骤。
23.其中,激光适合于以在1fs与1ns之间,优选在10fs与10ps之间的相应脉冲持续时间以及大于10khz,优选在100khz至100mhz之间的重复频率发射在300nm与1,400nm之间,优选在700nm与1,200nm之间的波长范围内的激光脉冲。
24.在治疗设备的有利的构造形式中,治疗设备包括用于至少临时存储至少一个控制数据集的存储装置,其中一个或多个控制数据集包括用于在角膜中定位和/或聚焦单个激光脉冲的控制数据,并且包括至少一个光束偏转装置,用于对激光的激光束进行光束引导和/或光束整形和/或光束偏转和/或光束聚焦。其中,所提及的控制数据集通常是基于所测量的待治疗角膜的形貌和/或测速和/或形态以及要在角膜内去除的病理和/或不自然改变的区域的类型而生成的。
25.其他特征及其优点可以从第一发明方面的描述中得出,其中,每个发明方面的有利构造应被视为分别是另一个发明方面的有利构造。
26.本发明的第三方面涉及包括命令的计算机程序,所述命令使根据第二发明方面的治疗设备执行根据第一发明方面的方法步骤。本发明的第四方面涉及计算机可读介质,在该计算机可读介质上存储了根据第三发明方面的计算机程序。其他特征及其优点可以从对第一和第二发明方面的描述中得出,其中,每个发明方面的有利构造应被认为分别是另一个发明方面的有利构造。
27.根据权利要求书、附图和附图说明,其他特征是显而易见的。在说明书中上面提到
的特征和特征组合以及在附图说明中下面提到的特征和/或特征组合和/或仅在附图中示出的特征和特征组合不仅可以在分别规定的组合中使用,而且可以在其他组合中使用而不脱离从本发明的范围。因此,实施方式也应被认为是本发明所涵盖和公开的,其未在附图中明确示出和说明,而是由与所说明的实施方式分离的特征组合产生并生成的。实施方式和特征组合也应被认为是公开的,因此不包括最初制定的独立权利要求的所有特征。而且,实施方式和特征组合应被认为是公开的,特别是通过以上阐述的实施方式,其超出或偏离权利要求的关系中阐述的特征组合。
附图说明
28.图1是根据本发明的治疗设备的示意图;
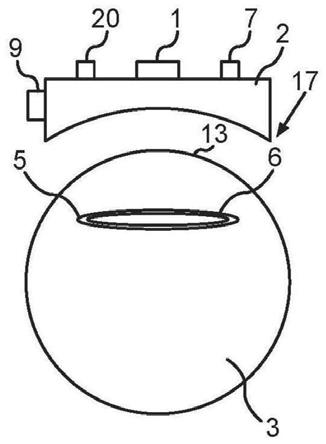
29.图2是在第一情况下具有患者接口的治疗设备的实施方案的示意性侧视图;
30.图3是患者的眼睛的示意性俯视图;
31.图4是处于另一种情况下的患者接口的实施方案的另一示意性侧视图;
32.图5是患者的眼睛的另一示意性俯视图;
33.图6是处于另一种情况下的患者接口的实施方案的另一示意性侧视图;并且
34.图7是在另一情况下患者的眼睛的另一示意性俯视图。
35.在附图中,相同或功能相同的元件具有相同的附图标记。
36.发明详述
37.图1示出具有眼外科激光器18的治疗设备10的示意图,该眼外科激光器18用于例如通过光破坏分离具有例如人或动物眼睛3(图2)的角膜13(图2)的预定界面14、16的预定角膜体积或体积体12。人们认识到,在本实施方案中,除了激光器18之外还形成了用于激光器18的控制装置20,使得其以预定的模式将脉冲激光脉冲发射到角膜13中,其中,待分离体积体12的界面14、16通过光破坏以预定的图案产生。在所示的实施方案中,界面14、16形成透镜状体积体12,其中在该实施方案中选择体积体12的位置,使得包围角膜13的基质36内的病理和/或不自然改变的区域。此外,从图1可以明显看出,在基质36和上皮28之间形成了所谓的鲍曼膜38。
38.此外,人们认识到,由激光器18产生的激光束24借助于光束偏转装置22(例如,扫描仪)朝着角膜的表面26偏转。光束偏转装置22也由控制装置20控制,以在角膜中产生上述预定图案。光束偏转装置22可以例如包括两个反射镜,其被形成用于使入射激光束24偏转。在中性姿势下,所谓的反射镜的0/0位置,特别地形成激光束24的光轴4(图4)。
39.示出的激光器18是光破坏性激光器,其被形成为以在1fs和1ns之间,优选在10fs和10ps之间的相应脉冲持续时间以及大于10khz,优选地在100khz和100mhz之间的重复频率发射在300nm和1400nm之间,优选地在700nm和1200nm之间的波长范围内的激光脉冲。作为图1所示的治疗设备10的替代,也可以使用烧蚀去除体积体12的方法。
40.另外,控制装置20包括用于至少临时存储至少一个控制数据集的存储装置(未示出),其中一个或多个控制数据集包括用于在角膜13中定位和/或聚焦单个激光脉冲的控制数据。各个激光脉冲的位置数据和/或聚焦数据是基于例如在眼睛的基质36内去除的先前测量的角膜的形貌和/或测厚法和/或形态以及病理和/或不自然改变的区域32而产生的。
41.图2以示意性侧视图纯粹示例性地示出了治疗设备10。治疗设备10包括患者接口
2。患者接口2被形成用于未示出的患者的眼睛3的治疗设备10的眼外科手术激光器18。患者接口2可以例如借助于用于移动患者接口2的连接装置1联接至治疗设备10。
42.在图2中,示出了在所示情况下,患者接口2到眼睛3的距离例如为5cm。此外,在图2中的眼睛3处示出了虹膜5以及瞳孔6。
43.特别地,眼睛3的当前瞳孔位置17可以另外借助于光学捕获装置9捕获,以确定当前位置。
44.图3以俯视图示出了通过患者接口2到患者的眼睛3的视图。当前,瞳孔6以阴影线示出。
45.示出了用于确定患者的眼睛3相对于治疗设备10的激光束24的光轴4的当前位置的方法。根据患者的患者信息,预设表征眼睛3的标准。确定眼睛3相对于光轴4的第一目标位置。治疗设备10的患者接口2位于光轴4前方的预设区域中。在患者接口2到眼睛3的接近程序18a期间,借助于治疗设备10的照明装置7照明眼睛3。在接近程序18a期间,借助于治疗设备10的光学捕获装置9捕获与眼睛3的角膜13相关的浦肯野图像12a。将所捕获的浦肯野图像12a与光轴4进行比较,并据此确定眼睛3的当前位置。将当前位置与目标位置进行比较,并在当前位置与目标位置有偏差的情况下,将控制信号输出至治疗设备10的控制装置20。
46.例如,可以将眼睛3的瞳孔中心和/或眼睛3的角膜顶点15(图4)预设为表征眼睛3的标准。
47.特别地,图3进一步示出了静态投影11,特别是两个静态投影11,是由治疗设备10,特别是由照明装置7在患者接口2的前表面上产生的。静态投影8被示为在瞳孔6上的环,其是照明装置7在患者接口2的前表面上的静态投影。静态投影8尤其可以是与患者接口2相关的浦肯野图像。此外,示出了动态投影环,该动态投影环在眼睛3的角膜13的前表面上产生并且对应于浦肯野图像12a。此外,示出了照明装置7的两个动态投影14a,它们是在角膜13的前表面上产生的。
48.尤其可以规定,捕获一阶或二阶浦肯野反射作为浦肯野图像12a。当前,特别示出一阶浦肯野反射。
49.此外,在接近程序18a期间具有确定的偏差的情况下,可以产生控制信号,从而执行患者接口2或光轴4的位置校正。此外可以规定,在接近程序18a期间确定的偏差小于预设的偏差阈值之后,产生控制信号,使得执行患者接口2到眼睛3的对接程序。此外,在对接程序之后且有偏差的情况下,可以产生控制信号,使得借助于患者接口2执行瞳孔6相对于患者接口2的位置校正。
50.也可以通过照明环或照明点或通过照明半环或通过照明扇形体作为照明装置7对眼睛3进行照明,以产生浦肯野图像12a。类似地,可以规定,借助于红外照明装置作为照明装置7,通过红外光照明眼睛3,光学捕获装置9被构造成使得在眼睛3的至少在某些区域上反射的红外光被捕获。
51.图4以示意性侧视图示出了处于接近状态,因此在向眼睛3的接近程序18a期间的患者接口2。例如,如目前,患者接口2至眼睛3的距离可以为2至3mm。特别地,在眼睛3上示出了浦肯野图像12a。特别地,图4示出了光轴4。例如,如果现在应确定高于预设偏差阈值的偏差,则患者接口2可以重新定位。此外可以规定,以高于预设的偏差阈值的偏差进行眼外科
手术激光器18,尤其是光轴4的位置变化。
52.图5以另一俯视图示出了眼睛3。在图5中,患者接口2的位置尤其如图4的侧视图中所示。在图5中,相应的位移以及因此当前位置与目标位置的偏差可以被记录。基于该位移,现在可以产生用于治疗设备10的控制信号,特别是用于控制患者接口2的控制信号。
53.图6以示意性侧视图示出了在患者接口2的对接程序中的眼睛3。特别地,患者接口2对接至眼睛3的角膜顶点15。特别地,角膜顶点15被移位至光轴4。在图6中,特别地示出了患者接口2被配置为电绝缘的和/或无菌的,使得电压不能从患者接口2过渡到眼睛3。特别地,细菌也不能从患者接口2转移到眼睛3。
54.此外,图6示出了在对接程序之后,通过患者接口2的抽吸装置16a将眼睛3抽吸并固定到患者接口2上。
55.图7在示意性俯视图中根据图6的侧视图以俯视图示出了具有患者接口2的眼睛3,其中,在此浦肯野图像12a几乎消失了。在对接程序之后,可以评估对接程序之前的光学捕获装置9的最后图像,其中可以在评估中将所捕获的瞳孔位置17与浦肯野图像12a进行比较。此外,可以在对接程序之后评估对接程序之前的光学捕获装置9的最后图像和对接程序之后的光学捕获装置9的第一图像,其中在评估中将所捕获的角膜顶点位置15与浦肯野图像12a进行比较。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1