一种基于轮椅一体化机器人的自动对接分离系统及方法与流程
1.本发明涉及医疗器械设备领域,具体地说是一种基于轮椅一体化机器人的自动对接分离系统及方法。
背景技术:
2.近年来,随着全球老龄化人口数量日益增长,如何提高无法自理老年人、残障人士等行动不便人群的生活品质成为当今社会的重要课题。传统的护理方式需要护理人员协助老年人进行床上活动,以及上、下床移乘辅助,护理人员不但需求量大,还承受着巨大的体力负担。因此,设计一种安全可靠,能辅助无法自理老年人独立进行在床移动,可自动在床起身、上下床及轮椅自动行走的智能床椅设备,对提高老年人生活品质及减轻护理人员负担具有十分重要的意义。
3.全自动智能床椅控制系统中最关键的技术为轮椅和床的自动对接分离操作,能够自动顺利平稳地完成轮椅与床体的对接分离,既能提高无法自理老年人使用者生活自理能力、自我认可度和生活满意度,也同时减轻了护理人员移乘劳动强度。
技术实现要素:
4.为了克服上述的问题,本发明的目的在于提供一种基于轮椅一体化机器人的自动对接分离系统及方法,该系统基于申请日为2015年10月19日,申请号为201510679347.8申请人沈阳新松机器人自动化股份有限公司的一种自动分离对接的床椅一体化机器人,以解决的技术问题是解决行动不便人群从床到轮椅的移乘过程中,通过轮椅与床体的自动对接分离来实现,避免手动搬抬移乘,减少护理人员和使用者的体力及心理负担。
5.本发明为实现上述目的所采用的技术方案是:一种基于轮椅一体化机器人的自动对接分离系统及方法,包括:轮椅侧系统、床体侧系统以及操控系统;
6.所述轮椅侧系统设于轮椅部分上,包括:设于轮椅部分上的主控制器a以及与主控制器a连接的激光导航装置、传感器采集系统a、电机驱动系统a、电缸监控系统a以及电量监控系统;
7.其中,所述轮椅部分装有电机驱动系统a;所述传感器采集系统a和激光导航装置均设于轮椅部分的全方位移动底盘一侧;所述操控系统为手动遥杆,与主控制器a或床体侧系统通信;所述电机驱动系统a上设有监控电机驱动系统a运行状态的电缸监控系统a。
8.所述电机驱动系统包括:抬背电动推杆、曲腿电动推杆、轮椅旋转电动推杆;所述背电动推杆、曲腿电动推杆和轮椅旋转电动推杆均与主控制器连接;所述电缸监控系统a分别与所述背电动推杆、曲腿电动推杆和轮椅旋转电动推杆连接,以监测电动推杆的运行状态。
9.所述激光导航装置为激光传感器。
10.所述传感器采集系统为行程限位传感器。
11.所述床体侧系统包括:主控制器b以及与主控制器b连接的传感器采集系统b、电缸
监控系统b、电机驱动系统b以及充电站系统;
12.主控制器b设于床体部分上,且与操控系统通信;
13.所述床体部分配合轮椅全方位移动底盘处设有对接床板,所述对接床板上安装有传感器采集系统b;所述对接床板上还设有充电站系统,与轮椅部分对接以实现充电。
14.所述电机驱动系统b上还设有监控电机驱动系统b运行状态的电缸监控系统b。
15.所述传感器采集系统b包括多个行程限位传感器,且对接传感器的数量与传感器采集系统a的数量相同,且位置对应。
16.所述电机驱动系统a还包括多个驱动轮电机,所述驱动轮电机连有驱动轮,且所述驱动轮电机与主控制器a连接;所述驱动轮,有两个,对称设于全方位移动底盘底部,对应驱动轮还设有两个万向轮以控制轮椅方向。
17.所述电缸监控系统a和电缸监控系统b均为霍尔位置传感器。
18.一种基于轮椅一体化机器人的自动对接分离方法,包括以下步骤:
19.1)通过操控系统操控轮椅运动至对接床板对应的对接区域处,激光导航装置扫描床体部分进行定位,得到床椅合并完成时轮椅部分的目标点,即对接初始位置信息;
20.2)主控制器a将对接初始位置信息发送至电机驱动系统a电机驱动系统首先控制轮椅部分自动行进到对接初始位置;
21.3)轮椅行进到对接初始位置后,主控制器a通过电机驱动系统a控制轮椅背板和轮椅腿板放平,控制两侧扶手下放,轮椅部分的全方位移动底盘上方的座椅俯视逆时针旋转90
°
;
22.4)对接开始,轮椅向床体行进,电机驱动系统a控制两个驱动轮的运动速度,直到对接传感器触发,轮椅部分停止运动,驱动轮电机抱闸开启,对接完成;
23.5)使用者通过操控系统通过控制电机驱动系统b将所有床板放置水平,执行自动分离操作,轮椅部分脱离床体运动到指定位置,轮椅部分的全方位移动底盘上的座椅部分顺时针旋转90
°
,两侧扶手自动升起,轮椅背板、轮椅腿板自动运动调整为坐姿姿态,分离完成;
24.6)完成分离后,操控系统获得轮椅部分操控权限,此时可通过摇杆手动控制轮椅行走。
25.所述步骤1)具体为:
26.激光导航装置通过扫描床体侧对接床板建立区域地图,通过激光slam的绝对姿态估计法,与主控制器a内存储的地图进行对比匹配,实现轮椅部分在区域地图内的定位,利用中值滤波算法消除区域地图内的噪点,即得到对接初始位置。
27.本发明具有以下有益效果及优点:
28.本发明通过自动对接分离智能控制系统将轮椅自动与床体对接和分离,取代了护理人员的手动移乘操作,降低护理人员体力负担,提高了护理效率与护理质量,同时也提升了行动不便使用者的生活品质。
附图说明
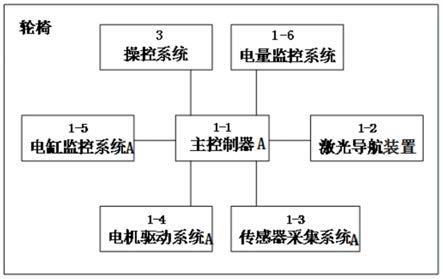
29.图1为本发明的轮椅侧控制系统组成框图;
30.图2为本发明的床体侧控制系统组成框图;
31.图3为本发明的床体部分、轮椅部分结构轮廓简图;
32.图4为本发明的床椅对接过程流程图;
33.图5为本发明的床椅分离过程流程图;
34.图6为本发明的轮椅对接激光所在区域示意图;
35.其中:1
‑
1为主控制器a,1
‑
2为激光导航装置,1
‑
3为传感器采集系统a,1
‑
4为电机驱动系统a,1
‑
5为电缸监控系统a,1
‑
6为电量监控系统,2
‑
1为主控制器b,2
‑
2为传感器采集系统b,2
‑
3为电缸监控系统b,2
‑
5为充电站系统,3为操控系统。
具体实施方式
36.下面结合附图及实施例对本发明做进一步的详细说明。
37.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但本发明能够以很多不同于在此描述的其他方式来实施,本领域技术人员可以在不违背发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
38.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
39.本实施例结合申请号201510679347.8的一种自动分离对接的床椅一体化机器人,提出了一种基于轮椅一体化机器人的自动对接分离系统及方法,具体如下:
40.如图1所示,为本发明的轮椅侧控制系统组成框图;包括:轮椅侧系统、床体侧系统以及操控系统;
41.轮椅侧系统设于轮椅部分上,包括:设于轮椅部分上的主控制器a1
‑
1以及与主控制器a1
‑
1连接的激光导航装置1
‑
2、传感器采集系统a1
‑
3、电机驱动系统a1
‑
4、电缸监控系统a1
‑
5以及电量监控系统1
‑
7;
42.在申请号201510679347.8的一种自动分离对接的床椅一体化机器人中,轮椅部分包括全方位移动底盘以及顺次连接的轮椅背部框架、轮椅曲腿机构框架、轮椅腿部框架和轮椅脚板框架形成轮椅整体框架,且轮椅整体框架上装有电机驱动系统104;传感器采集系统103和激光导航装置102均设于轮椅部分的全方位移动底盘一侧;
43.其中,轮椅部分装有电机驱动系统a1
‑
4;传感器采集系统a1
‑
3和激光导航装置1
‑
2均设于轮椅部分的全方位移动底盘一侧;操控系统为手动遥杆,与主控制器a1
‑
1或床体侧系统通信;电机驱动系统a1
‑
4上设有监控电机驱动系统a1
‑
4运行状态的电缸监控系统a1
‑
5。
44.电机驱动系统1
‑
4包括:抬背电动推杆、曲腿电动推杆、轮椅旋转电动推杆;所述背电动推杆、曲腿电动推杆和轮椅旋转电动推杆均与主控制器1
‑
1连接,所述电缸监控系统a1
‑
5分别与所述背电动推杆、曲腿电动推杆和轮椅旋转电动推杆连接,以监测电动推杆的运行状态。
45.激光导航装置1
‑
2为激光传感器。
46.传感器采集系统1
‑
3为行程限位传感器。
47.床体侧系统包括:主控制器b2
‑
1以及与主控制器b2
‑
1连接的传感器采集系统b2
‑
2、电缸监控系统b2
‑
3、电机驱动系统b2
‑
4以及充电站系统2
‑
5;
48.主控制器b2
‑
1设于床体部分上,且与操控系统通信;
49.如图2所示,为本发明床体侧控制系统组成框图,在申请号201510679347.8的一种自动分离对接的床椅一体化机器人中,床体整体框架上装有电机驱动系统b,电机驱动系统b包括左侧翻身电动推杆、右侧翻身电动推杆以及床体曲腿电动推杆;左侧翻身电动推杆、右侧翻身电动推杆以及床体曲腿电动推杆均与主控制器b连接;
50.床体部分配合轮椅全方位移动底盘处设有对接床板,对接床板上安装有传感器采集系统b2
‑
2;对接床板上还设有充电站系统2
‑
5,与轮椅部分对接以实现充电。
51.电机驱动系统b2
‑
3上还设有监控电机驱动系统b2
‑
3运行状态的电缸监控系统b2
‑
3。
52.传感器采集系统b2
‑
2包括多个行程限位传感器,且对接传感器的数量与传感器采集系统a1
‑
3的数量相同,且位置对应。
53.电机驱动系统a1
‑
4还包括多个驱动轮电机,驱动轮电机连有驱动轮,且所述驱动轮电机与主控制器a1
‑
1连接;驱动轮,有两个,对称设于全方位移动底盘底部,对应驱动轮还设有两个万向轮以控制轮椅方向。
54.电缸监控系统a1
‑
5和电缸监控系统b2
‑
3均为霍尔位置传感器。
55.如图3所示床体的外形结构轮廓简图,床体侧固定不动,轮廓a
‑
f的床体外观为轮椅对接过程中激光传感器扫描区域,进行轮椅对接前的定位。轮廓c
‑
d区域装有对接传感器,用于检测轮椅对接完成。只有对接传感器触发确认对接完成后,床体主控制器b2
‑
1才开启床侧电机驱动系统b2
‑
3,此时通过按键手柄进行床体的左翻身、右翻身、抬腿等操作。
56.如图3所示轮椅的外形结构简图,轮椅的底盘与上方的座椅部分具有可相对90
°
旋转结构。底盘后方安装激光传感器,用于对接过程检测区域轮廓进行轮椅定位。底盘后方装有对接传感器检测用于检测对接完成。轮椅侧对接传感器触发后,轮椅侧控制器会禁用轮椅侧电缸驱动系统、操控系统,无法手动控制轮椅抬背、曲腿、轮椅旋转等操作。
57.如图4位对接过程流程图,轮椅控制系统内存有床椅对接区域的高精度地图。使用者通过扶手摇杆操控轮椅行进至对接区域,如图6所示,需保证轮椅底盘后侧的激光传感器位于图示区域内。执行自动对接操作,激光导航系统通过扫描床体侧对接外观床板建立区域地图,通过激光slam的绝对姿态估计方法,与系统内存储的高精度地图进行对比匹配,实现轮椅在区域地图内的定位,利用中值滤波算法消除区域地图内的噪点。通过电机驱动系统首先控制轮椅自动行进到对接初始位置。
58.轮椅行进到对接初始位置后,控制器通过电缸驱动系统控制轮椅背板、腿板放平,两侧扶手下放,轮椅底盘上方的座椅俯视逆时针旋转90
°
。
59.主控制器根据地图对比结果,计算出床椅合并完成时轮椅的目标点,并计算出自动对接运动的运动学模型。对接开始,轮椅向床体行进,控制系统根据运动学模型控制两个驱动轮的运动速度,直到对接传感器触发,轮椅停止运动,驱动轮电机抱闸开启,对接完成。在对接行进过程中,控制器实时对比轮椅行进轨迹与运动学模型,同时通过激光实时检测轮椅与床体的距离,若发生轨迹偏离,控制器利用激光导航差速纠偏算法,调整两个驱动轮的运动速度进行轨迹纠正,保证轮椅最终顺利对接成功。轮椅触发对接限位传感器后,停止运动,对接完成。
60.如图5为分离过程流程图,使用者先手动操作将所有床板放置水平,执行自动分离操作,轮椅脱离床体运动到指定位置,轮椅底盘上方的座椅部分俯视顺时针旋转90
°
,两侧扶手自动升起,轮椅背板、腿板自动运动调整为坐姿姿态,分离完成。
61.完成分离后,轮椅操控系统获得使用权限,此时可通过摇杆手动控制轮椅行走。
62.本发明提出的一种双轮差动轮椅与床的自动对接分离方法,该床椅具有自动对接分离功能、抬背、抬腿、自动扶手等多重功能,可以满足身体行动不便使用者的使用需求,功能多样,安全性高。
63.以上所述仅为本发明的实施方式,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内所作的任何修改、等同替换、改进、扩展等,均包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1