一种手部康复用气动手套的制作方法
1.本实用新型涉及一种康复器械,具体是一种气动手部康复用气动手套。
背景技术:
2.中风或肌无力患者早起恢复对其很重要,通过使用经过验证的高效促进康复的机器人,可以有效地整合上肢损伤的传统方法,其中实现治疗的关键执行部分就是患者使用的手套结构。
3.通常,患者在物理治疗师或职业治疗师的指导下在专门的康复中心进行康复锻炼。然而,由于患者人数增加,预计物理治疗师将缺乏协助康复过程。因此,将会有相对较少的治疗时间,这最终将导致患者的恢复过程较慢。在过去的十年中,机器人技术的发展促进了康复过程,并显示出帮助患者日常生活的潜力。这种装置的一个例子是手外骨骼,其固定在手周围以引导和辅助被包围的关节的运动。然而,由于手的复杂性,设计手外骨骼仍然是一项具有挑战性的任务。传统的手外骨骼涉及使用基于刚性连杆的机制。在这种机构中,通常涉及刚性部件,例如线性致动器,旋转电机,齿条和小齿轮以及刚性连杆。为了辅助具有高自由度(dof)的手部运动,传统的外骨骼可以与大量的致动器结合以实现该要求。然而,这意味着由于较高dof的体积增大,它们的应用受到限制。因此,这些装置通常在临床环境中受到限制并且不适合进行家庭治疗。另外,它们的刚度,重量和对接头的非致动dof的约束造成复杂性。结果,降低了患者的舒适度和安全性。鉴于此,显然需要开发可用于临床和家庭环境的外骨骼。
4.可穿戴机器人外骨骼的开发有助于提供满足这种需求的替代方法。可穿戴外骨骼不是使用刚性连杆作为手和致动器之间的接口,而是通常使用柔软的材料,如织物和软充气执行器,因此,与基于刚性连杆的机构相比,它们更加柔顺和轻便。基于电缆驱动的外骨骼涉及使用连接到远离手的电动机形式的致动器的电缆。通过在手背侧和手掌侧提供动作,双向电缆驱动运动是可能的。这些电缆模仿人手的肌腱的能力,并且它们能够传递所需的拉力以引起手指弯曲和伸展。然而,由于不同的手尺寸,电缆的摩擦,肌腱的脱轨以及电缆的不准确布线会影响系统中力传递的效率。同时,辅助设备的紧凑性和易用性严重影响其用户接受度。
技术实现要素:
5.为了克服上述现有技术中外骨骼结构中存在效率低、用户使用不便等缺陷,本实用新型提供一种气动手套,实现对中风患者手部康复效率高和使用便捷的效果。
6.本实用新型涉及的一种手部康复用气动手套,包括手套主体结构、传动部件、气动部件和控制部件,其中传动部件和气动部件均固定在手套主体结构上。
7.进一步,所述手套主体结构包括手背贴合部分、手掌部固定带和手腕部固定带,传动部件包括手指部件和传导部件,气动部件包括气动部件主体和气动传输部件。
8.进一步,所述手指部件包括手指关节部件、指关节贴合部件、远端指关节贴合固定
部件、指关节固定带;传导部件包括近端掌指关节连接部件、指关节连接运动部件、中端指关节力传导支撑杆、近端指关节力传导支撑杆、中段力传导杆、力传导支撑杆固定和活动部件和近端力传导杆。
9.进一步,气动部件主体包括气动部件主体和气动部件加固结构,气动传输部件包括气动装置推进杆、气动装置电源连接处、气动部件底座和拇指部分气动装置。
10.进一步,控制部件与手套主体结构可拆卸连接,控制部件包括可拆卸电源结构、肌电感应装置、五个气压传感器、微控制器、五个微型电磁阀、电脑传输接口。
11.进一步,微控制器调节测量的空气压力以跟踪所需的压力和使用的脉冲宽度调制,以根据压力传感器的读数控制阀门和泵的启动和停用。
12.进一步,微控制器采用比例积分微分控制算法用于确保致动器的测量气压接近期望的气压。比例积分微分控制算法的控制方案在微控制器上实现,采样频率为100 hz,阀门的标称响应时间为20 ms,pwm频率为50 hz,控制参数选择为kp= 10,ki= 0.7,并且kd= 0.1,将期望压力pref设定为120kpa,其是基于rom测试的结果对应于全手指弯曲的压力,用于食指的加压从0
‑
120kpa,闭环系统的上升时间为1.36秒,稳定时间,为1.63秒。
13.进一步,手套主体结构和手指关节部件采用轻质材料,主体结构和手指关节部件中连接结构采用可拆卸固定结构连接,传动部件采用轻质合金材质。
14.进一步,轻质材料为塑料,可拆卸固定结构为铆钉连接。
15.进一步,手背贴合部分连接贴合层,指关节贴合部件包括贴合层,贴合层的长度与一般手指的长度一致。
16.进一步,贴合层为波纹织物层连接弹性织物层。
17.进一步,贴合层为布料衬垫缝合或者粘结海绵层。
18.进一步,手掌部固定带、手腕部固定带和指关节固定带均采用可拆卸重复使用结构。
19.进一步,可拆卸重复使用结构为魔术贴或胶带。
20.进一步,气动部件主体包括可拆卸的微型隔膜气动泵,提供气体动力,可拆卸电源结构为12 v可充电锂聚合物电池,提供电力。
21.进一步,整体手套重量控制在1500g
‑
2500g之间,最优的重量是1700g或2000g。
22.进一步,控制部件还可以通过电脑传输接口与电脑连接。
23.进一步,电脑内设置控制模块和ai模块,通过采集多个不同患者的使用数据,分析和深度学习输出和反馈的参数,通过学习得出不同患者类型对应的治疗方案,ai模块主要采用torch学习方法或梯度下降算法,控制模块根据ai模块提供的控制方式,实现对手套的智能控制。
24.有益效果主要是能够给中锋肌无力或中风患者提供一个可穿戴式的手套结构,方便患者使用和操作,因为本手套集成度较高,各零部件选择均采用小型化设备,目的是为了减少手套的重量,避免给患者带来负担和二次的伤害,同时,采用自动化程度较高的微处理器,实现对手套的自我控制,还包括与患者皮肤较为贴合的设计,使患者在使用过程中整体效果加以提升,并且避免患者长时间使用导致手部出现过敏或者受伤的情况的发生。还有本技术的技术方案可以通过电脑连接结构与电脑连接,并于电脑中的ai模块实现互通,将数据交于ai模块进行深度学习,通过ai模块的深度学习,实现对不同患者的差异化对待,提
高整体康复的科学性和针对性。
附图说明
25.附图1为整体组成示意图;
26.附图2为整体手套的示意图1;
27.附图3为整体手套的示意图2;
28.附图4为整体手套的示意图3;
29.附图5为整体手套的示意图4;
30.附图6为整体手套的示意图5;
31.附图7为控制部件连接图。
具体实施方式
32.下面将详细描述本实用新型的具体实施例,应当注意,这里描述的实施例只用于举例说明,并不用于限制本实用新型。在以下描述中,为了提供对本实用新型的透彻理解,阐述了大量特定细节。然而,对于本领域普通技术人员显而易见的是:不必采用这些特定细节来实行本实用新型。在其他实例中,为了避免混淆本实用新型,未具体描述公知的电路、材料或方法。
33.在整个说明书中,对“一个实施例”、“实施例”、“一个示例”或“示例”的提及意味着:结合该实施例或示例描述的特定特征、结构或特性被包含在本实用新型至少一个实施例中。因此,在整个说明书的各个地方出现的短语“在一个实施例中”、“在实施例中”、“一个示例”或“示例”不一定都指同一实施例或示例。此外,可以以任何适当的组合和/或子组合将特定的特征、结构或特性组合在一个或多个实施例或示例中。
34.应当理解,当称元件“耦接到”或“连接到”另一元件时,它可以是直接耦接或连接到另一元件或者可以存在中间元件。相反,当称元件“直接耦接到”或“直接连接到”另一元件时,不存在中间元件。
35.此外,这里使用的术语“和/或”包括一个或多个相关列出的项目的任何和所有组合。
36.将理解的是,与术语相应的单数形式的名词可包括一个或更多个事物,除非相关上下文另有明确指示。如这里所使用的,诸如“a或b”、“a和b中的至少一个”、“a或b中的至少一个”、“a、b或c”、“a、b和c中的至少一个”以及“a、b或c中的至少一个”的短语中的每一个短语可包括在与所述多个短语中的相应一个短语中一起列举出的项的所有可能组合。如这里所使用的,诸如“第1”和“第2”或者“第一”和“第二”的术语可用于将相应部件与另一部件进行简单区分,并且不在其它方面(例如,重要性或顺序)限制所述部件。
37.如这里所使用的,术语“模块”可包括以硬件、软件或固件实现的单元,并可与其他术语(例如,“逻辑”、“逻辑块”、“部分”或“电路”)可互换地使用。模块可以是被适配为执行一个或更多个功能的单个集成部件或者是该单个集成部件的最小单元或部分。例如,根据实施例,可以以专用集成电路(asic)的形式来实现模块。
38.应该理解的是,本公开的各种实施例以及其中使用的术语并不意图将在此阐述的技术特征限制于具体实施例,而是包括针对相应实施例的各种改变、等同形式或替换形式。
除非本文另有明确定义,否则所有术语将给出其最广泛的可能解释,包括说明书中暗示的含义以及本领域技术人员理解的和/或字典、论文等中定义的含义。
39.此外,本领域普通技术人员应当理解,在此提供的附图都是为了说明的目的,并且附图不一定是按比例绘制的。对于附图的描述,相似的参考标号可用来指代相似或相关的元件。以下将参考附图对本公开进行示例性描述。
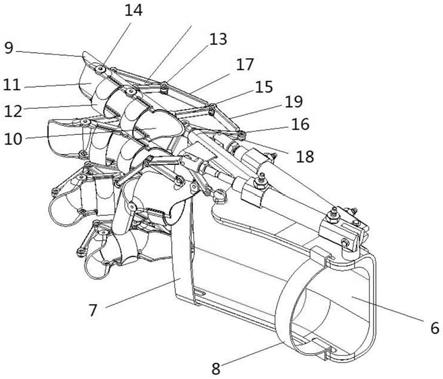
40.本实用新型涉及的一种手部康复用气动手套1,包括手套主体结构2、传动部件3、气动部件4和控制部件5。其中传动部件和气动部件均固定在手套主体结构上。手套主体主要为了固定手掌和支撑气动结构和连接手指灯其他结构,手套主体结构一般也采用轻质材质。同时,所述手套主体结构包括手背贴合部分6、手掌部固定带7和手腕部固定带8,传动部件包括手指部件和传导部件,气动部件包括气动部件主体和气动传输部件。所述手指部件包括手指关节部件9、指关节贴合部件10、远端指关节贴合固定部件11、指关节固定带12;传导部件包括近端掌指关节连接部件13、指关节连接运动部件14、中端指关节力传导支撑杆15、近端指关节力传导支撑杆16、中段力传导杆17、力传导支撑杆固定和活动部件18和近端力传导杆19。
41.气动部件主体包括气动部件主体和气动部件加固结构,气动传输部件包括气动装置推进杆、气动装置电源连接处、气动部件底座和拇指部分气动装置。控制部件5包括可拆卸电源结构20、肌电感应装置21、五个气压传感器22、微控制器23、五个微型电磁阀24、电脑传输接口25。
42.在一个实施例中,微控制器调节测量的空气压力以跟踪所需的压力和使用的脉冲宽度调制,以根据压力传感器的读数控制阀门和泵的启动和停用。微控制器采用比例积分微分控制算法用于确保致动器的测量气压接近期望的气压。比例积分微分控制算法的控制方案在微控制器上实现,采样频率为100 hz,阀门的标称响应时间为20 ms,pwm频率为50 hz,控制参数选择为kp= 10,ki= 0.7,并且kd= 0.1,将期望压力pref设定为120kpa,其是基于rom测试的结果对应于全手指弯曲的压力,用于食指的加压从0
‑
120kpa,闭环系统的上升时间为1.36秒,稳定时间,为1.63秒。
43.微控制器采用arduin的arduino mega系列,微型隔膜气动泵采用美国parker 公司的d737
‑
23
‑
01型号产品,微型电磁阀采用美国parker 公司的x
‑
valve型号产品,气压传感器采用美国飞思卡尔公司的mpx5500dp型号产品。
44.在一个实施例中,手套主体结构和手指关节部件采用轻质材料,主体结构和手指关节部件中连接结构采用可拆卸固定结构连接,传动部件采用轻质合金材质。轻质材料为塑料,可拆卸固定结构为铆钉连接。手背贴合部分连接贴合层,指关节贴合部件包括贴合层,贴合层的长度与一般手指的长度一致。贴合层为波纹织物层连接弹性织物层。贴合层为布料衬垫缝合或者粘结海绵层。手掌部固定带、手腕部固定带和指关节固定带均采用可拆卸重复使用结构。可拆卸重复使用结构为魔术贴或胶带。
45.在一个实施例中,气动部件主体包括微型隔膜气动泵,提供气体动力,可拆卸电源结构为12 v可充电锂聚合物电池,提供电力。整体手套重量控制在2000g
‑
3500g之间,最优的重量是2700g或3000g。
46.在一个实施例中,控制部件还可以通过电脑传输接口与电脑连接。电脑内设置ai模块,通过采集多个不同患者的使用数据,分析和深度学习输出和反馈的参数,通过学习得
出不同患者类型对应的治疗方案,ai模块主要采用pytorch学习方法或梯度下降算法。
47.其中,pytorch学习方法主要是通过卷积层
‑
relu层
‑
池化层
‑
全连接层
‑
relu层
‑
全连接层这个学习进行学习。
48.整个手套的工作流程是患者通过固定带将手指和手掌部位固定,医护人员开启电源,气动装置气动,如果不连接电脑的情况下,气动装置根据气压传感器提供的数据,结合患者自身的治疗需要,事先将数据写入微处理器,微处理器根据患者情况以及压力传感器提供的情况,实时调整整个手套的工作情况,为患者提供康复所需的具体动作和压力。
49.如果是连接电脑的情况,就需要将电脑连接结构与电脑相连,通过电脑内置的控制模块实现对其控制,其中的ai模块需要采集大量的患者数据,最好的方式是将多个手套的使用数据整合在一起,并将数据发送到电脑,通过ai模块进行深度学习,通过学习得出最合适患者的康复方案,并能够根据现场反馈的压力数据情况,得出最优的手套控制方案。
50.同时,为了防止手套压力过大,伤害到患者的情况发生,手套的气动结构位置设置紧急泄气结构,如果发生压力过大,患者出现不适的情况,患者、家人或者医生可以通过泄气结构实现气动压力的快速降压,保障患者的使用安全。该泄气结构为泄压阀或者泄压口结构。
51.尽管以上各个框图中示出了多个组件,但是本领域技术人员应当理解,可以在缺少一个或多个组件或将某些组件组合的情况下实现本实用新型的实施例。
52.尽管以上根据附图中所示的顺序对各个步骤进行了描述,但是本领域技术人员应当理解,所述各个步骤可以按照不同的顺序执行,或者可以在没有上述步骤中的一个或多个步骤的情况下实现本实用新型的实施例。
53.根据前述内容可以理解,一个或多个系统或设备的电子组件可以包括但不限于至少一个处理单元、存储器、以及将包括存储器在内的各个组件耦接到处理单元的通信总线或通信装置。系统或设备可以包括或可以访问各种设备可读介质。系统存储器可以包括易失性和/或非易失性存储器形式的设备可读存储介质(比如,只读存储器(rom)和/或随机存取存储器(ram))。通过示例而非限制的方式,系统存储器还可以包括操作系统、应用程序、其它程序模块和程序数据。
54.实施例可以实现为系统、方法或程序产品。因此,实施例可以采用全硬件实施例或者包括软件(包括固件、常驻软件、微代码等)的实施例的形式,它们在本文中可以统称为“电路”、“模块”或“系统”。此外,实施例可以采取在其上体现有设备可读程序代码的至少一个设备可读介质中体现的程序产品的形式。
55.可以使用设备可读存储介质的组合。在本文档的上下文中,设备可读存储介质(“存储介质”)可以是任何有形的非信号介质,其可以包含或存储由配置为由指令执行系统、装置或设备使用或与其结合使用的程序代码组成的程序。出于本公开的目的,存储介质或设备应被解释为非暂时性的,即不包括信号或传播介质。
56.本公开出于说明和描述的目的得以呈现,但是并非旨在穷举或限制。许多修改和变化对于本领域普通技术人员将是明显的。选择和描述实施例以便说明原理和实际应用,并且使得本领域普通技术人员能够理解具有适合于所预期的特定用途的各种修改的本公开的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1