一种智能辅助康复的外骨骼的制作方法
1.本实用新型涉及辅助康复技术领域,特别涉及为一种智能辅助康复的外骨骼。
背景技术:
2.外骨骼是一种能够提供对生物柔软内部器官进行构型,建筑和保护的坚硬的外部结构,其可以增强人体行动能力、减轻负重,最初旨在帮助患有多发性硬化症、严重关节炎等疾病的群体克服行动困难;
3.在生活中,许多患者由于脚部受伤而导致行动不便,而普通的康复器械也仅只限于固定患者的受伤部位,并不能辅助患者在受伤时行动,这对患者的行动就造成了诸多不便;
4.为此,有必要提出一种智能辅助康复的外骨骼来解决这一受伤患者行动不便的问题。
技术实现要素:
5.本实用新型提出一种智能辅助康复的外骨骼,更加确切地解决上述受伤患者行动不便的问题。
6.本实用新型为解决技术问题采用如下技术手段:
7.一种智能辅助康复的外骨骼,包括两个固定板、第一连接件和第二连接件、踏板、第一传动杆、第二传动杆、第一连接杆和第二连接杆,所述第一连接件上设有第一滑动槽,所述第二连接件上设有第二滑动槽;
8.所述固定板与所述踏板活动连接,所述踏板能够相对于所述固定板进行转动,所述第一传动杆的一端与所述第一连接件活动连接,所述第一传动杆能够相对于所述第一连接件进行滑动,所述第一传动杆的另一端与所述第一连接杆的一端活动连接,所述第一连接杆的另一端与所述踏板活动连接,所述第二传动杆的一端与所述第二连接件活动连接,所述第二传动杆能够相对于所述第二连接件滑动,所述第二传动杆的另一端与所述第二连接杆的一端活动连接,所述第二连接杆的另一端与所述踏板活动连接,两个所述固定板相互平行,所述第一连接件固定于两个所述固定板的一侧,所述第二连接件固定于两个所述固定板的另一侧;
9.所述第一滑动槽贯穿所述第一连接件,所述第二滑动槽贯穿所述第二连接件,所述第一传动杆收容于所述第一滑动槽内,所述第二传动杆收容于所述第二滑动槽内。
10.进一步的,所述踏板上包括第三连接件和第四连接件,所述第三连接件与所述第四连接件分别固定于所述踏板的同一平面上,所述第三连接件与所述第一连接杆活动连接,所述第四连接件与所述第二连接杆活动连接。
11.进一步的,所述智能辅助康复的外骨骼包括第一驱动装置、第二驱动装置和固定环,所述固定环与所述固定板固定连接,所述第一驱动装置固定于所述固定环的一端,所述第一驱动装置与所述第一传动杆活动连接,所述第一驱动装置转动能够带动所述第一推动
杆滑动,所述第二驱动装置固定于所述固定环的另一端,所述第二驱动装置与所述第二传动杆活动连接,所述第二驱动装置转动能够带动所述第二传动杆滑动。
12.进一步的,所述第一驱动装置上设有第一推动杆,所述第一连接杆上设有第一推动槽,所述第一推动杆收容于所述第一推动槽内。
13.进一步的,所述第二驱动装置上设有第二推动杆,所述第二连接杆上设有第二推动槽,所述第二推动杆收容于所述第二推动槽内。
14.进一步的,所述智能辅助康复的外骨骼包括主控芯片,所述主控芯片与所述固定板固定连接,所述主控芯片分别与所述第一驱动装置和所述第二驱动装置电连接。
15.进一步的,所述智能辅助康复的外骨骼包括震动传感器,所述震动传感器与所述主控芯片电连接。
16.进一步的,所述震动传感器内设有导电片和导电丝,所述导电片的一端与所述主控芯片电连接,所述导电丝的一端与所述主控芯片电连接,所述导电丝与所述导电片之间有间隙。
17.进一步的,所述智能辅助康复的外骨骼包括连接套,所述连接套与所述固定环固定连接,所述连接套部分收容于所述固定环内。
18.进一步的,所述智能辅助康复的外骨骼包括电池,所述电池与所述主控芯片电连接。
19.本实用新型提供了智能辅助康复的外骨骼,具有以下有益效果:
20.所述智能辅助康复的外骨骼能够辅助脚部受伤患者行走,给脚部受伤的患者提供了一个能够自由活动的机会,另外,辅助运动中,外部提供的活动力也能够增强患者受伤脚踝的一个自我修复能力,已达到一个物理理疗的效果。
附图说明
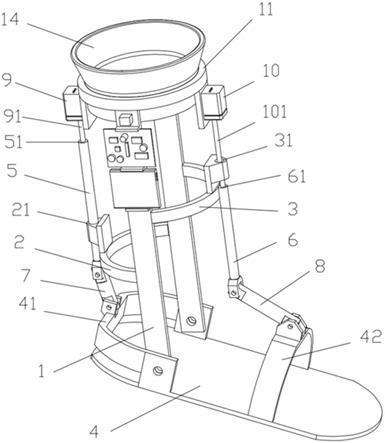
21.图1为本实用新型智能辅助康复的外骨骼一个实施例的一个整体结构示意图;
22.图2为本实用新型智能辅助康复的外骨骼一个实施例的另一个整体结构示意图;
23.图3为本实用新型智能辅助康复的外骨骼的震动传感器内部示意图。
24.本实用新型为目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
25.应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
26.下面将结合本实用新型的实施例中的附图,对本实用新型的实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
27.需要说明的是,本实用新型的说明书和权利要求书及上述附图中的术语“包括”、“包含”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包
括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其他步骤或单元。在本实用新型的权利要求书、说明书以及说明书附图中的术语,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体/操作/对象与另一个实体/操作/对象区分开来,而不一定要求或者暗示这些实体/操作/对象之间存在任何这种实际的关系或者顺序。
28.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本实用新型的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其他实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其他实施例相结合。
29.参考附图1
‑
3,本实用新型一实施例中的智能辅助康复的外骨骼,包括两个固定板1、第一连接件2和第二连接件3、踏板4、第一传动杆5、第二传动杆6、第一连接杆7和第二连接杆8,第一连接件2上设有第一滑动槽21,第二连接件3上设有第二滑动槽31;固定板1与踏板4活动连接,踏板4能够相对于固定板1进行转动,第一传动杆5的一端与第一连接件2活动连接,第一传动杆5能够相对于第一连接件2进行滑动,第一传动杆5的另一端与第一连接杆7的一端活动连接,第一连接杆7的另一端与踏板4活动连接,所述第二传动杆6的一端与第二连接件3活动连接,第二传动杆6能够相对于第二连接件3进行滑动,第二传动杆6的另一端与第二连接杆8的一端活动连接,第二连接杆8的另一端与踏板4活动连接,两个固定板1相互平行,第一连接件2固定于两个固定板1的一侧,第二连接3件固定于两个固定板1的另一侧;第一滑动槽21贯穿第一连接件2,第二滑动槽31贯穿第二连接件3,第一传动杆5收容于第一滑动槽21内,第二传动杆6收容于第二滑动槽31内;踏板4上包括第三连接件41和第四连接件42,第三连接件41与第四连接件42分别固定于踏板4的同一平面上,第三连接件41与第一连接杆7活动连接,第四连接件42与第二连接杆8活动连接;智能辅助康复的外骨骼包括第一驱动装置9、第二驱动装置10和固定环11,固定环11与固定板1固定连接,第一驱动装置9固定于固定环11的一端,第一驱动装置9与第一传动杆5活动连接,第一驱动装置9转动能够带动第一传动杆5滑动,第二驱动装置10固定于固定环11的另一端,第二驱动装置10与第二传动杆6活动连接,第二驱动装置10转动能够带动第二传动杆6滑动;第一驱动装置9上设有第一推动杆91,第一传动杆5上设有第一推动槽71,第一推动杆91收容于第一推动槽71内;第二驱动装置10上设有第二推动杆101,第二传动杆6上设有第二推动槽81,第二推动杆101收容于第二推动槽81内。
30.在本实施方式中:
31.两个固定板1用于支撑患者行走时小腿向下的压力;
32.第一连接件2用于保护患者小腿,同时也给第一传动杆5一个连接位;
33.第二连接件3用于保护患者小腿,同时也给第二传动杆6一个连接位;
34.第一传动杆5用于传递动力给第一连接杆7;
35.第一连接杆7用于将第一传动杆5的动力传递给踏板4;
36.第二传动杆6用于传递动力给第二连接杆8;
37.第二连接杆8用于将第二传动杆6的动力传递给踏板4;
38.踏板4用于给患者提供一个脚掌放置的地方;
39.第一驱动装置9用于给第一传动杆5传递动力;
40.第二驱动装置10用于给第二传动杆6传递动力;
41.固定环11用于固定第一驱动装置9和第二驱动装置10;
42.第一推动杆91为第一驱动装置9上带有螺纹的转子;
43.第二推动杆101为第二驱动装置10上带有螺纹的转子;
44.第一推动槽51内有与第一推动杆91上匹配的内螺纹;
45.第二推动槽61内有与第二推动杆101上匹配的内螺纹;
46.具体为,固定环10固定在患者受伤的膝盖上,第一驱动装置9带动第一推动杆91在第一推动槽51内转动,由于第一推动杆91上的螺纹与第一推动槽51内的螺纹匹配,所以第一推动杆91的转动能够带动第一传动杆5在第一滑动槽21内上下滑动,而第一传动杆5的上下滑动则能够带动第一连接杆7的上下摆动,由于第一连接杆7的一端固定在踏板4上的第三连接件41上,所以,第一连接杆7的上下摆动则能够带动踏板4摆动;
47.与此同时,第二驱动装置10带动第二推动杆101在第一推动槽61内转动,由于第二推动杆101上的螺纹与第一推动槽61内的螺纹匹配,所以第二推动杆101能够带动第二传动杆6在第二滑动槽31内上下滑动,而第二传动杆6的上下滑动则能够带动第二连接杆8的上下摆动,由于第二连接杆8的一端固定在了踏板4的第四连接件42上,所以,第二连接杆8的上下摆动能够带动踏板4摆动;
48.在这里,第二驱动装置10带动第二推动杆101转动的方向始终与第一驱动装置9带动第一推动杆91的转动方向相反,即在第一推动杆91转动带动第一传动杆5向下运动时,第二推动杆101则转动带动第二传动杆6向上运动,从而共同带动踏板4往一个方向摆动,踏板4的摆动则模拟了患者走动时脚掌的摆动过程,使得,患者的行动能够更加的灵活。
49.综上所述,智能辅助康复的外骨骼能够有效、便捷地解决脚部受伤的患者行动不便的问题。
50.进一步的,智能辅助康复的外骨骼包括主控芯片12,主控芯片12与固定板1固定连接,主控芯片12分别与第一驱动装置9和第二驱动装置10电连接;智能辅助康复的外骨骼包括震动传感器13,震动传感器13与主控芯片12电连接。
51.在本实施方式中:
52.主控芯片12用于处理震动传感器13回传的数据和控制第一驱动装置9与第二驱动装置10的运动速率和方向。
53.第一驱动装置9与第二驱动装置10分别通过外部导电线与主控芯片12电连接。
54.震动传感器13用于给主控芯片12传导患者行走的参数。
55.进一步的,震动传感器13内设有导电片131和导电丝132,导电片131的一端与主控芯片12电连接,导电丝132的一端与主控芯片12电连接,导电丝132与导电片131之间有间隙。
56.在本实施方式中:
57.导电片131为硬性导电材料。
58.导电丝132为弹性导电材料。
59.在患者行走时,行走的脚步产生的震动能够使震动传感器13内的导电丝132摆动,而导电丝132的摆动则能够触碰到导电片131,当导电丝132触碰到导电片131时导通,电流从主控芯片12流出至导电丝132,导电丝132上的电流则流向导电片131,而导电片131上的
电流又回流主控芯片12,这样则形成了一个回路,这就给了主控芯片12一个信号,当导电丝132没有触碰到导电片131时,回路则断开,这也给了主控芯片12另一个信号,随着患者走路的脚步频率不同,导电丝132与导电片131导通与断开的频率也会不同,主控芯片12能够将其频率地数据进行处理,转换成相应的指令传达到第一驱动装置9与第二驱动装置10上,使第一驱动装置9与第二驱动装置10加快或减慢速度运行,以合理地够匹配患者的走路频率了,使得患者行动更为便捷。
60.进一步的,智能辅助康复的外骨骼包括连接套14,连接套14与固定环10固定连接,连接套14部分收容于固定环10内。
61.在本实施方式中:
62.连接套14为软性材料,用于在患者穿上智能辅助康复的外骨骼走路时给与患者膝盖一个适当的缓冲,减少患者的不舒适感。
63.进一步的,智能辅助康复的外骨骼包括电池15,电池15与主控芯片12电连接。
64.在本实施方式中:
65.电池15用于给主控芯片12供电。
66.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1