一种基于手术机器人的取卵及胚胎培养一体化的装置的制作方法
[0001]
本发明涉及医疗装置领域,具体涉及一种基于手术机器人的取卵及胚胎培养一体化的装置。
背景技术:
[0002]
体外受精-胚胎移植(ivf-et)是临床治疗不孕症最为有效的手段之一,为维护家庭及社会和谐作出了巨大贡献,而取卵及胚胎培养是保证ivf-et成功的重要环节。取卵手术的目标是在最大限度减少患者并发症的基础上,从患者卵巢内通过经阴道穿刺获得足量和优质的卵子用于体外受精;而胚胎培养是在体外通过胚胎体外培养体系实现胚胎类似于体内的正常发育,从获得优质胚胎用于胚胎移植。取卵手术的过程为:患者经控制超促排卵后,卵巢内的卵泡完成发育过程,然后手术者在无菌条件下,通过阴道超声影像的引导,操作取卵针经阴道后穹窿穿刺进入卵巢,将取卵针穿刺入想要获得卵子的卵泡内,启动负压吸引,收集被穿刺卵泡内的卵泡液,然后交由配合手术的辅助人员将收集卵泡液的试管转送至胚胎培养室,由胚胎实验室人员在显微镜下识别出卵子,然后挑选出卵子,用于后续的体外受精及胚胎培养。胚胎培养的过程为:当获得卵子和精子后,在超净工作台内,将卵子及精子放入有胚胎体外培养液的培养皿中,然后将培养皿放入培养箱中进行胚胎培养,期间每天需从培养箱中拿出培养皿观察胚胎发育的过程。
[0003]
目前的取卵手术需要一名手术医生负责穿刺卵泡抽吸卵泡液,然后将抽吸出来的卵泡液交给配合手术的辅助人员,再由辅助人员将收集卵泡液的试管转送至胚胎培养室内,胚胎培养室内人员,再将卵泡液从试管中导入培养皿中识别卵子、挑选卵子用于体外受精及胚胎培养。而胚胎培养需要胚胎实验室人员在开放环境中将卵子及精子放入有胚胎体外培养液的培养皿中,再将培养皿放入培养箱中进行胚胎培养,期间需要每天从培养箱中拿出培养皿观察胚胎发育的过程。所以取卵及胚胎培养的全过程需要取卵术医生熟练操作,同时不能因外界影响晃动阴道超声探头和穿刺针,否则存在将穿刺针穿刺如体内器官的风险;同时取卵手术至少需要3名医务人员的配合才能完成,这种多平台的合作存在配合磨合期,同时占用了大量的空间、人力与物力;另外整个过程中如卵泡液转送、加入卵子与精子至培养名中进行体外受精、运送培养皿至培养及每天将培养皿拿出培养箱外观察胚胎发育等过程中,卵子或胚胎会一定程度地暴露在不利于胚胎发育的温、湿度体外环境中,还合并有污染风险,这是影响胚胎发育的不利因素。
[0004]
综上所述,目前相关技术虽已成熟,但依然有着较大的改进空间。
技术实现要素:
[0005]
本发明的目的是克服现有技术的不足,公开一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统。该基于手术机器人的取卵及胚胎培养一体化的控制装置及系统为目前的取卵手术及胚胎培养提供了一种新手段,在机器人机械臂的辅助下减少手术者因自身或外界因素干扰导致手术并发症的增加,同时让抽吸的卵泡液在不接触外界环境情
况下,直接输入到可通过电子计算机控制的恒温培养箱,有效地避免了传统取卵手术的卵泡液转送这一在不利环境下的暴露过程。同时取卵、识卵、捡卵以及体外受精可以手术室内直接由一名手术者及一名核对者完成。在培养箱中受精后的胚胎直接输入到胚胎培养箱进行培养,在time lapse的帮助下避免了每天将培养皿拿出培养箱外观察胚胎发育所带来的风险,这一系统大大节省了空间和人力,提高了取卵手术及胚胎培养的工作效率及安全性,实现了智能化辅助的取卵及胚胎培养过程。
[0006]
为实现上述目的,本发明提供的技术方案是:
[0007]
一种基于手术机器人的取卵及胚胎培养一体化的装置,包括取卵手术机器人系统、多功能封闭式恒温培养箱和用于显示影像、进行设置与操作的计算机及操作设备;所述的取卵手术机器人系统、多功能封闭式恒温培养系统均与所述的电子计算机及操作设备相连,操作者通过电子计算机及操作设备控制各系统的操作过程;
[0008]
所述的取卵手术机器人系统包括取卵手术机器人、安装在取卵手术机器人上用于取卵操作的取卵机械臂、为取卵手术机器人提供驱动力的动力模块、试剂储存箱及配套冲洗装置;所述的用于取卵操作的机械臂上装配有超声探头和用于取卵的双腔取卵针,所述双腔取卵针连接负压吸引装置和无菌通道;
[0009]
所述的多功能封闭式恒温培养系统包括识卵及捡卵操作机器人系统、卵子培养箱和受精操作机器人系统;
[0010]
所述的识卵捡卵操作机器人系统包括捡卵机器人、安装在捡卵机器人上的用于捡卵操作的机械臂、为捡卵机器人提供驱动力的动力模块、进行捡卵的捡卵操作区;所述的用于捡卵操作的机械臂配有吸引器与移液器;所述的捡卵机器人在捡卵操作区进行捡卵操作后通过无菌通道将卵子放入卵子培养箱;所述的卵子培养箱与受精操作机器人系统通过无菌传动装置连接;
[0011]
所述的受精操作机器人系统包括受精操作机器人、安装在受精操作机器人上的用于受精操作的机械臂,为受精操作机器人提供驱动力的动力模块、进行受精的受精操作区;所述的用于受精操作的机械臂装配有吸引器、移液器及夹持器。
[0012]
所述的取卵手术机器人系统中,所述超声探头在机械臂的稳定下引导双腔取卵针穿刺;所述负压吸引装置为双腔取卵针吸取卵泡液提供动力;所述无菌通道用于卵泡液在从卵巢中吸取出来后保证卵泡液在无菌的环境下直接输送到恒温培养箱的识卵培养皿;所述试剂储存箱和冲洗装置利用生理盐水冲洗患者外阴与阴道,以及利用pbs冲洗双腔取卵针;所述机械臂上装配有冲洗喷头、夹持臂和注射器。
[0013]
所述的多功能封闭式恒温培养系统还包括配有标签机器人和显微镜摄像系统的胚胎培养储存系统,所述显微镜摄像系统采用time lapse摄影机,用于拍摄识卵培养皿中的卵泡液的影像并将其传送至计算机及操作设备进行分析评估,评估影像从计算机及操作设备传回识卵捡卵操作机器人系统;捡卵机器人及配有吸引器与移液器的机械臂在传回的评估影像的引导下,完成捡卵;所述捡卵操作区由识卵培养皿、洗卵皿、卵母细胞培养皿、耗材试剂更换模块及废物处理、清洁模块组成,捡卵的过程在捡卵操作区进行。
[0014]
所述的卵子培养箱内能够暂时储存捡卵操作中被挑选的卵子,双腔取卵针取卵后,通过无菌通道中的传送装置将卵母细胞培养皿收入卵子培养箱,同时利用标签机器人在识卵培养皿上打上患者信息标签;显微镜摄像系统将箱内影像传输至计算机及操作设
备。
[0015]
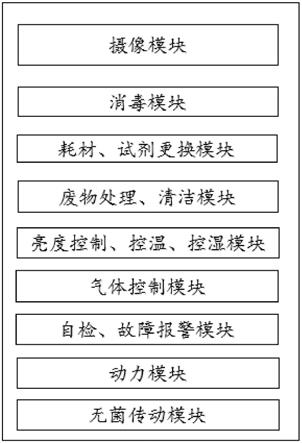
所述的多功能封闭式恒温培养系统还包括培养箱辅助模块及参数模块由集成了各功能模块的处理系统,包括摄像模块、消毒模块、耗材及试剂更换模块、废物处理及清洁模块、亮度控制及控温控湿模块、气体控制模块、自检及故障报警模块、动力模块、无菌传动模块。
[0016]
所述的受精操作区由卵母细胞培养皿、体外受精液培养皿、耗材试剂更换模块及废物处理、清洁模块组成,受精的过程在受精操作区进行。
[0017]
所述的受精操作机器人系统还包括受精操作显微镜摄像系统,所述的用于受精操作的机械臂在受精操作显微镜摄像系统的引导下完成精子滴片观察,之后将卵子加入体外受精液培养皿中。
[0018]
所述的电子计算机及操作设备集成了以下工作界面:取卵超声及机械臂操作界面、人工智能识卵界面、捡卵显微镜影像及机械臂操作界面、受精显微镜影像及机械臂操作界面、卵子培养箱影像及机器人操作界面、胚胎培养箱影像及机械臂操作界面、time lpase摄影界面、故障自检界面、耗材试剂界面、废物处理及清洁界面、参数设置界面、操作设置界面、消毒界面。
[0019]
与现有技术相比,本发明的有益效果是:
[0020]
本发明让手术者可以操作计算机应用程序控制机器人的机械臂的方式实现取卵,减少手术者因自身或外界因素干扰导致手术并发症的增加;患者的卵泡液可直接通过无菌管道注入到恒温培养箱,之后手术者可利用计算机应用程序控制恒温培养箱,通过输入到计算机的显微镜影像完成识卵,再控制操作模块进行捡卵,将卵子和精子放入培养皿中体外受精,最后该培养皿可通过无菌管道直接转送至胚胎培养箱,该系统可由手术者一人完成取卵、转送卵泡液、识卵、捡卵、卵子与精子体外受精等操作,减少多平台合作存在的风险,有效节省了空间与人力,另外减少了卵子及胚胎在运送过程中暴露于体外环境的风险;在time lapse的帮助下避免了每天将培养皿拿出培养箱外观察胚胎发育所带来的风险。此外该系统可以长时间运作,保持稳定效应。
附图说明
[0021]
图1是本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统的基本结构、基本工作原理图。
[0022]
图2是本发明所述是本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统取卵操作的工作原理图。
[0023]
图3是本发明所述的是一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统识卵、捡卵操作的工作原理图。
[0024]
图4是本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统受精操作的工作原理图。
[0025]
图5是本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统胚胎培养操作的工作原理图。
[0026]
图6是本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统计算机应用程序界面示意图。
[0027]
图7是本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统培养箱辅助模块及参数模块的结构示意图。
具体实施方式
[0028]
下面结合具体实施例对本发明作进一步说明。
[0029]
一种基于手术机器人的取卵及胚胎培养一体化的装置,包括取卵手术机器人系统、多功能封闭式恒温培养箱和用于显示影像、进行设置与操作的计算机及操作设备;所述的取卵手术机器人系统、多功能封闭式恒温培养系统均与所述的电子计算机及操作设备相连,操作者通过电子计算机及操作设备控制各系统的操作过程;
[0030]
所述的取卵手术机器人系统包括取卵手术机器人、安装在取卵手术机器人上用于取卵操作的取卵机械臂、为取卵手术机器人提供驱动力的动力模块、试剂储存箱及配套冲洗装置;所述的用于取卵操作的机械臂上装配有超声探头和用于取卵的双腔取卵针,所述双腔取卵针连接负压吸引装置和无菌通道;
[0031]
所述的多功能封闭式恒温培养系统包括识卵及捡卵操作机器人系统、卵子培养箱和受精操作机器人系统;
[0032]
所述的识卵捡卵操作机器人系统包括捡卵机器人、安装在捡卵机器人上的用于捡卵操作的机械臂、为捡卵机器人提供驱动力的动力模块、进行捡卵的捡卵操作区;所述的用于捡卵操作的机械臂配有吸引器与移液器;所述的捡卵机器人在捡卵操作区进行捡卵操作后通过无菌通道将卵子放入卵子培养箱;所述的卵子培养箱与受精操作机器人系统通过无菌传动装置连接;
[0033]
所述的受精操作机器人系统包括受精操作机器人、安装在受精操作机器人上的用于受精操作的机械臂,为受精操作机器人提供驱动力的动力模块、进行受精的受精操作区;所述的用于受精操作的机械臂装配有吸引器、移液器及夹持器。
[0034]
所述的取卵手术机器人系统中,所述超声探头在机械臂的稳定下引导双腔取卵针穿刺;所述负压吸引装置为双腔取卵针吸取卵泡液提供动力;所述无菌通道用于卵泡液在从卵巢中吸取出来后保证卵泡液在无菌的环境下直接输送到恒温培养箱的识卵培养皿;所述试剂储存箱和冲洗装置利用生理盐水冲洗患者外阴与阴道,以及利用pbs冲洗双腔取卵针;所述机械臂上装配有冲洗喷头、夹持臂和注射器。
[0035]
所述的多功能封闭式恒温培养系统还包括配有标签机器人和显微镜摄像系统的胚胎培养储存系统,所述显微镜摄像系统采用time lapse摄影机,用于拍摄识卵培养皿中的卵泡液的影像并将其传送至计算机及操作设备进行分析评估,评估影像从计算机及操作设备传回识卵捡卵操作机器人系统;捡卵机器人及配有吸引器与移液器的机械臂在传回的评估影像的引导下,完成捡卵;所述捡卵操作区由识卵培养皿、洗卵皿、卵母细胞培养皿、耗材试剂更换模块及废物处理、清洁模块组成,捡卵的过程在捡卵操作区进行。
[0036]
所述的卵子培养箱内能够暂时储存捡卵操作中被挑选的卵子,双腔取卵针取卵后,通过无菌通道中的传送装置将卵母细胞培养皿收入卵子培养箱,同时利用标签机器人在识卵培养皿上打上患者信息标签;显微镜摄像系统将箱内影像传输至计算机及操作设备。
[0037]
所述的多功能封闭式恒温培养系统还包括培养箱辅助模块及参数模块由集成了
各功能模块的处理系统,包括摄像模块、消毒模块、耗材及试剂更换模块、废物处理及清洁模块、亮度控制及控温控湿模块、气体控制模块、自检及故障报警模块、动力模块、无菌传动模块。
[0038]
所述的受精操作区由卵母细胞培养皿、体外受精液培养皿、耗材试剂更换模块及废物处理、清洁模块组成,受精的过程在受精操作区进行。
[0039]
所述的受精操作机器人系统还包括受精操作显微镜摄像系统,所述的用于受精操作的机械臂在受精操作显微镜摄像系统的引导下完成精子滴片观察,之后将卵子加入体外受精液培养皿中。
[0040]
所述的电子计算机及操作设备集成了以下工作界面:取卵超声及机械臂操作界面、人工智能识卵界面、捡卵显微镜影像及机械臂操作界面、受精显微镜影像及机械臂操作界面、卵子培养箱影像及机器人操作界面、胚胎培养箱影像及机械臂操作界面、time lpase摄影界面、故障自检界面、耗材试剂界面、废物处理及清洁界面、参数设置界面、操作设置界面、消毒界面。
[0041]
超声、显微镜影像及机械臂操作界面可清晰显示机械臂及足够操作视野;人工智能识卵界面可根据识卵机器人传回的影像进行分析,将图中可能是卵子的结构标识出来,供手术者参考,并包含人工修改界面,记录时间;无菌传动界面可手动控制培养皿在各个部分的移动;卵子培养箱、胚胎培养箱界面可记录目前在培养箱内的所有卵子、胚胎的患者信息、取卵手术时间、受精时间、培养时间;time lpase摄影界面应包括相关设置、每日time lpase摄影机传回的胚胎培养高清图片,并记录时间;故障自检界面包括每次自检的间隔时间、每次自检的记录时间、温度、湿度、气体成分异常时报警,故障的发生部位,自我排查修复选项;耗材、试剂界面可让系统为各个操作部分提前检查、更换和摆放耗材试剂,可记录系统各部分耗材试剂使用量、剩余量,并可以在短缺时自动启动补充请求,待相关人员补充耗材与试剂;废物处理及清洁界面对应培养箱各个部分,在手术者完成该部分操作后,可自启或手动启动废物处理和清洁;参数设置界面,包括摄像的清晰度调节、开关与保存,培养箱亮度、温度、湿度的控制,气体成分的控制;操作设置界面包括对控制设备、机械臂、各类影像的各项调节,如机械臂的灵敏度、视频fov、视频分辨率等(不限于此);消毒界面包括消毒的时间、强度;负压吸引、冲洗装置界面包括负压吸引、冲洗开关、负压的大小、冲洗液的选择、冲洗压力的大小、冲洗部位的选择(冲洗喷头、双腔取卵针)。病例系统、操作记录系统界面可直接与医院系统连接,可帮助手术者调取患者信息,记录操作信息。
[0042]
本实施例中,操作设备是为手术者控制此系统的机器人完成取卵手术及胚胎培养过程的各类人体工程学设备,可能是手柄与摇杆、操控板、踏板、按钮控制器、鼠标、键盘等,本发明所述操作设备不局限于以上所述设备,任何为手术者设计方便其控制该系统的操作设备均包含在内。
[0043]
本实施例中,培养箱辅助模块及参数模块主要由图7的各项模块构成。培养箱各部分均由以上模块控制和调节,模块的目的均已体现在计算机应用程序界面的描述中。
[0044]
本实施例中,本系统可以通过5g技术开展远程的取卵及胚胎培养一体化的操作。
[0045]
本实施例中,本系统的机器人识卵人工智能可以通过大量的取卵进行大数据存储与计算,同时还可以通过学习人工识卵来提高机器人智能取卵的准确率。
[0046]
本实施例中,本系统的卵子、受精、胚胎情况的评估也可引入人工智能及大数据存
储、计算,可为手术者在难以评估以上情形时提供有力的参考数据,并可用于临床科研。
[0047]
本实施例中,本系统可与医院的其他联网系统(如病例系统)连接。
[0048]
本实施例中,本系统的取卵穿刺超声影像可存储,并在播放录像时可显示穿刺轨迹,有利于教学、手术记录和工作总结。
[0049]
本实施例中,本系统的操作设备可根据不同手术者的需要将不同的操作设置、参数设置保存在计算机应用程序中。
[0050]
如图1所示,本发明所述的一种基于手术机器人的取卵及胚胎培养一体化的控制装置及系统,包括取卵手术机器人系统(可配有阴道超声探头,并可自由装配术中所需器械),负压吸引装置及冲洗装置,无菌管道系统,用于识卵、捡卵、受精及胚胎培养的多功能封闭式恒温培养箱,用于显示影像、用于进行设置与操作(包含相关配套的应用程序)的电子计算机,以及方便手术者用于操作机器人的操作设备。本发明所述的取识捡一体化的体外取卵系统的在实施例中的工作过程如下:
[0051]
如图2所示,在取卵手术前,开启电子计算机,打开应用程序进行系统自检,自检无误后,切换到应用程序操作设置界面,可对操作设备、机械臂、各项影像的相关参数等做出相应的设置。在取卵前,患者取膀胱截石位固定于手术床上,通过应用程序界面选择生理盐水冲洗,调整合适的冲洗压力后,手术者操作应用程序开启冲洗。同时手术者者控制与计算机相连的操作设备,通过相关应用程序发出指令,经输出信号处理模块处理后,控制取卵手术机器人的机械臂,对患者的外阴和阴道进行冲洗。之后,手术者通过应用程序界面调整冲洗液和冲洗部位,改为pbs冲洗双腔取卵针,开始冲洗。冲洗完毕,开始取卵。机械臂上的超声探头将数据发送至计算机上的超声影像采集卡进行影像捕捉,处理后的实时超声影像画面展示在应用程序中,并显示穿刺引导线。手术者在超声引导下通过操作设备控制机械臂上的双腔取卵针经阴道后穹窿刺入卵巢。当手术者决定吸取卵泡液时,在应用程序中设定负压吸引的压力大小,便可控制操作设备操作装配在机械臂上的双腔取卵针对卵泡液进行吸取。卵泡液直接经无菌通道被吸入至恒温培养箱的捡卵操作区的识卵培养皿中。取卵结束后,开启冲洗界面冲洗双腔取卵针。患者在核对人员的帮助下,离开手术室。手术者准备进行下一步的操作。在取卵手术前,可预先通过应用程序界面向培养箱的各项模块发送信号,以调节培养箱各个部分内的参数。术者可通过应用程序设置培养箱的亮度、温度、湿度、气体组分、消毒灭菌的强度和时间,之后通过耗材、试剂界面对培养箱的耗材试剂进行检查、更换与摆放。培养箱的各项参数满足卵母细胞、精子和胚胎的生活条件后,进行取卵。如图3所示,取得的卵泡液输入到培养箱的捡卵操作区后,通过应用程序可将计算机显示画面从超声操作画面切换至识卵、捡卵显微镜影像及机械臂操作界面。影像经过输入信号处理模块处理后,通过计算机的hdmi或dvi接口将高清画面传输至应用程序显示。识卵机器人的显微镜影像可经识卵人工智能的分析评估,在人工智能识卵界面形成结果图及报告,对可能是卵子的结构进行高亮显示,手术者经过确认无误后,通过操作设备控制识卵机器人的机械臂,吸取影像中识卵培养皿被高亮的卵子,加入到洗卵皿中,用机械臂的移液器加入漂洗液,漂洗结束后,卵子被吸至卵母细胞培养皿,并加入卵母细胞培养液。手术者随后启动无菌传动系统、耗材试剂更换模块和废物处理、清洁模块,将卵母细胞培养皿送入卵子培养箱,并完成对捡卵操作区及识卵、捡卵机器人的耗材试剂更换、废物清理和清洁。
[0052]
卵子操作箱中的机器人在培养皿送入箱内时立即对其打上患者信息标签,以备未
来双人核对。培养数小时后,手术者控制卵子培养箱中的机械臂将需要的培养皿取出,经手术者和核对者二人核对患者信息无误后,启动无菌传动装置将卵母细胞培养皿送至受精操作区。
[0053]
如图4所示,手术者将应用程序切换至受精显微镜影像及机械臂操作界面,利用操作设备控制机械臂将预先准备的精子试管取出,与核对者完成双人核对患者配偶信息无误后,进行精子滴片观察,完成精子评估。随后手术者操作机械并将卵子从卵母细胞培养皿中吸出,放入含有体外受精液的培养皿中,并加入精子。启动无菌传动系统、耗材试剂更换模块和废物处理、清洁模块,体外受精液培养皿被送入胚胎培养系统培养,同时完成对捡卵操作区及识卵、捡卵机器人的耗材试剂更换、废物清理和清洁。
[0054]
如图5所示,16-20个小时后,手术者将应用程序切换至胚胎培养箱影像及机械臂操作界面,观察体外受精液培养皿,用机械臂的吸引器对培养皿吹打去除颗粒细胞后,将合子加入至含有胚胎生长液的培养皿中,机器人自动为此培养皿打上合子或胚胎信息标签。之后手术者每日通过time lapse摄影界面对胚胎发育进行评估,利用机械臂对培养皿进行换液,及时清理废物和消毒清洁。当胚胎发育至可以胚胎移植时,手术者与核对者双人核对无误后,可经无菌传动系统将培养皿送出该系统。
[0055]
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,任何熟悉本专业的技术人员,在不脱离本发明技术方案范围内,依据本发明的技术实质,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍属于本发明技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1