一种主被动混合式液压膝关节假肢的制作方法
[0001]
本实用新型涉及康复辅具技术领域,具体涉及一种主被动混合式液压膝关节假肢。
背景技术:
[0002]
下肢假肢作为一种为弥补下肢截肢者而专门设计和制作装配的人工假体,主要作用是代替失去肢体的部分功能,使截肢者恢复一定的生活自理和工作能力。膝关节作为人体行走最重要的关节,膝关节假肢的研发一直是下肢假肢研究的重点和难点。
[0003]
膝关节假肢按驱动模式分为被动型假肢、主动型假肢、主被动混合型假肢。被动型假肢通过固定阻尼或者可调阻尼结构实现截肢者的水平行走,但针对上楼梯等大扭矩运动模式,截肢者能量消耗巨大或者无法实现上楼;主动型假肢通过动力输入控制膝关节屈伸可较好实现上楼梯、上坡等运动,但水平行走运动模式下的持续大量能量消耗导致续航时间较短;主被动混合型假肢作为介于被动型和主动型假肢之间的驱动模式,在水平行走运动模式下采用被动型驱动,在上楼梯、上坡等运动模式下采用主动型驱动,实现了助力效果和续航时间的平衡。
[0004]
现有主被动混合型膝关节假肢通常采用被动阻尼缸与主动驱动部件分开布置,通过离合装置实现主被动混合切换,普遍存在以下不足:
[0005]
增加离合装置,并且只能在特定位置实现主被动切换,结构繁琐,主被动驱动模式衔接不流畅,控制复杂;
[0006]
被动阻尼缸与主动驱动部件分开布置导致假肢整体尺寸偏大,重量增加,使用不便;
[0007]
无法实现膝关节屈曲位置时的能量储存与利用,续航时间仍有待提高。
技术实现要素:
[0008]
为了解决现有技术中存在的问题,本实用新型提供了一种主被动混合式液压膝关节假肢,假肢将驱动组件、阻尼调节组件与液压缸组件一体化,体积小、重量轻,主被动驱动模式切换流畅、易于控制。
[0009]
本实用新型解决技术问题所采用的技术方案如下:
[0010]
本实用新型首先提供了一种主被动混合式液压膝关节假肢,包括:
[0011]
支撑组件,其上端转动连接有膝上接受腔固定件,其下端固定连接有小腿连接架,其内部用于安装驱动组件、阻尼调节组件、液压缸组件、蓄能组件和液压集成块;
[0012]
驱动组件,用于主动驱动模式下,通过第一伺服电机带动液压泵对液压缸组件进行驱动,实现膝关节主动伸展;
[0013]
阻尼调节组件,用于被动驱动模式下,通过第二伺服电机带动阻尼阀阀芯调节阀开口大小对液压缸组件进而调节阻尼,实现膝关节的被动伸展和被动屈曲;
[0014]
液压缸组件,包括活塞杆和活塞,活塞杆的上端铰接在膝上接受腔固定件上,液压
缸组件的下端铰接在小腿连接架的上方,液压缸组件通过驱动组件驱动实现膝关节假肢运动,通过阻尼调节组件实现被动伸展和被动屈曲运动;
[0015]
蓄能组件,安装于液压缸组件内,用于膝关节假肢运动过程中的能量储存与释放;
[0016]
以及液压集成块,用来放置驱动组件、阻尼调节组件、液压缸组件和蓄能组件,液压集成块内部有相互连通的油路。
[0017]
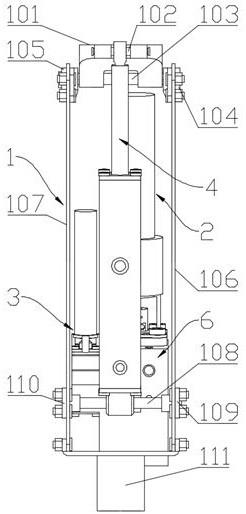
进一步地,所述的支撑组件包括位于上端的膝上接受腔固定件、第一连接轴和第二连接轴,以及位于两侧的第一支撑板和第二支撑板,以及位于下端的第三连接轴和小腿连接架;所述的膝上接受腔固定件的后端通过第一连接轴与液压缸组件的上端相连,其两侧通过第二连接轴分别与第一支撑座和第二支撑座铰接,第一支撑座和第二支撑座分别固定在第一支撑板和第二支撑板的上部;液压缸组件的下端与第三连接轴铰接,第三连接轴的两端分别与第三支撑座、第四支撑座固定相连,第三支撑座、第四支撑座分别固定在第一支撑板、第二支撑板的下部;小腿连接架的两端分别与第一支撑板、第二支撑板的下端固定。
[0018]
进一步地,所述的驱动组件包括第一伺服电机、联轴器、第一电机支架和液压泵;第一伺服电机固定在第一电机支架上,并通过联轴器与液压泵连接,液压泵与第一电机支架固定在液压集成块上,液压泵放置在液压集成块对应孔内。
[0019]
进一步地,所述的阻尼调节组件包括第二伺服电机、第二电机支架、阻尼阀前端盖、阻尼阀阀芯和阻尼阀后端盖,第二伺服电机固定在第二电机支架上,并且第二伺服电机的输出端连接阻尼阀阀芯,第二电机支架和阻尼阀前端盖、阻尼阀后端盖固定在液压集成块上,阻尼阀前端盖、阻尼阀阀芯和阻尼阀后端盖放置在液压集成块对应孔内。
[0020]
进一步地,所述的液压缸组件包括活塞杆、活塞、液压缸前端盖和液压缸后端盖;活塞杆的上端通过第一连接轴与膝上接受腔固定件连接,活塞杆的下端与活塞固定,液压缸后端盖转动连接在第三连接轴上,液压缸组件放置在液压集成块对应孔内。
[0021]
进一步地,所述的蓄能组件包括蓄能弹簧和蓄能活塞,蓄能弹簧、蓄能活塞穿过活塞杆并与之同轴,蓄能弹簧的两端分别与蓄能活塞和液压缸前端盖相连,放置在液压集成块对应孔内,蓄能活塞位于液压缸前端盖和活塞之间。
[0022]
进一步地,所述的液压集成块内部有相互连通的油路以及用来放置驱动组件、阻尼调节组件、液压缸组件和蓄能组件的对应孔。
[0023]
本实用新型还提供了上述的主被动混合式液压膝关节假肢的控制方法,包括被动驱动模式和主动驱动模式,其中:
[0024]
被动驱动模式下第一伺服电机制动锁止,第二伺服电机带动阻尼阀阀芯调节阀开口大小,阻尼阀阀芯两个油口直接与活塞上下两腔相连,调节阻尼;
[0025]
主动驱动模式下第二伺服电机带动阻尼阀阀芯将阀开口关闭,第一伺服电机带动液压泵,液压泵进出油口直接与活塞上下两腔相连,主动驱动;
[0026]
被动驱动模式与主动驱动模式可在膝关节任意位置进行切换。
[0027]
本实用新型还提供了上述的主被动混合式液压膝关节假肢在大扭矩运动模式中的应用以及在水平行走运动模式中的应用。
[0028]
本实用新型的有益效果是:
[0029]
1、本实用新型的主被动混合式液压膝关节假肢,驱动组件、阻尼调节组件与液压
109、第四支撑座110固定相连,第三支撑座109、第四支撑座110分别固定在第一支撑板106、第二支撑板107的下部;小腿连接架111的两端分别与第一支撑板106、第二支撑板107的下端固定。
[0047]
所述的驱动组件2包括第一伺服电机201、联轴器202、第一电机支架203 和液压泵204;第一伺服电机201固定在第一电机支架203上,并通过联轴器 202与液压泵204连接,液压泵204与第一电机支架203固定在液压集成块6上,液压泵204放置在液压集成块6对应孔内。
[0048]
所述的阻尼调节组件3包括第二伺服电机301、第二电机支架302、阻尼阀前端盖303、阻尼阀阀芯304和阻尼阀后端盖305,第二伺服电机301固定在第二电机支架302上,并且第二伺服电机301的输出端连接阻尼阀阀芯,第二电机支架302和阻尼阀前端盖303、阻尼阀后端盖305固定在液压集成块6上,阻尼阀前端盖303、阻尼阀阀芯304和阻尼阀后端盖305放置在液压集成块6对应孔内。
[0049]
所述的液压缸组件4包括活塞杆401、活塞402、液压缸前端盖403和液压缸后端盖404;活塞杆401的上端通过第一连接轴102与膝上接受腔固定件101 连接,活塞杆401的下端与活塞402固定,液压缸后端盖404转动连接在第三连接轴108上,液压缸组件放置在液压集成块6对应孔内。
[0050]
所述的蓄能组件5包括蓄能弹簧501和蓄能活塞502,蓄能弹簧501、蓄能活塞502穿过活塞杆401并与之同轴,蓄能弹簧501的两端分别与蓄能活塞502 和液压缸前端盖403相连,放置在液压集成块6对应孔内,蓄能活塞502位于液压缸前端盖403和活塞402之间。所述的蓄能弹簧501在膝关节屈曲时受压,蓄能活塞沿活塞杆向上移动;所述蓄能弹簧501在膝关节伸展时释放,蓄能活塞502沿活塞杆401向下移动。
[0051]
所述的液压集成块6内部有相互连通的油路以及用来放置驱动组件2、阻尼调节组件3、液压缸组件4和蓄能组件5的对应孔。
[0052]
本实用新型的主被动混合式液压膝关节假肢的工作原理如下:
[0053]
请参阅图1至图6所示,活塞402上腔面积小于下腔作用面积,当膝关节屈曲时,活塞杆401及活塞402向下移动,膝上接受腔固定件101向下翻转,活塞402流出下腔液压油的体积等于流入上腔液压油的体积,但由于上下腔面积不等,蓄能活塞502沿活塞杆401向上移动,蓄能活塞502和蓄能弹簧501 受压,储存能量。
[0054]
反之,当膝关节伸展时,活塞杆401及活塞402向上移动,膝上接受腔固定件101向上翻转,活塞402流出上腔液压油的体积等于流入下腔液压油的体积,但由于上下腔面积不等,蓄能活塞502沿活塞杆401向下移动,蓄能弹簧 501释放能量。
[0055]
活塞402位移与蓄能活塞502位移数学关系如下所示:
[0056]
活塞402位移
×
(活塞402下腔面积-活塞402上腔面积)=蓄能活塞502 位移
×
活塞402上腔面积
[0057]
本实用新型还提供了上述的主被动混合式液压膝关节假肢的控制方法,包括被动驱动模式和主动驱动模式,如图6所示,其中:
[0058]
被动驱动模式下第一伺服电机201制动锁止,第二伺服电机301带动阻尼阀阀芯304调节阀开口大小,阻尼阀阀芯304两个油口直接与活塞402上下两腔相连,调节阻尼;
[0059]
主动驱动模式下第二伺服电机301带动阻尼阀阀芯304将阀开口关闭,第一伺服电
机201带动液压泵204,液压泵204进出油口直接与活塞402上下两腔相连,主动驱动;
[0060]
被动驱动模式与主动驱动模式可在膝关节任意位置进行切换。
[0061]
本实用新型的主被动混合式液压膝关节假肢可应用在大扭矩运动模式中,具体的,本实用新型提供两种控制方案。所述方案一为主被动混合驱动模式,在上楼梯、上坡等大扭矩运动模式中的膝关节主动伸展阶段采用主动驱动模式,在上楼梯、上坡等大扭矩运动模式中的被动屈曲、被动伸展阶段采用被动驱动模式;所述方案二为完全主动驱动模式,在上楼梯、上坡等大扭矩运动模式中的膝关节各个步态阶段均采用主动驱动模式,获得更好的助力效果,但能耗增加。
[0062]
本实用新型的主被动混合式液压膝关节假肢可应用在水平行走运动模式中,具体的,本实用新型提供两种控制方案。所述方案一为完全被动驱动模式控制方案,在水平行走运动模式中的各个步态阶段均采用被动模式,调节阻尼;所述方案二为主被动混合驱动模式控制方案,在水平行走运动模式中的摆动期 (膝关节假肢离地摆动阶段)步态采用主动驱动模式和被动驱动模式联合驱动方案,具体的,阻尼阀调节阀口大小,同时液压泵工作,主动调节膝关节假肢离地姿态,增强运动稳定性;在水平行走运动模式中的其他步态阶段采用被动驱动模式。
[0063]
在本实用新型的描述中,需要理解的是,术语“中心”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0064]
尽管本实用新型的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用。它完全可以被适用于各种适合本实用新型的领域。对于熟悉本领域的人员而言,可容易地实现另外的修改。因此在不背离权利要求及等同范围所限定的一般概念下,本实用新型并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1