一种骨折用固定矫正装置的制作方法
1.本实用新型涉及骨折康复技术领域,特别是涉及一种骨折用固定矫正装置。
背景技术:
2.骨折是指骨结构的连续性完全或部分断裂,对于一些经常使用手臂从事重量较大工作中的工作人员来说,手臂骨折具有较高的发生性,对于骨折复位后的固定,通常是使用形状的固定板进行固定,病人会有很强的束缚感,在手掌与手臂处不能进行小范围的活动,不利与之后的肌肉恢复。
技术实现要素:
3.本实用新型的目的是提供一种骨折用固定矫正装置,能够在固定骨折时能够在前端进行转动更加贴合骨折端,方便使用。
4.本实用新型的目的通过以下技术方案来实现:
5.一种骨折用固定矫正装置包括滑动固定板、骨折固定端和辅助固定机构,滑动固定板的左端滑动连接在骨折固定端的右端,辅助固定机构固定连接在骨折固定端的左端;
6.所述的滑动固定板包括前固定板、固定用弯折板、纱线固定柱、收紧螺栓、上弯折板、旋转接头、固定板连接头和滑动调整柱,两个旋转接头分别固定连接在前固定板的两端,两个固定板连接头分别转动连接在两个旋转接头上,两个固定板连接头分别固定连接在两个固定用弯折板上,上弯折板固定连接在位于前端的固定用弯折板上,收紧螺栓固定连接在上弯折板上,纱线固定柱固定连接在位于后端的固定用弯折板上,滑动调整柱固定连接在前固定板的左端,纱线固定柱通过纱线与收紧螺栓连接;
7.所述的骨折固定端包括骨折固定板、锁定固定板、转动接头、螺栓固定板、布条固定螺栓、上旋转接头、连接柱、转轴连接板和纱布转轴,滑动调整柱滑动连接在骨折固定板的右端的滑槽中,六个转动接头均固定连接在骨折固定板上,六个上旋转接头别与六个转动接头转动连接,六个转动接头分别固定连接在六个锁定固定板的下端,三个螺栓固定板分别固定连接在位于前端的三个锁定固定板的上端,三个布条固定螺栓分别固定连接在三个螺栓固定板上,连接柱设有六个,六个连接柱分别固定连接在位与后端的三个锁定固定板上,三个转轴连接板的两端分别固定连接在两个连接柱的上端,三个纱布转轴分别转动连接在三个转轴连接板内;
8.所述的辅助固定机构包括辅助夹持板、支撑杆、固定轴、转动轴、电机、连接轴、收线轮和自由转动连接转杆,辅助夹持板的下端固定连接在五个自由转动连接转杆,五个自由转动连接转杆均固定连接在骨折固定板的左端,辅助夹持板的两端分别固定连接有两个支撑杆,位于后端的两个支撑杆之间固定连接有固定轴,转动轴转动连接在固定轴上,电机固定连接在位于前端下部的支撑杆上,连接轴固定连接在电机的输出轴上,收线轮固定连接在连接轴上,连接轴转动连接在位于前端上部的支撑杆上;
9.所述的自由转动连接转杆采用高韧性材料。
10.本实用新型的有益效果为:
11.本实用新型提供了一种骨折用固定矫正装置,在使用时,将纱布缠绕在三个纱布转轴上,将纱线穿过纱线固定柱上,将顾客手臂放在骨折固定板和前固定板上,转动连杆固定用弯折板和多个锁定固定板并将纱线和纱布分别缠绕在对应的收紧螺栓和布条固定螺栓上并进行旋转收紧完成对骨折端的固定,将辅助夹持板贴合在大臂上,将纱布固定在转动轴上,纱布一端固定连接在收线轮,启动电机,将纱布收紧完成固定,在需要放松时,再次启动电机就可以完成放松纱布。
附图说明
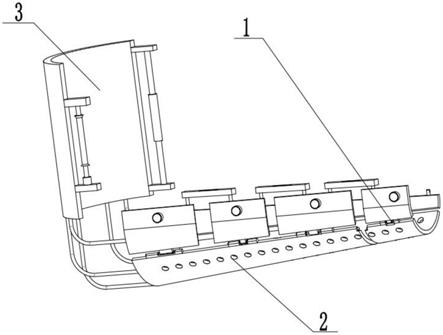
12.图1是本实用新型的整体结构示意图;
13.图2是本实用新型的滑动固定板结构示意图;
14.图3是本实用新型的骨折固定端结构示意图;
15.图4是本实用新型的辅助固定机构结构示意图。
16.图中:滑动固定板1;前固定板1
‑
1;固定用弯折板1
‑
2;纱线固定柱1
‑
3;收紧螺栓1
‑
4;上弯折板1
‑
5;旋转接头1
‑
6;固定板连接头1
‑
7;滑动调整柱 1
‑
8;骨折固定端2;骨折固定板2
‑
1;锁定固定板2
‑
2;转动接头2
‑
3;螺栓固定板2
‑
4;布条固定螺栓2
‑
5;上旋转接头2
‑
6;连接柱2
‑
7;转轴连接板2
‑
8;纱布转轴2
‑
9;辅助固定机构3;辅助夹持板3
‑
1;支撑杆3
‑
2;固定轴3
‑
3;转动轴3
‑
4;电机3
‑
5;连接轴3
‑
6;收线轮3
‑
7;自由转动连接转杆3
‑
8。
具体实施方式
17.下面结合附图1
‑
4对本实用新型做进一步详细说明。
18.具体实施方式一:
19.如图1
‑
4所示,一种骨折用固定矫正装置包括滑动固定板1、骨折固定端2 和辅助固定机构3,滑动固定板1的左端滑动连接在骨折固定端2的右端,辅助固定机构3固定连接在骨折固定端2的左端;
20.在使用时,将纱布缠绕在三个纱布转轴2
‑
9上,将纱线穿过纱线固定柱1
‑
3 上,将顾客手臂放在骨折固定板2
‑
1和前固定板1
‑
1上,转动连杆固定用弯折板1
‑
2和多个锁定固定板2
‑
2并将纱线和纱布分别缠绕在对应的收紧螺栓1
‑
4 和布条固定螺栓2
‑
5上并进行旋转收紧完成对骨折端的固定,将辅助夹持板3
‑
1 贴合在大臂上,将纱布固定在转动轴3
‑
4上,纱布一端固定连接在收线轮3
‑
7,启动电机3
‑
5,将纱布收紧完成固定,在需要放松时,再次启动电机3
‑
5就可以完成放松纱布。
21.具体实施方式二:
22.如图1
‑
4所示,所述的滑动固定板1包括前固定板1
‑
1、固定用弯折板1
‑
2、纱线固定柱1
‑
3、收紧螺栓1
‑
4、上弯折板1
‑
5、旋转接头1
‑
6、固定板连接头 1
‑
7和滑动调整柱1
‑
8,两个旋转接头1
‑
6分别固定连接在前固定板1
‑
1的两端,两个固定板连接头1
‑
7分别转动连接在两个旋转接头1
‑
6上,两个固定板连接头1
‑
7分别固定连接在两个固定用弯折板1
‑
2上,上弯折板1
‑
5固定连接在位于前端的固定用弯折板1
‑
2上,收紧螺栓1
‑
4固定连接在上弯折板1
‑
5上,纱线固定柱1
‑
3固定连接在位于后端的固定用弯折板1
‑
2上,滑动调整柱1
‑
8固定连接在前固定板1
‑
1的左端,纱线固定柱1
‑
3通过纱线与收紧螺栓1
‑
4连接;
23.将手臂前端放置在前固定板1
‑
1上,转动两个固定用弯折板1
‑
2,将纱线穿过纱线固定柱1
‑
3之后在缠绕在收紧螺栓1
‑
4上,转动收紧螺栓1
‑
4进行收紧完成固定,滑动调整柱1
‑
8滑动在骨折固定板2
‑
1的右端的滑槽中,能够使手掌有一定的活动空间。
24.具体实施方式三:
25.如图1
‑
4所示,所述的骨折固定端2包括骨折固定板2
‑
1、锁定固定板2
‑
2、转动接头2
‑
3、螺栓固定板2
‑
4、布条固定螺栓2
‑
5、上旋转接头2
‑
6、连接柱 2
‑
7、转轴连接板2
‑
8和纱布转轴2
‑
9,滑动调整柱1
‑
8滑动连接在骨折固定板2
‑
1的右端的滑槽中,六个转动接头2
‑
3均固定连接在骨折固定板2
‑
1上,六个上旋转接头2
‑
6别与六个转动接头2
‑
3转动连接,六个转动接头2
‑
3分别固定连接在六个锁定固定板2
‑
2的下端,三个螺栓固定板2
‑
4分别固定连接在位于前端的三个锁定固定板2
‑
2的上端,三个布条固定螺栓2
‑
5分别固定连接在三个螺栓固定板2
‑
4上,连接柱2
‑
7设有六个,六个连接柱2
‑
7分别固定连接在位与后端的三个锁定固定板2
‑
2上,三个转轴连接板2
‑
8的两端分别固定连接在两个连接柱2
‑
7的上端,三个纱布转轴2
‑
9分别转动连接在三个转轴连接板 2
‑
8内;
26.将前臂放置在骨折固定板2
‑
1上,转动多个锁定固定板2
‑
2,将纱布缠绕在纱布转轴2
‑
9上,将纱布缠绕在三个布条固定螺栓2
‑
5上,旋转三个布条固定螺栓2
‑
5进行收紧,由于是分体设置,能够他对不同位置进行收紧程度不同的调整。
27.具体实施方式四:
28.如图1
‑
4所示,所述的辅助固定机构3包括辅助夹持板3
‑
1、支撑杆3
‑
2、固定轴3
‑
3、转动轴3
‑
4、电机3
‑
5、连接轴3
‑
6、收线轮3
‑
7和自由转动连接转杆3
‑
8,辅助夹持板3
‑
1的下端固定连接在五个自由转动连接转杆3
‑
8,五个自由转动连接转杆3
‑
8均固定连接在骨折固定板2
‑
1的左端,辅助夹持板3
‑
1 的两端分别固定连接有两个支撑杆3
‑
2,位于后端的两个支撑杆3
‑
2之间固定连接有固定轴3
‑
3,转动轴3
‑
4转动连接在固定轴3
‑
3上,电机3
‑
5固定连接在位于前端下部的支撑杆3
‑
2上,连接轴3
‑
6固定连接在电机3
‑
5的输出轴上,收线轮3
‑
7固定连接在连接轴3
‑
6上,连接轴3
‑
6转动连接在位于前端上部的支撑杆3
‑
2上;
29.将大臂放置在辅助夹持板3
‑
1上,纱布缠绕在转动轴3
‑
4上,一端固定在收线轮3
‑
7上,启动电机3
‑
5,连接轴3
‑
6带动收线轮3
‑
7转动,对纱布进行收紧,再次启动电机3
‑
5,连接轴3
‑
6反转使纱布放松,辅助固定机构3的设置能够稳定大臂肌肉不进行大范围的收缩释放,摆正骨折端的肌肉对骨头的压迫程度变化不大。
30.具体实施方式五:
31.如图1
‑
4所示,所述的自由转动连接转杆3
‑
8采用高韧性材料,能瓯在固定后能够在保证能够患者在自用互动的同时下增加使用寿命。
32.本实用新型一种骨折用固定矫正装置,其使用原理为:在使用时,将纱布缠绕在三个纱布转轴2
‑
9上,将纱线穿过纱线固定柱1
‑
3上,将顾客手臂放在骨折固定板2
‑
1和前固定板1
‑
1上,转动连杆固定用弯折板1
‑
2和多个锁定固定板2
‑
2并将纱线和纱布分别缠绕在对应的收紧螺栓1
‑
4和布条固定螺栓2
‑
5 上并进行旋转收紧完成对骨折端的固定,将辅助夹持板3
‑
1贴合在大臂上,将纱布固定在转动轴3
‑
4上,纱布一端固定连接在收线轮3
‑
7,启动电机3
‑
5,将纱布收紧完成固定,在需要放松时,再次启动电机3
‑
5就可以完成放松纱布,将手臂前端放置在前固定板1
‑
1上,转动两个固定用弯折板1
‑
2,将纱线穿过纱线固定柱1
‑
3之后在缠绕在收紧螺栓1
‑
4上,转动收紧螺栓1
‑
4进行收紧完成固定,滑动调整柱1
‑
8滑动在骨
折固定板2
‑
1的右端的滑槽中,能够使手掌有一定的活动空间,将前臂放置在骨折固定板2
‑
1上,转动多个锁定固定板2
‑
2,将纱布缠绕在纱布转轴2
‑
9上,将纱布缠绕在三个布条固定螺栓2
‑
5上,旋转三个布条固定螺栓2
‑
5进行收紧,由于是分体设置,能够他对不同位置进行收紧程度不同的调整,将大臂放置在辅助夹持板3
‑
1上,纱布缠绕在转动轴3
‑
4 上,一端固定在收线轮3
‑
7上,启动电机3
‑
5,连接轴3
‑
6带动收线轮3
‑
7转动,对纱布进行收紧,再次启动电机3
‑
5,连接轴3
‑
6反转使纱布放松,辅助固定机构3的设置能够稳定大臂肌肉不进行大范围的收缩释放,摆正骨折端的肌肉对骨头的压迫程度变化不大。
33.当然,上述说明并非对本实用新型的限制,本实用新型也不仅限于上述举例,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换,也属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1