腕舟骨骨折手术辅助装置的制作方法
1.本实用新型涉及一种医疗装置,具体涉及腕舟骨骨折手术辅助装置。
背景技术:
2.腕舟骨骨折在临床较常见,腕舟骨骨折患者治疗方式包括闭合复位石膏外固定、闭合复位经皮穿针内固定、切开复位穿针内固定、闭合复位经皮空心钉内固定,以及切开复位空心钉内固定。对于新鲜无移位的腕舟骨骨折首选闭合复位石膏外固定及闭合复位经皮空心钉或钢针内固定。
3.目前,腕舟骨骨折手术采用闭合复位经皮空心钉或钢针内固定的治疗方式时,多使用“天玑”骨科机器人进行辅助。“天玑”骨科机器人具有提升手术精度,可将定位、深度、角度等误差控制在0.8mm之内的优势。
4.由于“天玑”骨科机器人的使用需要配合配套设置的示踪器,通过保证患者手腕部与示踪器相对位置的固定,从而使机器人通过追踪确认示踪器位置而对患者手腕部进行治疗。所以现有技术为了固定示踪器,通常是在腕舟骨骨折位置的皮肤进行切口,在切口内安装示踪器。但该方式不仅增加了手术创伤,延长了手术时间;而且由于腕舟骨的解剖及形状不规则,该方式易发生进针点和进针角度出现偏移的情况,无法一次穿针到位,进一步延长了手术时间;再者,往往需要借助x射线辅助手术操作,也给患者和医务人员身体造成了伤害。
技术实现要素:
5.本实用新型所要解决的技术问题是,提供腕舟骨骨折手术辅助装置,通过该装置配合“天玑”骨科机器人在腕舟骨骨折手术采用闭合复位经皮空心钉或钢针内固定的治疗方式时,实现示踪器的无创固定,减少手术创伤,防止x射线给患者和医务人员的身体带来伤害,缩短手术时间,增加机器人手术的精准度,提高手术质量和手术效率。
6.为了解决这一技术问题,本实用新型采用了以下技术方案:
7.腕舟骨骨折手术辅助装置,其特征在于,
8.它包括腕部固定器,所述的腕部固定器包括固定板、第一平板和第二平板,第一平板上端和第二平板上端垂直相接,第一平板内侧和第二平板内侧分别与固定板的两端固定连接,第二平板的外侧安装有用于固定示踪器的固定杆;
9.该装置还包括与手术床固定连接的肢体延长板,腕部固定器放置在肢体延长板上。
10.优选地,该装置还包括固定装置和支撑杆,所述的肢体延长板一端通过固定装置与手术床相连接,肢体延长板的另一端底部与支撑杆的上端相连接,支撑杆的下端支撑在地面上。
11.优选地,所述的固定装置包括夹持件、螺杆和压块;所述夹持件上设有水平的顶板和位于顶板下方的导向槽,所述压块与所述导向槽相配合;所述螺杆穿过夹持件底部的螺
纹孔后与压块转动连接,以驱动压块沿导向槽上下移动。
12.优选地,所述的固定装置还包括方管和套管,方管的上端与肢体延长板一端的底部相垂直且固定连接,套管固定在夹持件上,套管与方管滑动配合,套管侧壁上开设有螺纹孔,该螺纹孔中安装有第一紧定螺钉。
13.优选地,所述的螺杆下端还连接有调节手柄。
14.优选地,所述的支撑杆包括套筒,套筒的下端固定在底座上,套筒内套接有伸出杆,伸出杆的上端与肢体延长板底部相垂直且固定连接,套筒侧壁上开设有螺纹孔,该螺纹孔中安装有第二紧定螺钉。
15.优选地,所述的肢体延长板为碳纤维板。
16.优选地,所述的第一平板和第二平板的两侧设有锯齿状的凹槽。
17.优选地,所述的固定板、第一平板和第二平板为长方形透明板。
18.本实用新型的积极效果在于:
19.第一、本实用新型通过将患者手腕和示踪器一起固定在腕部固定器上,实现了两者相对位置的固定,同时减少了手术创伤,防止了x射线给患者和医务人员的身体带来伤害,缩短了手术时间,提高了手术效率;
20.第二、本实用新型通过设置肢体延长板,增加了患者手腕的稳定性,提高了机器人手术的精准度,保证了手术的顺利进行;
21.第三、本实用新型通过采用透明材质制作腕部固定器,方便在手术中透视观察;
22.第四、本实用新型原理简单,实施方便,能够简化医务人员的手术操作,优化腕舟骨骨折手术的进程。
附图说明
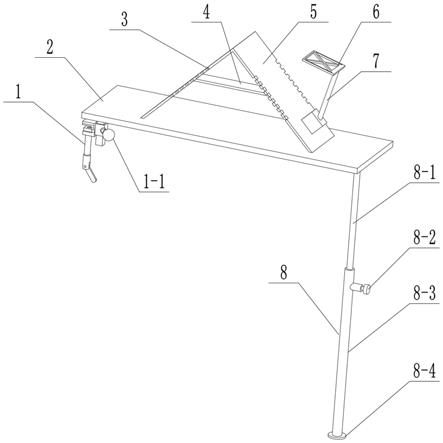
23.图1是本实用新型的整体结构示意图;
24.图2是本实用新型的固定装置剖面图。
具体实施方式
25.下面结合附图和实施例进一步说明本实用新型。
26.如图1所示,本实用新型包括腕部固定器、肢体延长板2、固定装置1和支撑杆8。
27.所述的腕部固定器包括固定板4、第一平板3和第二平板5,第一平板3上端和第二平板5上端垂直相接,第一平板3和第二平板5均为300mm*150mm的长方形透明板, 固定板4为280mm*80mm的长方形透明板。通过采用透明材质制作腕部固定器,方便在手术中透视观察。
28.第一平板3内侧和第二平板5内侧分别与固定板4的两端通过螺纹方式固定连接,固定板4平行于第一平板3和第二平板5所构成的直角三角形中的斜边。所述的第一平板3和第二平板5的两侧设有锯齿状的凹槽,以便增加绷带的摩擦力,增加手腕固定的稳定性。
29.所述第二平板5的外侧安装有5mm *150mm的固定杆7,固定杆7上端与示踪器6下侧螺纹连接,示踪器6在固定杆7上可根据该装置配合使用的机器人的需要实现360
°
旋转。
30.所述的肢体延长板2为500mm*250mm的长方形碳纤维板。所述的肢体延长板2一端通过固定装置1与手术床相连接,肢体延长板2的另一端底部与支撑杆8的上端相螺纹连接,
支撑杆8的下端支撑在地面上。通过设置肢体延长板2,增加了患者手腕的稳定性,提高了机器人手术的精准度,保证了手术的顺利进行。
31.所述的支撑杆8包括套筒8
‑
3,套筒8
‑
3的下端固定在底座8
‑
4上,套筒8
‑
3内套接有伸出杆8
‑
1,伸出杆8
‑
1的上端与肢体延长板2底部相垂直且固定连接。套筒8
‑
3侧壁上开设有螺纹孔,该螺纹孔中安装有第二紧定螺钉8
‑
2。通过松开第二紧定螺钉8
‑
2,手动调节伸出杆8
‑
1的伸出长度,当伸出杆8
‑
1与套筒8
‑
3之间的相对位置达到要求后,再拧紧第二紧定螺钉8
‑
2,以实现调节肢体延长板2高度的目的。
32.如图2所示,所述的固定装置1包括包括夹持件1
‑
6、螺杆1
‑
3和压块1
‑
4。所述夹持件1
‑
6上设有水平的顶板和位于顶板下方的导向槽1
‑
5,所述压块1
‑
4与所述导向槽1
‑
5相配合。所述螺杆1
‑
3穿过所述夹持件1
‑
6底部的螺纹孔后,与所述压块1
‑
4相转动连接,以驱动所述压块1
‑
4沿导向槽1
‑
5上下移动,进而实现肢体延长板2与手术床的边缘相夹紧固定。所述的螺杆1
‑
3下端还连接有调节手柄1
‑
2,以便通过手动转动调节手柄1
‑
2旋转螺杆1
‑
3。
33.所述的固定装置1还包括方管1
‑
7和套管1
‑
8,方管1
‑
7的上端与肢体延长板2一端的底部相垂直且固定连接,套管1
‑
8固定在夹持件1
‑
6的背侧,套管1
‑
8与方管1
‑
7滑动配合。另如图1所示,套管1
‑
8侧壁上开设有螺纹孔,该螺纹孔中安装有第一紧定螺钉1
‑
1。通过松开第一紧定螺钉1
‑
1,手动调节方管1
‑
7与套管1
‑
8之间的相对位置,当达到适宜位置后,再拧紧第一紧定螺钉1
‑
1,以实现调节手术床和肢体延长板2之间相对高度的目的。
34.本实用新型所述的腕舟骨骨折手术辅助装置,其使用方法如下:
35.通过转动调节手柄1
‑
2调节螺杆1
‑
3,使肢体延长板2与手术床夹紧固定。将患者手腕通过绷带或弹力筋固定在腕部固定器顶部的直角外侧,保持手腕呈背伸90
°
放置,手腕患处进行皮肤消毒。将示踪器6安装在固定杆7上,保证手腕与示踪器6之间相对位置的固定。将腕部固定器通过绷带缠绕进一步固定在肢体延长板2上,使肢体延长板2与固定板4相平行,第一平板3和第二平板5的下边缘与肢体延长板2顶面相接触。通过调整方管1
‑
7和伸出杆8
‑
1,使肢体延长板2达到适宜高度。
36.启动本装置配套使用的“天玑”骨科机器人,“天玑”骨科机器人通过追踪确认示踪器6的位置,进而判断患者手腕患处的位置。若采用“闭合复位经皮钢针内固定”的治疗方式,“天玑”骨科机器人先规划钢针或钛针的进针位置,再通过电钻打入直径为1.5mm的钢针或钛针,取出钻头后即可完成手术。若采用“闭合复位经皮空心钉内固定”的治疗方式,则需在钢针或钛针打入后,继续用钻头在患者手腕患处钻孔,待取出钻头后,再扭入直径为3.0mm的空心钉,方为手术完成。
37.通过绷带或弹力筋将患者手腕背伸90
°
固定在腕部固定器上,实现了患者手腕与示踪器6相对位置的固定,同时减少了手术创伤,防止了x射线给患者和医务人员的身体带来伤害,缩短了手术时间,提高了手术效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1