一种助老起卧的自动床
1.本实用新型涉及一种辅助床,具体是涉及一种助老起卧的自动床。
背景技术:
2.随着社会的发展,人口老龄化现象越来越严重,近年老年人口数不断增加,目前无论是在医院、疗养院和养老院中,还是在一般家庭中,供老人休息调养的床都是采用的最普通的单人床,然而这对于一些体弱的老人来说是极其不便的,只能在医护人员或者亲属的辅助下起卧,这极大程度地降低医护人员的工作效率;而且有时老人自行下床时易发生摔倒事故,这将严重威胁老人的身体安危,造成很大的安全隐患。
3.因此,需要一种新的技术方案以解决上述问题。
技术实现要素:
4.实用新型目的:针对以上缺点,本实用新型提供一种自动辅助老人起卧的自动床。
5.技术方案:为解决上述问题,本实用新型采用一种助老起卧的自动床,包括床架、床板,还包括驱动装置和角度调节装置,所述床架包括上支撑架和下支撑架,所述床板平铺于上支撑架,所述床板包括起身板和转向板,所述起身板一端与转向板一端铰接;
6.所述驱动装置固定于下支撑架上方,驱动装置包括第一电动伸缩杆和电机,所述第一电动伸缩杆输出端与转向板底端的中部固定连接,第一电动伸缩杆另一端与电机的输出轴固定连接,电机固定于下支撑架,所述角度调节装置用于调节起身板与转向板之间的角度。
7.有益效果:本实用新型相对于现有技术,其显著优点是通过角度调节装置抬起起身板从而抬起老人后背,使老人坐起,然后通过驱动装置将转向板抬起并转向垂直床边的位置,方便老人下床;老人上床时,坐到转向板上然后通过驱动装置转回,然后角度调节装置将起身板调平,实现老人起身与躺下的自动化,有效解决老人上下床困难问题,且该自动床结构简单,操作方便,成本低。
8.进一步的,还包括控制装置,所述控制装置用于控制驱动装置与角度调节装置。
9.进一步的,所述角度调节装置包括第二电动伸缩杆和挡板,所述挡板固定于起身板的底端,所述第二电动伸缩杆的输出端与挡板连接,且第二电动伸缩杆输出端与挡板相对转动;所述转向板底端固定设置有固定块,第二电动伸缩杆另一端与固定块连接,且第二电动伸缩杆与固定块相对转动。
10.进一步的,所述第一伸缩杆的输出端的端部设置凹槽,所述固定块位于凹槽中。
11.进一步的,还包括固定于下支撑架的主轴,所示第一电动伸缩杆固定端通过轴承与主轴连接,所述电机容纳于主轴内部且与主轴固定连接,电机输出端通过联轴器与轴承连接,第一电动伸缩杆相对主轴转动。
12.进一步的,所述床板还包括固定板,所述起身板、转向板、固定板依次平铺于上支撑架,固定板固定于上支撑架。
附图说明
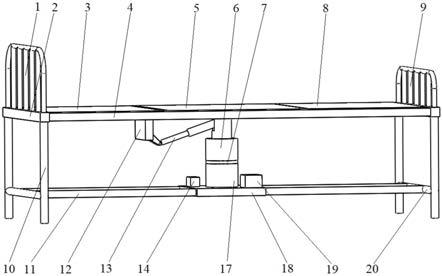
13.图1是本实用新型自动床的结构示意图;
14.图2是本实用新型自动床的主视图;
15.图3是本实用新型自动床的俯视图;
16.图4是本实用新型自动床起身状态的结构示意图;
17.图5是本实用新型中第一电动伸缩杆、联轴器和电机的连接示意图;
18.图6是本实用新型中第一电动伸缩杆、联轴器和电机的连接剖视图;
19.图7是本实用新型中起身板和转向板连接示意图;
20.图8是本实用新型中第二电动伸缩杆固定端的连接示意图。
具体实施方式
21.如图1至图4所示,本实施例中的一种助老起卧的自动床,包括床架、床板、驱动装置、角度调节装置和控制装置,所述床架包括上支撑架和下支撑架,所述床板平铺于上支撑架,所述床板包括起身板3、转向板5和固定板8,所述起身板3一端与转向板5一端铰接,转向板5另一端设置固定板8,所述固定板8与上支撑架固定连接;所述驱动装置固定于下支撑架上方并与转向板5底端的中部固定连接,驱动装置用于驱动转向板5的升降和旋转,角度调节装置用于调节起身板3与转向板5之间的角度,控制装置用于控制驱动装置和角度调节装置。
22.所述上支撑架包括支撑床板的两根主梁4、通过螺栓连接两根主梁4两端的两根上横梁2,两根上横梁2上分别固定焊接床头围栏1和床尾围栏9;床头围栏1位于起身板3一端,床尾围栏9位于固定板8一端;所述下支撑架包括分别与两根上横梁2平行的两根下横梁20,两个下横梁20之间通过连接轴11连接平台18;所述上支撑架和下支撑架通过四根支腿10固定连接,支腿10用于支撑整个床架。
23.如图5和图6所示,所述驱动装置包括第一电动伸缩6和电机16,第一电动伸缩杆6的输出端与转向板5底端的中部固定连接,第一电动伸缩杆6的伸缩带动转向板5的升降,第一电动伸缩杆6的底端与轴承7内圈固定连接,轴承7下方设置主轴17,主轴17与轴承7的外圈固定连接,主轴17中空且固定于平台18上,保证第一电动伸缩杆6与转向板5能相对主轴17转动;电机16通过螺栓固定于主轴17内,电机16的输出轴通过联轴器15与轴承7内圈固定连接,电机16带动第一电动伸缩杆6与转向板5转动,如图7所示,铰接在转向板5一端的起身板3跟随转向板5的转动而转动。
24.角度调节装置包括第二电动伸缩杆13和挡板12,挡板12竖直固定焊接于起身板3底端,挡板12下端固定设置固定块,第二电动伸缩杆13的输出端与固定块通过销连接,第二电动伸缩杆13相对固定块转动,如图8所示,转向板5底端同样设置有固定块,第一电动伸缩杆6的输出端的端部设置凹槽,所述转向板5底端的固定块位于凹槽中,所述第二电动伸缩杆13的固定端与转向板5底端的固定块通过销连接,第一电动伸缩杆6的端部设置凹槽避免第二电动伸缩杆13运动时发生干涉现象,第二电动伸缩杆13伸长推动挡板12,从而推动起身板3绕着铰链转动,达到起身板3辅助老人起身或者躺下的目的。
25.控制装置包括胶接固定于平台18上的数据传输与控制模块14和遥控器,数据传输与控制模块14接收遥控器的无线信号,并将信号传输给驱动装置和角度调节装置。平台18
上设置电源19,电源19用于给第一电动伸缩杆6、第二电动伸缩杆13、数据传输与控制模块14和电机16供电。
26.本实施例中一种助老起卧的自动床的实施步骤:
27.首先接通电源19,当老人躺在床上想下床时,先按下遥控器上的起身按钮,数据传输与控制模块14接收遥控器的信号控制第二电动伸缩杆13伸长,在本实施例中,每按一次起身按钮,第二电动伸缩杆13伸长0.1米;第二电动伸缩杆13伸长推动挡板12,从而推动起身板3绕转向板5转动,起身板3辅助老人抬起后背坐在床上。然后按下遥控器上的提升按钮,数据传输与控制模块14接收遥控器的信号控制第一电动伸缩杆6伸长,在本实施例中,每按一次提升按钮,第一电动伸缩杆6伸长0.1米;第一电动伸缩杆6伸长使转向板5和起身板3向上提升,将转向板5提升至高度高于固定板8和主梁4。接下来按下遥控器上的转向按钮,数据传输与控制模块14接收遥控器的信号控制电机16正转,在本实施例中,电机16的转动速度为3转/分钟,转动90度需要5秒;电机16转动5秒带动转向板5和起身板3整体转动90度,使老人脚转向床边,便于老人下床,实现了老人从躺下到坐到床边的全自动化过程。
28.当老人想躺下时,将自动床调整到辅助老人下床后的状态,然后老人坐在转向板5上,背靠起身板3,再按下遥控器上的反转按钮,数据传输与控制模块14接收遥控器的信号控制电机16反转,电机16反转5秒带动转向板5和起身板3整体转动90度,使转向板5和起身板3转回主梁4的上方。然后按下遥控器上的下降按钮,使转向板5和起身板3下降回主梁4上,最后按下遥控器上的下躺按钮,第二电动伸缩杆13回缩,起身板3降下平铺在主梁4上,使老人躺下,实现了老人从坐在转向板5上到躺在床上的全自动化过程;最后关闭电源19。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1