多功能老人辅助床及电路
1.本实用新型涉及老年人辅助器械领域,具体涉及多功能老人辅助床及电路。
背景技术:
2.随着年龄的增加,进入老年后,身体机能迅速衰弱,特别是关节的活动能力变弱,导致许多的动作无法完成,特别是起床这样需要调用全身关节的动作,特别是存在关节疾病的老人起床特别的困难。
3.现在市面上存在辅助老人起床的辅助器械,但是上述器械都存在较大的弊端(即为老人起床不方便),专利号:202010159726 .5专利名称为一种老人助起床装置,上述专利通过第一床板向上倾倒达到辅助老人腰部弯曲起床,但是老人的脚依旧放置在床板上,老人起床的时候需要弯脚,并通过用脚来使自身旋转90度,这样达到侧起床的效果,老人使用起来极为的不方便。
4.专利号:201621444839.5专利名称为一种老年保健康功能床,上述专利通过抬腿曲膝模块、上半身仰起下落模块将老人的腿部弯曲与肩部抬起来,但是上述装置抬腿曲膝模块是将老人的腿部向上抬,老人需要转动自己才能起到起床的效果,同时抬腿曲膝模块将老人的膝盖上抬,虽然起来到的腿部弯曲的作用,但是老人依旧是躺在床板上的,这样辅助老人起床的作用微乎其微,不便于辅助老人起床。
技术实现要素:
5.针对上述现有技术的不足,本实用新型提出了多功能老人辅助床及电路,便于将老人的肩部托起与脚部下降,这样将床体变成座椅状,这样便于老人起床,同时在变成座椅后,可以通过座椅的旋转实现老人侧起身,这样老人起床比较的方便,同时采用丝杠的方式驱动床板倾斜,这样便于保证老人起床时的安全;同时电机的启动与停止采用点触开关,这样老人可以根据自己的习惯使床板倾斜不同的角度;同时还能进行老人的左、右翻身,这样便于老人起床。
6.为实现上述目的,本实用新型的方案:多功能老人辅助床,包括床中架、上半身托举机构、腿部弯曲下垂机构与旋转机构,在床中架的两端分别设置有上半身托举机构与腿部弯曲下垂机构,在上半身托举机构与腿部弯曲下垂机构下方设置有床体支撑组件,床体支撑组件包括床头支撑框架与床脚支撑框架,在腿部弯曲下垂机构下方的床脚支撑框架上设置有让床脚支撑框架下降的摆动机构,通过支撑组件对上半身托举机构与腿部弯曲下垂机构进行支撑;在床中架的下方设置有旋转机构,通过旋转机构带动床中架旋转,同时床中架带动上半身托举机构与腿部弯曲下垂机构同步旋转,床头支撑框架、床脚支撑框架与旋转机构均设置在床座上,床座固定在地面上;在上半身托举机构与腿部弯曲下垂机构上分别设置有行程开关,通过行程开关限制上半身托举机构与腿部弯曲下垂机构的位置,在上半身托举机构与床中架上设置有侧身机构,通过侧身机构使老人进行侧身。
7.优选地,上半身托举机构包括床头架、固定框架、上半身推举丝杠与第一驱动电
机,其中床头架铰接在床中架的其中一端上,在床头架的外周设置有固定框架且固定框架固定在床中架上,在固定框架上固定有上半身推举丝杠,其中上半身推举丝杠的其中一端与第一驱动电机固定,上半身推举丝杠的螺母与床头架底部之间设置有第一支撑杆且第一支撑杆的两端分别与上半身推举丝杠的螺母、床头架底部铰接。
8.优选地,侧身机构设置在床中架与床头架上,其中床中架与床头架的两侧均通过铰接的方式固定有翻身板,每块翻身板与对应的床中架与床头架之间设置有对应的翻身模块,在床中架与床头架的底部分别固定有对应的固定架,在每个固定架与对应的翻身板之间铰接有翻身模块,翻身模块分为两组且位于同一侧的翻身板与对应的翻身模块进行连接,通过两组翻身模块实现对老人的左侧翻身与右侧翻身。
9.优选地,腿部弯曲下垂机构包括床尾架、腿部下垂丝杠、第二支撑杆与第二驱动电机,床尾架与床中架中远离上半身托举机构的一端铰接,在床中架底部固定有腿部下垂丝杠且腿部下垂丝杠竖直设置,在腿部下垂丝杠底端固定有第二驱动电机,在腿部下垂丝杠的螺母与床尾架之间设置有第二支撑杆,第二支撑杆一端与床尾架通过铰接的方式进行连接,第二支撑杆的另外一端与腿部下垂丝杠的螺母铰接;腿部弯曲下垂机构下方摆动组件包括第三丝杠、第三支撑杆与第三驱动电机,其中床脚支撑框架底部与床座铰接,在床脚支撑框架与床座之间还设置有第三丝杠,第三丝杠的其中一端固定有驱动第三丝杠运动的第三驱动电机,在第三丝杠的螺母与床脚支撑框架之间设置有第三支撑杆,在第三支撑杆的一端与床脚支撑框架通过铰接的方式进行,第三支撑杆的另外一端通过铰接的方式进行连接;第三丝杠两端丝杠座上分别通过螺栓紧固的方式固定有两个第三行程开关。
10.优选地,旋转机构包括旋转轴、齿轮箱与旋转电机,其中旋转轴的顶部固定在床板上,旋转轴的底部通过轴承固定在床座上,在床座上设置齿轮箱,旋转轴穿过齿轮箱且齿轮箱内的齿轮系驱动旋转轴转动,在齿轮箱的输入轴上固定有旋转电机;在旋转轴的外周边缘上设置有两个第四行程开关,在旋转轴上固定触发第四行程开关的触发块,触发块在两个第二行程开关之间转动,两个第四行程开关之间的弧度即为旋转轴的转动空间。
11.优选地,在每个支撑组件的顶部设置有橡胶垫,在床头架与床尾架底部均设置有与橡胶垫相配合的橡胶套,当床头架与床尾架水平设置的时候,橡胶垫侵入到橡胶套内。
12.优选地,在每组翻身模块上设置有两个第五行程开关且两个第五行程开关上下设置,通过两个第五行程开关现在翻身模块翻身的弧度。
13.基于老人起床辅助装置的电路,第一驱动电机、第二驱动电机、第三驱动电机与旋转电机分别连接有电机正反转无线控制模块,第一驱动电机与电机正反转无线控制模块进行连接,电机正反转无线控制模块控制第一驱动电机的正/反转,在电机正反转无线控制模块的正限位、反限位引脚分别与两个第二行程开关进行连接,通过第一行程开关反馈的信号控制第一驱动电机立即停止转动;第二驱动电机、第三驱动电机、旋转电机单独与对应的电机正反转无线控制模块进行连接,第二驱动电机、第三驱动电机、旋转电机与电机正反转无线控制模块的连接方式和第一驱动电机与电机正反转无线控制模块的连接方式一致,在与第二驱动电机连接的电机正反转无线控制模块的正限位、反限位引脚与两个第二行程开关、两个第三行程开关进行连接,当右端第三行程开关触发的时候,第二驱动电机才能使床尾架下降,与旋转电机相互连接的电机正反转无线控制模块的正限位、反限位引脚上连接有两个第四行程开关,通过第四行程开关限定旋转轴的旋转位置;每个翻身模块正极与负
极通过导线与两个变压器进行连接,每个翻身模块的正极分别与一个变压器的正极与另外一个变压器的负极进行连接,每个翻身模块的负极分别与一个变压器的负极与另外一个变压器的正极进行连接,在每个变压器连接的两根导线上设置有一组继电器且每个变压器上的一组继电器相互联动;同一个翻身模块上的两组继电器相互并联且两组继电器同样连接有电机正反转无线控制模块,另外一组翻身模块位于底部的第五行程开关、位于右端的第一行程开关与该翻身模块位于顶部及底部的两个第五行程开关与对应电机正反转无线控制模块的正限位、反限位引脚进行连接,其中每组电机正反转控制模块与变压器均通过导线连接在电源上;每组电机正反转控制模块均通过无线模块与遥控器进行连接,通过遥控器控制多个机构的运行。
14.与现有技术相比,本实用新型的优点在于:
①
通过丝杠驱动床板部分倾斜来辅助老人起床、通过侧身机构可以使老人进行侧身动作,这样便于老人翻身,通过电路控制实现各个机构的安全运行;
②
通过床板的旋转实现侧方位起身;
③
床头上升床尾下降可以单独启动,旋转动作需要在床头上升与床尾下降后才能启动旋转,这样可以根据老人自身需要实现床板执行那个动作,这样老人使用起来比较的方便,缩小床板的旋转范围;
④
通过橡胶使安装结构稳定并降低床板晃动时的噪音。
附图说明
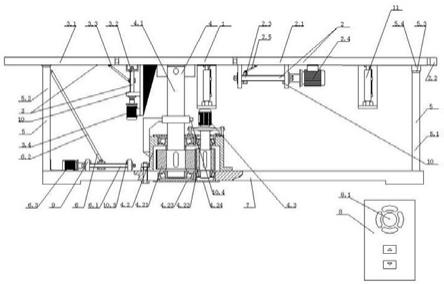
15.图1为本实用新型的主视图。
16.图2为本实用新型上半身托举机构的示意图。
17.图3为本实用新型腿部弯曲下垂机构的示意图。
18.图4为本实用新型旋转机构的示意图。
19.图5为本实用新型第四行程开关与旋转轴的位置示意图。
20.图6为本实用新型床中架、床头架上设置侧身机构的示意图。
21.图7为本实用新型的电路图。
22.其中,1、床中架,2、上半身托举机构,2.1、床头架,2.2、固定框架,2.3、上半身推举丝杠,2.4、第一驱动电机,2.5、第一支撑杆,3、腿部弯曲下垂机构,3.1、床尾架,3.2、腿部下垂丝杠,3.3、第二支撑杆,3.4、第二驱动电机,4、旋转机构,4.1、旋转轴,4.2、齿轮箱,4.21、大齿轮,4.22、小齿轮,4.23、大端盖,4.24、小端盖, 4.3、旋转电机,4.4、触发块,5、床体支撑组件,5.1、床头支撑框架,5.2、床脚支撑框架,5.3、橡胶垫,5.4、橡胶套,6、摆动机构, 6.1、第三丝杠,6.2、第三支撑杆,6.3、第三驱动电机,7、床座,8、遥控器,8.1、点触开关,9、丝杠座,10、行程开关,10.1、第一行程开关,10.2、第二行程开关,10.3、第三行程开关,10.4、第四行程开关,11、侧身机构,11.1、翻身板。
具体实施方式
23.现集合附图,对本发明进一步的阐述。
24.如图1
‑
7所述,多功能老人辅助床,包括,床座7、床中架1、上半身托举机构2、腿部弯曲下垂机构3与旋转机构4,在床中架1的左、右两端分别设置有腿部弯曲下垂机构3与上半身托举机构2,上半身托举机构2包括床头架2.1、固定框架2.2、上半身推举丝杠2.3与第一驱动电机2.4,其中床头架2.1通过合页铰接在床中架1的右端上,这样床头架2.1可以相
对于床中架1发生相对转动并形成夹角,在床中架1的外周边缘上通过焊接的方式固定有固定框架2.2(这样保证结构的稳定)且固定框架2.2固定在床中架1上(固定框架2.2为矩形框架,床中架1的前后两侧的边缘上通过焊接的方式将矩形框架固定且矩形框架向右侧延伸),这样在床头架2.1转动的时候,固定框架2.2不会产生转动,固定框架2.2作为床头架2.1转动时的受力支点。
25.在固定框架2.2上固定有上半身推举丝杠2.3(上半身推举丝杠2.3的两端通过丝杠座9进行固定,丝杠座9通过螺栓锁止在固定框架2.2上),其中上半身推举丝杠2.3的其中一端与第一驱动电机2.4固定(第一驱动电机2.4通过螺栓固定在固定框架2.2上,上半身推举丝杠2.3的右端通过联轴器与第一驱动电机2.4的输出轴进行固定连接),上半身推举丝杠2.3的螺母与床头架2.1底部之间设置有第一支撑杆2.5且第一支撑杆2.5的两端分别与上半身推举丝杠2.3的螺母、床头架2.1底部通过铰链的方式进行铰接,老人在起床的时候,需要上半身慢慢起身,本装置通过第一驱动电机2.4驱动上半身推举丝杠2.3转动,上半身推举丝杠2.3在转动的时候会带动丝杆上的螺母在上半身推举丝杠2.3上移动,当上半身推举丝杠2.3上的螺母向右运动的时候,第一支撑杆2.5推动床头架2.1逆时针转动,这样床头架2.1推动老人的上半身慢慢起身。
26.腿部弯曲下垂机构3包括床尾架3.1、腿部下垂丝杠3.2、第二支撑杆3.3与第二驱动电机3.4,床尾架3.1与床中架1中远离上半身托举机构2的一端(床中架1左端)铰接,在床中架1底部通过丝杠座9固定有腿部下垂丝杠3.2(丝杠座9通过螺栓固定在床中架1底部)且腿部下垂丝杠3.2竖直设置,在腿部下垂丝杠3.2顶部通过联轴器连接的方式固定有第二驱动电机3.4,在腿部下垂丝杠3.2的螺母与床尾架3.1之间设置有第二支撑杆3.3,第二支撑杆3.3一端与床尾架3.1通过铰链的方式进行,第二支撑杆3.3的另外一端与腿部下垂丝杠3.2的螺母通过铰链进行铰接,老人在起床的时候需要将脚下垂并靠近地面,在第二驱动电机3.4带动腿部下垂丝杠3.2,腿部下垂丝杠3.2带动螺母向下运动,这样第二支撑杆3.3向下移动,这样床尾架3.1在第二支撑杆3.3的作用下慢慢逆时针转动,这样老人的腿部慢慢下垂并靠近地面。
27.在上半身托举机构2与腿部弯曲下垂机构3均设置有床体支撑组件5,床体支撑组件5包括床头支撑框架5.1与床脚支撑框架5.2,床头支撑框架5.1与床脚支撑框架5.2(床头支撑框架5.1与床脚支撑框架5.2均为矩形框架)分别位于床座7的左、右两端且两个床头支撑框架5.1与床脚支撑框架5.2竖直设置,在上半身托举机构2下方设置有床头支撑框架5.1,床头支撑框架5.1通过焊接的方式固定在床座7的右端上,在腿部弯曲下垂机构3下方的床脚支撑框架5.2上设置有让床脚支撑框架5.2下降的摆动机构6,摆动机构6包括第三丝杠6.1、第三支撑杆6.2与第三驱动电机6.3,其中床脚支撑框架5.2底部与床座7通过合页进行铰接(床脚支撑框架5.2进行摆动来降低床脚支撑框架5.2顶部的高度),在床脚支撑框架5.2与床座7之间还设置有第三丝杠6.1,第三丝杆6.1通过丝杠座9固定在床座7上且丝杠座9通过螺栓固定在床座7上,第三丝杠6.1的其中一端通过联轴器固定有驱动第三丝杠6.1运动的第三驱动电机6.3,在第三丝杠6.1的螺母与床脚支撑框架5.2之间设置有第三支撑杆6.2,在第三支撑杆6.2的一端与床脚支撑框架5.2通过铰链铰接的方式进行连接,第三支撑杆6.2的另外一端通过铰接的方式进行连接,通过支撑组件5对上半身托举机构2与腿部弯曲下垂机构3进行支撑,在床尾架3.1需要下摆的时候,需要将床座7左端的床脚支撑框架
5.2向下摆动(顺时针转动),这样通过摆动机构6使位于左端的支撑组件5顺时针转动完成下摆的动作,这样对床尾架3.1进行让位。
28.在床中架1的下方设置有旋转机构4,旋转机构4包括旋转轴4.1、齿轮箱4.2与旋转电机4.3,旋转轴4.1的顶部设置有圆盘,在圆盘底部开有与旋转轴4.1相配合的孔且圆盘底部的孔与旋转轴4.1顶部为过渡配合,圆盘与旋转轴4.1通过平板键进行连接并传递转矩,这样旋转轴4.1带动圆盘转动,圆盘通过螺栓连接的方式固定在床中架1的底部,圆盘带动床中架1转动,旋转轴4.1的底部通过轴承固定在床座7上,在床座7通过螺栓固定有齿轮箱4.2(在齿轮箱4.2内设置有大齿轮4.21、小齿轮4.22、大端盖4.23与小端盖4.24,其中齿轮箱4.2通过螺栓固定在床座7上,在齿轮箱4.2内设置的大齿轮4.21与小齿轮4.22,大齿轮4.21与旋转轴4.1孔轴配合,在孔轴配合处插入平板键进行固定,小齿轮4.22与大齿轮4.21相互啮合,在小齿轮4.22上通过孔轴配合的方式固定有输入轴,输入轴通过轴承固定在齿轮箱4.2上,通过输入轴向上延伸并穿过齿轮箱4.2,在旋转轴4.1底部的齿轮箱4.2上通过螺栓固定有将轴承端部封闭其起来的大端盖4.23,在输入轴底部的齿轮箱4.2上通过螺栓固定有将轴承端部封闭起来的小端盖4.24),旋转轴4.1穿过齿轮箱4.2且齿轮箱4.2内的大齿轮4.21带动旋转轴4.1转动,在齿轮箱4.2的输入轴上通过联轴器固定有旋转电机4.3(齿轮箱4.2的输入轴与旋转电机4.3的输出轴通过联轴器进行固定连接,旋转电机4.3通过焊接的方式固定在齿轮箱4.2的外壁上),通过旋转机构4带动床中架1旋转,同时床中架1带动上半身托举机构2与腿部弯曲下垂机构3同步旋转,支撑组件5与旋转机构4均设置在床座7上,床座7的底部通过螺栓固定有带刹滚轮,床座7放置在地面上;在旋转轴4.1的外周边缘上设置有两个第四行程开关10.4,在旋转轴4.1上通过焊接的方式固定触发第四行程开关10.4的触发块4.4,触发块4.4在两个第四行程开关10.4之间转动,两个第四行程开关10.4之间的弧度即为旋转轴4.1的转动空间,两个第四行程开关10.4通过焊接的方式固定在环形架上,在环形架通过焊接的方式固定在床座上,当触发块4.4与左端的第四行程开关10.4接触的时候,床中架1横向设置,当触发块4.4与右端的第四行程开关10.4接触的时候,床中架1与床座垂直设置。
29.在老人进行起床的时候,主要使床头架2.1与床尾架3.1发生偏转(即为床头上升、床尾下降),这样通过床头架2.1与床尾架3.1发生偏转辅助老人起床;第一驱动电机2.4、第二驱动电机3.4、第三驱动电机6.3与旋转电机4.3的电源开关为点触开关8.1(点触开关8.1即为安县就导通,松开就断开中断的按键开关)且点触开关8.1固定在可以移动式的遥控器8上(第一驱动电机2.4、第二驱动电机3.4、第三驱动电机6.3与旋转电机4.3的电源开关与遥控器8上的点触开关8.1通过无线模块进行连接,通过无线模块传递信号,第一驱动电机2.4、第二驱动电机3.4、第三驱动电机6.3与旋转电机4.3均为步进电机,可以直接通过遥控器8控制第一驱动电机2.4、第二驱动电机3.4、第三驱动电机6.3与旋转电机4.3转动与停止),这样当老人按下某一个点触开关8.1的时候,这个点触开关8.1所对应的电机开始工作,当没有按下点触开关8.1的时候,电机停止工作,这样老人可以根据自身的情况来使辅助起床装置执行不同的动作,这样老人使用起来比较的方便,如老人喜欢先曲腿,然后将上半身立起来,这样可以通过按钮驱动第三驱动电机6.3工作,然后第二驱动电机3.4工作,再按下第二按钮使第一驱动电机2.4工作,这样老人先完成曲腿动作,然后将上半身立起来,最后按下按钮使旋转电机4.3工作,这样床板旋转90度实现车侧起身(一般中国人将鞋与衣
物放置在床侧,这样侧起身便于老人穿戴衣物与穿鞋子),旋转电机4.3在断电时发生自锁,这样保证在旋转电机4.3没有通电的时候进行自锁,这样保证老人的安全(在没有通电的时候,床板不会发生转动,保证老人的安全),同时采用丝杠驱动床头架2.1与床尾架3.1转动,这样保证老人起床的安全。
30.在上半身托举机构2与床中架1上设置有侧身机构11,通过侧身机构11使老人进行侧身;侧身机构11设置在床中架1与床头架2.1上,其中床中架1与床头架2.1的前后两侧均通过铰接的方式固定有翻身板11.1,每块翻身板11.1与对应的床中架1与床头架2.1之间设置有对应的翻身模块,在床中架1与床头架2.1的底部分别焊接的方式固定有对应的固定架,在每个固定架与对应的翻身板11.1之间铰接有翻身模块(翻身模块即为电动推杆,通过电动推杆的伸缩实现翻身板旋转,这样实现对老人进行左右翻身),翻身模块分为两组且位于同一侧的翻身板11.1与对应的翻身模块进行铰接(翻身板11.1的底部与电动推杆的中的推杆顶部进行铰接),每组翻身模块同步伸缩,这样实现同一侧的翻身板11.1同步旋转来实现对老人的翻身,通过两组翻身模块实现对老人的左侧翻身与右侧翻身;在每组翻身模块上设置有两个第五行程开关且两个第五行程开关上下设置(在电动推杆的筒状外壁上通过焊接的方式固定有两个第五行程开关且两个第五行程开关上下设置,在电动推杆的推杆上通过焊接的方式固定有连接杆11.4且连接杆11.4的末端通过焊接的方式位于两个第五行程开关之间,通过推杆的顶出与回缩实现触发两个第五行程开关(推杆的顶出与回缩带动连接杆在两个第五行程开关之间来回移动),通过两个第五行程开关限制翻身模块翻身的弧度,这样控制翻身板11.1转动的弧度,同时感应现在翻身板11.1的位置,这样便于控制翻身板11.1转动的位置。
31.行程开关10(型号为d5c
‑
1dao接触开关,第一行程开关10.1、第二行程开关10.2第三行程开关10.3、第四三行程开关10.4与第五行程开关均为d5c
‑
1dao接触开关)包括第一行程开关10.1、与第二行程开关10.2与第三行程开关10.3,在上半身托举机构2两端的丝杠座9上通过螺栓紧固的方式分别固定有第一行程开关10.1且两个第一行程开关10.1朝向上半身推举丝杠2.3的螺母,当上半身推举丝杠2.3上的螺母向右运动并接触上半身推举丝杠2.3右端的第一行程开关10.1的时候,上半身推举丝杠2.3右端的第一行程开关10.1被触发,这样表示老人的上半身完成去起床的动作,当上半身推举丝杠2.3上的螺母向左运动并接触到左端的第一行程开关10.1,这样上半身推举丝杠2.3左端的第一行程开关被触发,这样表示床头架2.1处于水平状态,同时两个第一行程开关10.1可以限制床头架2.1倾斜的角度,同时也能感应到床头架2.1现在所处的状态(即为床头架2.1倾斜或者水平);腿部弯曲下垂机构3上、下两端的丝杠座9上均通过螺栓紧固的方式固定有两个第二行程开关10.2且两个第二行程开关10.2朝向腿部下垂丝杠3.2的螺母,当腿部下垂丝杠3.2上的螺母向下运动并接触第二行程开关10.2的时候,腿部下垂丝杠3.2下端的第二行程开关10.2被触发,当腿部下垂丝杠3.2的螺母向上运动并接触腿部下垂丝杠3.2上端的第二行程开关10.2的时候,腿部下垂丝杠3.2上端的第二行程开关10.2被触发,这样表示床尾架3.1位于水平状态,这样通过两个第二行程开关10.2限制床尾架3.1倾斜角度,并通过第二行程开关10.2得到床尾架3.1现在的状态;位于右侧的第一行程开关10.1与位于下侧的第二行程开关10.2通过导线与旋转电机4.3的电源开关进行连接,当位于右侧第一行程开关10.1、位于下侧第二行程开关10.2以及控制旋转电机4.3的点触开关8.1同时被触发的时候,旋转电机4.3才能
开始工作,这样实现需要老人先起身才能进行床板进行旋转,这样可以防止床头架2.1、床尾架3.1还没有倾斜的时候而开始旋转;第三丝杠6.1两端丝杠座9上分别通过螺栓紧固的方式固定有两个第三行程开关10.3,两个第三行程开关10.3限制第三丝杠6.1上螺母的位置,当第三丝杠6.1上螺母向右运动的时候,第三丝杠6.1上螺母会接触并触发第三丝杆6.1右侧的第三行程开关10.3,当第三丝杠6.1上螺母向左运动的时候,第三丝杠6.1上螺母会接触并触发第三丝杆6.1左侧的第三行程开关10.3,这样通过第三行程开关10.3得到床脚支撑框架5.2的状态(即为床脚支撑框架5.2倾斜避让床尾架3.1或者床脚支撑框架5.2竖立支撑床尾架3.1),其中每个第一行程开关10.1、与第二行程开关10.2、第三行程开关10.3、第一驱动电机2.4的电源开关、第二驱动电机3.4的电源开关、第三驱动电机6.3的电源开关、旋转电机4.3的电源开关均与电机正反转控制模块进行连接(电机正反转控制模块的产品型号:kgs
‑
zf30
‑
1,同时配套有相应的遥控器控制电机的正转与反转),电机正反转控制模块通过无线模块接收遥控器8的信号,电机正反转控制模块接收第一行程开关10.1、与第二行程开关10.2、第三行程开关10.3的信号,同时电机正反转控制模块根据信号控制第一驱动电机2.4的电源开关、第二驱动电机3.4的电源开关、第三驱动电机6.3的电源开关与旋转电机4.3的电源开关的导通与中断(即为第一驱动电机2.4、第二驱动电机3.4、第三驱动电机6.3与旋转电机4.3开启与停止)。
32.第一驱动电机(m1)、第二驱动电机(m2)、第三驱动电机(m3)与旋转电机(m4)分别连接有电机正反转无线控制模块(每个电机正反转无线控制模块控制第一驱动电机(m1)、第二驱动电机(m2)、第三驱动电机(m3)与旋转电机(m4)电流的导通与电流的流向,这样实现单个电机正反转无线控制模块控制单个电机的启动与停止,还有控制多个电机转动的方向(改变电流的流向即为控制电机转动的方向),第一驱动电机(m1)与电机正反转无线控制模块进行连接,与第一驱动电机(m1)相互连接的电机正反转无线控制模块的正限位与反限位引脚上分别与两个第一行程开关(右端的第一行程开关为(sq1)且第一行程开(sq1)与正限位引脚连接,左端的第一行程开关为(sq2)且第一行程开关(sq2)与反限位引脚进行连接)进行连接,通过第一行程开关(sq1、sq2)限制第一驱动电机(m1)转动的最大角度,当第一行程开关(sq1)被触发的时候,表示床头架的位置位于最高点(床头架倾斜角度),这样第一驱动电机(m1)无法继续向上摆动(即为第一驱动电机(m1)无法正转只能反转),当第一行程开关(sq2)被触发的时候,表示床头架的位置位于最低点(床头架水平放置),这样第一驱动电机(m1)无法继续向下摆动(即为第一驱动电机(m1)无法反转只能正转),(当第一行程开关(sq1)与第一行程开关(sq2)均未被触发的时候,这样第一驱动电机(m1)可以自由的正反转);第二驱动电机(m2)、第三驱动电机(m3)、旋转电机(m4)分别与对应的电机正反转无线控制模块进行连接(电机正反转无线控制模块的输出端分别与第二驱动电机(m2)、第三驱动电机(m3)、旋转电机(m4)通过导线进行连接),第二驱动电机(m2)、第三驱动电机(m3)、旋转电机(m4)与电机正反转无线控制模块的连接方式和第一驱动电机(m1)与电机正反转无线控制模块的连接方式一致,与第二驱动电机(m2)相互连接的电机正反转无线控制模块的正限位与反限位引脚上分别连接有两个第二行程开关(下端的第二行程开关为(sq3)且第二行程开关(sq3)与正限位引脚连接,上端的第二行程开关为(sq4)且第二行程开关(sq4)与反限位引脚连接)、两个第三行程开关(左端的第三行程开关为sq17,右端的第三行程开关为sq18)进行连接,当右端第三行程开关(sq18)触发的时候(即为床脚支撑框架向右
摆动且床脚支撑框架对床尾架进行让位后,第三行程开关(sq18)被触发),第二驱动电机(m2)才能使床尾架下降(即为床脚支撑框架向下摆动对床尾架进行让位,这样床尾才能进行下摆倾斜),当床脚支撑框架下摆的时候,由于右端的第三行程开关(sq18)被触发的时候,表示床脚支撑框架下摆带极限位置,这样电机正反转无线控制模块可以控制第二驱动电机(m2)带动床尾架向下摆动,当床尾架向下摆动并触发第二行程开关(sq4)的时候,电机正反转无线控制模块控制第二步进电机停止转动并无法继续向下摆动,这时候电机正反转无线控制模块控制可以控制第二驱动电机(m2)向上摆动,当床尾架向上摆动并触发第二行程开关(sq3)的时候,电机正反转无线控制模块控制第二步进电机停止转动并无法继续向上摆动,通过当第二行程开关(sq3)的时候,电机正反转无线控制模块可以控制第三驱动电机(m3)向上摆动并对床尾架进行支撑;与旋转电机(m4)相互连接的电机正反转无线控制模块的正限位与反限位引脚上连接有两个第四行程开关(位于右侧的第四行程开关为sq5,位于左端的第四行程开关为sq6),两个第四行程开关通过焊接的方式固定在环形架上(两个第四行程开关(sq5、sq6)的夹角为90度),在环形架通过焊接的方式固定在床座上,当触发块与左端的第四行程开关(sq6)接触的时候,床中架横向设置,电机正反转无线控制控制旋转电机(m4)立即停止向左转动且无法向左转动,当触发块与右端的第四行程开关(sq6)接触并触发的话(第四行程开关(sq6)触发,电机正反转无线控制控制旋转电机(m4)立即停止向右转动且无法向右转动),床中架与床座垂直设置(老人侧方向下床),床体的转动,这样实现老人起床的侧起身,通过第四行程开关限定旋转轴的旋转位置,同时感应旋转轴的位置;每个翻身模块正极与负极通过导线与两个变压器进行连接(位于床中架前端的翻身模块为左翻身模块,位于床中架后端的右翻身模块,每个翻身模块(电磁推杆)的正极分出两条线分别与左侧变压器的正极、右侧变压器的负极进行连接,每个翻身模块的负极分出两条线分别与左侧变压器的负极、右侧变压器的正极进行连接),在每个变压器连接的两根导线上设置有一组继电器且每个变压器上的一组继电器相互联动(左翻身模块的上两组继电器为(km1与km2),右翻身模块的上两组继电器为(km3与km4),当km1导通的时候,左翻身模块将老人进行左翻身,km2导通,前侧的翻身板下降,失去对老人的翻身动作,当km3导通的时候,右翻身模块将老人进行右翻身,km4导通,后侧的翻身板下降,失去对老人的翻身动作),左翻身模块顶部的第五行程开关为sq10、左翻身模块底部的第五行程开关为sq11、右翻身模块顶部的第五行程开关为sq8、右翻身模块底部部的第五行程开关为sq7;同一个翻身模块上的两组继电器相互并联(km1与km2并联, km3与km4并联)且两组继电器同样连接有电机正反转无线控制模块(电机正反转无线控制模块控制电流的导通/断开及流向,通过电机正反转无线控制模块改变电磁推杆的正负极接通方式,这样实现通过电机正反转无线控制模块控制电磁推杆的伸缩),与继电器(km1)\继电器(km2)相互连接的电机正反转无线控制模块的正限位与反限位引脚上连接有左翻身模块上位于底部的第五行程开关(sq11)、右翻身模块位于底部的第五行程开关(sq7)、位于右端的第一行程开关(sq1)与左翻身模块位于顶部的第五行程开关(sq10),当需要左侧的翻身板从水平状态并向上转动的时候(即为继电器(km1)通电并闭合,这样电磁推杆(m5)向上推动),需要位于右端的第一行程开关(sq1)、右翻身模块位于底部的第五行程开关(sq7)与左翻身模块上位于底部的第五行程开关(sq11)需要被触发(床头架水平、右翻身模块没有工作且位于水平,同时右翻身模块同样位于水平状态的时候),这样左翻身模块上的电磁推杆(m5)向上推动左侧的翻身板向上摆
动,当左侧的翻身板继续向上摆动并触发到左翻身模块顶部第五行程开关(sq10),左翻身模块上的电磁推杆(m5)停止向上摆动且无法向上摆动,这样电机正反转无线控制模块仅能控制电磁推杆(m5)回缩使翻身板向下摆动(即为继电器(km2)通电并闭合,这样电磁推杆(m5)向下回缩),当翻身板向下摆动并触发左翻身模块上位于底部的第五行程开关(sq11)的时候,左翻身模块上的电磁推杆(m5)停止回缩,这样左侧的翻身板停止向下摆动且无法向下摆动,与继电器(km3)\继电器(km4)相互连接的电机正反转无线控制模块的正限位与反限位引脚上连接有右翻身模块上位于底部的第五行程开关(sq7)、左翻身模块位于底部的第五行程开关(sq11)、位于右端的第一行程开关(sq1)与右翻身模块位于顶部的第五行程开关(sq8),当需要右侧的翻身板从水平状态并向上转动的时候(即为继电器(km3)通电并闭合,这样电磁推杆(m6)向上推动),需要位于右端的第一行程开关(sq1)、左翻身模块位于底部的第五行程开关(sq11)与右翻身模块上位于底部的第五行程开关(sq7)需要被触发(床头架水平、左翻身模块没有工作且位于水平,同时右翻身模块同样位于水平状态的时候),这样右翻身模块上的电磁推杆(m6)向上推动右侧的翻身板向上摆动,当右侧的翻身板继续向上摆动并触发到右翻身模块顶部第五行程开关(sq8),右翻身模块上的电磁推杆(m6)停止向上摆动且无法向上摆动,这样电机正反转无线控制模块仅能控制电磁推杆(m6)回缩使翻身板向下摆动(即为继电器(km4)通电并闭合,这样电磁推杆(m6)向下回缩),当右侧翻身板向下摆动并触发右翻身模块上位于底部的第五行程开关(sq7)的时候,右翻身模块上的电磁推杆(m6)停止回缩,这样右侧的翻身板停止向下摆动且无法向下摆动;每组电机正反转控制模块均通过无线模块与遥控器上的按键进行连接(电机正反转控制模块与遥控器均通过市场购买的方式进行获得,只需要进行导向连接各个电气元件进行电路的导通),通过按键直接控制各个机构的运行,遥控器上的按键主要控制电机正反转控制模块电路的导通与控制各个电机正反的转动,电机正反转控制模块(产品型号为kgs
‑
zf10为购买来的,产品设置有正限位引脚、反限位引脚与电源引脚,只需要通过外接电机、电源与行程开关即可实现控制电机的正反转与电磁推杆的顶出与回缩,无需额外编写程序进行控制,产品型号为kgs
‑
zf10一般应用到卷闸门的开启与关闭上)。
33.在每个支撑组件5的顶部设置有橡胶垫5.3,在床头架2.1与床尾架3.1底部均设置有与橡胶垫5.3相配合的橡胶套5.4,当床头架2.1与床尾架3.1水平设置的时候,橡胶垫5.3侵入到橡胶套5.4内,利用橡胶来防止床头架2.1、床尾架3.1与床体支撑组件5之间的刚性摩擦而产生的噪音;同时采用橡胶进行榫接,这样便于保证结构的稳定性,同时也便于分离开来。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1