一种机器人辅助髋关节置换术中磨挫与敲击装置的制作方法
1.本实用新型涉及骨科关节置换技术领域,特别是涉及一种机器人辅助髋关节置换术中磨挫与敲击装置。
背景技术:
2.机器人辅助髋关节假体置换术是治疗髋关节病变的新技术与新趋势。该手术需要将患者体内已发生病变的股骨头取出,并安装上相应的髋臼垫块假体。安装假体前,必须将人体的髋臼窝进行磨削,直至符合髋臼假体的外形尺寸,再将髋臼杯放入髋臼窝内。
3.用于髋臼磨削的医疗器械是磨削杆,用于将髋臼杯敲入髋臼窝内的装置是敲击杆,髋臼锉与冲击工具均需植入一个操作组件内,并安装于机械臂末端执行器,实际步骤如下:在磨削步骤中,在磨削杆一端安装髋臼锉,另一端连接电钻,由医生通过操作组件控制髋臼锉在髋臼窝内进行旋转运动,直至打磨完成,旋转限位。在髋臼杯植入环节,需要将敲击杆安装于操作组件,再由医生将髋臼杯敲入髋臼窝内。
4.传统用于把持髋臼锉与冲击工具的操作组件,旋转同轴度较差,手术精度难以保证;此外,冲击工具安装时无法实现固定或旋紧,导致夹持不稳,甚至松动脱落,影响了手术效率。
技术实现要素:
5.本实用新型的目的在于提供一种机器人辅助髋关节置换术中磨挫与敲击装置,既可实现对髋臼窝的打磨也可以实现髋臼杯的安装。
6.本实用新型通过以下技术方案来实现上述目的:一种机器人辅助髋关节置换术中磨挫与敲击装置,包括:操作杆、限位组件以及滑动组件;所述限位组件包括若干根限位柱、相互配合的第一限位套筒和第二限位套筒,所述限位柱夹在所述第一限位套筒和第二限位套筒之间;所述操作杆上设有与所述限位柱下端部配合的环形槽;所述滑动组件包括滑动块、弹簧、后座以及拉动底座,所述滑动块包括同轴的第一套筒和第二套筒,所述第二套筒前端通过环形件与第一套筒内壁固定连接;所述第一套筒前端内壁与限位柱上端部相抵,第一套筒后端与所述后座套接为整体;所述第二套筒穿过所述后座与拉动底座套接;所述弹簧抵在所述环形件和后盖之间;所述操作杆穿过所述第一限位套筒、第二限位套筒、第一套筒、第二套筒、弹簧、后座以及拉动底座;当所述拉动底座向后拉动时,通过第二套筒带动第一套筒向后移动,所述限位柱上端部脱离第一套筒向上弹出,带动所述限位柱下端部脱离所述环形槽,操作杆从所述限位组件和滑动组件中间抽出。
7.进一步地,所述限位柱两端为半圆形结构,所述限位柱中部沿上下方向设有通孔,所述第二限位套筒沿轴线方向设有定位销,所述定位销穿过所述第二套筒插入所述通孔内。
8.进一步地,所述操作杆的环形槽轴向宽度与所述限位柱下端部相适应,所述限位柱下端部卡在所述环形槽两侧中间。
9.进一步地,所述操作杆第一端设有磨削杆锁头。
10.进一步地,所述第一套筒上设有用于采集磨削过程中产生的力和扭矩的力传感器,力传感器与其中一个所述限位柱上端相抵。
11.进一步地,还包括锁紧螺柱,所述锁紧螺柱位于所述拉动底座前方,穿过所述第二套筒筒壁,用于固定所述操作杆。
12.进一步地,所述操作杆的环形槽轴向宽度大于所述限位柱下端部宽度,在敲击过程中,所述限位柱相对操作杆在所述环形槽内滑动。
13.进一步地,所述拉动底座的上方设有限位标识。
14.进一步地,所述操作杆第二端与一敲击后座固定连接。
15.进一步地,还包括壳体与把手,所述壳体下端与把手连接,限位组件和滑动组件均位于壳体内部,所述操作杆与壳体同轴设置,所述操作杆通过导向套与壳体转动连接且沿壳体轴线方向移动。
16.与现有技术相比,本实用新型的有益效果如下:
17.1.限位套筒、限位柱及滑动块共同构成限位组件,实现对操作杆的限位功能;操作杆既可以是磨削杆又可以是敲击杆,二者还可以相互替换;在磨削杆作为操作杆置入的情况下,装置内部的限位组件通过限位柱下端卡住磨削杆的环形槽两侧,可保证髋臼锉绕几何中心轴旋转;在敲击杆作为操作杆置入模式下,敲击杆中段直径略窄,形成一个较长的环形槽,限位柱能够顶住该环形槽的一侧,从而实现物理的自锁结构,限制敲击杆的移动距离(轴向滑动)。
18.2.在敲击杆作为操作杆置入模式下,在敲击杆第二端设有两枚波珠螺丝,使得敲击杆底座与敲击杆相互固定。在后续髋臼杯安装过程中,使用者通过敲击杆底座敲击敲击杆,完成髋臼杯安置并同时使得敲击杆与髋臼杯分离。
19.3.滑动块下方安装有力传感器,可以收集到敲击和打磨时产生的力和扭矩,该数据将反馈至系统,进行限位与把持组件的功能扩展。如磨挫的力度及深度超出安全阈值,计算机将发出警示,使用者可调节电动工具转速及进给速度,从而提高髋臼表面打磨质量,同时降低手术风险。
20.4.具有快拆设计/装置(用于将磨削杆与敲击杆进行替换的情况),即拉动底座,可带动滑动块往后移动,限位柱往外侧弹出,敲击杆/磨削杆可抽出。
21.5.限位套筒具有定位销,方便安装限位柱,不用润滑油可以实现限位套筒的安装并固定,满足手术室使用条件。
附图说明
22.图1是限位与把持组件(1);
23.图2是图1中敲击杆示意图;
24.图3是限位与把持组件(2);
25.图4是图3中磨削杆示意图;
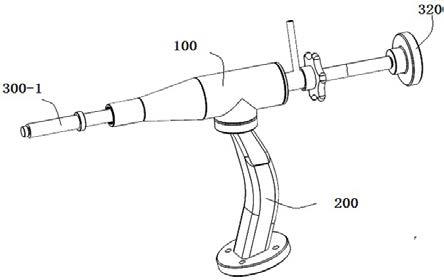
26.图5是限位组件和滑动组件安装在一起的示意图;
27.图6是图5的爆炸图。
具体实施方式
28.下面结合附图对本实用新型作进一步说明:
29.一种机器人辅助髋关节置换术中磨挫与敲击装置,包括:壳体100、把手300、操作杆300、限位组件、锁紧螺柱610以及滑动组件,壳体100下端与把手300连接,限位组件和滑动组件均位于壳体100内部,操作杆300穿过限位组件和滑动组件与壳体100同轴设置,操作杆300通过导向套与壳体100转动连接且沿壳体100轴线方向移动。用于关节置换的限位与把持组件中可以安装两种不同的操作杆,一种为敲击杆300
‑
1,另一种为磨削杆300
‑
2。敲击杆300
‑
1安装在限位与把持组件内,如图1和图2所示,磨削杆300
‑
2 安装在限位与把持组件内,如图3和图4所示。
30.如图5和图6所示,限位组件包括4根限位柱420、相互配合的第一限位套筒410和第二限位套筒430,4根限位柱420均匀设置在第一限位套筒410和第二限位套筒430之间。具体地,第一限位套筒410和第二限位套筒430的配合面上设有配合限位柱420的限位槽,限位柱420上端部伸出限位槽外。操作杆300上设有与限位柱420下端部配合的环形槽,限位柱420下端部伸入环形槽内。限位柱420两端为半圆形结构,限位柱420中部沿上下方向设有通孔,第二限位套筒430沿轴线方向设有定位销,定位销穿过第二套筒520 插入通孔内。第一套筒510上设有用于采集敲击/打磨过程中产生的力和扭矩的力传感器 710,力传感器510与其中一个所述限位柱上端相抵,力传感器710将采集的数据将反馈至系统,进行限位与把持组件的功能扩展,如磨挫的力度及深度超出安全阈值,计算机将发出警示,使用者可调节电动工具转速及进给速度,从而提高髋臼表面打磨质量,同时降低手术风险。限位套筒具有定位销,方便安装限位柱,不用润滑油可以实现限位套筒的安装并固定,满足手术室使用条件。
31.滑动组件包括滑动块、弹簧、后座以及拉动底座550,滑动块包括同轴的第一套筒510 和第二套筒520,第二套筒520前端通过环形件与第一套筒510内壁固定连接;第一套筒 510前端内壁与限位柱420上端部相抵,第一套筒510后端与后座套接为整体;第二套筒 520穿过后座与拉动底座550套接;弹簧抵在环形件和后盖之间。操作杆300穿过第一限位套筒410、第二限位套筒430、第一套筒510、第二套筒520、弹簧、后座以及拉动底座 550;当拉动底座550向后拉动时,通过第二套筒520带动第一套筒510向后移动,限位柱420上端部脱离第一套筒510向上弹出,带动限位柱420下端部脱离环形槽,操作杆300 从限位组件和滑动组件中间抽出。
32.敲击杆300
‑
1上开设的环形槽310
‑
1轴向宽度大于限位柱420下端部宽度,限位柱420 下端部与环形槽310
‑
1后侧相抵,操作杆300第二端与一敲击后座320固定连接。进一步地,敲击杆300
‑
1第二端为扁平状,沿径线方向安装有两枚波珠螺丝,波珠螺丝可在敲击杆第二端内弹性进出,敲击后座320上设有与波珠螺丝相适应的滑动槽,波珠螺丝卡进滑动槽中,使得敲击后座320与敲击杆相互固定,扁平状设计使得敲击杆与敲击后座不会发生相对转动。在后续髋臼杯安装过程中,使用者可通过敲击杆底座敲击敲击杆,完成髋臼杯安置并同时使得敲击杆与髋臼杯分离。
33.磨削杆300
‑
2上开设的环形槽310
‑
2轴向宽度与限位柱420下端部相适应,限位柱420 下端部卡在操作杆的环形槽310
‑
2中间,此时,在磨削杆300
‑
2一端安装髋臼锉,另一端连接电钻,由医生控制髋臼锉在髋臼窝内进行旋转运动,直至打磨完成,旋转限位。
34.用于关节置换的限位与把持组件中安装的是磨削杆时,装置内部的限位组件通过
限位柱420卡住磨削杆两端的环形槽,可保证髋臼锉绕几何中心轴旋转。拉动底座550,带动滑动块往后移动,限位柱420向上弹出,敲击杆300
‑
1可抽出。锁紧螺柱610位于拉动底座550前方,穿过第二套筒520筒壁,用于固定磨削杆。锁紧螺母可手动旋转拧紧,使磨削杆不转动,保持操磨削杆与整个装置的相对固定,二者不发生任何相对旋转或平移。
35.用于关节置换的限位与把持组件中安装的是敲击杆时,限位柱420顶住环形槽310
‑
1 左侧面,实现物理自锁结构,限制敲击杆的移动距离(轴向滑动)。拉动底座的上方设有限位标识11,当敲击杆向下敲击时,滑动组件相对敲击杆向上移动,当拉动底座到达限位标识处时,说明敲击已到位。进行操作杆更换时,将拉动底座550向后拉动,滑动块随着拉动底座550向后移动,限位柱420弹出,敲击杆即可抽出。
36.综合而言,在更换操作杆时,将拉动底座550向后拉动,滑动块随着拉动底座550向后移动,限位柱420弹出,更换操作杆,松开拉动底座550,由于弹簧弹性,将滑动块向前挤压,此时限位柱420因滑动块挤压向上移动卡住操作杆300的环形槽。
37.以上显示和描述了本实用新型的基本原理、主要特征和优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1