角度调节装置及关节牵引治疗仪的制作方法
1.本实用新型涉及医疗器械技术领域,尤其涉及一种角度调节装置及关节牵引治疗仪。
背景技术:
2.肘关节是身体的重要部分组成,肘关节受损会影响到个人的日常生活、学习、工作及休闲活动等各个方面。为了消除这些影响,患者需要使用治疗器械(例如,关节牵引治疗仪)来进行物理性的康复治疗。目前的关节牵引治疗仪在患者中间休息时,需要摘下关节牵引治疗仪,操作较为繁琐不便。
技术实现要素:
3.鉴于上述问题,提出了本实用新型以解决上述问题或至少部分地解决上述问题的角度调节装置及关节牵引治疗仪。
4.本实用新型实施方式提供一种角度调节装置,用于关节牵引治疗仪,所述关节牵引治疗仪包括小臂固定组件和大臂固定组件,所述角度调节装置包括:
5.角度调节元件;
6.驱动机构,所述驱动机构包括第一驱动组件和第二驱动组件;
7.变位元件,当所述变位元件处于第一位置状态时,所述第一驱动组件与所述第二驱动组件间隔;当所述变位元件处于第二位置状态时,所述第一驱动组件与所述第二驱动组件传动连接,所述角度调节元件用于带动所述第一驱动组件及所述第二驱动组件调节所述小臂固定组件与所述大臂固定组件之间的夹角。
8.在某些实施方式中,所述角度调节装置还包括壳体,所述角度调节元件位于所述壳体外,所述驱动机构至少部分收容于所述壳体内,所述变位元件至少部分位于所述壳体外。
9.在某些实施方式中,所述变位元件形成有变位轴孔,所述壳体设置有变位转轴,所述变位转轴穿过所述变位轴孔,以使所述变位元件与所述壳体可转动地连接;所述变位元件能够相对于所述壳体转动至所述第一位置状态或所述第二位置状态。
10.在某些实施方式中,所述变位元件包括:
11.转轴部,所述转轴部至少部分收容于所述壳体内,所述变位轴孔形成于所述转轴部;
12.把手部,所述把手部自所述转轴部向所述壳体外延伸。
13.在某些实施方式中,所述把手部包括第一把手段和第二把手段,所述第一把手段与所述转轴部连接,所述第二把手段与所述第一把手段连接,所述第二把手段与所述第一把手段之间的夹角为钝角。
14.在某些实施方式中,所述第一驱动组件为蜗杆组件,所述第二驱动组件为蜗轮组件;
15.所述壳体包括蜗杆壳体并形成有蜗轮固定槽,所述蜗杆壳体用于安装所述蜗杆组件,所述蜗轮固定槽用于安装蜗轮组件。
16.在某些实施方式中,所述壳体包括主壳体和主壳体盖,所述主壳体形成有中心轴孔,所述小臂固定组件和所述大臂固定组件中的一个设置有角度转轴,所述角度转轴穿过所述中心轴孔与所述驱动机构传动连接,所述小臂固定组件和所述大臂固定组件中的另一个与所述主壳体盖固定连接。
17.本实用新型实施方式提供一种关节牵引治疗仪,包括:
18.小臂固定组件,所述小臂固定组件用于固定患者小臂;
19.大臂固定组件,所述大臂固定组件用于固定患者大臂;
20.上述任一实施方式所述的角度调节装置,所述角度调节装置用于调节所述小臂固定组件与所述大臂固定组件之间的夹角。
21.在某些实施方式中,所述小臂固定组件包括小臂托和小臂支架,所述小臂托用于固定患者小臂,所述小臂支架用于安装所述小臂托;和/或
22.所述大臂固定组件包括大臂托和大臂支架,所述大臂托用于固定患者大臂,所述大臂支架用于安装所述大臂托。
23.在某些实施方式中,所述小臂托具有小臂可调节绑带,所述小臂托通过所述小臂可调节绑带固定患者小臂;和/或
24.所述大臂托具有大臂可调节绑带,所述大臂托通过所述大臂可调节绑带固定患者大臂。
25.本实用新型实施方式的角度调节装置及关节牵引治疗仪,可实现患者中间休息时,不需要摘下关节牵引治疗仪,只需要将变位元件变位至第一位置状态,使得第一驱动组件与第二驱动组件间隔,动力不会由第一驱动组件传递至第二驱动组件,进而不会调节小臂固定组件与大臂固定组件之间的夹角,如此关节牵引治疗仪不会工作。当需要继续使用关节牵引治疗仪时,可将变位元件变位至第二位置状态,使得第一驱动组件与第二驱动组件传动连接,角度调节元件可带动第一驱动组件及第二驱动组件调节小臂固定组件与大臂固定组件之间的夹角,起到关节牵引治疗的效果。本实用新型实施方式的角度调节装置及关节牵引治疗仪操作较为方便。
附图说明
26.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
27.图1为本实用新型某些实施方式的关节牵引治疗仪的立体结构示意图;
28.图2为本实用新型某些实施方式的关节牵引治疗仪的爆炸结构示意图;
29.图3为本实用新型某些实施方式的关节牵引治疗仪的立体结构示意图;
30.图4为本实用新型某些实施方式的关节牵引治疗仪的使用状态示意图;
31.图5为本实用新型某些实施方式的关节牵引治疗仪的使用状态示意图;
32.图6为本实用新型某些实施方式的角度调节装置的结构示意图;
33.图7为本实用新型某些实施方式的变位元件处于第一位置状态的示意图;
34.图8为本实用新型某些实施方式的变位元件处于第二位置状态的示意图。
35.主要元件及符号说明:
36.关节牵引治疗仪100、臂托10、小臂托12、大臂托14、可调节绑带16、小臂可调节绑带162、大臂可调节绑带164、臂支架30、小臂支架32、大臂支架34、滑行孔36、小臂滑行孔362、大臂滑行孔364、小臂固定组件42、大臂固定组件44、角度转轴46、位置调节元件50、小臂位置调节元件52、大臂位置调节元件54、臂托架70、小臂托架72、大臂托架74、安装孔76、内安装板78、外安装板79、角度调节装置90、壳体92、主壳体922、中心轴孔9222、蜗杆转轴9224、主壳体盖924、蜗杆壳体926、蜗杆轴孔9262、蜗轮固定槽928、变位转轴929、角度调节元件94、驱动机构96、第一驱动组件962、第一小轴承9622、蜗杆9624、第二小轴承9626、第二驱动组件964、蜗轮9642、大轴承9644、变位元件98、变位轴孔982、转轴部984、把手部986、第一把手段9862、第二把手段9864。
具体实施方式
37.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
38.在通篇说明书及权利要求当中所提及的“包括”为一开放式用语,故应解释成“包括但不限定于”。“大致”是指在可接收的误差范围内,本领域技术人员能够在一定误差范围内解决所述技术问题,基本达到所述技术效果。
39.此外,“连接”一词在此包含任何直接及间接的连接手段。因此,若文中描述一第一装置连接于一第二装置,则代表所述第一装置可直接连接于所述第二装置,或通过其它装置间接地连接至所述第二装置。
40.说明书后续描述为实施本实用新型的较佳实施方式,然所述描述乃以说明本实用新型的一般原则为目的,并非用以限定本实用新型的范围。本实用新型的保护范围当视所附权利要求所界定者为准。
41.应当理解,本文中使用的术语“和/或”仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系。
42.在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
43.可以理解,肘关节是身体的重要部分组成,肘关节受损会影响到个人的日常生活、学习、工作及休闲活动等各个方面。为了消除这些影响,患者需要使用治疗器械(例如,关节牵引治疗仪)来进行物理性的康复治疗。目前的关节牵引治疗仪在患者中间休息时,需要摘下关节牵引治疗仪,操作较为繁琐不便。
44.请参阅图1,本实用新型实施方式提供一种关节牵引治疗仪100。关节牵引治疗仪100包括小臂固定组件42、大臂固定组件44和角度调节装置90。小臂固定组件42用于固定患者小臂。大臂固定组件44用于固定患者大臂。角度调节装置90用于调节小臂固定组件42与
大臂固定组件44之间的夹角。
45.请一并参阅图1、图2和图6,本实用新型实施方式的角度调节装置90包括角度调节元件94、驱动机构96和变位元件98。驱动机构96包括第一驱动组件962和第二驱动组件964。当变位元件98处于第一位置状态时,第一驱动组件962与第二驱动组件964间隔;当变位元件98处于第二位置状态时,第一驱动组件962与第二驱动组件964传动连接,角度调节元件94用于带动第一驱动组件962及第二驱动组件964调节小臂固定组件42与大臂固定组件44之间的夹角。
46.本实用新型实施方式的角度调节装置90及关节牵引治疗仪100,可实现患者中间休息时,不需要摘下关节牵引治疗仪100,只需要将变位元件98变位至第一位置状态,使得第一驱动组件962与第二驱动组件964间隔,动力不会由第一驱动组件962传递至第二驱动组件964,进而不会调节小臂固定组件42与大臂固定组件44之间的夹角,如此关节牵引治疗仪100不会工作。
47.当需要继续使用关节牵引治疗仪100时,可将变位元件98变位至第二位置状态,使得第一驱动组件962与第二驱动组件964传动连接,角度调节元件94可带动第一驱动组件962及第二驱动组件964调节小臂固定组件42与大臂固定组件44之间的夹角,起到关节牵引治疗的效果。本实用新型实施方式的角度调节装置90及关节牵引治疗仪100操作较为方便。
48.请一并参阅图1及图2,在本实用新型的某些实施方式中,关节牵引治疗仪100可包括臂托10、臂支架30、位置调节元件50、臂托架70、角度调节装置90。
49.臂托10用于固定患者手臂。具体地,臂托10可包括小臂托12,小臂托12用于固定患者小臂。或者,臂托10包括大臂托14,大臂托14用于固定患者大臂。或者,臂托10同时包括小臂托12和大臂托14,小臂托12用于固定患者小臂,大臂托14用于固定患者大臂。
50.优选地,小臂托12和/或大臂托14的靠近手臂的一侧可为柔性面料制成。例如为内层为海绵等缓冲层,外层包覆布料层,如此能够有效保证关节牵引治疗仪100的重量较轻,便于携带,并且患者在使用时,舒适度也较好。当然,在其他一些实施方式中,小臂托12和/或大臂托14也可以为硬质材料制成,本实用新型不做限定。
51.臂托10具有可调节绑带16,臂托10通过可调节绑带16固定患者手臂。
52.具体地,小臂托12可具有小臂可调节绑带162,小臂托12通过小臂可调节绑带162固定患者小臂。患者小臂可以容纳于小臂可调节绑带162与小臂托12之间。优选地,小臂可调节绑带162为长度可调节绑带。小臂可调节绑带162的长度可调,从而使得小臂可调节绑带162与小臂托12之间的容纳空间可调,进而可以适应不同患者不同粗细的小臂使用,提高了适用性。
53.大臂托14可具有大臂可调节绑带164,大臂托14通过大臂可调节绑带164固定患者大臂。患者大臂可以容纳于大臂可调节绑带164与大臂托14之间。优选地,大臂可调节绑带164为长度可调节绑带。大臂可调节绑带164的长度可调,从而使得大臂可调节绑带164与大臂托14之间的容纳空间可调,进而可以适应不同患者不同粗细的大臂使用,提高了适用性。
54.可选地,臂托10上还可以通过其他的固定装置将患者手臂固定,例如刚性的半环,半环一端与臂托10铰接,半环的另一端与臂托10可拆卸地连接,半环与臂托10的表面围成供患者手臂容纳的空间。
55.臂支架30用于安装臂托10。具体地,当臂托10包括小臂托12时,臂支架30包括小臂
支架32,小臂支架32用于安装小臂托12。其中,小臂托12可直接或间接地安装于小臂支架32。当臂托10包括大臂托14时,臂支架30包括大臂支架34,大臂支架34用于安装大臂托14。其中,大臂托14可直接或间接地安装于大臂支架34。本实用新型实施方式中,小臂托12通过位置调节元件50安装于小臂支架32,大臂托14通过位置调节元件50安装于大臂支架34。
56.小臂支架32与大臂支架34可转动地连接。具体地,小臂支架32与大臂支架34可通过转轴直接地可转动地连接。或者,小臂支架32与大臂支架34可通过固定物及转轴间隔地可转动地连接。例如,小臂支架32与固定物固定连接,固定物再通过转轴与大臂支架34可转动地连接;或者,大臂支架34与固定物固定连接,固定物再通过转轴与小臂支架32可转动地连接;或者,小臂支架32与第一固定物固定连接,大臂支架34与第二固定物固定连接,第一固定物再通过转轴与第二固定物可转动地连接。
57.请继续参阅图1及图2,小臂托12和小臂支架32可组成小臂固定组件42。大臂托14和大臂支架34可组成大臂固定组件44。换句话说,小臂固定组件42包括小臂托12和小臂支架32,大臂固定组件44包括大臂托14和大臂支架34。此时,小臂固定组件42用于固定患者小臂。大臂固定组件44用于固定患者大臂。在其他实施方式中,小臂固定组件42和大臂固定组件44的具体构造也可不限于此。
58.位置调节元件50与臂托10固定连接。需要指出的是,位置调节元件50与臂托10可以是直接固定连接或者间接固定连接,只需要保证两者相对固定、能够共同运动即可。具体地,位置调节元件50和臂托10能够共同相对于臂支架30运动,以调节臂托10相对于臂支架30的位置。如此,当患者手臂承载于臂托10上时,在关节牵引治疗仪100启动前或工作过程中(工作过程中例如是小臂支架32与大臂支架34相对转动的过程中),患者手臂都能够通过臂托10前后移动至臂支架30上的合适位置,患者使用方便,且在使用过程中舒适度较高,治疗效果较好。在一个例子中,患者手臂可带动臂托10沿臂支架30的长度延伸方向前后移动至臂支架30上的合适位置。
59.当臂托10包括小臂托12、臂支架30包括小臂支架32时,位置调节元件50包括小臂位置调节元件52,小臂位置调节元件52与小臂托12固定连接,小臂位置调节元件52和小臂托12能够共同相对于小臂支架32运动,以改变小臂托12相对于小臂支架32的位置。如此,当患者小臂承载于小臂托12上时,在关节牵引治疗仪100启动前或工作过程中,患者小臂都能够通过小臂托12前后移动至小臂支架32上的合适位置。在一个例子中,患者小臂可带动小臂托12沿小臂支架32的长度延伸方向前后移动至小臂支架32上的合适位置。
60.当臂托10包括大臂托14、臂支架30包括大臂支架34时,位置调节元件50包括大臂位置调节元件54,大臂位置调节元件54与大臂托14固定连接,大臂位置调节元件54和大臂托14能够共同相对于大臂支架34运动,以改变大臂托14相对于大臂支架34的位置。如此,当患者大臂承载于大臂托14上时,在关节牵引治疗仪100启动前或工作过程中,患者大臂都能够通过大臂托14前后移动至大臂支架34上的合适位置。在一个例子中,患者大臂可带动大臂托14沿大臂支架34的长度延伸方向前后移动至大臂支架34上的合适位置。
61.请参阅图1及图2,臂支架30包括相背的内侧和外侧。臂托10位于内侧,位置调节元件50位于外侧。臂支架30形成有滑行孔36,滑行孔36可为长条椭圆状的通孔。位置调节元件50与臂托10通过滑行孔36固定连接,并能够共同沿滑行孔36相对于臂支架30运动。在一个例子中,位置调节元件50的一端穿过滑行孔36至内侧与臂托10固定连接,位置调节元件50
的另一端卡于外侧。位置调节元件50的一端的横截面积小于位置调节元件50的另一端的横截面积。位置调节元件50例如可以是调整丝等。
62.当臂托10包括小臂托12、臂支架30包括小臂支架32时,小臂支架32包括相背的内侧和外侧。小臂托12位于内侧,小臂位置调节元件52位于外侧。小臂支架32形成有小臂滑行孔362,小臂滑行孔362可为长条椭圆状的通孔。小臂位置调节元件52与小臂托12通过小臂滑行孔362固定连接,并能够共同沿小臂滑行孔362相对于小臂支架32运动。在一个例子中,小臂位置调节元件52的一端穿过小臂滑行孔362至内侧与小臂托12固定连接,小臂位置调节元件52的另一端卡于外侧。小臂位置调节元件52的一端的横截面积小于小臂位置调节元件52的另一端的横截面积。小臂位置调节元件52例如可以是调整丝等。
63.当臂托10包括大臂托14、臂支架30包括大臂支架34时,大臂支架34包括相背的内侧和外侧。大臂托14位于内侧,大臂位置调节元件54位于外侧。大臂支架34形成有大臂滑行孔364,大臂滑行孔364可为长条椭圆状的通孔。大臂位置调节元件54与大臂托14通过大臂滑行孔364固定连接,并能够共同沿大臂滑行孔364相对于大臂支架34运动。在一个例子中,大臂位置调节元件54的一端穿过大臂滑行孔364至内侧与大臂托14固定连接,大臂位置调节元件54的另一端卡于外侧。大臂位置调节元件54的一端的横截面积小于大臂位置调节元件54的另一端的横截面积。大臂位置调节元件54例如可以是调整丝等。
64.请参阅图1及图2,臂托架70安装于臂支架30。臂托架70形成有安装孔76,位置调节元件50与臂托10通过安装孔76及滑行孔36固定连接。臂托架70包括内安装板78和外安装板79,内安装板78与外安装板79连接。当臂托架70安装于臂支架30时,内安装板78位于内侧,外安装板79位于外侧,安装孔76贯穿内安装板78及外安装板79,位置调节元件50与臂托10依次通过外安装板79上的安装孔76、滑行孔36、及内安装板78上的安装孔76固定连接。本实用新型实施方式通过设置具有内安装板78及外安装板79的臂托架70,有利于增加位置调节元件50与臂托10之间的固定面积,保证固定的可靠性,以及位置调节元件50与臂托10共同沿滑行孔36相对于臂支架30运动时的平稳性。此外,臂托架70还可以包括自内安装板78延伸的延长部,延长部用于托住臂托10或与臂托10连接固定。
65.进一步地,当臂托10包括小臂托12、臂支架30包括小臂支架32时,臂托架70可包括小臂托架72;当臂托10包括大臂托14、臂支架30包括大臂支架34时,臂托架70可包括大臂托架74。上述对臂托架70的解释说明同样适用于小臂托架72和大臂托架74,或可依此类推,在此不再详细展开。
66.当然,在其他实施方式中,关节牵引治疗仪100也可以不设置臂托架70,在此不作限制。
67.请参阅图1及图2,角度调节装置90设置于小臂固定组件42与大臂固定组件44之间。角度调节装置90用于调节小臂固定组件42与大臂固定组件44之间的夹角。具体地,角度调节装置90设置于小臂支架32与大臂支架34之间。角度调节装置90用于调节小臂支架32与大臂支架34之间的夹角。进一步地,角度调节装置90还能够将小臂支架32与大臂支架34锁定在当前夹角状态。
68.优选地,角度调节装置90可设于小臂固定组件42与大臂固定组件44的侧边,以不占用小臂固定组件42与大臂固定组件44承托患者小臂和大臂的位置,且便于患者边使用边调节,便于操作,使用灵活性较好。
69.当角度调节装置90驱动小臂固定组件42与大臂固定组件44相对靠近时,两者之间的夹角减小(如图3所示,小臂固定组件42与大臂固定组件44之间的夹角较小),当角度调节装置90驱动小臂固定组件42与大臂固定组件44相互远离时,两者之间的夹角增大(如图1、图4及图5所示,小臂固定组件42与大臂固定组件44之间的夹角较大),进而调节大臂固定组件44与小臂固定组件42之间的夹角,即调节患者小臂与大臂之间的夹角,起到关节牵引治疗的效果。
70.可以理解的是,大臂固定组件44与小臂固定组件42之间的夹角不同,对患者的关节的牵拉力的大小也不同。在使用时,患者小臂被小臂固定组件42牵引,小臂被大臂固定组件44牵引,大臂固定组件44与小臂固定组件42之间的夹角越小,患者小臂越靠近大臂,关节牵引治疗仪100对患者的关节的牵拉力越大。
71.请参阅图1及图2,角度调节装置90包括壳体92、角度调节元件94、驱动机构96和变位元件98。角度调节元件94位于壳体92外,驱动机构96至少部分收容于壳体92内,角度调节元件94用于带动驱动机构96调节小臂支架32与大臂支架34之间的夹角(或者说,角度调节元件94用于带动驱动机构96调节大臂固定组件44与小臂固定组件42之间的夹角)。本实用新型实施方式中,角度调节元件94与驱动机构96配合,调节小臂支架32与大臂支架34之间的夹角,进而调节患者小臂与大臂之间的夹角,起到关节牵引治疗的效果。在一个例子中,角度调节元件94为调节旋钮。角度调节元件94的外表面设有防滑结构。例如,角度调节元件94外表面设有螺纹结构,以达到防滑效果,便于用户操作。
72.壳体92包括可主壳体922和主壳体盖924。主壳体922和主壳体盖924扣合在一起,形成用于容纳驱动机构96的容纳腔。主壳体922和主壳体盖924可拆卸地连接,以便于用户检查容纳腔中的元件是否发生故障,保证驱动机构96的正常运转。需要说明的是,本实用新型实施方式中所描述的主壳体922和主壳体盖924并不限定于为盒状,也可以包括板状,例如主壳体922为盒状,主壳体盖924为板状。
73.主壳体922形成有中心轴孔9222。小臂固定组件42和大臂固定组件44中的一个设置有角度转轴46,角度转轴46穿过中心轴孔9222与驱动机构96传动连接,小臂固定组件42和大臂固定组件44中的另一个与主壳体盖924固定连接。具体地,小臂支架32和大臂支架34中的一个设置有角度转轴46,角度转轴46穿过中心轴孔9222与驱动机构96传动连接,小臂支架32和大臂支架34中的另一个与主壳体盖924固定连接。
74.如图2所示的例子中,小臂支架32设置有角度转轴46,角度转轴46穿过中心轴孔9222与驱动机构96传动连接,大臂支架34与主壳体盖924固定连接。
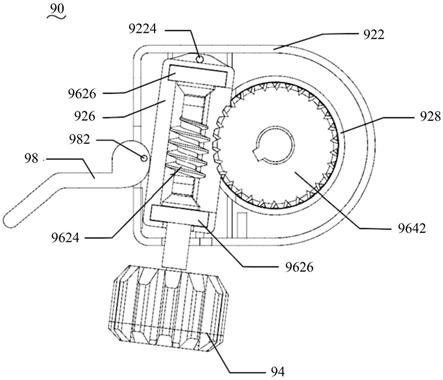
75.请一并参阅图2和图6,驱动机构96可包括第一驱动组件962和第二驱动组件964。第一驱动组件962具体可为蜗杆组件,第二驱动组件964具体可为蜗轮组件。此时,壳体92可包括蜗杆壳体926并形成有蜗轮固定槽928,蜗杆壳体926用于安装蜗杆组件,蜗轮固定槽928用于安装蜗轮组件。蜗杆组件至少部分安装于蜗杆壳体926内,蜗轮组件至少部分安装于蜗轮固定槽928内。
76.蜗杆壳体926的远离角度调节元件94的端部可形成有蜗杆轴孔9262,主壳体922设置有蜗杆转轴9224,蜗杆转轴9224穿设于蜗杆轴孔9262,从而实现蜗杆壳体926安装于主壳体922。
77.第一驱动组件962(蜗杆组件)可包括第一小轴承9622、蜗杆9624和第二小轴承
9626等。第一小轴承9622设置于蜗杆9624的一端,第二小轴承9626设置于蜗杆9624的另一端。蜗杆9624通过第一小轴承9622和第二小轴承9626安装于蜗杆壳体926。第二驱动组件964(蜗轮组件)可包括蜗轮9642和大轴承9644等。蜗轮9642通过大轴承9644安装于蜗轮固定槽928。角度调节元件94与蜗杆9624连接,蜗杆9624与蜗轮9642传动连接。
78.当角度调节装置90调节小臂支架32与大臂支架34之间的夹角时,角度调节元件94带动蜗杆9624,蜗杆9624带动蜗轮9642,蜗轮9642带动角度转轴46,角度转轴46带动小臂支架32,从而使得小臂支架32相对于大臂支架34旋转,实现小臂支架32与大臂支架34之间的角度调节。
79.请继续参阅图2和图6,变位元件98至少部分位于壳体92外,从而便于用户操控变位元件98。变位元件98可变位至第一位置状态(如图7所示,其中s1为参照位置,d1<d2)或第二位置状态(如图8所示,其中s1为参照位置)。当变位元件98处于第一位置状态时,第一驱动组件962与第二驱动组件964间隔。当变位元件98处于第二位置状态时,第一驱动组件962与第二驱动组件964传动连接,角度调节元件94用于带动第一驱动组件962及第二驱动组件964调节小臂固定组件42与大臂固定组件44之间的夹角。
80.如此,可实现患者中间休息时,不需要摘下关节牵引治疗仪100,只需要将变位元件98变位至第一位置状态,使得第一驱动组件962与第二驱动组件964间隔,动力不会由第一驱动组件962传递至第二驱动组件964,进而不会调节小臂固定组件42与大臂固定组件44之间的夹角,如此关节牵引治疗仪100不会工作。可以理解,当第一驱动组件962与第二驱动组件964间隔时,蜗杆9624与蜗轮9642脱离,形成齿轮空转,动力不会由蜗杆9624传递至蜗轮9642。
81.当需要继续使用关节牵引治疗仪100时,可将变位元件98变位至第二位置状态,使得第一驱动组件962与第二驱动组件964传动连接,角度调节元件94可带动第一驱动组件962及第二驱动组件964调节小臂固定组件42与大臂固定组件44之间的夹角,起到关节牵引治疗的效果。
82.变位元件98形成有变位轴孔982,壳体92设置有变位转轴929,变位转轴929穿过变位轴孔982,以使变位元件98与壳体92可转动地连接;变位元件98能够相对于壳体92转动至第一位置状态或第二位置状态。当变位元件98绕变位转轴929转动至第一位置状态时,变位元件98对第一驱动组件962或蜗杆壳体926的挤压力度较小,使得第一驱动组件962与第二驱动组件964间隔;当变位元件98绕变位转轴929转动至第二位置状态时,变位元件98对第一驱动组件962或蜗杆壳体926的挤压力度较大,使得第一驱动组件962与第二驱动组件964可传动地连接。在一个例子中,变位元件98为偏心把手。
83.请一并参阅图6至图8,变位元件98包括转轴部984和把手部986。转轴部984至少部分收容于壳体92内,变位轴孔982形成于转轴部984。把手部986自转轴部984向壳体92外延伸。其中,壳体92可开设有供转轴部984部分露出的开口,以便实现转轴部984绕变位转轴929旋转,此外,把手部986自转轴部984向壳体92外延伸,有利于用户通过把手部986调节变位元件98的位置状态,操作较为方便。
84.进一步地,把手部986可包括第一把手段9862和第二把手段9864。第一把手段9862与转轴部984连接,第二把手段9864与第一把手段9862连接。第二把手段9864与第一把手段9862之间的夹角为钝角。如此,用户通过把手部986调节变位元件98的位置状态时较为省
力。
85.需要指出的是,变位元件98也可以具有其他的结构,以在处于第一位置状态时,使得第一驱动组件962与第二驱动组件964间隔,在处于第二位置状态时,使得第一驱动组件962与第二驱动组件964传动连接,本实用新型不作限制。
86.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1