传感器载体的制作方法
传感器载体
1.本发明涉及一种用于插入具有小内径的血管或管腔中的辅助器械。
2.在微创手术的框架内,如今复杂的手术是在人体内进行的。这里,诸如内窥镜的外科器械通过身体开口引导到人体中到达其在人体内的目标位置。为了帮助外科医生在人体内导航外科器械,可以使用光学、超声或电磁位置检测系统。
3.例如,电磁位置检测系统是已知的,其中场发生器生成交变电磁场。由一个或多个线圈形成的定位元件然后布置在外科器械处。此外,还包括线圈的参考传感器通常被提供并布置在相对于患者的固定位置。发生器的交变电磁场在线圈中感生电流,这取决于相应的线圈相对于交变电磁场的取向。如果配备有这样的定位元件的外科器械在生成的交变电磁场中移动,则可以基于感生电流确定定位元件相对于固定参考传感器的位置和取向。
4.如尤其在de 10 2011 119 073 a1中所述,定位元件的位置和取向然后可以例如在外科手术期间用电磁位置检测系统连续确定。带有在位置检测系统中注册的定位元件的外科器械的当前位置然后可以在监视器上在相应身体部位的术前获得的断层摄影截面图像中向外科医生显示。
5.本发明的目的是开发一种具有定位元件的辅助器械,所述定位元件的位置和取向可以用电磁位置检测系统确定,以及一种具有这样的辅助器械的外科器械。
6.关于辅助器械,该目的通过用于插入血管中或用于插入具有小内径的管腔中的辅助器械来实现。辅助器械具有近端和远端并且包括至少一个定位元件,所述定位元件的位置和取向能够用电磁位置检测系统确定。至少一个定位元件直接邻近辅助器械的远端或至少靠近辅助器械的远端布置。至少一个定位元件配置用于捕获交变电磁场。辅助器械的远端区域从辅助器械的远端延伸到定位元件的近端并且定位元件布置在该远端区域内。在其中布置有至少一个定位元件的远端区域的那部分中,辅助器械至少分段地具有小于10nmm2的小弯曲刚度。至少两个线从至少一个定位元件引导到辅助器械的近端并且至少导电地连接到定位元件。至少一个定位元件的长度大小是至少一个定位元件的外径大小的至少十倍。
7.本发明包括认识到这样的辅助器械通常适合于多种用途。例如,这样的辅助器械可以插入另一器械(例如外科器械或导管)的管腔中,以便获得可以借助于电磁位置检测系统检测其位置的外科器械或导管。上述器械也可以在外科手术中作为独立器械使用。因此,具有小内径的血管或管腔可以是人体的血管或管腔或外科器械的管腔。外科器械的相应管腔可以例如以使得根据本发明的辅助器械可以插入管腔中的方式配置。
8.辅助器械的特别优选的应用包括将辅助器械插入初始为导丝提供的通常已知器械的管腔中。常规地,对于这样的器械,导丝首先被引导到其目标位置,然后器械在导丝上前进并沿着导丝引导到其目标位置。导丝在器械的提供的管腔中前进,同时器械沿着导丝滑动。
9.如果现在代替导丝,将本文所述类型的辅助器械插入器械或导管的管腔中,然后将器械或导管与辅助器械一起使用,则可以使用位置检测系统确定器械本身的位置并且不再需要导丝。
10.可以与本文所述的辅助器械一起使用的器械和植入物是例如jamshidi针、丝锥、螺丝刀和椎弓根螺钉,其可以用螺丝刀插入,并且与螺丝刀一样,具有用于导丝的连续中心管腔。
11.借助于本文所述的辅助器械,球囊导管或用于扩张身体血管的其他导管也可以变成导管,其位置可以在例如手术期间借助于位置检测系统确定,以便精确确定扩张的位置。
12.由于根据本发明的辅助器械具有配置用于捕获交变电磁场的至少一个定位元件,辅助器械或具有辅助器械的外科器械可以连接到电磁位置检测系统。至少一个定位元件的位置和取向然后可以用相应的电磁位置检测系统连续确定并用于在外科手术期间帮助外科医生。例如,至少一个定位元件的检测位置和取向可以用于在患者身体部位的断层摄影获得的截面图像中显示辅助器械或具有辅助器械的外科器械的位置。例如,辅助器械可以可移除地布置在jamshidi针中,使得当穿透身体部位(例如脊柱的椎体)时,可以用位置检测系统确定jamshidi针本身的位置和取向。然后外科医生可以在监视器上在断层摄影获得的椎体截面图像中虚拟地跟随jamshidi针穿透到椎体中。当jamshidi针放置完成后,可以移除辅助器械,并且jamshidi针的管腔可以用于插入另一器械。
13.本发明包括进一步认识到在外科器械的常规定位元件中,通常优选定位元件的长度大小基本上等于或至少基本上不大于定位元件的外径大小。通常,因此期望提供具有尽可能小的长度的定位元件。由于具有小长度的普通定位元件的外径必须相对较大以便提供足以确定定位元件的位置和取向的信噪比,因此这样的定位元件尤其不适合插入具有小内径的血管或管腔中。因此,相应地具有小内径的管腔的已经很细的外科器械不能连接到具有常规定位元件的位置检测系统。
14.有利的是,根据本发明的辅助器械至少分段地是如此挠性,使得它可以适应血管或管腔的给定形状,或者它可以跟随具有小内径的血管或管腔的路线。根据本发明,这通过辅助器械,特别是在其中布置有至少一个定位元件的远端区域的那部分中至少分段地具有小于10nmm2的小弯曲刚度而实现。弯曲刚度由弹性模量和几何惯性矩的乘积得出。定位元件的相对较小的弯曲刚度尤其是由相对较小的几何惯性矩引起。定位元件的相对较小的几何惯性矩是由于定位元件的外径可以选择得相对较小的事实而引起,原因是由于定位元件的长度在数量级上是其外径的至少十倍,即使外径很小,也可以生成具有足以确定位置和取向的信噪比的电压信号。
15.辅助器械因此具有至少一个外径相对较小的定位元件并且因此适合插入具有小内径的血管或管腔中。另外,辅助器械,特别是在远端区域中至少分段地是挠性的并且因此可以适应血管或管腔的预定形状或路线,尽管至少一个定位元件具有优选大于10mm的相对较大的长度。同时,辅助器械可以连接到位置检测系统,以便确定至少一个定位元件的位置和取向,特别是在插入血管或管腔期间。
16.关于外科器械,上述目的通过具有可从外部接近的管腔的外科器械实现,辅助器械可移除地布置在所述管腔中,辅助器械至少具有如上所述的根据本发明的辅助器械的特征。
17.外科器械的管腔可以例如为管状或套管的形式并且可以具有相对较小的内径,其刚好以这样的方式确定尺寸:使得具有小于例如0.5mm的外径的辅助器械可以准确地插入管腔中,优选地适合固定地布置在管腔中。
18.如果需要,辅助器械可以作为模块插入外科器械的管腔中和从其移除。例如,辅助器械可以在手术之前插入外科器械的管腔中以将外科器械连接到位置检测系统。
19.在将第一外科器械定位在目标部位之后或在外科手术之后,可以将辅助器械从第一外科器械的管腔移除,然后根据需要插入另一外科器械的管腔中以将该另一外科器械连接到位置检测系统。
20.有利地,辅助器械可以用于连接以各种方式配置的外科器械,只要它们具有可从外部接近的管腔,辅助器械可以插入所述管腔中然后布置在内部。
21.优选地,外科器械至少部分地由钛或铬镍钢制成。优选地,外科器械由顺磁材料,例如顺磁钢或钛制成,使得其可以在电磁位置检测系统中使用而不影响生成的电磁场。
22.具有辅助器械的外科器械可以是例如导管,辅助器械布置在所述导管的管腔中。然后可以使用辅助器械将导管,例如心脏导管、抽吸导管或透析导管连接到位置检测系统。具有辅助器械的导管可以在外科手术中使用并且可以例如被引入患者的膀胱、胃、肠、血管中,也可以引入患者的耳朵或心脏中。在插入期间,可以确定具有辅助器械的导管的位置,并且外科医生可以获得位置信息。例如,导管的位置可以显示在断层摄影获得的截面图像中以帮助外科医生在患者体内进行导管导航。
23.具有辅助器械的导管也可以是配备有球囊的球囊导管,所述球囊可以例如用压缩空气或液体膨胀。具有辅助器械的球囊导管可以连接到位置检测系统,所述位置检测系统可以用于在外科手术期间确定球囊导管的位置。然后可以将球囊导管精确地引导到人体中的目标位置以便在那里膨胀。具有辅助器械的这样的球囊导管可以用于例如扩张狭窄或阻塞的血管,即在血管成形术中,或在泌尿科中从膀胱排出尿液,或在骨科中使用球囊后凸成形术治疗椎骨骨折,或在呼吸科中扩张或暂时封闭支气管,例如用于手术,或在妇科中减少植入性胎盘出血。
24.辅助器械也可以布置在jamshidi针的管腔内并且与jamshidi针一起使用。例如,使用具有辅助器械的jamshidi针可以进行骨髓穿刺,其中可以在将jamshidi针引导至骨,例如,引导至脊柱的椎体的同时,用位置检测系统确定jamshidi针的位置。jamshidi针的位置可以例如显示在断层摄影获得的截面图像中,使得外科医生可以虚拟地观察jamshidi针穿透到骨中并相应地引导jamshidi针。
25.辅助器械也可以布置在切割工具的管腔,特别是螺纹工具(例如螺纹切割器或丝锥)的管腔中。例如,可以用丝锥钻出骨螺钉的外螺纹。如果具有辅助器械的丝锥连接到位置检测系统,则丝锥的位置可以显示在断层摄影获得的截面图像中以帮助外科医生将丝锥精确定位在骨上方并评估钻孔的进度。
26.类似于外科螺丝刀,椎弓根螺钉是空心的,以便辅助器械可以以使得辅助器械的远端延伸到椎弓根螺钉的尖端中的方式布置在螺丝刀和椎弓根螺钉中。然后可以将布置有辅助器械的椎弓根螺钉和螺丝刀连接到位置检测系统。特别地,椎弓根螺钉的位置然后可以显示在断层摄影获得的截面图像中,使得外科医生可以在放置椎弓根螺钉的同时在断层摄影获得的截面图像上定位自己。特别地,外科医生可以基于椎弓根螺钉在断层摄影截面图像中的位置来精确地确定将椎弓根螺钉拧入骨中的位置,并且可以控制进入骨(例如,进入脊柱的椎体)的穿透深度。在放置椎弓根螺钉之后,辅助器械可以从螺丝刀和椎弓根螺钉的管腔移除并且可以用于连接另外的外科器械。椎弓根螺钉或具有其中布置有辅助器械的
管腔的其他螺钉可以例如在脊柱融合的情况下使用,即用于拧紧或加固脊柱的椎体。
27.可以配备有辅助器械的其他外科器械是通常不具有管腔但已经改装有管腔或自始制造有用于这种辅助器械的管腔的那些外科器械。这种外科器械可以是手术刀、手术锯,例如骨锯、骨锉、烧灼器或镊子。具有辅助器械的外科器械然后可以连接到位置检测系统并与其一起使用。
28.由于辅助器械具有外径相对较小的定位元件,因此外科器械的管腔可以具有相对较小的内径。有利地,具有小内径的管腔的外科器械本身可以相对较细并且仍然可以借助于根据本发明配置的辅助器械连接到位置检测系统。有利的是,已经挠性设计的外科器械在布置有辅助器械的情况下也保持挠性。有利地,外科器械也可以具有小内径的若干管腔,例如不同设计的辅助器械可以插入所述管腔中。
29.在下面,描述根据本发明的辅助器械的优选实施例。
30.优选地,定位元件具有0.5mm或更小,特别地,小于0.3mm的外径。外径为0.5mm的定位元件;优选地,具有5mm或更大的长度。因此,外径为0.3mm的定位元件的长度为至少3mm。优选的是外径为0.5mm或更小的定位元件的长度为至少10mm。即使辅助器械的至少一个定位元件具有至少10mm的长度,在其中布置有至少一个定位元件的远端区域的那部分中的辅助器械至少分段地具有小于10nmm2的低弯曲刚度。
31.辅助器械也可以具有至少两个定位元件,每个定位元件与至少两个电线导电地连接。优选地,至少两个定位元件彼此电独立并且可以用于不同的功能。优选地,至少两个定位元件都位于远端区域内,然后所述远端区域从更靠近辅助器械的近端定位的定位元件的近端延伸到辅助器械的远端。在其中布置有至少两个定位元件的远端区域的那部分中,辅助器械至少分段地具有小于10nmm2的低弯曲刚度。每个定位元件可以由单个线圈或由若干电连接线圈形成的线圈装置形成。
32.定位元件可以空间地布置在辅助器械中,使得至少一个定位元件的远端形成辅助器械的远端。在该情况下,远端区域的长度对应于定位元件的长度。然而,如果定位元件靠近辅助器械的远端布置并且定位元件与辅助器械的远端相距一定距离布置,则远端区域的长度是定位元件的长度加上到辅助器械的远端的距离。
33.优选地,连接到定位元件的至少两个电线彼此电绝缘并且与定位元件电绝缘。
34.长度是定位元件的外径的至少十倍的至少一个定位元件优选地具有在2mh至4mh之间的总电感。如果至少一个定位元件由单个线圈或线圈装置形成,则优选地,线圈或线圈装置分别具有在2mh至4mh之间的总电感。
35.通常由位置检测系统的场发生器生成的交变电磁场根据电磁感应原理在形成定位元件的线圈或线圈装置中感生电流,其中感生电流取决于定位元件在交变电磁场中的取向。然后可以经由电连接到定位元件的线抽头表示在定位元件中感生的电压的电压信号。由于定位元件优选地以使得定位元件的总电感在2mh至4mh之间的方式配置,因此可以在定位元件中感生足够高的电压,使得抽头电压信号有利地具有信噪比使得定位元件在交变电磁场中的位置和取向可以由位置检测系统从抽头电压信号比较可靠地确定。
36.优选地,长度为定位元件的外径的至少十倍的至少一个定位元件以使得其具有在70ω至100ω之间的电阻的方式配置。如果定位元件由单个线圈或由形成线圈装置的多个线圈形成,则它们具有在70ω至100ω之间的电阻。
37.长度是其外径十倍的定位元件可以由具有两个线圈端的单个线圈形成。在相应线圈端的每一个处,线圈可以导电地连接到电线中的相应一个。经由电线抽头的电压信号则表示施加在两个线圈端之间的电压。线圈优选地具有小于0.5mm,特别是小于0.3mm但大于0.05mm的外径。在ep 0691663 a1中尤其描述了具有该大小的外径的线圈。如果线圈的长度1与线圈的横截面的直径a相比较大,则电感l结果大约为
[0038][0039]
其中μ0是磁场常数,μ
r
是相对磁导率,n是绕组数,a是线圈的横截面积。为了产生电感在2mh至4mh之间的线圈,应当相应地选择绕组数、线圈横截面和线圈的长度。在线圈不围绕线圈芯卷绕的情况下,相对磁导率为1。因此线圈的电感可以增加,因为线圈围绕由具有高磁导率的材料制成的线圈芯卷绕。作为进一步的边界条件,可以考虑线圈线的可用厚度。线圈的长度由绕组数和所用线圈线的线厚度的乘积得出。通常,电感在2mh至4mh之间的线圈的长度大于10mm。特别地,由于线圈的优选小外径和所用线圈线的优选小厚度,通常,这样的线圈具有远低于10nmm2的弯曲刚度。弯曲刚度是所用材料的弹性模量和几何惯性矩的乘积。弹性模量是材料常数。因此例如线圈的弯曲刚度可以受到影响,特别是通过改变几何惯性矩,即通过改变横截面几何形状。
[0040]
在辅助器械中还可以布置至少两个定位元件,每个定位元件由单个线圈形成。优选地,每个线圈导电地连接到至少两个线并且电独立于至少一个其他线圈。优选地,线从相应的线圈引导到辅助器械的近端。然后可以从每个线圈抽头独立的电压信号。由于线圈提供独立的电压信号,线圈可以用于不同的功能。
[0041]
在辅助器械中,至少两个定位元件也可以布置在远端区域中,每个定位元件由线圈装置形成。辅助器械还可能包括由单个线圈形成的第一定位元件和由线圈装置形成的另外的定位元件。
[0042]
至少一个线圈可以围绕线圈芯卷绕。如前所述,线圈的电感可以由线圈芯增加。用于线圈芯的合适材料是例如磁导率可高达10,000的软铁。线圈芯可以由单个部件形成,然后所述单个部件优选地从线圈的至少一个远端延伸到该线圈的近端。线圈芯还可以由相对于彼此可移动的多个排列部件形成,然后排列部件优选地从线圈的至少一个远端延伸到该线圈的近端。如果线圈芯由可移动地排列的若干部件形成,则可能有利的是该若干部件精确地彼此配合,例如类似于球形接头。由若干部件形成的线圈芯然后可以相对挠性地适应血管或管腔的给定形状。即使线圈芯由单个部件制成,由于其外径小,线圈芯的弯曲刚度也可以远低于10nmm2。通常,线圈芯可以由不同的材料制成。然而,优选地,所使用的材料具有高磁导率。
[0043]
如果线圈围绕线圈芯卷绕,则线圈的第一线圈端可以导电地连接到至少两个线中的第一线并且线圈的第二线圈端可以导电地连接到线圈芯的远端。线圈芯的近端然后可以电连接到至少两个线中的第二线。然后线圈芯在第二线圈端和第二线之间建立导电连接。
[0044]
在线圈围绕线圈芯卷绕并且线圈的第一线圈端导电地连接到至少两个线中的第一线并且线圈的第二线圈端导电地连接到线圈芯的远端的实施例中,可能有利的是线圈芯在其近端处不与至少两个电线中的第二电线导电地连接,而是从线圈的远端延伸到辅助器械的近端。在该变型中,线圈芯可以形成辅助器械的至少两个线中的一个。
[0045]
也可能有利的是线圈芯朝着辅助器械的近端延伸超过线圈的远端,但不延伸到辅助器械的近端。在其近端处,线圈芯然后优选导电地连接到至少两个线中的第二线。然而,在该实施例中,至少两个线中的第二线不从线圈端延伸到辅助器械的近端,而是从线圈芯的近端延伸到辅助器械的近端。
[0046]
如果至少一个定位元件由单个线圈或线圈装置形成,则至少一个线圈也可以具有至少一个弯曲部段,在所述弯曲部段内线圈相对于该线圈的其余部分是相对挠性的。例如,线圈的弯曲部段可以以这样的方式配置:使得在该部段中,线圈的每单位长度的绕组数小于线圈的其余部分。这样的线圈也可以围绕线圈芯卷绕,并且特别是在线圈的弯曲部段中具有小于10nmm2的弯曲刚度。
[0047]
至少一个定位元件也可以通过由若干电互连线圈形成的线圈装置形成。线圈装置优选地由串联连接的多个线圈形成。优选地,线圈装置具有位于线圈装置的两个线圈之间的至少一个弯曲部段。位于两个线圈之间的线圈装置的弯曲部段具有相对较低的弯曲强度,特别是与线圈装置的线圈相比。特别地,在线圈装置的弯曲部段所在的辅助器械的那部分中,辅助器械具有小于10nmm2的弯曲刚度。在两个弯曲部段之间或通常在弯曲部段之外,辅助器械具有大于10nmm2的弯曲刚度是可能的。
[0048]
布置在线圈装置的近端处的第一线圈优选地在其线圈近端处连接到所述至少两个线中的第一线。布置在该线圈装置的远端处的另一线圈优选地在其线圈远端处导电地连接到至少两个线中的第二线。经由至少两个电线,然后可以在线圈装置处抽头电压信号,所述电压信号表示在线圈装置中感生的施加在线圈装置的远端和线圈装置的近端之间的电压。
[0049]
如果线圈装置由多个串联连接的线圈形成,则定位元件的总电感由线圈装置的各个线圈的相应电感相加地产生。线圈装置的各个线圈然后可以例如以使得它们均具有小于2mh的电感的方式配置。然后线圈装置的弯曲基本上在弯曲部段内发生,使得线圈装置的线圈本身在施加的外力下弯曲得相对较小。因此单独的线圈本身上的机械应力可相对较低。这尤其适用于与由单个线圈形成的定位元件相比时,所述单个线圈具有与线圈装置的长度相当的长度以及在小于0.5mm的外径处在2mh至4mh之间的电感。
[0050]
线圈装置的线圈以及特别是线圈装置的每个线圈可以分别围绕线圈芯卷绕,然后线圈芯优选地从相应线圈的近端延伸到该线圈的远端。优选地,在线圈装置的两个线圈之间的弯曲部段中不设置线圈芯。线圈芯允许在不增加弯曲部段中的弯曲刚度的情况下单个线圈的电感增加,使得弯曲刚度可以远低于10nmm2。线圈装置的所有线圈也可以围绕共同的线圈芯卷绕。各个线圈之间的导线连接然后仍然可以形成线圈装置的弯曲部段,线圈装置在施加的外力下优先在所述弯曲部段中弯曲。
[0051]
线圈装置也可以导电地连接到至少第三线。优选地,然后布置在线圈装置的近端处的第一线圈在其线圈近端处导电地连接到至少两个线中的第一线,并且布置在线圈装置的远端处的另一线圈在其线圈远端处导电地连接到至少两个线中的第二线。至少第三线然后优选地在线圈装置的远端和近端之间的部段中导电地连接到线圈装置。优选地,至少第三线在弯曲部段中导电地连接到线圈装置。然后可以在至少第三线与第一线之间和/或在至少第三线与第二线之间抽头电压信号。
[0052]
如果线圈装置导电地连接到至少第三线,则可以抽头若干电压信号。
[0053]
例如,如果线圈装置包括两个线圈并且第三线在两个线圈之间的弯曲部段中导电地连接到线圈装置,则表示在位于第一线和至少第三线之间的线圈的线圈端之间施加的感生电压的电压信号可以经由第一线和至少第三线抽头。相应地,经由至少第三线和第二线,可以抽头表示施加在位于至少第三线和第二线之间的线圈的线圈端之间的感生电压的电压信号。此外,经由第一线和第二线可以抽头电压信号,所述电压信号表示施加在线圈装置的近端和线圈装置的远端之间的电压并且因此可以分配给线圈装置本身。
[0054]
然后可以独立地评估抽头电压信号,并且可以组合提取的信息以增加确定交变电磁场中定位元件的位置和取向的可靠性。也有可能某些信息只能通过在评估过程中比较抽头电压信号来提取。例如,通过比较电压信号,噪声和实际电压信号可以彼此更可靠地区分。
[0055]
特别地,如果辅助器械旨在插入外科器械的管腔中以便布置在其中,则辅助器械仅包括至少一个定位元件和电连接到至少一个定位元件的电线就足够了。然而,可能有利的是辅助器械具有额外的机械稳定性。至少一个定位元件和至少两个线可以例如由管包封。然后管优选地具有小于0.6mm但尤其大于被包封的定位元件的外径的外径。辅助器械可以通过管提供额外的机械稳定性,同时可以保护定位元件和线免受外部影响。
[0056]
管的管壁优选地具有0.1mm或更小的厚度。优选地,管由导致小于10nmm2的弯曲刚度的材料制成。特别地,在定位元件位于其中的辅助器械的远端区域的那部分中,弯曲刚度也可以基本上由辅助器械的管的弯曲刚度提供。因此,管规定的外径小于0.6mm的辅助器械至少分段地仍然是比较挠性的,而且很细,因此适合插入内径较小且具有弯曲路线或可能难以接近的血管或管腔中。
[0057]
优选地,辅助器械的管由生物相容性材料制成并且/或者管的外表面涂覆有生物相容性材料。具有这种管的辅助器械特别适用于人体内部的外科手术。可以制成辅助器械的管的合适的生物相容性材料是例如聚氨酯(pur)、聚乙烯、硅橡胶或聚醚醚酮(peek)。具有由这些材料之一制成的管的辅助器械可以有利地重复消毒,是生物相容的和射线可透的。因此还可以将例如由金制成的x射线标记布置在辅助器械的管中,所述标记在例如术中获得的x射线图像中可见,并且可以用于确定外科手术期间辅助器械的位置和取向。因此,电磁位置检测可以与荧光镜位置检测组合。还可能有利的是将带有其中放置有x射线标记的管的辅助器械布置在外科器械的管腔中,使得外科器械可以连接到电磁位置检测系统并用荧光镜位置检测系统检测。
[0058]
在辅助器械的近端处可以布置用于电接触的连接部,所述连接部优选导电地连接到至少两个引线。连接部可以具有插头和/或联接件。在连接部处,辅助器械可以经由电缆连接到数据处理设备,例如传统计算机,以将抽头电压信号传输到数据处理设备。数据处理设备优选地是位置检测系统的一部分。数据处理设备优选地配置成评估接收到的电压信号并且通过计算确定定位元件的位置和取向。
[0059]
辅助器械的近端和远端之间的距离优选地在10cm至200cm之间,特别地,在20cm至150cm之间,优选地,在30cm至100cm之间。辅助器械通常可以制造成不同的长度。根据应用,较短或较长的辅助器械可能是有利的。可能的是辅助器械的长度设计成使得定位元件在辅助器械的长度的相对较大的部分上延伸。例如,如果辅助器械的长度为30cm,则定位元件可以在例如3cm的长度上延伸,因此在辅助器械的长度的十分之一上延伸。
[0060]
除了位于远端区域中的至少一个定位元件之外,辅助器械还可以具有近侧定位元件。该近侧定位元件优选地从远端区域开始在辅助器械的近端的方向上与远端区域相距一定距离布置。近侧定位元件可以紧邻远端区域定位。然而,优选地,近侧定位元件和远端区域之间的距离是几厘米,例如在5cm至15cm之间。近侧定位元件配置成捕获交变电磁场。与布置在远端区域中的至少一个定位元件类似,近侧定位元件也可以由线圈或线圈装置形成。特别地,近侧定位元件可以以与布置在辅助器械的远端区域中的定位元件相同的方式配置。
[0061]
通过确定六个自由度(三个平移自由度和三个旋转自由度),可以完全确定定位元件的位置和取向。特别地,如果定位元件由单个线圈形成,则利用该线圈只能确定五个自由度。无法确定定位元件的第六自由度,即围绕线圈的纵向轴线的旋转。然而,如果辅助器械具有两个定位元件,每个定位元件由单个线圈形成,例如可以是近侧定位元件和布置在远端区域中的定位元件,则可以分别基于确定的五个自由度重建每个相应线圈的第六自由度。特别可能的是辅助器械的远端区域以及因此布置在该区域中的定位元件与近侧定位元件成角度。两个定位元件的纵向轴线则不指向同一方向,而是彼此成一定角度。
[0062]
优选地,在近侧定位元件位于其中的区域中具有近侧定位元件的辅助器械至少分段地具有小于10nmm2的低弯曲刚度。有利地,即使在其中布置有近侧定位元件的区域中,辅助器械也保持相对挠性,并且当被插入管腔中时可以适应管腔的刚性形状。特别地,辅助器械然后也可以布置在其管腔具有一个或多个弯曲部段的这样的外科器械中。本身已经是挠性的外科器械有利地通过布置的辅助器械保持挠性,所述辅助器械在其中布置有近侧定位元件的那个区域中也具有附加的近侧定位元件。
[0063]
优选地,近侧定位元件的长度大小是近侧定位元件的外径大小的至少十倍。与布置在远端区域中的至少一个定位元件类似,近侧定位元件也可以具有相对较小的外径,并且由于其至少十倍的长度,被配置用于输出具有足以确定定位元件的位置和取向的信噪比的电压信号。由于外径由于至少十倍的长度而选择得相对较小,例如0.5mm或更小,因此辅助器械也可以至少分段地具有小于10nmm2的低弯曲刚度,特别是在其中布置有近侧定位元件的那个区域中。
[0064]
优选的是近侧定位元件配置成具有在2mh至4mh之间的总电感。同样在近侧定位元件中可以感生足够高的电压,使得抽头电压信号有利地具有这样的信噪比:其使得可以通过位置检测系统从抽头电压信号比较可靠地确定交变电磁场中的近侧定位元件的位置和取向。
[0065]
使用具有附加的近侧定位元件的辅助器械,一方面可以以特别有利的方式执行用于重建辅助器械的远端区域中的弯曲的方法。
[0066]
使用具有附加的近侧定位元件的辅助器械,另一方面也可以特别有利地实施用于重建其管腔中布置有辅助器械的外科器械的外部形状的方法。特别地,外科器械的外部形状可以在位于布置在外科器械的管腔中的辅助器械的两个定位元件之间的外科器械的那个区域中重建。
[0067]
用于重建辅助器械的远端区域的弯曲的方法和用于重建外科器械的外部形状的方法优选地都包括以下步骤:
[0068]
‑
生成交变电磁场,
[0069]
‑
用布置在远端区域中的定位元件输出电压信号,所述电压信号表示在所述定位元件中感生的电压,
[0070]
‑
用近侧定位元件输出电压信号,所述近侧定位元件从所述远端区域开始在所述辅助器械的近端的方向上与所述远端区域相距一定距离布置,其中所述电压信号表示在所述近侧定位元件中感生的电压,
[0071]
‑
基于从所述定位元件输出的电压信号确定布置在所述远端区域中的所述定位元件的位置和取向,以及
[0072]
‑
基于从所述近侧定位元件输出的电压信号确定与所述远端区域相距一定距离布置的所述近侧定位元件的位置和取向。
[0073]
在重建辅助器械的远端区域的弯曲的方法中,优选地基于布置在所述远端区域中的所述定位元件的确定的位置和取向以及与所述远端区域相距一定距离布置的所述近侧定位元件的确定的位置和取向来重建弯曲。
[0074]
在重建外科器械的外部形状的方法中,优选地基于布置在所述远端区域中的所述定位元件的确定的位置和取向以及与所述远端区域相距一定距离布置的所述近侧定位元件的确定的位置和取向来重建其管腔中布置有所述辅助器械的辅助器械的外部形状。外科器械的外部形状的重建尤其涉及在位于两个定位元件之间的区域中的外科器械的外部形状。特别有利于该区域中的外科器械的外部形状的重建,原因是近侧定位元件和布置在远端区域中的定位元件两者的位置和取向彼此独立地确定。为了重建外科器械的外部形状,可能必须考虑另外的机械边界条件,例如两个定位元件之间的空间关系以及它们在辅助器械内的布置。
[0075]
用合适的数据处理设备重建的外科器械的外部形状可以以各种方式在监视器上可视地显示。
[0076]
用于重建外科器械的外部形状的方法的可能应用是在例如微创耳鼻喉(ent)手术的领域中。例如,在插入人体时可以重建球囊导管的外部形状。如果球囊例如用压缩空气或流体膨胀,则可以基于位于远端区域中的定位元件的确定的位置和取向以及与远端区域相距一定距离布置的近侧定位元件的确定的位置和取向重建膨胀球囊的形状。然后将辅助器械以使得球囊定位于近侧定位元件和布置在远端区域中的辅助器械的定位元件之间的方式布置在球囊导管中。球囊膨胀的程度
‑
即,例如,膨胀球囊的近似直径
‑
可以基于引入球囊以膨胀球囊的流体(气体或液体)的压力或量来确定,使得不需要提供传感器来检测球囊的膨胀。然而,可以提供配置用于感测球囊膨胀的这样的传感器。
[0077]“重建辅助器械的远端区域中的弯曲”和“重建外科器械的外部形状”的步骤也可以是相同方法的一部分。在相同的方法中,可以重建辅助器械的远端区域的弯曲以及外科器械的外部形状两者。
[0078]
下面将参考附图描述本发明的实施例。在图中:
[0079]
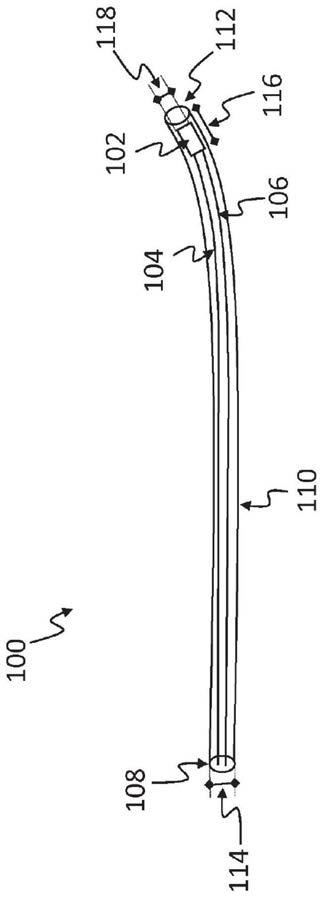
图1:示出了具有包封在管中的定位元件和电线的辅助器械的示意和简化图;
[0080]
图2:示出了由线圈形成的定位元件的示意和简化图,所述线圈在其每个线圈端处导电地连接到相应的电线;
[0081]
图3:示出了由围绕线圈芯卷绕的线圈形成的定位元件的示意和简化图;
[0082]
图4:示出了线圈芯的示意和简化图,所述线圈芯由可移动地串接在一起的若干部
件形成;
[0083]
图5:示出了可以由串接在一起的若干这样的部件形成的线圈芯的单个部件的示意和简化图;
[0084]
图6:示出了由围绕线圈芯卷绕的线圈形成的定位元件的示意和简化图,其中线圈的第一线圈端导电地连接到第一电线,线圈的第二线圈端导电地连接到线圈芯的远端,并且线圈芯的近端导电地连接到第二电线;
[0085]
图7:示出了由围绕线圈芯卷绕的线圈形成的定位元件的示意和简化图,其中线圈的第一线圈端导电地连接到第一电线,线圈的第二线圈端导电地连接到线圈芯的远端,并且线圈芯是第二电线;
[0086]
图8:示出了由围绕线圈芯卷绕的线圈形成的定位元件的示意和简化图,所述线圈具有弯曲部段;
[0087]
图9:示出了由包括串联连接的两个线圈的线圈装置形成的定位元件的示意和简化图,其中弯曲部段位于线圈之间,线圈装置在弯曲部段中导电地连接到第三电线;
[0088]
图10:示出了由线圈装置形成的定位元件的示意和简化图,其中线圈装置由串联连接的线圈形成;
[0089]
图11:示出了由线圈装置形成的定位元件的示意和简化图,其中线圈装置由串联连接的线圈形成并且每个线圈围绕相应的线圈芯卷绕;
[0090]
图12:示出了具有辅助器械的jamshidi针的示意图。
[0091]
图1示出了具有定位元件102的示意性描绘的辅助器械100。定位元件102导电地连接到两个电线104、106。导线104、106从定位元件102引导到辅助器械100的近端108。
[0092]
定位元件102和线104、106由管110围绕,管从辅助器械的近端108延伸到远端112。管110由生物相容性材料制成,使得辅助器械100特别适用于人体内的外科手术。管110具有0.5mm的外径114并且管的管壁具有0.1mm的厚度。管110延伸超过定位元件102的远端,使得管110的远端形成辅助器械100的远端112。因此,定位元件102靠近辅助器械100的远端112布置,使得远端区域116从定位元件102的近端延伸到管110的远端。定位元件102因此布置在辅助器械100的远端112附近的远端区域116内。
[0093]
定位元件102具有0.4mm的外径118和在2至4mh之间的电感。定位元件102可以例如由如参考图2、3、6、7或8所述的线圈或由如参考图9、10或11所描述的线圈装置形成。特别地,如果定位元件102由线圈或线圈装置形成,则辅助器械100在其中布置有定位元件102的远端区域116的那部分中至少分段地具有小于10nmm2的低弯曲刚度。具有本文给出的尺寸的由peek制成的管通常具有在5nmm2至10nmm2之间的弯曲刚度,使得辅助器械100在其中布置有定位元件102的远端区域116的那部分中的弯曲刚度优选地至少分段地基本上对应于管110的弯曲刚度。在弯曲刚度小于10nmm2的部段之间或部段之外,辅助器械100也可以具有大于10nmm2的弯曲刚度,特别是在其中布置有定位元件102的远端区域116的那部分中。然而,在具有外径小于0.5mm和长度大于5mm、优选大于10mm的线圈的定位元件102中,使用的管110的弯曲刚度可能大于定位元件102的弯曲刚度。如果管的管壁具有的厚度大约为定位元件的外径的厚度或甚至明显更大,则情况可能尤其如此。
[0094]
由于定位元件102的小外径118和管110的小外径114,辅助器械100本身比较细并且特别适合插入血管或插入具有小内径的管腔中,即使这些相对难以接近。这里,有利的是
辅助器械100,特别是在其中布置有定位元件102的远端区域116的那部分中,至少是分段挠性的。辅助器械100因此至少分段地具有相对较小的外径并且仍然是相对挠性的,尤其是在远端区域中。辅助器械100因此可以布置在或插入具有小内径的血管或管腔中并且挠性地适应由血管或管腔给出的形状。例如,如果人体的血管具有不同的分支,则可以通过在远端区域中弯曲辅助器械来选择分支,然后辅助器械的其余部分可以跟随辅助器械的远端进入该分支。
[0095]
具有定位元件102(其位置和取向可以用电磁位置检测系统确定)的辅助器械100可以有利地连接到这样的位置检测系统。通过位置检测系统,然后可以在将辅助器械插入血管中时确定定位元件102的位置和取向。关于定位元件102的位置和取向以及由此导出的辅助器械100的位置和取向的信息可以在插入血管中期间提供给辅助器械100的用户,使得他可以基于提供给他的信息改变或调整辅助器械100的操作。例如,辅助器械或布置有辅助器械的外科器械的位置可以在插入人体期间在被检查对象的断层摄影获得的截面图像中在监视器上向用户显示。由此,有利地,在将辅助器械插入血管中或将具有辅助器械的外科器械插入人体中时,可以避免错误并且/或者可以减少人体组织的机械应力。由于确定定位元件的位置和取向,因此用户能够以更有针对性和受控的方式使用辅助器械或具有辅助器械的外科器械。如果血管只有小内径、难以进入并且/或者具有敏感状况(例如具有敏感外壁)和/或外科器械必须精确定位和/或外科器械穿透到敏感组织(例如骨组织)中应在改善的控制下进行,则这是特别重要的。
[0096]
为了将辅助器械100与位置检测系统一起使用,辅助器械100通常经由电缆(未示出)连接到位置检测系统的数据处理设备(未示出),使得可以将抽头电压信号从定位元件102经由电线104、106传输到数据处理设备并由数据处理设备评估。辅助器械100例如可以经由插头连接(未示出)与相应的电缆连接。例如,辅助器械100可以具有导电地连接到电线104、106并位于辅助器械100的近端108处的连接部(未示出)。
[0097]
所示的辅助器械100的长度可以适应辅助器械100的计划使用。然而,优选地,辅助器械100具有在10cm至150cm之间的长度。
[0098]
辅助器械100也适合插入到外科器械(未示出)的管腔中。由于辅助器械100具有定位元件102(其位置和取向可以用电磁位置检测系统确定),辅助器械100可以用于将外科器械连接到位置检测系统。优选地,这样的外科器械具有辅助器械100可以布置在其中的小内径的管腔。管腔可以具有小内径,其尺寸刚好允许辅助器械不可移动地布置在管腔中。因此,具有管腔的外科器械本身也可以比较细。
[0099]
由于辅助器械100具有相对较小的外径,并且同时,尽管有定位元件,但至少分段地相对挠性,特别是在远端区域中,因此辅助器械可以适应外科器械的管腔的给定的形状或路线并且不可移动地布置在管腔中。
[0100]
图2示出了由线圈200形成的定位元件。在两个线圈端202、204中的每一个处,线圈200导电地连接到辅助器械(未示出)的电线206、208中的相应一个。线圈200配置成捕获例如由位置检测系统的场发生器(未示出)生成的交变电磁场。通过改变磁通密度,根据电磁感应原理在线圈200中生成电场。由此,线圈200中感生的电流取决于线圈相对于交变电磁场的取向。经由电线206、208,可以抽头表示施加在线圈端202、204之间的感生电压的特征电压信号。然后可以将电压信号传输到位置检测系统的数据处理设备(未示出)并由其评
估。通过位置检测系统,可以确定线圈相对于交变电磁场中的位置和取向。
[0101]
为了确保抽头电压信号具有足够好的信噪比,线圈200配置成具有在2mh至4mh之间的电感。对于给定的外径,线圈200因此必须具有相应数量的绕组和长度,使得实现该范围内的电感。小于0.5mm的外径通常导致长度大于10mm的线圈200。
[0102]
辅助器械还可以具有若干定位元件,每个定位元件由如图2中所示的线圈200形成。优选地,每个线圈然后分别与至少两个电线导电地连接。优选的是若干线圈彼此不电连接,使得可以从每个线圈抽头单独的并且特别是独立的电压信号。
[0103]
图3示出了由围绕线圈芯302卷绕的线圈300形成的定位元件。线圈300优选地如参考图2所述那样配置。由于线圈300的小于0.5mm的相对较小的外径,由于低几何惯性矩,线圈芯302通常具有明显小于10nmm2的弯曲刚度。因此,如果定位元件由如本文所述的具有线圈芯302的线圈300形成并且由辅助器械的管(未示出)围绕,则辅助器械的相关弯曲刚度可能由管的弯曲刚度确定。
[0104]
如果线圈芯302由具有高磁导率的材料制成,则线圈300的电感可以显著增加,使得例如2mh至4mh之间的电感已经可以用较少的绕组数实现。当保持线圈线径恒定时,较少的绕组数导致线圈300的较短长度。例如,线圈芯302可以由磁导率可高达10,000的软铁制成。所示的线圈芯302由单个部件形成并且从线圈300的近端304延伸到线圈300的远端306。
[0105]
然而,如果线圈芯由可移动地串接在一起的若干部件形成,则也可能是有利的。这样的线圈芯400在图4中示出。如果这样的线圈芯400卷绕有线圈,这会导致线圈电感增加的协同效应,同时增加可移动地串接在一起的线圈芯400的部件的移动性。线圈芯400的圆柱形部件的基部区域可以配置为平滑表面,如图4中所示。然而,为了避免在由若干部件形成的这种线圈芯400的弯曲期间形成更大的腔,可能有利的是一件这样的线圈芯400具有不同形状的基部区域。
[0106]
图5示出了部件500,其是由若干部件(未示出)形成的一件线圈芯。该圆柱形部件500没有平滑的基部区域。相反,一个基部区域502具有凹曲率并且相对的基部区域504具有凸曲率。由500的这样的部件形成的线圈芯然后可以以这样的方式组装:使得一个部件的相应凹曲率邻接相邻部件的凸曲率并且这些优选地精确地相互配合。然后两个部件可以像关节一样相对于彼此移动。还可能的是部件(未示出)具有两个凹形弯曲基部区域,并且线圈芯由串接在一起的若干这样的部件形成。各个部件然后可以在它们的凹形弯曲基部区域上彼此抵靠滚动,以便确保线圈芯的相对良好的移动性。
[0107]
图6示出了由围绕线圈芯602卷绕的线圈600形成的定位元件。第一线圈端604电连接到第一线606。第二线圈端608电连接到线圈芯602的远端610。线圈芯602的近端612导电地连接到第二线614。线圈芯602因此在线圈600的第二线圈端608和第二电线614之间建立导电连接。线圈600具有小于0.5mm的外径和优选地大于10mm的长度,特别是具有的绕组数和长度选择成使得线圈600具有在2mh至4mh之间的电感。有利地,线圈600的电感可以通过由具有高磁导率的材料形成的线圈芯来增加,使得进而可以选择相对较少数量的绕组以便实现在2mh至4mh之间的电感。由于线圈芯602在第二线圈端608和第二线614之间建立导电连接,因此没有必要将第二线614朝向线圈600的远端引导经过线圈600以将第二线614电连接到线圈600的第二线圈端608。定位元件的外径然后有利地不因穿过线圈600的线而增加。
[0108]
图7示出了由围绕线圈芯702卷绕的线圈700形成的定位元件。在第一线圈端704
处,线圈700导电地连接到第一线706。通过第二线圈端708,线圈700导电地连接到线圈芯702的远端710。在其近端712处,线圈芯延伸超过线圈的近端,特别是延伸到辅助器械(未示出)的近端。与参考图6描述的其中线圈芯在其近端处导电地连接到第二线的实施例相反,在这里所示的实施例中没有提供另外的线。而是,线圈芯本身形成延伸到辅助器械(未示出)的近端的第二线并且可以导电地连接到连接部(未示出),特别是连接到连接部的连接触点。有可能通过延伸到辅助器械的近端的线圈芯来赋予辅助器械额外的机械稳定性。
[0109]
图8示出了围绕线圈芯802卷绕并且具有弯曲部段804的线圈800。在弯曲部段804中,线圈800与线圈800的其余部分相比是相对挠性的。线圈800的弯曲部段804以这样的方式配置:使得在该部段中线圈800的每单位长度的绕组数小于线圈800的其余部分。仅示例性地,在所示的实施例中,在弯曲部段中仅提供两个绕组。这是为了更好地理解这里描述的线圈800的弯曲部段804,在具有弯曲部段的线圈的更现实的实施例中所述线圈在这样的弯曲部段中通常可以有几百个绕组,而线圈的相邻其余部分也可以有几千个绕组。与每单位长度具有恒定绕组数的线圈相比,这里所示的线圈800的弯曲部段804限定这样的部段:由于每单位长度的绕组数较少,当力施加在线圈上时所述部段优先弯曲。因此这样的线圈的其余部分承受相对较小的机械应力。单个线圈也可以具有若干弯曲部段,其中线圈的每单位长度的绕组数小于线圈的其余部分。在施加力的情况下,以该方式形成的线圈然后优选地在若干弯曲部段处弯曲。
[0110]
图8中所示的具有弯曲部段804的线圈800在第一线圈端806处与第一线808导电地连接并且在第二线圈端810处与第二线812导电地连接。然而,线圈800也可以在其第二线圈端810处导电地连接到线圈芯802的近端,如参考图6所述。然后线圈芯802的远端可以导电地连接到第二线812或者可以延伸到辅助器械的近端以形成第二电线本身,如参考图7所述。所示实施例中的线圈芯802由单个部件形成,但也可以由可移动地串接在一起的若干部件形成,如参考图4或5所述。
[0111]
图9示出了由串联连接的两个线圈902、904形成的线圈装置900。线圈装置900具有位于线圈902和904之间的弯曲部段906。由于两个线圈902、904的简单导线连接,在该弯曲部段906中,线圈装置900是相对挠性的。弯曲部段906因此限定这样的部段:在所述部段中线圈装置900在力的施加下优先弯曲,使得线圈本身在力的施加下相对较小地改变它们的形状。
[0112]
线圈902、904具有长度、外径和绕组数,其以使得各个线圈902、904的相应电感加起来为2mh至4mh之间的总电感的方式被选择。
[0113]
布置在近端908处的线圈902在其线圈近端处导电地连接到第一线910。在其线圈远端904处,布置在线圈装置900的远端912处的线圈904导电地连接到第二线914。经由第一线910和第二线914,可以抽头表示施加在线圈902的近端和线圈904的远端之间的电压的电压信号。线圈装置900还导电地连接到第三线916。在所示的实施例中,第三电线916在弯曲部段906中导电地连接到线圈装置900。因此,可以经由第一线910和第三线916抽头另外的电压信号,其表示施加在线圈902的远端和线圈902的近端之间的电压。此外,第三电压信号可以经由第三线916和第二线914抽头,表示施加在线圈904的远端和线圈904的近端之间的电压。
[0114]
经由导电地连接到这里所示的线圈装置的电线910、914、916,可以抽头分配给各
个线圈902、904的电压信号和分配给线圈装置900的电压信号。所有电压信号都可以传输到数据处理设备(未示出)并由其评估。然后可以从单独的电压信号或从所传输的电压信号的组合来确定定位元件的线圈装置900的位置和取向。如果仅从单个电压信号无法可靠地确定位置和取向,例如,由于信噪比接近或小于一,则通过比较电压信号,仍然可以得出关于交变电磁场中的线圈装置的位置和取向的结论。
[0115]
仅示例性地,线圈装置900仅由两个线圈902、904形成。然而,对于具有在2mh至4mh之间的总电感的线圈装置,取决于各个线圈的电感,线圈装置有多于两个的线圈可能是有必要的。优选地,在这几个线圈之间存在弯曲部段。在弯曲部段中,线圈装置可以分别导电地连接到另一导线,使得可以经由两个相应的线抽头分配给相应线圈的电压信号。例如,电压信号可以经由第四和第五线抽头,第四线在与相应线圈的近端相邻的弯曲部段中导电地连接到线圈装置,并且第五线在与所述相应线圈的远端相邻的弯曲部段中导电地连接到线圈装置。还可能的是,另外的线以使得可以抽头电压信号的方式导电地连接到线圈装置,所述电压信号表示施加在第一线圈的近端和相邻线圈的远端之间的电压并且可以因此分配给这几个线圈。
[0116]
图10示出了由串联连接的三个线圈1002、1004、1006形成的线圈装置1000。在线圈1002、1004、1006中的每两个之间有弯曲部段1008、1010。由于简单的导线连接,在该弯曲部段1008、1010中,线圈装置1000与布置有线圈1002、1004、1006的区域相比是相对挠性的。仅示例性地,这里将线圈1002、1004、1006的数量选择为三个。在这里未示出的实施例中,线圈装置也可以由串联连接的两个线圈或由串联连接的多于三个的线圈形成。由于各个线圈1002、1004、1006的电感加起来为线圈装置1000的2mh至4mh之间的总电感,因此将线圈1002、1004、1006的数量增加到线圈装置1000具有该范围内的总电感的这样的程度是有利的。特别地,如果线圈1002、1004、1006具有相对较小数量的绕组并且因此具有相对较小的电感,则相对较大数量的这样的线圈1002、1004、1006可能是必要的,以便线圈装置具有在2mh至4mh之间的总电感。
[0117]
在其线圈近端处,布置在线圈装置1000的近端1012处的线圈1002导电地连接到第一线1014。布置在线圈装置1000的远端1016处的线圈1006用其线圈远端导电地连接到第二线1018,使得经由第一线1014和第二线1018可以抽头电压信号,所述电压信号表示施加在线圈装置1000的线圈近端1012和线圈远端1016之间的电压。这里所示的线圈装置1000可以导电地连接到其他线,特别是在弯曲部段1008、1010中,如参考图9所述。如果弯曲部段1008、1010中的线圈装置1000分别导电地连接到另一电线,则可以抽头相应的其他电压信号。这些附加电压信号可以例如分配给线圈装置1000的相应线圈1002、1004、1006。
[0118]
图11示出了由串联连接的三个线圈1102、1104、1106形成的线圈装置1100。在线圈1102、1104、1106中的两个线圈之间分别具有弯曲部段1103、1105,在所述弯曲部段中线圈装置是相对挠性的。线圈1102、1104、1106中的每一个围绕相应的线圈芯1108、1110、1112卷绕。线圈芯1108、1110、1112中的每一个从相应线圈1102、1104、1106的近端延伸到所述相应线圈1102、1104、1106的远端。由于线圈芯1108、1110、1112中的每一个仅从相应线圈1102、1104、1106的近端延伸到远端,因此特别地,没有线圈芯1108、1110、1112布置在弯曲部段1103、1105中。因此弯曲部段1103、1105的弯曲刚度不受线圈芯1108、1110、1112影响,而仅由线圈1102、1104、1106之间的导线连接限定。
[0119]
布置在线圈装置1114的近端处的线圈1102在其线圈近端处导电地连接到第一线1116。布置在线圈装置1000的远端1118处的线圈1106在其线圈远端处导电地连接到第二线1120。如参考图9所述,线圈装置1100可以尤其在弯曲部段1103、1105中分别与另一线(未示出)导电地连接。经由第一线111 6和第二线1118,分配给线圈装置1100的电压信号可以被抽头,并且经由可选的另外电线,例如分配给各个线圈1102、1104、1106的其他电压信号可以被抽头。
[0120]
线圈1102、1104、1106均还可以具有另外的弯曲部段,其实现为在该部段中每单位长度的绕组数小于对应线圈1102、1104、1106的其余部分,如参考图8所述。由此,除了已经设置在线圈1102、1104、1106中的两个之间的弯曲部段1103、1105之外,还可以实现参考如图8所述配置的另外的弯曲部段,在所述弯曲部段中线圈装置1100在力的施加下优先弯曲。
[0121]
图12示出了作为具有辅助器械的外科器械的示例的示意性图示的jamshidi针1200。在jamshidi针1200的管腔1202中布置有辅助器械1204。辅助器械1204包括定位元件1206,其可以由如参考图2、3、6、7或8描述的线圈或由如参考图9、10或11描述的线圈装置形成。定位元件1206连接到两个线1208、1210,其从定位元件1206引导到辅助器械1204的连接部1212,用于与例如电缆(未示出)的互补连接部电接触。电缆可以在其另一端处连接到也未示出的位置检测系统。
[0122]
定位元件1206和线1208、1210由管1214围绕,这给予辅助器械1204额外的稳定性。经由线1208、1210和电缆,表示在定位元件1206中感生的电压的电压信号然后可以传输到位置检测系统并由其评估以确定定位元件1206的位置和取向。从定位元件1206的确定的位置和取向,然后可以计算jamshidi针1200的位置和取向。例如,在用jamshidi针1200进行手术之前,可以将定位元件1206配准到jamshidi针1200的尖端。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1