医疗器械组件及其使用方法与流程
1.本发明涉及容易安全地观察支气管末梢部的医疗器械组件及其使用方法。
背景技术:
2.迄今为止,作为肺病,公知有慢性阻塞性肺疾病(copd)、慢性支气管炎、肺癌等各种疾病。相对于这些肺病进行各种检查、处置,从而公知有各种检查方法、治疗器械等。
3.例如专利文献1公知了一种内窥镜导管,其具备轴、图像检测器和导丝,并具备设置于该轴主体的远位端的球囊部分。另外,专利文献1记载了利用上述内窥镜导管能够使导管在支气管那样的生物体内的管腔中前进至所希望的位置,并且进行图像诊断。
4.专利文献1:日本特开2016-182302号公报
5.在肺癌中,存在产生于支气管末梢部的肺癌。但是,由于支气管末梢部是极细的部分,所以现有技术中难以将支气管镜插入至支气管末梢部并利用内窥相机进行观察。例如在专利文献1的内窥镜导管中,在对球囊进行了加压的状态下将支气管镜插入支气管,因此插入阻力大,另外由于在内窥镜导管的外侧面设置球囊,所以球囊的直径也大,难以插入支气管末梢部。另外,支气管末梢部的末端是与脏层胸膜邻接的部分,若损伤脏层胸膜则存在肺穿孔而引起气胸的担忧,因此,要求观察时的安全性。
技术实现要素:
6.本发明是鉴于上述状况而完成的,其目的涉及容易安全地观察支气管末梢部的医疗器械组件及其使用方法。
7.能够解决上述课题的本发明所涉及的医疗器械组件如以下那样。
8.[1]一种医疗器械组件,其特征在于,具备:支气管镜,该支气管镜具有护套、内窥相机以及球囊导管,上述护套具有长轴方向且具有沿上述长轴方向延伸的第1内腔与第2内腔,上述内窥相机配置于上述第1内腔,上述球囊导管具有以能够沿上述长轴方向移动的方式插入上述第2内腔的轴与设置于上述轴的远位侧的球囊;和探测棒,该探测棒的远位端位于比上述球囊的远位端靠远位侧的位置,对支气管末梢部进行探测。
[0009]
支气管镜具备以能够沿长轴方向移动的方式插入护套的第2内腔的球囊导管,由此能够将球囊从护套的第2内腔向远位侧推出来扩张、收缩,之后拉回第2内腔内。由此,能够在通过球囊使支气管末梢扩张了后,在使球囊收缩的状态下将支气管镜插入支气管末梢,因此能够减少插入时的阻力。另外,在插入球囊导管时,若猛烈地过度插入则存在损伤与支气管末梢部的末端邻接的脏层胸膜的担忧,但通过使用探测支气管末梢部的探测棒,能够探测支气管末梢部的末端的位置,因此能够容易避免脏层胸膜的损伤。
[0010]
另外,本发明的医疗器械组件的优选的方式如以下的[2]~[14]那样。
[0011]
[2]在[1]记载的医疗器械组件的基础上,在上述支气管镜的第2内腔插入有上述探测棒。
[0012]
[3]在[1]或者[2]记载的医疗器械组件的基础上,上述轴与上述探测棒分别具备x
射线不透过部。
[0013]
[4]在[3]记载的医疗器械组件的基础上,上述探测棒的x射线不透过部位于比上述轴的x射线不透过部靠远位侧的位置。
[0014]
[5]在[3]或者[4]记载的医疗器械组件的基础上,上述轴在比上述球囊的不固定于上述轴的非固定部的近位端靠近位侧具备上述x射线不透过部。
[0015]
[6]在[3]~[5]中任一项记载的医疗器械组件的基础上,上述x射线不透过部是x射线不透过性标记。
[0016]
[7]在[1]~[6]中任一项记载的医疗器械组件的基础上,从上述球囊的不固定于上述轴的非固定部的远位端至上述探测棒的远位端为止的上述轴的长轴方向的距离(mm)是向上述球囊的内部注入了流体的状态下的上述球囊的上述轴的长轴方向中心处的外径(mm)的0.5倍以上的距离。
[0017]
[8]在[1]~[7]中任一项记载的医疗器械组件的基础上,进一步在上述第2内腔具备导丝。
[0018]
[9]在[1]~[8]中任一项记载的医疗器械组件的基础上,上述探测棒的远位端部在长轴方向的剖视图中具有曲率半径为0.1mm以上10mm以下的曲线部。
[0019]
[10]在[1]~[9]中任一项记载的医疗器械组件的基础上,上述探测棒含有树脂。
[0020]
[11]在[1]~[10]中任一项记载的医疗器械组件的基础上,上述探测棒含有金属。
[0021]
[12]在[1]~[11]中任一项记载的医疗器械组件的基础上,上述探测棒具备具有长轴方向的内腔。
[0022]
[13]在[1]~[12]中任一项记载的医疗器械组件的基础上,上述探测棒具备圆柱状部,上述圆柱状部的外径的长度(mm)小于上述球囊的近位端处的上述轴的外径。
[0023]
[14]在[1]~[13]中任一项记载的医疗器械组件的基础上,上述探测棒具备圆柱状部与设置于上述圆柱状部的远位端的球状部,上述球状部的外径大于上述圆柱状部的外径。
[0024]
另外,本发明还包括以下的医疗器械组件的使用方法。
[0025]
[15]一种医疗器械组件的使用方法,使用[1]~[14]中任一项记载的医疗器械组件,该医疗器械组件的使用方法的特征在于,包括将上述探测棒插入上述第2内腔,将上述探测棒的远位端部从上述第2内腔的远位端推出,之后将上述球囊从上述第2内腔的远位端推出的工序。
[0026]
根据本发明,通过上述结构,能够提供容易安全地观察支气管末梢部的医疗器械组件及其使用方法。
附图说明
[0027]
图1是本发明的实施方式所涉及的医疗器械组件的立体图。
[0028]
图2是表示本发明的实施方式所涉及的医疗器械组件的使用方法的侧视图(局部剖视图)。
[0029]
图3是表示本发明的实施方式所涉及的医疗器械组件的使用方法的侧视图(局部剖视图)。
[0030]
图4是表示本发明的实施方式所涉及的医疗器械组件的使用方法的侧视图。
[0031]
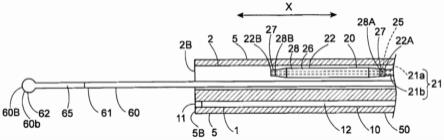
图5是图3的区域a中的球囊导管的长轴方向的剖视图。
[0032]
图6是本发明的实施方式所涉及的探测棒的一个例子的长轴方向的剖视图。
[0033]
图7是本发明的实施方式所涉及的探测棒的其他一个例子的长轴方向的剖视图。
[0034]
图8是本发明的实施方式所涉及的探测棒的其他一个例子的长轴方向的剖视图。
[0035]
图9是本发明的实施方式所涉及的探测棒的其他一个例子的长轴方向的剖视图。
[0036]
图10是表示图3的区域a中的球囊导管的长轴方向的剖面的其他一个例子的剖视图。
[0037]
图11是本发明的实施方式所涉及的支气管镜中的护套的远位端的俯视图。
具体实施方式
[0038]
以下,基于下述实施方式对本发明更具体地进行说明,但本发明当然不因下述实施方式而受到限制,能够在符合前、后述的主旨的范围内适当地施加变更来实施也是不言而喻的,它们均包含在本发明的技术范围内。需要说明的是,在各附图中,为了方便,也存在省略部件附图标记等的情况,但彼时请参照说明书、其他附图。另外,附图中的各种部件的尺寸优先有利于理解本发明的特征,因此存在与实际尺寸不同的情况。
[0039]
本发明的医疗器械组件具备:支气管镜,该支气管镜具备护套、内窥相机以及球囊导管,上述护套具有长轴方向且具有沿上述长轴方向延伸的第1内腔与第2内腔,上述内窥相机配置于上述第1内腔,上述球囊导管具有以能够沿上述长轴方向移动的方式插入上述第2内腔的轴与设置于上述轴的远位侧的球囊;和探测棒,该探测棒的远位端位于比上述球囊的远位端靠远位侧的位置,对支气管的末梢部进行探测。
[0040]
本发明的医疗器械组件通过支气管镜具备以能够沿长轴方向移动的方式插入护套的第2内腔的球囊导管,由此能够将球囊从护套的第2内腔向远位侧推出来扩张、收缩,之后拉回第2内腔内。由此,能够在利用球囊使支气管末梢扩张了后,在使球囊收缩的状态下将支气管镜插入支气管末梢,因此能够减少插入时的阻力。另外,在插入球囊导管时,通过使用探测支气管末梢部的探测棒,能够探测支气管末梢部的末端的位置,因此能够容易地避免球囊导管导致的脏层胸膜的损伤。这样,本发明的医疗器械组件能够减少插入时的阻力,并且能够容易地避免球囊导管导致的脏层胸膜的损伤,因此容易安全地观察支气管末梢部。
[0041]
以下,参照图1~图11,对本发明的实施方式所涉及的医疗器械组件及其使用方法进行说明。图1是本发明的实施方式所涉及的医疗器械组件的立体图。图2~图4是表示本发明的实施方式所涉及的医疗器械组件的使用方法的侧视图。此外,在图2、图3中,阴影线部分是护套的剖面。另外,在图3中,点划线表示球囊的轴的长轴方向中心处的外径。图5是图3的区域a中的球囊导管的长轴方向的剖视图。图6是本发明的实施方式所涉及的探测棒的一个例子的长轴方向的剖视图。图7~图9是本发明的实施方式所涉及的探测棒的其他一个例子的长轴方向的剖视图。图10是表示图3的区域a中的球囊导管的长轴方向的剖面的其他一个例子的剖视图。图11是本发明的实施方式所涉及的支气管镜中的护套的远位端的俯视图。
[0042]
如图1、图2所示那样,医疗器械组件80具备支气管镜50和探测棒60。其中,支气管镜50具备护套5,该护套5具有长轴方向x,且具有沿长轴方向x延伸的第1内腔1与第2内腔2。
护套5只要具有第1内腔1与第2内腔2,则没有特别限定,但优选外径为6mm以下,更优选外径为3mm以下。由此,能够容易地将护套5插入内径为2mm以下的支气管末梢。另一方面,护套5的外径的下限若考虑后述的内窥相机10的尺寸等,则优选为1mm以上,更优选为2mm以上。护套5的材料可列举聚酰胺系树脂、聚酯系树脂、聚氨酯系树脂、聚烯烃系树脂、氯乙烯系树脂、硅酮树脂、氟树脂、环氧树脂、天然橡胶等。它们中可以仅使用1种,也可以将2种以上并用。
[0043]
如图2所示那样,在第1内腔1配置有内窥相机10。内窥相机10优选以不沿长轴方向x移动的方式固定于第1内腔1。内窥相机10没有特别限定,例如可列举具备物镜11与图像传输单元12的结构。作为图像传输单元12,可举出由光纤构成的图像引导纤维(image guide fiber)、由多个透镜构成的中继透镜(relay lens)等。由内窥相机10得到的图像信息例如经由图1的支气管镜50的连接器部53被传输至显示装置,并显示于显示装置。
[0044]
如图2所示那样,在护套5的第2内腔2以能够沿长轴方向x移动的方式插入有具有轴21与设置于轴21的远位侧的球囊22的球囊导管20。具体而言,从图1所示的支气管镜50的插入孔52向护套5的第2内腔2内插入球囊导管20,由于球囊导管20不被固定,所以能够沿长轴方向x移动。另外,球囊22具备通过注入流体而被施加正压的加压内腔26。通过这些结构,如图3所示,能够将被插入第2内腔2内的球囊22从第2内腔2向远位侧推并使球囊22扩张,或者在使球囊22收缩了后拉回第2内腔2内。由此,能够在将球囊22收纳于第2内腔2内的状态下,向扩张了的支气管末梢插入护套5。
[0045]
对于探测棒60而言,如图2、图4所示那样,远位端60b位于比球囊22的远位端22b靠远位侧的位置,而对支气管末梢部101进行探测。探测棒60只要能够通过使远位端60b与支气管末梢部101接触时的触感来探测支气管末梢部101即可,长轴方向的长度以及粗细没有特别限定。如图2、图4所示那样,通过使探测棒60比球囊导管20先行一步来探测支气管末梢部101,例如能够基于探测棒60的插入长来掌握直至支气管末梢部101为止的距离。其结果,能够容易避免与过度推入球囊导管20相伴的脏层胸膜的损伤。
[0046]
优选在支气管镜50的第2内腔2插入有探测棒60。即,通过在与插入有球囊导管20的内腔相同的内腔插入探测棒60,不需要另外设置用于插入探测棒60的内腔,因此能够容易减少护套5的外径。
[0047]
优选轴21与探测棒60分别具备x射线不透过部。x射线不透过部是包含x射线不透过性物质的部分。在图2、图3、图5等中,轴21的内管21a具备x射线不透过部25,探测棒60具备x射线不透过部65。探测棒60能够通过插入时的触感而探测支气管末梢部101,但通过具备x射线不透过部65,能够利用x射线透视图像、ct等容易掌握探测棒60的位置,因此能够容易探测支气管末梢部101。轴21的x射线不透过部25也具备x射线不透过部25,由此能够利用x射线透视图像、ct等而容易掌握轴21的位置。另外,x射线不透过部25不局限于存在于轴21的一部分,也可以从轴21的近位端遍及远位端而存在。另外,x射线不透过部65不局限于存在于探测棒60的一部分,也可以从探测棒60的近位端遍及远位端而存在。
[0048]
作为x射线不透过性物质,例如可列举从由铅、钡、碘、钨、金、铂、铱、铂铱合金、不锈钢、钛、钴铬合金、钯以及钽构成的组选择的至少1种。
[0049]
如图2、图3所示,优选探测棒60的x射线不透过部65位于比轴21的x射线不透过部25靠远位侧的位置。由此,容易掌握支气管100内的探测棒60与轴21的位置关系,因此能够
容易避免与向比探测棒60的远位端b靠远位侧推入球囊导管20相伴的脏层胸膜的损伤。
[0050]
也可以是,轴21具备x射线不透过部25,探测棒60不具备x射线不透过部65。这样,探测棒60即便不具备x射线不透过部65,也能够通过插入时的触感来探测支气管末梢部101。另外,通过基于探测棒60的插入长等来掌握直至支气管末梢部101为止的距离,能够容易避免伴随着过度推入球囊导管20的脏层胸膜的损伤。
[0051]
如图2、图3、图5所示,优选轴21在比球囊22的不固定于轴21的非固定部28的近位端28a靠近位侧具备x射线不透过部25。由此,能够容易掌握球囊22的在体内的位置。
[0052]
优选轴21在固定有球囊22的远位侧的固定部27以及近位侧的固定部27中的至少一方具备x射线不透过部25,更优选在远位侧的固定部27以及近位侧的固定部27具备x射线不透过部25。由此,能够容易掌握球囊22的在体内的位置。
[0053]
优选轴21在从球囊22的轴21的长轴方向中心22c起20mm以内的区域具备x射线不透过部25,更优选在从球囊22的轴21的长轴方向中心22c起15mm以内的区域具备x射线不透过部25,进一步优选在从球囊22的轴21的长轴方向中心22c起10mm以内的区域具备x射线不透过部25。由此,能够容易掌握通过球囊22而扩张的支气管末梢部101的扩张部位。
[0054]
x射线不透过部25不局限于一处,也可以在轴21设置两处以上。例如,在球囊22具备直管部23的情况下,优选在轴21的与直管部23的近位端23a和远位端23b对应的位置分别设置有x射线不透过部25。由此,能够容易掌握通过直管部23而扩张的支气管末梢部101的扩张部位。
[0055]
x射线不透过部65不局限于一处,也可以在探测棒60设置两处以上。x射线不透过部65优选设置于在长轴方向从探测棒60的远位端60b起20mm以内的区域,更优选设置于从探测棒60的远位端60b起15mm以内的区域。由此,能够容易掌握探测棒60的远位端60b的位置。另一方面,在x射线不透过部65是后述的x射线不透过性标记的情况下,x射线不透过部65优选设置于在长轴方向从探测棒60的远位端60b分离0.5mm以上的区域,更优选设置于从探测棒60的远位端60b分离1.0mm以上的区域。由此,能够容易避免x射线不透过性标记导致的支气管末梢部101的损伤。另外,在探测棒60具备后述的球状部62的情况下,优选以与球状部62的近位端邻接的方式设置x射线不透过性标记。
[0056]
x射线不透过部25以及x射线不透过部65中的至少一方也可以是x射线不透过性标记。x射线不透过性标记的形状没有特别限定,但可举出环状、螺旋状等。作为构成x射线不透过性标记的材料,可举出上述x射线不透过性物质。x射线不透过性标记的长轴方向的长度优选为1.0mm以上,更优选为1.5mm以上,优选为20mm以下,更优选为15mm以下。
[0057]
x射线不透过部25与x射线不透过部65也可以是x射线不透过性标记。另外,可以是,x射线不透过部25与x射线不透过部65可以包含由x射线不透过性物质形成的部分,或者是在材料中混合x射线不透过性物质而形成的部分。另外,也可以是,x射线不透过部25是x射线不透过性标记,且x射线不透过部65包括由x射线不透过性物质形成的部分,或者是在材料中混合x射线不透过性物质而形成的部分。另外,也可以是,x射线不透过部25包含由x射线不透过性物质形成的部分,或者是在材料中混合x射线不透过性物质而形成的部分,且x射线不透过部65是x射线不透过性标记。优选这些中的x射线不透过部25是x射线不透过性标记,且x射线不透过部65包含由x射线不透过性物质形成的部分,或者是在材料中混合x射线不透过性物质而形成的部分。作为由x射线不透过性物质形成的部分,可举出由x射线不
透过性物质形成的线材所存在的部分。另外,作为包含由x射线不透过性物质形成的部分的方式,可举出树脂的至少一部分附着于由x射线不透过性物质形成的线材的方式。另外,作为在材料中混合x射线不透过性物质而形成的部分,可举出将x射线不透过性物质的微粒混合于树脂而形成的部分。
[0058]
优选从球囊22的不固定于轴21的非固定部28的远位端28b至探测棒60的远位端60b为止的轴21的长轴方向的距离(mm)是向球囊22的内部注入了流体的状态下的球囊22的轴21的长轴方向中心22c处的外径(mm)的0.5倍以上的距离。越接近支气管末梢部101的末端,支气管末梢部101在球囊22扩张时越容易损伤,但通过成为上述0.5倍以上的长度,能够容易避免伴随着球囊22过度接近支气管末梢部101的末端的损伤。因此,从远位端28b至远位端60b为止的轴21的长轴方向的距离(mm)更优选是球囊22的长轴方向中心22c处的外径(mm)的0.7倍以上,进一步优选是0.9倍以上,再进一步优选是1.0倍以上。另一方面,通过使从远位端28b至远位端60b为止的轴21的长轴方向的距离成为球囊22的长轴方向中心22c处的外径(mm)的7.0倍以下,能够使支气管末梢部101的末端的附近容易扩张。因此,从远位端28b至远位端60b为止的轴21的长轴方向的距离优选是球囊22的长轴方向中心22c处的外径(mm)的7.0倍以下,更优选是5.0倍以下,更优选是3.0倍以下。
[0059]
医疗器械组件80也可以进一步在第2内腔2具备导丝70。例如将导丝70在第2内腔2内配置于球囊导管20的内部,一边利用导丝70进行引导(先行)一边插入球囊导管20,由此能够容易顺畅地将球囊导管20插入至支气管末梢部101。
[0060]
作为导丝70的材料可举出金属,作为金属,可举出不锈钢、ni-ti超弹性合金等。作为导丝70的与长轴方向垂直的方向的剖面的形状,可举出圆形、矩形。另外,导丝70的外径优选小于探测棒60的外径。
[0061]
导丝70也可以具备x射线不透过部。导丝70的x射线不透过部优选位于比轴21的x射线不透过部25靠远位侧的位置。由此,能够容易掌握导丝70与轴21的位置关系。导丝70的x射线不透过部的其他的结构能够参照x射线不透过部25、x射线不透过部65的记载。
[0062]
探测棒60的远位端部60b优选在长轴方向的剖视图中具备曲率半径为0.1mm以上10mm以下的曲线部。曲率半径为0.1mm以上,由此能够容易避免支气管末梢部101的损伤。因此,曲率半径更优选为0.2mm以上,进一步优选为0.4mm以上。另一方面,通过成为10mm以下,能够将探测棒60容易地插入支气管末梢部101。因此,曲率半径优选为10mm以下,更优选为8mm以下,进一步优选为6mm以下。
[0063]
探测棒60的远位端部60b的形状没有特别限定,但可举出圆柱状、半球状、球状、锥形状等。其中,半球状或者球状容易避免支气管末梢部101的损伤,因此优选。此外,作为球状的远位端部60b,可举出图6、图7所示的形式,作为半球状的远位端部60b,可举出图8所示的形式。作为锥形状的远位端部60b,可举出图9所示的朝向远位侧缩径的形式。另外,作为探测棒60的除远位端部60b以外的部分的形状,可举出圆柱状、多棱柱状或者它们朝向远位侧缩径的形状等。其中,圆柱状容易发挥柔软性,因此优选。
[0064]
如图2、图3等所示,优选探测棒60具备圆柱状部61与设置于圆柱状部61的远位端的球状部62,球状部62的外径大于圆柱状部61的外径。球状部62的外径大于圆柱状部61的外径,由此能够容易避免探测棒60的远位端部60b导致的支气管末梢部101的损伤。
[0065]
优选探测棒60具备圆柱状部61,圆柱状部61的外径的长度(mm)小于球囊22的近位
端22a处的轴21的外径。由此,能够容易将探测棒60插入支气管末梢部101。另一方面,优选圆柱状部61的外径的长度(mm)是球囊22的远位端22b处的轴21的外径的0.3倍以上1.1倍以下。由此,能够容易传达支气管末梢部101的末端的触感。此外,在图3中,近位端22a处的轴21的外径相当于近位端22a处的轴21的外管21b的外径,远位端22b处的轴21的外径相当于远位端22b处的轴21的内管21a的外径。
[0066]
优选探测棒60含有树脂。探测棒60包含树脂,由此能够提高柔软性。作为该树脂,可举出聚酰胺系树脂、聚酯系树脂、聚氨酯系树脂、聚烯烃系树脂、氯乙烯系树脂、硅酮树脂、天然橡胶等。它们中可以仅使用1种,也可以将2种以上并用。这些树脂中的弹性体树脂的柔软性优异,因此优选。即,优选从由聚酰胺系弹性体、聚酯系弹性体、聚氨酯系弹性体、聚烯烃系弹性体、氯乙烯系弹性体以及硅酮系弹性体构成的组选择的至少1种。另外,也可以通过在该树脂中混合x射线不透过性物质而成形,由此形成x射线不透过部65。另外,探测棒60也可以由该树脂构成。作为探测棒60,具体可举出树脂线,作为树脂线的厚度方向剖面中的外形,例如可举出圆形、椭圆形、矩形等。
[0067]
优选探测棒60含有金属。作为探测棒60,具体可举出金属线,例如金属线的远位端部被上述树脂被覆的结构、金属线的远位端部被金属线圈被覆的结构容易提高远位端部的柔软性,因此优选。作为该金属线、金属线圈的材料,可举出镍钛合金等形状记忆合金、不锈钢、钛、钴铬合金、钨合金等。其中,优选为不锈钢。作为金属线的厚度方向剖面中的外形,例如可举出圆形、椭圆形、矩形等。
[0068]
如图6所示那样,优选探测棒60具备具有长轴方向x的内腔63。由此,能够提高探测棒60的柔软性,提高安全性。另外,也可以经由内腔63施与支气管扩张剂等药剂。
[0069]
如图7~图9所示那样,探测棒60也可以由实心材料形成。探测棒60由实心材料形成,由此能够容易传达支气管末梢部101的末端的触感。
[0070]
探测棒60的远位端部60b优选通过下述弯曲载荷的测定方法而求出的1.0mm推入时的弯曲载荷为0.17n以下。远位端部60b的1.0mm推入时的弯曲载荷成为0.17n以下,由此能够容易避免支气管末梢101的损伤。远位端部60b的1.0mm推入时的弯曲载荷更优选为0.16n以下,进一步优选为0.15n以下,再进一步优选为0.08n以下。下限没有特别限定,但例如也可以为0.001n以上。
[0071]
[弯曲载荷的测定方法]
[0072]
准备不锈钢制的长度方向的长度为5cm以上、与长度方向垂直的方向的宽度为2cm以上、厚度为2cm以上的长方体的下侧块;和不锈钢制的长度方向的长度为5cm以上、与长度方向垂直的方向的宽度为2cm以上、厚度为2cm以上的长方体的上侧块。接着,以探测棒60的长轴方向与下侧块和上侧块的长度方向平行的方式将探测棒60配置于下侧块与上侧块之间。接着,将下侧块的远位端、上侧块的远位端以及在长轴方向从探测棒60的远位端60b分离3cm的点以在探测棒60的长轴方向对齐的方式对位,利用下侧块与上侧块夹住探测棒60而将其固定。接着,对利用加压面为矩形的加压件将探测棒60的在长轴方向从远位端60b分离1.0mm的位置为止的部分向与探测棒60的长轴方向垂直的方向推入1.0mm时的载荷(n)进行测定。
[0073]
在探测棒60的近位端部也可以为了防滑等而设置有凸部或者凹部。另外,探测棒60的近位端部也可以不固定于支气管镜50等,也可以固定于支气管镜50等。具体而言,探测
棒60的近位端部例如也可以固定于护套5、球囊导管20等。
[0074]
如图3所示,优选向加压内腔26注入了流体的加压状态下的球囊22的轴21的长轴方向中心22c处的外径(mm)大于护套5的远位端5b处的护套5的外径(mm)。由此,能够容易使支气管末梢部101的内径大于护套5的外径,因此能够容易将护套5插入支气管末梢部101。球囊22的长轴方向中心22c处的外径(mm)更优选是护套5的远位端5b处的护套5的外径(mm)的1.2倍以上,进一步优选是1.5倍以上,再进一步优选是2.0倍以上,特别优选是2.5倍以上。另一方面,通过使球囊22的长轴方向中心22c处的外径(mm)成为护套5的远位端5b处的护套5的外径(mm)的5.0倍以下,能够容易避免支气管末梢部101的损伤。因此,优选为5.0倍以下,更优选为4.5倍以下,进一步优选为4.0倍以下,再进一步优选为3.5倍以下。
[0075]
球囊22的形状没有特别限定,但可以具备图3所示那样的直管部23与锥形部24,也可以具备球状部或者长球状部。球囊22的与支气管末梢部101的内壁接触的接触面积越大,越容易使支气管末梢部101扩张,因此优选具备直管部或者长球状部,更优选具备直管部。另一方面,球囊22的长轴方向的长度越短,越容易使球囊22在扩张、收缩之后收纳于第2内腔2,因此只要是球状部则容易收纳。
[0076]
在球囊22具备直管部23的情况下,在向加压内腔26注入了流体的加压状态下,从直管部23的近位端23a至远位端23b的轴21的长轴方向的长度(mm)优选是球囊22的轴21的长轴方向中心22c处的外径(mm)以上的长度。由此,能够容易使支气管末梢部101在大范围内扩张,因此能够容易向支气管末梢部101插入护套5。因此,从近位端23a至远位端23b的长度(mm)更优选是球囊22的长轴方向中心22c处的外径(mm)的1.1倍以上,进一步优选是1.2倍以上。另一方面,从近位端23a至远位端23b为止的长度(mm)的上限没有特别限定,例如也可以是球囊22的长轴方向中心22c处的外径(mm)的5倍以下。
[0077]
在球囊22具备球状部或者长球状部的情况下,从球状部或者长球状部的近位端至远位端为止的轴21的长轴方向的长度(mm)优选是球囊22的轴21的长轴方向中心22c处的外径(mm)以上的长度。由此,能够容易使支气管末梢部101在大范围内扩张,因此能够容易向支气管末梢部101插入护套5。因此,从近位端至远位端的长度(mm)更优选是球囊22的长轴方向中心22c处的外径(mm)的1.1倍以上,进一步优选是1.2倍以上。另一方面,从上述近位端至远位端为止的长度(mm)的上限没有特别限定,例如也可以是球囊22的长轴方向中心22c处的外径(mm)的5倍以下。
[0078]
球囊22优选是非顺应性球囊或者半顺应性球囊。若注入流体的压力成为恒定以上则它们难以扩张,因此能够容易避免球囊22过度扩张而引起的支气管末梢部101的损伤。其中,半顺应性球囊容易兼顾安全性与支气管末梢部101的扩张,因此更优选。对于非顺应性球囊而言,从球囊的规定压力(成为标称值的压力=标称压力)的50%加压至规定压力的情况下的球囊22的长轴方向中心22c处的外径变化率为4%以下。另一方面,对于半顺应性球囊而言,从球囊的规定压力(成为标称值的压力=标称压力)的50%加压至规定压力的情况下的球囊22的长轴方向中心22c处的外径变化率为超过4%,15%以下。上述规定压力优选为2atm以上20atm以下,更优选为3atm以上10atm以下。
[0079]
作为构成球囊22的树脂,可举出聚酰胺系树脂、聚酯系树脂、聚氨酯系树脂、聚烯烃系树脂、氯乙烯系树脂、硅酮树脂、天然橡胶等。它们中可以仅使用1种,也可以将2种以上并用。
[0080]
为了提高相对于扩张压力的尺寸稳定性,球囊22也可以构成为在由上述树脂形成的树脂层的外侧面设置加强材料。作为加强材料,例如能够使用纤维材料。加强材料可以无间隙地设置于树脂层的外侧面的整体,也可以仅设置于树脂层的外侧面的一部分。作为用作加强材料的纤维材料,可举出聚芳酯纤维、芳族聚酰胺纤维、超高分子量聚乙烯纤维、pbo纤维、碳纤维等。这些纤维材料可以是单丝,也可以是复丝。
[0081]
注入球囊22的加压内腔26的流体没有特别限定,也可以是液体或者气体的任一种。流体只要例如通过注射器、充气机、泵等加压并注入加压内腔26即可。
[0082]
球囊22的个数不限定于一个,也可以是2个以上。球囊22的数量越少,越容易从第2内腔2出入,因此球囊22的个数优选为一个。
[0083]
在护套5的与长轴方向垂直的方向的剖面中,第2内腔2的面积(mm2)优选是收缩状态下的球囊22的外周线所围起的区域的面积(mm2)的1.2倍以上。由此,即便在使球囊22配置于第2内腔2内的状态下,也能够容易地施加负压而使护套5的远位端5b吸附于支气管100的内壁。另外,通过使护套5的远位端5b在吸附于支气管100的内壁的状态下滑动,由此能够擦去附着于内窥相机10的支气管100内的夹杂物。因此,第2内腔2的面积(mm2)更优选是收缩状态下的球囊22的外周线所围起的区域的面积(mm2)的1.3倍以上,进一步优选是1.4倍以上。另一方面,通过使第2内腔2的面积(mm2)成为收缩状态下的球囊22的外周线所围起的区域的面积(mm2)的8倍以下,由此能够容易避免伴随着使护套5的远位端5b过度吸附于支气管100的内壁的损伤。更优选是6.5倍以下,进一步优选是5倍以下。
[0084]
如图2、图3、图5所示那样,轴21也可以具有内管21a与外管21b。内管21a能够用作导丝等的插通路径。另外,在图2、图3、图5中,球囊22的远位端侧通过远位侧的固定部27固定于内管21a,球囊22的近位端侧通过近位侧的固定部27固定于外管21b。通过这样的结构,能够使内管21a与外管21b之间的空间成为用于注入流体的流路,另外,能够使内管21a与球囊22之间的空间成为加压内腔26。另外,如图3、图5那样,内管21a的远位端21b可以位于比球囊22的远位端22b靠远位侧的位置,也可以位于与远位端22b在长轴方向对齐的位置。
[0085]
如图10所示那样,轴21也可以具备外管21b与配置于外管21b内的线状体21c。由此,能够利用远位侧的固定部27将球囊22的远位端侧固定于线状体21c,利用近位侧的固定部27将球囊22的近位端侧固定于外管21b。通过这样的结构,能够使线状体21c与外管21b之间的空间成为用于注入流体的流路,另外,能够使线状体21c与球囊22之间的空间成为加压内腔26。另外,如图10那样,线状体21c的远位端21c可以位于比球囊22的远位端22b靠远位侧的位置,也可以位于与远位端22b在长轴方向对齐的位置。
[0086]
此外,虽未图示,但轴21也可以不具备内管21a、外管21b,而由线状体21c构成。
[0087]
内管21a可以包含从例如由聚酰胺系树脂、聚酯系树脂、聚氨酯系树脂、聚烯烃系树脂、氟树脂、氯乙烯系树脂、硅酮树脂以及天然橡胶构成的组选择的至少1种,也可以包含从由聚酰胺系弹性体、聚酯系弹性体、聚氨酯系弹性体、聚烯烃系弹性体、氯乙烯系弹性体以及硅酮系弹性体构成的组选择的至少1种。它们中可以仅使用1种,也可以将2种以上并用。其中,优选包含从由聚酰胺系树脂、聚烯烃系树脂以及氟树脂构成的组选择的至少1种。
[0088]
内管21a也可以具有加强部件。作为加强部件,可举出编织线材而成的编织体或者将线材呈螺旋状缠绕而成的线圈体。由此,能够容易提高内管21a的强度。
[0089]
作为构成加强部件的线材,可举出金属线、纤维等。作为构成金属线的材料,例如
优选不锈钢、钛、镍钛合金、钴铬合金、钨合金等。其中,更优选不锈钢。金属线可以是单线,也可以是绞合线。作为纤维,例如可举出聚芳酯纤维、芳族聚酰胺纤维、超高分子量聚乙烯纤维、pbo纤维、碳纤维等。纤维可以是单丝,也可以是复丝。
[0090]
外管21b可以包含从由聚酰胺系树脂、聚酯系树脂、聚氨酯系树脂、聚烯烃系树脂、氟树脂、氯乙烯系树脂、硅酮树脂以及天然橡胶构成的组选择的至少1种,也可以包含从由聚酰胺系弹性体、聚酯系弹性体、聚氨酯系弹性体、聚烯烃系弹性体、氯乙烯系弹性体以及硅酮系弹性体构成的组选择的至少1种。它们中可以仅使用1种,也可以将2种以上并用。其中,优选是从由聚酰胺系树脂、聚烯烃系树脂以及聚氨酯系树脂构成的组选择的至少1种。
[0091]
作为线状体21c,可举出金属线、树脂线等。作为金属线,远位端部由树脂被覆的结构(所谓的聚合物护套类型)、远位端部由金属线圈被覆的结构(所谓的线圈护套类型)容易提高远位端部的柔软性,因此优选。作为金属线、树脂线的厚度方向剖面的外形,例如可举出圆形、椭圆形、矩形等。
[0092]
作为该金属线、金属线圈的材料,可举出镍钛合金等形状记忆合金、不锈钢、钛、钴铬合金、钨合金等。其中,优选不锈钢。
[0093]
作为用于该树脂线、金属线的被覆的树脂,可举出聚酰胺系树脂、聚酯系树脂、聚氨酯系树脂、聚烯烃系树脂、氟树脂、氯乙烯系树脂、硅酮树脂、天然橡胶等。其中,优选是从由聚酰胺系弹性体、聚酯系弹性体、聚氨酯系弹性体、聚烯烃系弹性体、氯乙烯系弹性体以及硅酮系弹性体构成的组选择的至少1种。
[0094]
如图10所示那样,球囊导管20优选具备从非固定部28的远位端28b朝向远位侧延伸的棒状部59。
[0095]
球囊导管20优选通过下述弯曲载荷的测定方法而求出的棒状部59的1.0mm推入时的弯曲载荷为0.17n以下。棒状部59的1.0mm推入时的弯曲载荷为0.17n以下,由此能够容易避免支气管末梢部101的损伤。棒状部59的1.0mm推入时的弯曲载荷更优选为0.15n以下,进一步优选为0.12n以下,再进一步优选为0.08n以下。下限没有特别限定,但例如也可以为0.003n以上。
[0096]
[弯曲载荷的测定方法]
[0097]
准备不锈钢制的长度方向的长度为5cm以上、与长度方向垂直的方向的宽度为2cm以上、厚度为2cm以上的长方体的下侧块;和不锈钢制的长度方向的长度为5cm以上、与长度方向垂直的方向的宽度为2cm以上、厚度为2cm以上的长方体的上侧块。接着,以轴21的长轴方向与下侧块和上侧块的长度方向平行的方式将球囊导管20配置于下侧块与上侧块之间。接着,将下侧块的远位端、上侧块的远位端以及球囊22的非固定部28的远位端28b以在轴21的长轴方向对齐的方式对位,利用下侧块与上侧块夹住球囊导管20而将其固定。接着,对利用加压面为矩形的加压件将棒状部59的在轴21的长轴方向从远位端分离1.0mm的位置为止的部分向与轴21的长轴方向垂直的方向推入1.0mm时的载荷(n)进行测定。
[0098]
如图1所示那样,球囊导管20优选在近位侧具有手柄部29。手柄部29优选具有与内管21a连通的在长轴方向延伸的内腔。该内腔能够用作导丝等的插通路径。另外,优选手柄部29具备流体的注入部29a,并具有与用于向球囊22的加压内腔26注入流体的流路连通的内腔。
[0099]
在第2内腔2的近位端侧优选连结有负压产生装置。作为负压产生装置,可举出具
有泵的负压产生装置。例如如图1所示,负压产生装置(未图示)只要安装于与护套5的第2内腔2的近位端直接或者间接连通的负压产生装置安装口51即可。
[0100]
如图11所示那样,在护套5的远位端5b,第2内腔2的中心与物镜11的中心的距离优选是第2内腔2的直径的2倍以下。由此,能够在使护套5的远位端5b吸附于支气管100的内壁并滑动时,容易除去附着于物镜11的夹杂物。更优选是1.5倍以下,进一步优选是1.2倍以下。另一方面,下限例如也可以是0.6倍以上。
[0101]
如图11所示那样,在护套5的远位端5b,第2内腔2的中心优选不位于护套5的中心。由此,通过使护套5在长轴方向旋转等,能够容易使第2内腔2的远位端2b吸附于所希望的位置。
[0102]
在护套5的远位端5b,第2内腔2的直径的长度(mm)优选为物镜11的直径(mm)以上的长度。由此,能够容易使护套5的远位端5b吸附于支气管100的内壁,从而能够容易地除去附着于物镜11的夹杂物。第2内腔2的直径的长度(mm)更优选为物镜11的直径(mm)的1.2倍以上,进一步优选为1.5倍以上。另一方面,第2内腔2的直径的长度(mm)可以为物镜11的直径(mm)的3.0倍以下,也可以为2.5倍以下。
[0103]
在护套5的远位端5b,在使由护套5的外周围起的区域的面积成为100面积%时,第2内腔2的面积率优选为10面积%以上。由此,吸附力提高,从而能够容易使护套5的远位端5b吸附于支气管100的内壁。更优选为15面积%以上,进一步优选为20面积%以上。另一方面,上限没有特别限定,但例如可以为80面积%以下,也可以为60面积%以下。
[0104]
在护套5的长轴方向上,物镜11的远位端优选如图2所示那样位于与护套5的远位端5b相同的位置,或者位于比护套5的远位端5b靠远位侧的位置。由此,能够容易擦去附着于物镜11的支气管100内的夹杂物。另外,护套5的长轴方向上的物镜11的远位端与护套5的远位端5b的距离优选为5mm以下,更优选为3mm以下,进一步优选为1mm以下。由此,能够容易使护套5的远位端5b吸附于支气管100的内壁。
[0105]
如图11所示那样,护套5可以具备具有长轴方向x的第3内腔3,也可以进一步具备具有长轴方向x的第4内腔4。另外,在第3内腔3可以插入有第1照明透镜30,在第4内腔4也可以插入有第2照明透镜40。由此,能够容易观察支气管末梢部101。第1照明透镜30、第2照明透镜40优选分别以不沿长轴方向x移动的方式固定于第3内腔3、第4内腔4。
[0106]
在护套5的远位端5b,除第2内腔2以外的内腔优选被密封。由此,能够容易提高第2内腔2中的吸附力。
[0107]
在从护套5的远位端5b在长轴方向分离1cm的位置为止的护套5的外侧面优选不设置与第2内腔2连通的贯通孔。由此,能够容易提高第2内腔2的吸附力。另外,在从护套5的远位端5b在长轴方向分离3cm的位置为止的护套5的外侧面更优选不设置与第2内腔2连通的贯通孔,在护套5的外侧面从护套5的远位端5b遍及近位端进一步优选不设置贯通孔。
[0108]
在护套5的近位侧优选如图1所示以内置护套5的近位侧的方式设置有操作部55。具有操作部55,由此操作者能够一边握住操作部55一边调整护套5的插入角度等。作为操作部55,可举出树脂制的壳体。
[0109]
护套5也可以在近位侧分支为2个以上。例如在分支为2个的情况下,只要使一方的分支的第2内腔2的近位端与操作部55的负压产生装置安装口51连结,使另一方的分支的第2内腔2的近位端与操作部55的插入孔52连结即可。另外,护套5也可以不在近位侧分支。在
该情况下,例如只要将第2内腔2的近位端与负压产生装置安装口51连结,另一方面,从第2内腔2朝向外侧面设置贯通孔并使该贯通孔与通向操作部55内的插入孔52的通路连通即可。另外,例如只要将第2内腔2的近位端与插入孔52连结,另一方面,从第2内腔2朝向外侧面设置贯通孔并使该贯通孔与通向操作部55内的负压产生装置安装口51的通路连通即可。
[0110]
在插入孔52优选设置有在向第2内腔2施加负压时对插入孔52进行密封的密封部件。由此,能够容易提高第2内腔2的吸附力。在插入孔52优选设置有在向第2内腔2施加负压n时对插入孔52进行密封的密封部件。由此,能够容易提高第2内腔2的吸附力。作为该密封部件,可举出设置有缺口的钳塞,具体可举出y连接器的存在缺口的硅棒(silicon rod)。
[0111]
另外,本发明还包括医疗器械组件80的使用方法。医疗器械组件80的使用方法包括将探测棒60插入第2内腔2,将探测棒60的远位端部60b从第2内腔2的远位端2b推出,之后将球囊22从第2内腔2的远位端2b推出的工序。这样,通过使探测棒60比球囊导管20先行一步来探测支气管末梢部101,能够容易避免伴随着猛烈地过度插入球囊导管20的脏层胸膜的损伤。
[0112]
医疗器械组件80的使用方法优选进一步包括:对球囊22施加正压而使球囊22扩张的工序、对球囊22施加负压而使球囊22收缩的工序、将球囊22拉回第2内腔2内的工序、将支气管镜50向远位侧推入的工序以及利用内窥相机10进行观察的工序。这样通过球囊22使支气管末梢101扩张,并在使球囊22收缩的状态下将支气管镜50插入支气管末梢部101,由此减少插入阻力,因此能够容易插入。
[0113]
球囊22的扩张如图3所示可以在探测棒60从第2内腔2外延的状态下进行,也可以在将探测棒60拉回第2内腔2内后进行。
[0114]
在对球囊22施加正压而使球囊22扩张的工序中,优选施加正压时的从护套5的远位端5b至球囊22的非固定部28的近位端28a为止的距离(mm)是球囊22的非固定部28的从近位端28a至远位端28b为止的距离(mm)的3倍以下。由此,能够容易在被扩张的支气管末梢部101收缩前插入。
[0115]
医疗器械组件80的使用方法也可以包括对第2内腔2施加负压而使护套5的远位端5b吸附于支气管100的内壁的工序。另外,也可以包括在使护套5的远位端5b吸附于支气管100的内壁的状态下,使护套5的远位端5b滑动,来除去附着于内窥相机10的远位端的支气管100内的夹杂物的工序。由此,能够容易观察支气管末梢部101。
[0116]
本技术主张基于在2019年10月16日申请的日本专利申请第2019-189684号的优先权的利益。为了参照,在本技术中引用在2019年10月16日申请的日本专利申请第2019-189684号的说明书的所有内容。
[0117]
附图标记说明
[0118]
1...第1内腔;2...第2内腔;2b...第2内腔的远位端;3...第3内腔;4...第4内腔;5...护套;5b...护套的远位端;10...内窥相机;11...物镜;12...图像传输单元;20...球囊导管;21...轴;21a...内管;21b...外管;21c...线状体;21c...线状体的远位端;22...球囊;22a...球囊的近位端;22b...球囊的远位端;22c...球囊的轴的长轴方向中心;23...直管部;23a...直管部的近位端;23b...直管部的远位端;24...锥形部;25...x射线不透过部;26...加压内腔;27...固定部;28...非固定部;28a...非固定部的近位端;28b...非固定部的远位端;29...手柄部;29a...注入部;30...第1照明透镜;40...第2照明透镜;50...
支气管镜;51...负压产生装置安装口;52...插入孔;53...连接器部;55...操作部;59...棒状部;60...探测棒;60b...探测棒的远位端;60b...探测棒的远位端部;61...圆柱状部;62...球状部;63...探测棒的内腔;65...x射线不透过部;70...导丝;80...医疗器械组件;100...支气管;101...支气管末梢部。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1