具有可变形宽度的宽夹的制作方法
具有可变形宽度的宽夹
1.相关申请的交叉引用
2.本技术要求于2019年12月18日提交的序列号为62/949,563的美国临时申请的优先权,该美国临时申请的全部内容在此通过参引并入。
技术领域
3.所公开的主题涉及用于身体组织的血管内的、经皮的或微创手术治疗、比如组织接近或瓣膜修复的医疗装置。更特别地,本公开涉及心脏瓣膜和静脉瓣膜的修复。
4.身体组织的手术修复可以涉及组织接近以及这些组织在接近的装置中的紧固。在修复瓣膜时,组织接近包括将瓣膜的瓣叶对合在治疗装置中,该治疗装置然后可以通过紧固或固定瓣叶而被保持。这种对合可以用于治疗通常发生在二尖瓣和三尖瓣中的返流。
5.二尖瓣返流的特征在于从心脏的左心室通过机能不健全的二尖瓣到左心房中的逆向流。在心肌收缩(心脏收缩)的正常循环期间,二尖瓣用作用以防止含氧血液流动回到左心房中的止回阀。以这种方式,含氧血液通过主动脉瓣膜被泵送到主动脉中。二尖瓣的返流可以显著地降低心脏的泵送效率,从而使患者面临严重的、进行性心力衰竭的风险。
6.二尖瓣返流可能由二尖瓣或左心室壁中的多种不同的机械缺陷引起。瓣膜瓣叶、将瓣叶连接至乳头肌的瓣膜腱索、乳头肌或左心室壁可能被损坏或以其他方式机能失调。通常,瓣膜环可能被损坏、扩张或弱化,从而限制二尖瓣抵抗左心室的高压力而充分闭合的能力。
背景技术:
7.用于二尖瓣返流的治疗依赖于包括瓣叶重塑和瓣环重塑的瓣膜置换或修复,瓣环重塑通常称为瓣膜成形术。另一种依赖于将相对的瓣膜瓣叶的相邻区段缝合在一起的用于二尖瓣修复的技术被称为“蝴蝶结”或“缘对缘”技术。优选地,装置和系统的使用不应当需要开胸通路,并且相反能够在血管内执行、即使用从患者的脉管系统中的远离心脏的点推进至心脏的诸如导管之类的装置执行。此外,这样的装置和系统应当允许在固定之前将固定装置(例如,瓣膜修复夹)重新定位并可选地移除以确保最佳安置。这样的装置和系统同样可以用于修复身体中除心脏瓣膜之外的组织。
技术实现要素:
8.所公开的主题的目的和优点将根据后面的描述被阐明并且是明显的,并且将通过实践所公开的主题来了解。所公开的主题的附加的优点将通过在所公开的主题的书面描述和权利要求中以及从附图中特别地指出的方法和系统来实现和获得。
9.为了实现这些和其他优点并且根据所公开的主题的目的,如所体现的和大致地描述的那样,所公开的主题涉及一种用于治疗患者的固定装置。
10.根据所公开的主题,一种用于固定心脏瓣膜的瓣叶的固定装置包括中央组件以及相对于中央组件以可移动的方式联接的至少一个臂。至少一个臂包括可变形框架,该可变
形框架具有第一端部和第二端部以及限定在该第一端部与该第二端部之间的纵向轴线,第二端部能够在闭合位置与打开位置之间移动。可变形框架还包括可变形的第一挠曲部分和可变形的第二挠曲部分,每个挠曲部分沿着可变形框架的相应的侧向侧部延伸并且具有变形状态和未变形状态,并且每个挠曲部分具有外侧向边缘。至少一个臂在挠曲部分处于变形状态的情况下具有最大变形臂侧向截面尺寸,并且在挠曲部分处于未变形状态下具有限定在第一挠曲部分的外侧向边缘与第二挠曲部分的外侧向边缘之间的最大未变形臂宽度。最大变形臂侧向截面尺寸与最大未变形臂宽度之比至少为1:1.3。固定装置还包括至少一个夹持元件,至少一个夹持元件能够相对于至少一个臂移动以将原生瓣叶捕获在至少一个夹持元件与至少一个臂之间。
11.根据所公开的主题,可变形框架还可以包括沿着纵向轴线限定的槽,并且进一步地,第一挠曲部分可以包括从槽的第一侧向侧部侧向地延伸的可变形的第一翼部延伸部,并且第二挠曲部分包括从槽的第二侧向侧部侧向地延伸的可变形的第二翼部延伸部。第一翼部延伸部和第二翼部延伸部各自可以具有第二端部边缘,该第二端部边缘从可变形框架的第二端部以限定在第二端部边缘与纵向轴线之间的第二端部角度侧向地延伸,其中,第二端部角度在15度与45度之间。包括槽以及第一翼部延伸部和第二翼部延伸部的可变形框架可以是单件结构。附加地,第一翼部延伸部和第二翼部延伸部可以各自包括沿着第一翼部延伸部和第二翼部延伸部的相应的侧向边缘限定的至少一个凹口。附加地或替代性地,第一翼部延伸部和第二翼部延伸部可以各自包括敞开的翼部延伸部框架,该敞开的翼部延伸部框架在平面图中限定贯通该敞开的翼部延伸部框架的翼部开口。最大未变形臂宽度可以靠近可变形框架的第二端部。
12.此外,在槽沿着纵向轴线限定的情况下,槽可以沿着臂的长度在槽的相对的侧向侧部之间靠近最大未变形臂宽度具有更大的宽度。以这种方式,至少一个夹持元件可以具有联接至固定装置的一部分的第一端部和能够相对于至少一个臂移动的第二端部,其中,夹持元件靠近夹持元件的第二端部具有更大的宽度。第一翼部延伸部和第二翼部延伸部可以由形状记忆材料制成。
13.根据所公开的主题的另一方面,第一挠曲部分可以包括沿着可变形框架的第一侧向侧部纵向地延伸的可变形的第一侧翼构件,并且第二挠曲部分可以包括沿着可变形框架的第二侧向侧部纵向地延伸的可变形的第二侧翼构件,处于变形状态下的第一侧翼构件和第二侧翼构件与纵向轴线大致平行地对准。处于未变形状态下的第一侧翼构件和第二侧翼构件可以各自至少具有其远离纵向轴线向外延伸的长度。
14.可变形框架还可以包括第一支柱,该第一支柱从第一侧翼构件侧向地延伸至第二侧翼构件,其中,第一支柱包括铰链部分,该铰链部分在可变形框架处于变形状态的情况下具有压缩构型并且在可变形框架处于未变形状态的情况下具有伸展构型。铰链部分可以朝向伸展状态被偏置。可变形框架还可以包括端部支柱,该端部支柱在可变形框架的第二端部处从第一侧翼构件侧向地延伸至第二侧翼构件。端部支柱可以包括铰链部分,该铰链部分在可变形框架处于变形状态的情况下具有压缩构型,并且在可变形框架处于未变形状态的情况下具有伸展构型,第一支柱可以与端部支柱纵向地间隔开。
15.替代性地,可变形框架可以包括从第一侧翼构件朝向第二侧翼构件侧向地延伸的第一支柱和从第二侧翼构件朝向第一支柱构件侧向地延伸的第二支柱。可变形框架还可以
包括端部支柱,该端部支柱在可变形框架的第二端部处从第一侧翼构件侧向地延伸至第二侧翼构件。端部支柱可以包括铰链部分,该铰链部分在可变形框架处于变形状态的情况下具有压缩构型并且在可变形框架处于未变形状态的情况下具有伸展构型。第一支柱和第二支柱可以处于重叠滑动布置以用于在变形状态与未变形状态之间相对于彼此的运动。替代性地,第一支柱和第二支柱可以在可变形框架处于未变形状态的情况下彼此侧向地间隔开。固定装置还可以包括中间支承构件,该中间支承构件在第一侧翼构件与第二侧翼构件之间与纵向轴线平行地延伸。
16.如也在本文中所体现的,可变形框架可以包括从第一侧翼构件朝向第二侧翼构件侧向地延伸的多个第一支柱和从第二侧翼构件朝向第一支柱构件侧向地延伸的多个第二支柱。多个第一支柱和多个第二支柱可以构造成在变形状态下彼此互锁并且在未变形状态下彼此释放。第一侧翼构件和第二侧翼构件可以各自具有靠近可变形框架的第二端部的渐缩部分。附加地或替代性地,至少一个臂可以包括在第一侧翼构件与第二侧翼构件之间延伸的可扩张网状部分。第一侧翼构件和第二侧翼构件可以包括形状记忆材料。
17.根据所公开的主题的另一方面,一种用于固定心脏瓣膜的瓣叶的系统包括具有内径的导引导管和用于固定心脏瓣膜的瓣叶的固定装置。该装置包括中央组件以及相对于中央组件以可移动的方式联接的至少一个臂。至少一个臂包括可变形框架,该可变形框架具有第一端部和第二端部以及限定在第一端部与第二端部之间的纵向轴线。第二端部可以在闭合位置与打开位置之间移动。可变形框架还包括可变形的第一挠曲部分和可变形的第二挠曲部分。每个挠曲部分沿着可变形框架的相应的侧向侧部延伸并且具有变形状态和未变形状态。每个挠曲部分具有外侧向边缘。至少一个臂在挠曲部分处于变形状态的情况下具有最大变形臂侧向截面尺寸,并且在挠曲部分处于未变形状态下具有限定在第一挠曲部分的外侧向边缘与第二挠曲部分的外侧向边缘之间的最大未变形臂宽度。最大变形臂侧向截面尺寸与最大未变形臂宽度之比至少为1:1.3。固定装置还包括至少一个夹持元件,至少一个夹持元件能够相对于至少一个臂移动以将原生瓣叶捕获在至少一个夹持元件与至少一个臂之间。
18.最大变形臂侧向截面尺寸可以小于导引导管的内径,并且最大未变形臂宽度可以大于导引导管的内径。
附图说明
19.图1是根据所公开的主题使用的固定装置的示例性实施方式的立体图。
20.图2a是图1的固定装置的前视图,其中,用虚线描绘了较长的可选臂。
21.图2b至图2d是图1的固定装置在不同位置处的前视图,其中,用虚线描绘了较长的可选臂。
22.图3a是图1的固定装置的前视示意图,固定装置在其中具有捕获的瓣叶。
23.图3b是图1的固定装置的侧视图,其示意性地描绘了接触片区域。
24.图5是根据所公开的主题的臂的处于未变形状态下的可变形框架的示例性实施方式的平面图。
25.图6是图1的固定装置的与所公开的主题的臂的对应的可变形框架的平面图对准的部分的前视横截面图。
26.图6a至图6c是图1的固定装置的一部分的侧视图,其各自具有根据所公开的主题的臂的处于未变形状态下的可变形框架的替代性实施方式。
27.图7a至图7b是根据所公开的主题的臂的处于未变形状态下的可变形框架的不同实施方式的立体图。
28.图8是图1的固定装置的一部分的侧视图,其具有根据所公开的主题的臂的处于未变形状态下的可变形框架的示例性实施方式。
29.图9是根据所公开的主题的臂的处于变形状态下的可变形框架的替代性实施方式的示意性平面图。
30.图10是图1的固定装置的一部分的侧视图,其具有根据所公开的主题的臂的处于未变形状态下的可变形框架的替代性实施方式。
31.图11是图10的立体图,其包括臂的可变形框架的替代性实施方式。
32.图12是图1的固定装置的一部分的侧视图,其具有所公开的主题的臂的处于未变形状态下的可变形框架的另一示例性实施方式和夹持元件。
33.图13是用于递送图1的固定装置的系统的远端端部的示例性实施方式的立体图。
34.图14是根据图13的递送系统的导引导管的远端端部的立体图。
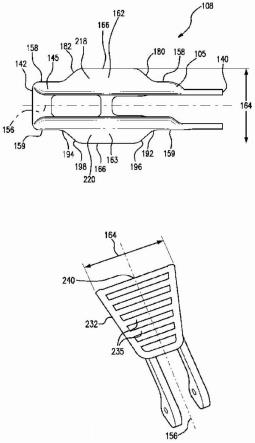
35.图15a至图15b是根据所公开的主题的臂的分别处于变形状态和未变形状态下的可变形框架的示例性实施方式的立体图。
36.图16a至图16b是根据所公开的主题的臂的分别处于变形状态和未变形状态下的可变形框架的另一实施方式的平面图。
37.图17是图1的固定装置的一部分的侧视图,其具有根据所公开的主题的臂的处于未变形状态下的可变形框架的另一实施方式的示例性实施方式。
38.图18a至图18b是根据所公开的主题的臂的分别处于变形状态和未变形状态下的可变形框架的替代性实施方式的立体图。
39.图18c是根据所公开的主题的图18a至图18b的臂的可变形框架的替代性实施方式中的两个替代性实施方式的横截面端部视图。
40.图19a至图19b是根据所公开的主题的臂的分别处于变形状态和未变形状态下的可变形框架的另一实施方式的立体图。
41.图20是图1的固定装置的具有凸台特征的替代性实施方式的示意性俯视图。
具体实施方式
42.现在将详细地参照所公开的主题的各种示例性实施方式,在附图中图示了所公开的主题的示例性实施方式。
43.用于与所公开的主题一起使用的固定装置为具有各种状况、包括返流二尖瓣或三尖瓣的患者提供了缘对缘的经导管的瓣膜修复选择。已经使用诸如mitraclip经导管二尖瓣修复装置之类的固定装置建立了经导管的(例如,经中隔的)缘对缘的瓣膜修复。这些固定装置通常构造成使用两种类型的瓣叶接触元件来捕获和固定相对的原生瓣叶。第一元件是瓣膜下臂(也称为远端元件或固定元件),该瓣膜下臂用以接触待抓握的原生瓣叶的心室侧。在将臂定位在下方以使跳动的心脏中的原生瓣叶稳定的情况下,第二夹持元件(例如,近端元件)可以朝向臂下降或移动并且与原生瓣叶的心房侧接触以将瓣叶捕获在臂与第二
夹持元件之间。一旦每个原生瓣叶被相应的臂和夹持元件捕获,固定装置就可以通过使臂朝向固定装置的中心升起或移动而闭合从而使得瓣叶对合,这导致在心室收缩期间瓣膜返流减少。此外,可以在臂和/或夹持元件上设置覆盖物以促进组织与捕获的瓣叶一起向内生长。
44.下文阐述了根据所公开的主题的示例性固定装置的其他细节。此外,多个专利和出版物公开了这种固定装置和相关操作的其他细节和方面。例如参见:lucatero等人的美国专利no.7,226,467;goldfarb等人的美国专利no.7,563,267;goldfarb等人的美国专利no.7,655,015;goldfarb等人的美国专利no.7,736,388;goldfarb等人的美国专利no.7,811,296;goldfarb等人的美国专利no.8,057,493;goldfarb等人的美国专利no.8,303,608;goldfarb等人的美国专利no.8,500,761;goldfarb等人的美国专利no.8,734,505;goldfarb等人的美国专利no.8,740,920;goldfarb等人的美国专利no.9,510,829;goldfarb等人的美国专利no.7,635,329;goldfarb等人的美国专利申请公开no.2017/0042546;goldfarb等人的美国专利申请公开no.2017/0239048;abunassar等人的美国专利申请公开no.2018/0325671,这些专利和公开申请中的每一者的全部内容通过参引并入本文中。
45.在用于二尖瓣疾病的抓握组织和瓣叶捕获时,某些患者状况和解剖结构、比如与瓣叶梢部之间较大的动态间隙相关联的那些患者状况和解剖结构可能为捕获带来挑战。因此,固定装置有机会能够比如在功能性二尖瓣返流(fmr)中桥接较大的间隙,同时例如在动态、混乱或过度严重的退行性二尖瓣返流(dmr)的情况下、比如在巴洛综合征的情况下还提供更可靠的瓣叶捕获。特别地,固定装置的臂的尺寸和构型可以显著地改进性能。然而,这样的改型可以构造成考虑许多因素以产生期望的临床益处并且仍然能够通过导引导管而经血管地递送。例如,用于递送的典型的导引导管尺寸可以具有大约0.22英寸或更小的内径。此外,导引导管在定位在患者体内时限定了下述曲折路径:固定装置可以穿过该曲折路径被递送。因此,固定装置可以构造成能够通过导引导管的相应的弯曲和转弯进行这种递送。
46.附加地,并且如先前所指出的,固定装置可以构造成将瓣叶捕获或抓握在臂与夹持元件之间。固定装置在处于闭合位置时可以促进定位在处于最终植入状态下的两个臂之间的相邻瓣叶的进一步捕获。这种捕获可以是瓣叶的如由臂的宽度和构型所限定的接触片区域的函数。因此,沿着臂的选定长度增大臂宽度可以增大接触片区域和相应的捕获。附加地,臂可以构造成具有灵活性以增大通过导引导管的可递送性。以这种方式,并且根据所公开的主题,臂可以包括可变形框架,该可变形框架产生用于递送的期望的变形侧向截面尺寸和用以提供期望的接触片区域的合适的未变形宽度和构型。
47.通常,并且如下文更详细地阐述的,本文中所提供的公开主题包括一种用于固定心脏瓣膜的瓣叶的固定装置,该固定装置包括中央组件以及相对于中央组件以可移动的方式联接的至少一个臂。至少一个臂包括可变形框架,该可变形框架具有第一端部和第二端部以及限定在第一端部与第二端部之间的纵向轴线,第二端部能够在闭合位置与打开位置之间移动。可变形框架还包括可变形的第一挠曲部分和可变形的第二挠曲部分,每个挠曲部分沿着可变形框架的相应的侧向侧部延伸并且具有变形状态和未变形状态,并且每个挠曲部分具有外侧向边缘。至少一个臂在挠曲部分处于变形状态的情况下具有最大变形臂侧
向截面尺寸,并且在挠曲部分处于未变形状态下具有限定在第一挠曲部分的外侧向边缘与第二挠曲部分的外侧向边缘之间的最大未变形臂宽度。最大变形臂侧向截面尺寸与最大未变形臂宽度之比至少为1:1.3。固定装置还包括至少一个夹持元件,至少一个夹持元件可以相对于至少一个臂移动以将原生瓣叶捕获在至少一个夹持元件与至少一个臂之间。
48.出于说明而非限制的目的,参照图1至图2a,本文中公开了一种用于固定心脏瓣膜的原生瓣叶的固定装置104。如本文中所体现的固定装置包括中央组件171。中央组件171可以包括用于操作和释放固定装置的各种中央部件,例如,如在其整体上通过参引并入本文中的专利和申请的公开内容中进一步描述的联接构件174。如所描绘的固定装置还包括相对于中央组件171以可移动的方式联接的至少一个臂108。如所示出的,固定装置还可以包括相对于中央组件171以可移动的方式联接的第二臂110。仅出于理解和参照的目的,图1、图2a至图2d以及图3a至图3b描绘了没有所公开的主题的挠曲部分的臂。
49.出于说明而非限制,参照图2a,每个臂108、110可以绕相应的轴线点148、150在闭合位置、打开位置和倒置位置以及这些位置之间的任何位置之间旋转或移动。此外,臂108、110可以从适当长度的范围中选择,其中,适当长度可以由医生或医疗保健提供者在检查患者之后进行选择。出于比较的目的,在图2a中用实线描绘了每个臂108、110的第一长度,并且用虚线描绘了所公开的主题的每个臂的较长的第二长度。如与用虚线描绘的对应的臂相比,用实线描绘的每个臂可以是具有不同长度的完全独立的臂。
50.如本文中在图2b至图2d中所描绘的,出于说明而非限制的目的描绘了固定装置104的各种位置。较长的臂以虚线图示出以用于与较短的臂进行比较。在图2b中,固定装置处于闭合位置,其中,臂定位成轴向地对准,例如,如所示出的竖向地或几乎竖向地对准。图2c和图2d图示了彼此之间以角度a定位的臂。在图2c中,角度a为大约10度,并且在图2d中,角度a为大约60度。如本文所公开的,固定装置在角度a为大约30度或更小时处于闭合位置,然而在更大厚度的瓣叶被捕获在臂之间时可以产生另一角度。尽管未描绘,但是臂可以继续打开直到角度a超过180度为止,例如,臂可以继续打开至倒置。
51.如先前总体指出的,并且如下文进一步详细阐述的,原生瓣叶可以被捕获在每个臂与相应的夹持元件之间。然后每个臂可以朝向臂的闭合位置移动。以这种方式,相邻的瓣叶可以进一步被捕获在处于闭合位置的两个臂之间。例如,并且仅用于说明,图3a至图3b示出了固定装置104,固定装置104被描绘为臂108、110在其之间捕获有两个瓣叶的情况下处于大约20度至30度的角度a,其中,每个瓣叶被捕获在臂与相应的夹持元件(其中,夹持元件为了清楚起见而未示出)之间。如图3b所图示的,用虚线描绘的接触片222由臂之间的组织接触的区域限定。接触片区域222表示由瓣叶的与对应瓣叶接触的区域限定的组织到组织的接触片区域。如先前所指出的,图3b描绘了当每个臂不包括挠曲部分并且固定装置的臂处于大约20度至30度的角度a时的代表性接触片区域。角度a可以影响接触片区域222,其中,减小的角度a可以增大接触片区域222,并且同样地,增大的角度a可以减小接触片区域222。
52.根据所公开的主题,臂构型被设置成具有包括可变形挠曲部分的可变形框架,以增大相邻的瓣叶在固定装置的处于闭合位置或最终植入位置的两个臂之间的接触片区域和捕获。附加地,每个臂可以构造成使接触片区域与臂的第一端部间隔开、比如位于沿着臂的长度的中间或靠近臂的第二端部。此外,可变形框架具有用于递送的变形状态和用于最
终植入的未变形状态。臂的可变形框架可以由形状记忆材料制成,例如,由镍钛合金或在可变形框架处于变形状态时能够扭曲的其他足够挠性的材料制成。
53.出于说明而非限制的目的,图4中描绘了用于根据所公开的主题的固定装置的包括可变形框架的臂的平面图。尽管为了清楚起见,图4和贯穿本技术的其他附图仅描绘了单个臂,但是应理解的是,至少一个臂108的各种特征可以类似地适用于一个或更多个附加的臂、比如第二臂110。至少一个臂108相对于中央组件171以可移动的方式联接。
54.如图4所示,所公开的主题的臂108包括可变形框架105,可变形框架105具有第一端部140和第二端部142以及限定在第一端部140与第二端部142之间的纵向轴线156。可变形框架105包括可变形的第一挠曲部分218和可变形的第二挠曲部分220。每个挠曲部分沿着可变形框架105的相应的侧向侧部延伸并且具有变形状态和未变形状态。此外,每个挠曲部分具有外侧向边缘166。至少一个臂108在未变形状态下具有限定在第一挠曲部分218的外侧向边缘166与第二挠曲部分220的外侧向边缘166之间的最大未变形臂宽度164。
55.如本文中所公开的,挠曲部分可以设置成具有用以促进臂的变形状态的各种构型。此外,所讨论的主题的可变形框架105还包括槽145,该槽145沿着纵向轴线156限定以接纳如本文中所描述的夹持元件116。例如,并且如本文中所体现的,第一挠曲部分218可以包括从槽的第一侧向侧部158侧向地延伸的可变形的第一翼部延伸部162,并且第二挠曲部分220可以包括从槽的第二侧向侧部159侧向地延伸的可变形的第二翼部延伸部163。如图4中所描绘的,第一翼部延伸部和第二翼部延伸部在未变形状态下在每个翼部延伸部162、163的外侧向边缘166之间限定最大未变形臂宽度164。出于递送的目的,每个翼部延伸部可以比如通过将每个翼部延伸部沿着槽的相应的侧向侧部折叠或卷曲进行变形,以便基本类似于比如图3b中所描绘的轮廓和构型。以这种方式,处于变形状态下的臂108在挠曲部分218、220处于变形状态时限定最大变形臂侧向截面尺寸165,如本文中所体现的,该最大变形臂侧向截面尺寸165大致等于槽145的相对的侧向侧部之间的侧向截面尺寸。出于说明而非限制的目的,包括槽145以及第一翼部延伸部162和第二翼部延伸部163的可变形框架105可以是单件结构。此外,第一翼部延伸部162和第二翼部延伸部163可以由包括例如如以下进一步描述的形状记忆材料的各种不同的材料制成。
56.如本文中所体现的,并且参照图4,第一翼部延伸部162和第二翼部延伸部163可以各自具有第一端部边缘180和第二端部边缘182,其中,第一端部边缘180可以在槽的相应的侧向侧部158、159与外侧向边缘166之间延伸。如所描绘的,第一端部边缘180可以定位成更接近或靠近槽145的第一端部140。第二端部边缘182可以在槽的相应的侧向侧部158、159与外侧向边缘166之间延伸。第二端部边缘182可以定位成更接近或靠近槽的第二端部142。进一步参照图4,第一端部边缘180可以在与槽的相应的侧向侧部158、159的相交部处具有第一端部圆角192。同样地,第二端部边缘182可以在与槽的相应的侧向侧部158、159的相交部处具有第二端部圆角194。附加地,并且如为了说明而非限制而进一步描绘的,第一端部边缘180可以在与外侧向边缘158的相交部处具有第一端部倒角196。同样地,第二端部边缘182可以在与外侧向边缘166的相交部处具有第二端部倒角198。图4中所描绘的翼部延伸部旨在用于说明而非限制的目的,并且设想了具有各种其他构型和尺寸的翼部延伸部。
57.如先前所指出的,并且根据所公开的主题,固定装置104还包括至少一个夹持元件116,例如如图1所示。夹持元件116可以相对于至少一个臂108移动以将第二原生瓣叶捕获
在夹持元件116与至少一个臂之间。特别地,至少一个夹持元件116具有联接至固定装置的一部分的第一端部228和可以相对于至少一个臂108移动的第二端部230。根据所公开的主题,每个臂可以构造成限定沿着纵向轴线156对准的槽145或者具有沿着纵向轴线156对准的槽145。槽可以构造成在其中接纳夹持元件116。
58.如本文中所体现的,每个夹持元件包括比如成排的多个摩擦元件152。例如,每个夹持元件116、118可以具有至少四排摩擦元件152。摩擦元件152可以允许在瓣叶捕获期间改进组织接合。如果固定装置在初始的瓣叶捕获之后需要调节,则臂可以被打开,夹持元件可以被竖向地升起,并且组织可以与固定装置断开接合,从而便于重新抓握和捕获。
59.例如,并且再次参照图1,并且如本文中所进一步体现的,每个夹持元件116、118可以朝向每个相应的臂108、110被偏置。在瓣叶捕获之前,每个夹持元件116、118可以朝向装置的纵向中心向内(例如,远离每个相应的臂108、110)移动并且在一个或更多个夹持元件线(未示出)的帮助下保持,夹持元件线可以呈缝合线、导线、棒、线缆、聚合物线或其他合适的结构的形式。夹持线元件可以以多种方式、比如通过穿过设置在夹持元件116、118上的环(未示出)而与夹持元件116、118操作性地连接。
60.如先前所指出的,并且如图5所示,至少一个夹持元件116沿着至少一个夹持元件116的长度可以具有多个摩擦元件152。根据所公开的主题的另一方面,臂和相应的夹持元件可以对准成使得当至少一个夹持元件116被接纳在至少一个臂108的槽内时,多个摩擦元件152沿着以下长度设置:该长度限定在一个端部处的第一端部边缘180和槽的相应的侧向侧部158、159的相交部与另一个端部处的第二端部边缘182和相应的翼部延伸部的槽的相应的侧向侧部158、159的相交部之间。这种构型还可以增大在挠曲部分、例如翼部延伸部的区域处的瓣叶组织固定。在本文中所体现的构型中,定位在每个翼部延伸部的第一端部和第二端部处的摩擦元件可以通过在所需的位置处的更牢固的接合来减少或消除组织腐蚀。
61.所讨论的主题的臂的尺寸、形状和结构可以根据需要变化或选定以适应性能标准。例如,而非限制地,本文中公开了根据所讨论的主题的具有包括翼部延伸部的挠曲部分的替代性臂构型的各种框架。即,框架105的构型可以被选择以提供每个臂的期望的性能(例如,以捕获并保持瓣叶,以跟踪通过导引导管并缩回到导引导管中等)。例如,如与图4中的翼部延伸部的构型进行比较,图6a至图6c中所公开的第一翼部延伸部162和第二翼部延伸部163各自还包括沿着第一翼部延伸部162和第二翼部延伸部163的相应的侧向边缘限定的至少一个凹口222以增大翼部延伸部的挠性。如本文中所描绘的,具有凹口的翼部延伸部可以包括第一端部倒角194和第二端部倒角198,第一端部倒角194和第二端部倒角198分别从第一端部边缘180和第二端部边缘182延伸,直到外侧向边缘166朝向臂的纵向轴线延伸为止。如图6a和图6c所描绘的,凹口222可以延伸直至槽145或者延伸到槽145中。替代性地,并且如图6b中所描绘的,凹口222可以在槽145之前终止。此外,各种翼部延伸部可以变化,如所描述的,例如,其中,第一端部倒角和第二端部倒角在图6b和图6c中相对较大,而相比之下,在图6a中相对较小。凹口的最内点(例如,凹口的最深点)处的未变形臂宽度可以比最大未变形臂宽度164小大约25%至50%。例如,最大未变形臂宽度164可以为大约0.20英寸并且凹口的最内点处的未变形臂宽度可以在大约.010英寸与0.15英寸之间。同样地,最大未变形臂宽度164可以为大约0.40英寸并且凹口的最内点处的未变形臂宽度可以在大约.020英寸与0.25英寸之间。
62.参照图7a至图7b,公开了翼部延伸部的替代性实施方式,其中,第一翼部延伸部162和第二翼部延伸部163各自包括敞开的翼部延伸部框架224,敞开的翼部延伸部框架224在平面图中限定贯通敞开的翼部延伸部框架224的翼部开口226。尽管未示出,但是本文中所公开的每个翼部延伸部的实施方式可以替代性地构造为敞开翼部延伸部框架。以这种方式,并且根据所公开的主题,敞开翼部延伸部框架224可以进一步增大可变形框架105的可压缩性。
63.如本文中在图8中进一步体现的,出于说明而非限制的目的公开了一种被称为鸭嘴臂构型的替代性臂构型。在鸭嘴臂构型中,第一翼部延伸部162和第二翼部延伸部163各自具有第二端部边缘182,第二端部边缘182从可变形框架142的第二端部以限定在第二端部边缘182与纵向轴线156之间的第二端部角度186侧向延伸。第二端部角度186可以在15度与45度之间。当未变形且植入时,第二端部角度形成渐缩部,该渐缩部减小了在各种情况下、例如在使用某些方形夹臂的情况下可能出现的不期望的焦点应力。附加地,并且如本文中在图8中进一步体现的,最大未变形臂宽度164和相应的接触片区域可以靠近可变形框架的第二端部142。出于递送的目的,每个翼部延伸部162、163可以比如通过使每个翼部延伸部沿着槽145的相对的侧向侧部158、159折叠或卷曲进行变形,以便基本类似于比如图3b中所描绘的轮廓和构型。以这种方式,臂的处于变形状态下的可变形框架105在挠曲部分218、220处于变形状态的情况下限定最大变形臂侧向截面尺寸165,如本文中所体现的,最大变形臂侧向截面尺寸165大致等于槽145的相对的侧向侧部158、159之间的侧向截面尺寸。
64.根据所公开的主题的另一方面,并且出于说明而非限制性目的而参照图9,第一挠曲部分可以包括沿着可变形框架的第一侧向侧部纵向地延伸的可变形的第一侧翼构件。同样地,第二挠曲部分可以包括沿着可变形框架的第二侧向侧部纵向地延伸的可变形的第二侧翼构件。处于变形状态下的第一侧翼构件和第二侧翼构件可以与纵向轴线大致平行地对准。
65.例如,并且如本文中所体现的,第一挠曲部分218可以包括沿着可变形框架262的第一侧向侧部纵向地延伸的可变形的第一侧翼构件232,并且第二挠曲部分220可以包括沿着可变形框架264的第二侧向侧部纵向地延伸的可变形的第二侧翼构件234。如图9所示,处于变形状态下的第一侧翼构件232和第二侧翼构件234与纵向轴线156大致平行地对准。如所示出的,出于说明而非限制性目的,可变形框架105可以包括从第一侧翼构件232侧向地延伸至第二侧翼构件234的第一支柱236。第一支柱236可以包括铰链部分240,铰链部分240在可变形框架105处于变形状态的情况下具有压缩构型,如例如图9所示。
66.附加地,并且如本文中进一步图示的,可变形框架105可以包括在可变形框架105的第二端部处从第一侧翼构件232侧向地延伸至第二侧翼构件234的端部支柱242。端部支柱242可以包括铰链部分240,铰链部分240在可变形框架105处于变形状态的情况下具有压缩构型并且在可变形框架105处于未变形状态的情况下具有伸展构型。如本文中所体现的,第一支柱236可以与端部支柱242纵向地间隔开。为了能够实现变形状态与未变形状态之间的运动,包括第一侧翼构件232和第二侧翼构件234以及支柱236、242的可变形框架可以包括形状记忆材料并且朝向未变形状态偏置,并且/或者进行热处理以在达到或超过预先确定的温度时朝向未变形状态扩张。尽管未示出,但是设想了另外的变型、比如具有端部支柱242和铰链部分240的可变形框架105,其中,不包括附加的支柱(例如,第一支柱236)。
67.根据所公开的主题的另一方面,并且继续参照图9以及进一步参照图20,固定装置104可以包括对应于第一臂108的第一凸台258(示意性地描绘)和对应于第二臂110的第二凸台260。第一凸台258和第二凸台260中的每一者可以具有渐缩的几何形状或弯曲的几何形状(例如,半球形形状)。如本文中所体现的,出于说明而非限制性目的,凸台258、260可以紧固至联接构件174。当臂108、110朝向闭合位置移动时,凸台258、260可以构造成接合第一侧翼构件232和第二侧翼构件234并且将第一侧翼构件232和第二侧翼构件234朝向臂108、110的未变形状态向外推动。凸台258、260可以靠近臂的第一端部140并且在组织接触片区域222下方设置,使得凸台可以直接接触侧翼构件232、234。替代性地,凸台158、160可以设置在接触片区域222内,使得凸台258、260构造成使侧翼构件232、234与侧翼构件232、234之间的原生瓣叶组织接合。以下在图20中讨论凸台258、260的其他细节。
68.参照图10至图11,如先前在图9中示意性地示出的处于用于递送的压缩状态或变形状态下的至少一个臂108的可变形框架105现在被描绘成处于用于植入的扩张状态或释放状态。如所示出的,第一支柱236和端部支柱242在臂108的可变形框架105处于未变形状态下具有伸展构型,从而形成最大未变形臂宽度164。如本文中所体现的,铰链部分240可以朝向伸展状态被偏置。附加地或替代性地,侧翼构件232、234可以被向外偏置到扩张状态或释放状态。
69.尽管图4至图8的实施方式中的每一个实施方式描绘了所公开的主题的具有大致均匀宽度的槽145的臂,但是应理解的是,可以提供替代性构型。例如,并且继续参照图10和图11,所公开的主题的臂可以设置为具有槽145,该槽145沿着臂108的长度具有变化的宽度。以这种方式,并且根据所公开的主题的另一方面,可变形框架105可以包括槽145,该槽145沿着臂108的长度在槽的相对的侧向侧部158、159之间靠近最大未变形臂宽度164具有更大的宽度。参照图10至图11的示例性实施方式,最大未变形臂宽度164可以比如通过提供靠近第二端部142设置的翼部延伸部218、220而靠近可变形框架105的第二端部142设置。槽145可以在槽的相应地对准的侧向侧部之间设置有增大的宽度。因此,处于未变形状态下的槽145可以具有定尺寸成接纳至少一个夹持元件116的宽度,如图10至图11中所描绘的。参照图12,夹持元件在由合适的材料制成时,同样可以增大宽度以对应于槽145的增大的宽度。也就是说,并且如图12中所描绘的,夹持元件116可以在靠近夹持元件116的第二端部230处具有更大的宽度。固定装置还可以包括具有类似构型的可以相对于第二臂110移动的第二夹持元件118,以将原生瓣叶捕获在第二夹持元件118与第二臂110之间。此外,尽管未示出,但在需要时,翼部延伸部182的第二端部边缘可以与图8的鸭嘴实施方式类似地成角度。
70.现在参照图13至图14,用于固定心脏瓣膜的瓣叶的系统包括所公开的主题的能够通过具有内径256的导引导管254进行递送的固定装置104,如出于说明而非限制的目的所示出的。为了便于固定装置的递送,最大变形臂侧向截面尺寸165可以小于导引导管254的内径256。为了增大接触片区域,如上面所讨论的,最大未变形臂宽度164因此可以大于导引导管254的内径256。也就是说,可变形框架105在挠曲部分218、220处于变形状态时具有最大变形臂侧向截面尺寸165。此外,如以上所讨论的,最大变形臂侧向截面尺寸165与最大未变形臂宽度164之比为至少1:1.3、比如为至少1:1.5。例如,对于16弗伦奇的导引导管,当本文中所描绘的臂108的可变形框架105通过导引导管递送时,最大变形臂侧向截面尺寸164
可以在大约0.135英寸与0.210英寸之间、比如为大约0.203英寸的最大变形臂侧向截面尺寸165。每个臂可以具有用以将臂从变形状态过渡至未变形状态的多个构型,比如但不限于本文中所公开的各种构型。
71.现在参照图15至图19,出于说明而非限制性目的,还提供了具有包括相应的第一侧翼构件232和第二侧翼构件234的第一挠曲部分和第二挠曲部分的可变形框架的多个替代性构型。例如,在这些实施方式中的每个实施方式中,除其他之外,第一挠曲部分218可以包括沿着可变形框架105的第一侧向侧部纵向地延伸的可变形的第一侧翼构件232,并且第二挠曲部分220可以包括沿着可变形框架105的第二侧向侧部纵向地延伸的可变形的第二侧翼构件234。处于变形状态下的第一侧翼构件232和第二侧翼构件234可以与纵向轴线156大致平行地对准。如本文中进一步体现的,处于未变形状态下的第一侧翼构件232和第二侧翼构件234各自可以至少具有其远离纵向轴线156向外延伸的长度。例如参见图15b、图18b、图19b和图20b。
72.现在参照图15a至图15b的示例性实施方式,臂108的可变形框架105包括从第一侧翼构件232侧向地延伸至第二侧翼构件234的多个支柱235。每个支柱235包括铰链部分240,铰链部分240在臂108的可变形框架105处于变形状态的情况下具有压缩构型,并且在臂108的可变形框架105处于未变形状态的情况下具有伸展构型。例如,并且如本文中所图示的,每个支柱235在变形状态下具有大致v形形状并且在未变形状态下具有大致线性形状。如本文中在图15b中所描绘的,v形形状支柱235在侧翼构件向外伸展时是平面的。还设想了具有各种其他形状的支柱。此外,支柱可以构造成具有朝向扩张构型的弹簧偏置件,并且/或者构造成朝向扩张构型手动地启动。
73.进一步根据所公开的主题,并且出于说明而非限制性目的而参照图16a至图16b中所公开的实施方式,可变形框架105可以包括从第一侧翼构件232朝向第二侧翼构件234侧向地延伸的第一支柱236和从第二侧翼构件234朝向第一支柱236构件侧向地延伸的第二支柱238。如本文中所体现的,第一支柱236和第二支柱238可以处于重叠滑动布置中以用于在变形状态与未变形状态之间相对于彼此的运动。以这种方式,重叠的支柱可以沿着框架的中间部段提供结构稳定性,但仍允许从未变形状态至变形状态的侧向扩张。附加地,并且如先前所讨论的,图16a至图16b中所体现的臂108的可变形框架105还可以包括在可变形框架105的第二端部处从第一侧翼构件232侧向地延伸至第二侧翼构件234的端部支柱242。此外,本文中所公开的端部支柱242包括铰链部分240,铰链部分240在可变形框架105处于变形状态的情况下具有压缩构型,如图16b所示,并且在可变形框架105处于未变形状态的情况下具有伸展构型,如图16a所示。
74.替代性地,并且如图17中所描绘的,在可变形框架105处于未变形状态的情况下,第一支柱236和第二支柱238可以彼此侧向地间隔开。此外,并且代替铰链,第一支柱236和第二支柱238可以构造成至少在变形状态下重叠,这未示出。如图17所示,臂108可以包括在第一侧翼构件232与第二侧翼构件234之间与纵向轴线156大致平行地延伸的中间支承构件244。此外,第一侧翼构件232和第二侧翼构件234各自可以具有靠近可变形框架105的第二端部的渐缩部分246,以进一步提高强度和稳定性以及减小在各种情况下、例如在方形端部的情况下可能出现的不期望的焦点应力。在替代性框架构型的情况下同样可以制造这种渐缩部。
75.根据所公开的主题的具有第一侧翼构件和第二侧翼构件的又一实施方式,并且如图18a至图18c中所图示的,臂108的可变形框架105可以包括从第一侧翼构件232朝向第二侧翼构件234侧向地延伸的多个第一支柱236和从第二侧翼构件234朝向第一支柱236构件侧向地延伸的多个第二支柱238。多个第一支柱236和多个第二支柱238可以构造成在变形状态下彼此互锁,如图18a中所描绘的,并且在未变形状态下彼此释放,如图18b中所描绘的。与图15a至图15b的实施方式一样,多个支柱236、238可以构造成在变形状态下与侧翼构件232、234保持大致平面。多个支柱236、238可以构造成在处于变形状态时沿相同纵向方向延伸或者如图18c中所描绘的在处于变形构型时在平面内和平面外交织。图18c图示了处于变形状态下的第一臂108和第二臂110的横截面端部视图。
76.现在参照图19a至图19b,至少一个臂108可以附加地或替代性地包括在第一侧翼构件232与第二侧翼构件234之间延伸的可扩张网状部分248。可扩张网状部分248可以由下述材料构成:聚合物织造材料,比如聚酯、聚乳酸、plga;编制金属,比如不锈钢、钛合金、钴铬合金;或者超弹性金属合金,比如镍钛诺。图19a描绘了臂的处于变形状态下的可变形框架105,并且图19b描绘了臂108的处于未变形状态下的可变形框架105。
77.如先前所指出的,所公开的主题的臂108的可变形框架105可以朝向未变形状态被偏置以用于在从导引导管、外护套等释放时自动扩张。附加地或替代性地,可变形框架可以由被热处理以通过温度部署的形状记忆材料、比如镍钛诺形成。附加地或替代性地,并且如先前参照图9所指出的,至少一个臂可以由凸台或凸轮等手动地或选定性地从变形状态部署到未变形状态,其中,认识到的是,“未变形状态”是指可变形框架由凸台保持就位的状态。例如,并且现在参照图20,出于说明而非限制性目的,描绘了凸台258、260的其他细节。先前参照图9指出了凸台258、260。在此,在图20中用俯视图描绘了凸台258、260,其中,凸台构造成在位置262处具有最大宽度尺寸。固定装置可以构造成使得臂108、110靠近凸台258、260,其中,凸台设置在侧翼构件232、234之间。当臂从完全闭合位置朝向打开位置移动时,侧翼沿着凸台的表面行进以朝向未变形宽度扩张。以这种方式,臂宽度可以成比例地取决于凸台宽度,使得臂108、110在靠近最大凸台宽度位置262定位时(例如,在臂角度a在大约15度至45度之间时)具有最大未变形臂宽度164。此外,当臂角度低于约10度时,臂宽度接近最大变形臂侧向截面尺寸165以便于装置通过可操纵的导引导管的递送。图20描绘了第一臂108处于各种臂角度a和宽度w1至w3。在w3处,臂角度a相对较大使得侧翼构件232、234位于最大凸台宽度尺寸位置162外侧。在w2处,臂角度在45度与15度之间并且侧翼构件232、234靠近最大凸台宽度尺寸位置162定位。在w1处,臂角度相对较小使得侧翼构件232、234位于最大凸台宽度尺寸位置162内侧。可以设想的是,凸台258、260还可以具有压缩构型以进一步便于减小固定装置在处于递送导管中时的轮廓。
78.对于本文中所公开的每个实施方式,固定装置还可以包括用以使臂在各种限定位置之间移动的组件,例如,而非限制地,并且参照图1,本文中所体现的固定装置包括两个连杆构件或腿部168,每个腿部168具有与臂108、110中的一者以可旋转的方式连结的第一端部和与基部以可旋转的方式连结的第二端部。基部170可以与螺柱176操作性地连接,螺柱176可以操作性地附接至递送轴(为了清楚起见而未示出)的远端端部。在一些实施方式中,螺柱176可以带有螺纹,使得递送轴的远端端部可以通过螺旋式动作附接至螺柱176。此外,螺柱176与递送轴的远端端部之间的连接点可以设置在联接构件174内。然而,递送轴的远
端端部和螺柱176可以通过能够释放以允许固定装置104脱离的任何机构操作性地连接。螺柱可以是轴向地可伸出和可缩回的以使基部移动并且因此使腿部168移动,腿部168使臂108、110在闭合位置、打开位置和倒置位置之间旋转。同样地,螺柱的比如通过锁定机构178的固定化可以将腿部168保持就位并且因此将臂108、110锁定在期望的位置。在通过参引并入本文中的专利和出版物中公开了其他细节。
79.本文中所说明的实施方式适用于使用来自患者的左心房的顺行方法修复心脏瓣膜、比如二尖瓣。在手术之前,可以执行成像和各种测试以预测并诊断患者的个体情况,并且帮助医生选择具有所需参数的固定装置。
80.虽然本文中公开的实施方式利用推动-打开、牵拉-闭合机构以用于打开臂和闭合臂,但应当理解的是,可以使用其他合适的机构,比如牵拉-打开、推动-闭合机构。同样地,可以使用其他致动元件以用于夹持元件的部署。
81.虽然出于说明而非限制的目的,在本文中根据某些优选的实施方式描述了所公开的主题,但是本领域技术人员将认识到的是,可以在不脱离所公开的主题的范围的情况下对所公开的主题进行各种修改和改进。此外,尽管所公开的主题的一个实施方式的各个特征可以在本文中被讨论或在一个实施方式的附图中示出而未在其他实施方式中示出,但是应该容易地明白的是,一个实施方式的各个特征可以与另一实施方式的一个或更多个特征或者来自多个实施方式的特征进行组合。
82.除了所要求保护的具体实施方式之外,所公开的主题还涉及具有所要求保护的从属特征和上面公开的那些特征的任何其他可能组合的其他实施方式。因此,在从属权利要求中提出的和上面公开的特定特征可以以其他可能的组合彼此进行组合。因此,出于说明和描述的目的,已经呈现了对所公开的主题的具体实施方式的前述描述。不意在穷举或将所公开的主题限制为所公开的那些实施方式。
83.对本领域技术人员将明显的是,可以在不脱离所公开的主题的精神或范围的情况下对所公开的主题的方法和系统进行各种修改和变化。因此,所公开的主题意在包括在所附权利要求及其等同物的范围内的修改和变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1