流体管理系统和方法与流程
1.本技术涉及流体管理系统,且更特别地,涉及用于外科手术的流体管理系统和方法。
背景技术:
2.出于可视化目的,手术流体管理系统在内窥镜手术中用于对流体加压并将其递送到手术部位以便扩张和持续冲洗手术部位来保持其没有血液和碎屑。
3.流体管理系统可通过操纵流体供应袋相对于手术部位高度所悬挂的高度、控制包围流体供应袋的压力袖带或压力腔室中的空气压力、或通过泵送流体(通常利用蠕动泵)来对流体加压。重力提供非脉动流体流动,但流体压力控制不佳。类似地,压力袖带或腔室提供非脉动流体流动,但流体压力控制不佳,除非不断地调整袖带或腔室中的压力以考虑离开流体供应袋的流体体积。蠕动泵可以提供良好的压力控制,但流体流动的脉动本性可能损害手术部位处的扩张和可视化。
4.流体管理系统可对流体加温,以便帮助缓解或预防会导致不良后果的术中体温过低。然而,这种系统可能缺乏精确的流体温度控制、在许多手术所需的高流体流率下对流体充分加温的能力、和/或某些外科手术所需的其他能力(例如,手术性宫腔镜检查所需的流体不足监测)。在缺乏具有流体加温能力的流体管理系统的设施中,可在外科手术期间使用之前在加温柜中对流体袋进行预加温。然而,这种加温柜的使用会导致流体热到危险程度,或者如果没有在预加温过程完成后不久使用预加温的流体,则流体已冷却至室温并且可能促成术中体温过低。
5.流体管理系统可包括用于计算供应到手术部位的流体量和自手术部位返回的流体量之间的不足的不足监测系统。目前,流体不足监测是通过从自手术部位返回到流体收集罐、袋或器皿中的流体体积中减去供应到手术部位的流体体积来完成的。通过以下步骤来确定所供应的流体体积:监测流体源袋的重量、对蠕动泵的转数进行计数和/或手动记录在外科手术期间利用的流体袋的数量和体积。通过以下步骤来确定所返回的流体体积:监测罐、袋或器皿的重量和/或手动查看和使用刻度线记录这种罐、袋或器皿中的流体液位。为了使自手术部位返回的流体移动到流体收集罐中,将这些罐与串联管道(tubing)互连且然后连接到手术部位和吸取源。如果流体收集罐在外科手术期间变满,则必须中断手术使得可以替换这种罐。该过程通常涉及暂停吸取、将罐与手术部位和吸取源断连、将串联管道断连、将满罐替换为新罐、将新罐与串联管道互连、将新罐重新连接到手术部位和吸取源以及恢复吸取。由于所收集的血液、组织和受污染的体液所致,满的流体收集罐需要规定的“红袋”处置,除非它们用凝固剂处理过,从而在大多数州允许未规定的“白袋”处置。
6.流体管理系统可连接到内部或外部吸取源以从手术部位汲取流体。由于外部吸取源在手术室环境中常常被设定到高吸取水平,因此可有必要向下调节以便恰当操作某些流体流出调节、不足监测和/或收集功能。可经由手动或电子控制的调节器来完成对外部吸取源的向下调节以提供期望的吸取水平。为了将调节器与生物危害性流体隔离,通常将流体
收集罐、袋或器皿通常放置在调节器和手术部位之间。这些罐、袋或器皿在它们在外科手术期间变满之后必须被移除并替换。
7.在内窥镜外科手术期间,出于程序化和/或可视化目的,可有必要临时增加流体压力和/或流率以保持或增加扩张和/或以保持或增加流体流动。为了提供这种临时增加,用户可手动操作连接到手术镜或器械的流体流入管线的注射器、球状物或类似装置。由于由这些手动方法提供的流体压力和/或流率的任何增加的持续时间受限于注射器、球状物或类似装置中包含的流体体积,因此当用流体重新填充注射器、球状物或类似装置时,流体压力和/或流率的必要增加可能被中断。在其他情况下,用户可通过以下方式来增加流体压力:提升流体供应袋的高度、手动挤压流体供应袋、或手动泵升包围流体供应袋的压力袋或袖带中的压力。替代地,在一些情况下,用户可经由用户界面来增加流体管理系统的设定点流体压力,使得设定点流体压力被设定处于较高的设定点流体压力,且然后当压力或流量不再有必要增加时,用户将设定点流体压力减小到原始的设定点流体压力或其他期望的设定点流体压力。
技术实现要素:
8.一种用于流体管理系统的流体调节器的示例性实施例包括限定第一流体腔室和第二流体腔室的盒。第一流体腔室接收来自流体供应源的流体,并且第二流体腔室接收来自第一流体腔室的流体。盒的至少一部分允许流体管理系统的一个或多个非接触式传感器检测移动通过盒的流体的至少一种特性。
9.一种用于流体管理系统的管道组的示例性实施例包括流体调节器、第一管和第二管。流体调节器包括限定第一流体腔室和第二流体腔室的盒,其中第一流体腔室接收来自流体供应源的流体,并且第二流体腔室接收来自第一流体腔室的流体。第二流体腔室具有用于将第二流体腔室流体地连接到手术器械的出口。第一管将流体调节器流体地连接到流体供应源,并且第二管将流体调节器流体地连接到手术器械。盒的至少一部分允许流体管理系统的一个或多个非接触式传感器检测通过盒的流体的至少一种特性。
10.一种流体管理系统的示例性实施例包括泵、控制系统和流体调节部分。泵将流体从至少一个流体供应容器递送到手术部位。控制系统操作泵,并且包括用户界面和一个或多个非接触式传感器。用户界面允许控制系统和用户之间进行通信,该通信包括将数据输入到控制系统。所述一个或多个非接触式传感器检测被递送到手术部位的流体的一种或多种特性。流体调节部分接收流体调节器,并且该流体调节器连接到泵,使得从泵递送的流体在移动到手术部位之前移动通过流体调节器。
11.一种通过流体管理系统来监测流体流动的示例性方法包括将流体管理系统的控制系统构造成:利用一个或多个流体存在传感器来检测在泵和手术部位之间的一个或多个位置处流体的存在。该方法进一步包括将控制系统构造成:当至少一个流体存在传感器未检测到流体时通过用户界面将通知提供给用户。
12.一种用于流体管理系统的盒组件的示例性实施例包括流体调节器和流体加温盒。流体调节器具有限定第一流体腔室和第二流体腔室的盒,其中该盒的至少一部分允许流体管理系统的一个或多个非接触式传感器检测移动通过盒的流体的至少一种特性。流体加温盒具有流体地连接到流体调节器的第一流体腔室和第二流体腔室的导管,使得第一流体腔
室和第二流体腔室流体地连接。当流体加温盒与流体管理系统一起使用时,流体加温盒允许流体管理系统的加热源对移动通过导管的流体加温。
13.一种用于流体管理系统的盒组件的示例性实施例包括流体调节器和脉冲阻尼盒。流体调节器具有限定第一流体腔室和第二流体腔室的盒,其中第一流体腔室接收来自流体供应源的流体,并且第二流体腔室接收来自第一流体腔室的流体。盒的至少一部分允许流体管理系统的一个或多个非接触式传感器检测移动通过盒的流体的至少一种特性。脉冲阻尼部件包括至少部分地限定导管的至少一个柔性片材,其中导管流体地连接第一流体腔室和第二流体腔室,使得从流体供应源接收在第一流体腔室中的流体移动通过导管并进入第二流体腔室中。柔性侧片材随着移动通过导管的流体的压力波动而膨胀和收缩,以减少流体的脉动。
14.一种流体管理系统的示例性实施例包括至少一个流体供应容器、泵和控制系统。泵将流体从流体供应容器递送到手术部位。控制系统操作泵,并且包括:用户界面,其用于控制系统和用户之间的通信;推注装置(bolus device),其操作性地连接到泵;以及至少一个处理器,其操作性地连接到用户界面、推注装置和泵。用户界面允许用户输入从泵递送的流体的设定点流率和设定点压力中的至少一者。当用户激活推注装置时,推注装置允许用户进行以下各项中的至少一项:将流体的设定点流率增加到临时流率;以及将流体的设定点压力增加到临时压力。当推注剂装置被停用时,处理器引起泵恢复到设定点流率和设定点压力。
15.一种流体管理系统的示例性实施例包括至少一个流体供应容器、泵和控制系统。泵将流体从流体供应容器递送到手术部位。控制系统操作泵,并且包括:用户界面,其用于控制系统和用户之间的通信;临时调整装置,其操作性地连接到泵;以及至少一个处理器,其操作性地连接到用户界面、临时调整装置和泵。用户界面允许用户输入从泵递送的流体的设定点流率和设定点压力中的至少一者。如果用户输入了设定点流率,则当用户激活临时调整装置时,临时调整装置允许用户将流体的设定点流率增加到增加后的临时流率以及将流体的设定点流率减小到减小后的临时流率。如果用户输入了设定点压力,则当用户激活临时调整装置时,临时调整装置还允许用户将流体的设定点压力增加到增加后的临时压力以及将流体的设定点压力减小到减小后的临时压力。当临时调整装置被停用时,处理器引起泵恢复到设定点流率和设定点压力。
16.一种流体管理系统的示例性实施例包括控制系统,该控制系统具有打印机和操作性地连接到打印机的至少一个处理器。处理器被构造成引起打印机在手术期间的任何时间、在手术期间以设定的时间增量和/或在手术结束时打印显示与外科手术有关的信息的一个或多个文档。与外科手术有关的信息包括以下各者中的至少一者:外科手术的日期、外科手术的类型、外科手术的开始时间、外科手术的结束时间、在外科手术期间泵送的流体体积、外科手术的流体不足、在外科手术期间在设定的时间间隔的流体不足、在外科手术期间的平均流体压力、在外科手术期间流体加温的存在、在外科手术期间的平均流体温度、设施信息、医师信息和患者信息。
17.一种用于将至少两种类型的流体供应到手术部位的流体管理系统的示例性实施例包括泵和控制系统。泵被构造成将来自第一流体供应容器的第一流体和来自第二流体供应容器的第二流体递送到手术部位。控制系统包括:用户界面,其用于控制系统和用户之间
的通信;以及至少一个处理器,其操作性地连接到用户界面、泵以及第一流体供应容器和第二流体供应容器。处理器监测第一流体供应容器和第二流体供应容器中的每一者中的流体量以确定是第一流体还是第二流体正被泵递送到手术部位。处理器确定第一流体和第二流体中的一者何时被泵递送到手术部位并且用户期望第一流体和第二流体中的另一者何时在手术部位处。
18.一种将至少两种类型的流体供应到手术部位的方法包括将流体管理系统的控制系统构造成:指导用户将具有第一流体的第一流体供应容器放置在流体管理系统的第一悬挂构件上;以及指导用户将具有第二流体的第二流体供应容器放置在流体管理系统的第二悬挂构件上。该方法进一步包括将控制系统构造成:在从用户接收到将第一流体供应到手术部位的指令之后,指导用户将第一流体供应容器流体地连接到泵;以及激活泵以将第一流体供应到手术部位。该方法还包括将控制系统构造成:在从用户接收到将第二流体类型供应到手术部位的指令之后,停用泵;以及指导用户将第一流体供应容器与泵流体地断连并将第二流体类型流体地连接到泵。该方法进一步包括将控制系统构造成:激活泵以将第二流体类型供应到手术部位。
19.一种流体管理系统的示例性实施例包括至少一个流体供应容器、用于将流体从流体供应容器递送到手术部位处的手术器械的泵以及用于操作泵的控制系统。控制系统包括:用户界面,其用于控制系统和用户之间的通信;以及至少一个处理器,其操作性地连接到用户界面和泵。控制系统可构造成在外科手术期间以第一压力控制模式、第二压力控制模式和第三压力控制模式中的一种操作流体管理系统。第一压力控制模式包括控制系统引起流体管理系统内的流体的第一压力对应于流体管理系统内的如由用户经由用户界面设定的第一期望压力。第二压力控制模式包括控制系统引起手术器械处的流体的第二压力对应于手术器械处的流体的如由用户经由用户界面设定的第二期望压力。第三压力控制模式包括控制系统引起患者体腔处的流体的第三压力对应于体腔处的流体的如由用户经由用户界面设定的第三期望压力。
20.一种启用或禁用用于流体管理系统的加热组件的加热功能的示例性方法包括将控制系统构造成:利用流体管理系统的一个或多个传感器来检测与加热组件对齐的加温盒的存在。该方法进一步包括将控制系统构造成:当传感器检测到加温盒的存在时,启用加热组件的加热功能;以及当传感器未检测到加温盒的存在时,禁用加热功能。
21.一种流体管理系统的示例性实施例包括至少一个流体供应容器、用于将流体从流体供应容器递送到手术部位的泵以及用于操作泵的控制系统。控制系统包括:用户界面,其用于控制系统和用户之间的通信;以及至少一个处理器,其操作性地连接到用户界面和泵。控制系统以第一控制模式操作流体管理系统,该第一控制模式允许用户调整手术部位处的可视化状况和扩张状况中的至少一者。用户通过增加或减小用户界面中的可视化设定来调整可视化状况,并且用户通过增加或减小用户界面中的扩张设定来调整扩张状况。处理器基于如由用户经由用户界面指示的期望的可视化状况和期望的扩张状况对泵的速度作出调整。
22.一种流体管理系统的示例性实施例包括主单元和一个或多个可选模块。主单元具有:泵,其被构造成将流体从至少一个流体供应容器递送到手术部位;以及控制系统,其包括至少一个处理器。所述一个或多个可选模块操作性地连接到控制系统的处理器。所述一
个或多个可选模块包括以下各者中的至少一者:用于监测自手术部位返回的流体量的不足模块(deficit module)、用于调节施加到手术部位的真空压力的抽吸模块、用于从手术部位收集流体的流体收集模块、用于自手术部位返回和收集流体的流体吸取和收集模块、以及流体流动和排空模块。流体管理系统可在多种配置之间进行配置。在第一配置中,这些可选模块中没有一者操作性地连接到主单元的处理器。在第二配置中,这些可选模块中的一者操作性地连接到主单元的处理器。在第三配置中,这些可选模块中的至少两者操作性地连接到主单元的处理器。
23.一种流体管理系统的示例性实施例包括主单元、不足模块和流体收集模块。主单元具有:泵,其用于将流体从至少一个流体供应容器递送到手术部位;以及控制系统,其包括至少一个处理器。不足模块可移除地操作性地耦接到主单元,并且不足模块被构造成监测自手术部位返回的流体量。流体收集模块可移除地操作性地耦接到主单元,并且流体收集模块包括用于接收来自手术部位的流体的收集腔室。
24.一种用于流体管理系统的流体加温盒的示例性实施例包括刚性本体、第一柔性侧片材和第二柔性侧片材。刚性本体具有第一侧和第二侧,并且刚性本体吸收从流体管理系统的加热源提供的ir能量。第一柔性侧片材附接到刚性本体的第一侧,使得第一柔性侧片材和刚性本体的第一侧限定第一流体路径。第二柔性侧片材附接到刚性本体的第二侧,使得第二柔性侧片材和刚性本体的第二侧限定第二流体路径,其中该第二流体路径与第一流体路径流体连通。第一柔性侧片材和第二柔性侧片材对由流体管理系统的加热源提供的ir能量是可透过的,使得ir能量对移动通过第二流体路径的流体加温。
25.一种流体管理系统的示例性实施例包括泵、控制系统、加热组件和流体加温盒。泵将流体从至少一个流体供应容器递送到手术部位。控制系统操作泵,并且包括用于控制系统和用户之间的通信的用户界面,该通信包括将数据输入到控制系统。加热组件具有加热源并接收流体加温盒,使得流体加温盒与加热源对齐。流体加温盒包括:刚性本体,其吸收从加热源提供的ir能量;以及至少一个柔性侧片材,其附接到刚性本体,使得柔性侧片材和刚性本体限定导管。柔性侧片材对由加热源提供的ir能量是可透过的,使得ir能量对移动通过导管的流体加温。流体加温盒流体地连接到泵,使得从泵递送的流体在移动到手术部位之前移动通过导管。控制系统控制由加热源提供的热量的量以引起离开流体加温盒的流体对应于如由用户经由用户界面设定的期望的流体温度。
26.一种用于流体管理系统的盒组件的示例性实施例包括流体调节器和流体加温盒。流体调节器具有限定第一流体腔室和第二流体腔室的盒,其中该盒的至少一部分允许流体管理系统的一个或多个非接触式传感器检测移动通过盒的流体的至少一种特性。流体加温盒具有流体地连接到流体调节器的第一流体腔室和第二流体腔室的导管,使得第一流体腔室和第二流体腔室流体地连接。当流体加温盒与流体管理系统一起使用时,流体加温盒允许流体管理系统的加热源对移动通过导管的流体加温。
27.一种通过流体管理系统监测流体流动的示例性方法包括将流体管理系统的控制系统构造成:利用一个或多个第一流体温度非接触式传感器来检测在流体供应容器和加温盒之间的一个或多个第一位置处的流体的第一温度;以及利用一个或多个第二流体温度非接触式传感器来检测在加温盒和手术部位之间的一个或多个第二位置处的流体的第二温度。该方法进一步包括将控制系统构造成:基于由用户提供的期望温度或流体管理系统的
默认温度中的一者、检测到的第一温度、以及检测到的第二温度来调整由加热源提供给加温盒的ir能量的水平,以调整流体的流体温度。
28.一种利用流体管理系统的控制系统将期望电压提供给灯组件的第一灯和第二灯的示例性方法包括将控制系统构造成:当将期望电压供应到灯组件时使一个或多个继电器开关保持处于第一位置中,使得第一灯和第二灯处于并联配置。该方法进一步包括将控制系统构造成:当供应到灯组件的电压大于预定电压时将所述一个或多个继电器开关移动到第二位置,使得第一灯和第二灯处于串联配置,该预定电压大于或等于期望电压。
29.一种用于流体管理系统的不足盒(deficit cartridge)的示例性实施例包括盒、第一阀、第二阀、至少一个入口开口和真空开口。盒限定腔室,该腔室包括流体地连接的第一区段、第二区段和第三区段。第一阀定位在第一区段和第二区段之间,并且第一阀可在打开位置和闭合位置之间移动。第二阀定位在第二区段和第三区段之间,并且第二阀可在打开位置和闭合位置之间移动。入口开口与第一区段流体连通以用于接收来自手术部位的流体,并且真空开口与第三区段流体连通以用于接收真空压力,该真空压力在腔室中引起负压力并通过入口开口从手术部位将流体汲取进入第一区段中。
30.一种用于流体管理系统的不足盒的示例性实施例包括限定腔室的盒、至少一个入口开口和真空开口。入口开口与腔室流体连通以用于接收来自手术部位的流体,并且真空开口与腔室流体连通以用于接收真空压力。盒的至少一部分允许流体管理系统的一个或多个流体传感器在不接触流体的情况下检测移动通过腔室的流体量。
31.一种用于流体管理系统的一次性管道组的示例性实施例包括用于流体地连接到手术部位的至少一个流体返回管、流体地连接到流体返回管的不足盒以及流体地连接到不足盒的排空管。不足盒包括限定腔室的盒、第一阀、第二阀、至少一个入口开口和真空开口。盒限定腔室,该腔室包括流体地连接的第一区段、第二区段和第三区段。第一阀定位在第一区段和第二区段之间并且可在打开位置和闭合位置之间移动,且第二阀定位在第二区段和第三区段之间并且可在打开位置和闭合位置之间移动。入口开口与腔室的第一区段和流体返回管流体连通,并且真空开口与腔室的第三区段流体连通。排空管流体地连接到真空开口并且被构造成流体地连接到吸取源,使得由吸取源施加的真空压力在腔室中引起负压力并且来自手术部位的流体通过返回管和流体入口进入腔室的第一区段。
32.一种流体管理系统的示例性实施例包括不足模块和不足盒。不足模块包括至少一个流体存在传感器。不足盒被构造成可移除地连接到不足模块,并且包括盒、第一阀、第二阀、至少一个入口开口和真空开口。盒限定腔室,该腔室包括流体地连接的第一区段、第二区段和第三区段。第一阀定位在第一区段和第二区段之间并且可在打开位置和闭合位置之间移动,且第二阀定位在第二区段和第三区段之间并且可在打开位置和闭合位置之间移动。入口开口与第一区段流体连通以用于接收来自手术部位的流体,并且真空开口与第三区段流体连通以用于接收来自吸取源的真空压力。当一次性不足盒连接到不足模块时,第一流体存在传感器与第二区段的第一区域对齐。
33.一种流体管理系统的示例性实施例包括泵、控制系统和一次性管道组。泵将流体从至少一个流体供应容器递送到手术部位。控制系统包括至少一个处理器和一个或多个流体传感器。一次性管道组可移除地连接到流体管理系统,并且包括用于流体地连接到手术部位的至少一个流体返回管、流体地连接到吸取源的排空管、以及流体地连接到流体返回
管和排空管的不足盒。不足盒包括限定腔室的盒,该腔室与控制系统的至少一个流体传感器对齐。不足盒还包括与流体返回管流体连通的至少一个入口开口、以及与排空管流体连通的真空开口。控制系统的处理器被构造成至少基于从与不足盒的腔室对齐的所述至少一个流体传感器获得的数据来确定提供给手术部位的流体和自手术部位通过不足盒返回的流体之间的流体不足。
34.一种确定在外科手术期间移动通过流体管理系统的不足盒的流体量的示例性方法包括将流体管理系统的控制系统构造成:检测在不足盒的第二区段内的第一位置处流体的存在、以及闭合不足盒的第一阀以防止流体从不足盒的第一区段移动到不足盒的第二区段中。该方法进一步包括将控制系统构造成:基于在第一位置处流体的检测到的存在来确定第二区段中的流体体积、以及在检测到在第一位置处流体的存在之后打开不足盒的第二阀以允许流体从不足盒的第二区段移动到不足盒的第三区段中。
35.一种用于将流体从手术部位移动到设施的引流管(drain)的示例性流体管理系统包括排空模块、控制系统和不足盒。排空模块具有至少一个流体存在传感器。控制系统具有操作性地连接到排空模块的第一流体存在传感器的至少一个处理器。不足盒被构造成可移除地连接到排空模块,并且包括盒、第一阀、第二阀、至少一个入口开口和真空开口。盒限定腔室,该腔室具有流体地连接的第一区段、第二区段和第三区段。第一阀定位在第一区段和第二区段之间,并且可通过排空模块在打开位置和闭合位置之间移动。第二阀定位在第二区段和第三区段之间,并且可通过排空模块在打开位置和闭合位置之间移动。入口开口与第一区段流体连通以用于接收来自手术部位的流体,并且真空开口与第三区段流体连通以用于接收来自吸取源的真空压力,该真空压力引起流体从手术部位移动到不足盒中并从不足盒中出来而进入设施的引流管中。当不足盒连接到排空模块时,排空模块的第一流体存在传感器与第二区段的第一区域对齐,并且处理器至少基于从排空模块的第一流体存在传感器接收到的数据来确定移动到设施的引流管中的流体体积。
36.一种流体管理系统的示例性实施例包括泵、控制系统和不足盒。泵将来自第一流体供应容器的第一流体和来自第二流体供应容器的第二流体递送到手术部位。控制系统具有至少一个处理器和一个或多个流体传感器。不足盒与控制系统的流体传感器对齐并且定位成使得吸取源从手术部位将第一流体和第二流体汲取进入和汲取出不足盒。控制系统的处理器至少基于从所述一个或多个流体传感器获得的数据来确定第一流体的第一流体不足和第二流体的第二流体不足,所述一个或多个流体传感器监测移动通过不足盒的第一流体和第二流体。
37.一种利用流体管理系统来监测在外科手术期间第一流体的第一流体不足和第二流体的第二流体不足的示例性方法包括将流体管理系统的控制系统构造成:确定泵将第一流体还是第二流体泵送到手术部位。该方法进一步包括将控制系统构造成:检测移动到手术部位的第一流体的第一供应体积、检测在离开手术部位之后移动通过流体管理系统的不足盒的第一流体的第一流体返回体积、以及基于检测到的第一供应体积和检测到的第一返回体积来计算第一流体不足。该方法进一步包括将控制系统构造成:检测移动到手术部位的第二流体的第二供应体积、检测在离开手术部位之后移动通过不足盒的第二流体的第二流体返回体积以及基于检测到的第二供应体积和检测到的第二返回体积来计算第二流体不足。
38.一种流体管理系统的示例性实施例包括泵和控制系统。泵将至少一种流体从流体容器递送到手术部位。控制系统包括:打印机;以及至少一个处理器,其操作性地连接到打印机、被构造成计算针对至少一种流体类型的流体不足。处理器被构造成引起打印机打印显示来自流体容器的所述至少一种流体的所计算的流体不足的一个或多个文档。
39.一种流体管理系统的示例性实施例包括高架结构和控制系统。高架结构具有能够接收流体供应容器或流体返回容器的两个或更多个悬挂构件。控制系统包括:用户界面,其用于控制系统和用户之间的通信;以及至少一个处理器,其操作性地连接到用户界面和所述两个或更多个悬挂构件。用户界面指导用户悬挂流体供应容器,并且处理器监测所述两个或更多个悬挂构件上的第一重量变化并将第一悬挂构件指定为流体供应悬挂构件。控制系统经由用户界面来指导用户悬挂流体返回容器,并且处理器监测所述两个或更多个悬挂构件上的第二重量变化并将第二悬挂构件指定为流体返回悬挂构件。
40.一种确定由流体管理系统提供给手术部位的供应流体量和自手术部位返回到流体管理系统的返回流体量之间的流体不足的示例性方法包括将流体管理系统的控制系统构造成:基于用户将流体供应容器悬挂在第一悬挂构件和第二悬挂构件中的一者上而将流体管理系统的第一悬挂构件和第二悬挂构件中的一者指定为流体供应悬挂构件。该方法进一步包括将控制系统构造成:基于用户将流体返回容器悬挂在第一悬挂构件和第二悬挂构件中的另一者上而将第一悬挂构件和第二悬挂构件中的另一者指定为流体返回悬挂构件。该方法进一步包括将控制系统构造成:监测提供给供应悬挂构件的第一力以及基于所监测的第一力来确定提供给手术部位的供应流体量。该方法进一步包括将控制系统构造成:监测提供给返回悬挂构件的第二力以及基于所监测的第二力来确定自手术部位返回的返回流体量。该方法还包括将控制系统构造成:基于所确定的供应流体量和所确定的返回流体量来计算流体不足。
41.一种压力调节器的示例性实施例包括第一腔室、第二腔室、第三腔室和柔性膜。第一腔室具有用于流体地连接到外部压力源的入口开口,第二腔室具有用于将调节后的压力供应到调节源的出口开口,并且第三腔室具有用于连接到压力源的压力开口。柔性膜将第三腔室与第一腔室和第二腔室两者流体地隔离,并且柔性膜可通过压力源在以下两者之间移动:第一位置,其中柔性膜将第一腔室与第二腔室流体地隔离;以及第二位置,其中第一腔室和第二腔室流体地连接。
42.一种压力调节器的示例性实施例包括第一腔室、第二腔室、第三腔室、第四腔室和柔性膜。第一腔室具有用于流体地连接到外部压力源的入口开口,并且第二腔室具有用于将调节后的压力供应到调节源的出口开口。第三腔室具有用于连接到压力源的压力开口,并且第四腔室具有用于连接到压力传感器的感测开口,该压力传感器感测第四腔室中的压力。柔性膜将第三腔室和第四腔室与第一腔室和第二腔室两者流体地隔离。柔性膜可通过施加到第一腔室的真空压力移动,使得第三腔室和第四腔室流体地连接,并且柔性膜可通过由压力源施加的压力移动,使得第一腔室和第二腔室流体地连接。
43.一种流体管理系统的示例性实施例包括泵和一次性压力调节器。泵将流体从流体供应容器递送到手术部位。一次性压力调节器定位在手术部位和外部真空源之间。一次性压力调节器调节由外部真空源提供给手术部位的真空压力,并且来自手术部位的流体穿过压力调节器,之后通过流体管理系统被排空。
44.一种流体管理系统的示例性实施例包括泵和抽吸模块组件。泵将流体从流体供应容器递送到手术部位。抽吸模块组件连接到外部真空源并定位在手术部位和真空源之间。抽吸模块组件包括抽吸模块和压力调节器。抽吸模块具有压力源和压力传感器。压力调节器可移除地连接到抽吸模块,并且包括第一腔室、第二腔室、第三腔室和柔性膜。第一腔室具有用于流体地连接到外部真空源的入口开口,第二腔室具有用于将调节后的压力供应到调节源的出口开口,并且第三腔室具有用于连接到抽吸模块的压力源和压力传感器的一个或多个开口。柔性膜将第三腔室与第一腔室和第二腔室两者流体地隔离,并且柔性膜可通过压力源在以下两者之间移动:第一位置,其中柔性膜将第一腔室与第二腔室流体地隔离;以及第二位置,其中第一腔室和第二腔室流体地连接。
45.一种流体管理系统的示例性实施例包括泵和抽吸模块组件。泵将流体从流体供应容器递送到手术部位。抽吸模块组件连接到外部真空源并定位在手术部位和真空源之间。抽吸模块组件包括抽吸模块和压力调节器。抽吸模块具有压力源和压力传感器。压力调节器可移除地连接到抽吸模块,并且包括第一腔室、第二腔室、第三腔室、第四腔室和柔性膜。第一腔室具有用于流体地连接到外部真空源的入口开口,并且第二腔室具有用于将调节后的压力供应到调节源的出口开口。第三腔室具有用于连接到抽吸模块的压力源的压力开口,并且第四腔室具有用于连接到抽吸模块的压力传感器的感测开口。柔性膜将第三腔室和第四腔室与第一腔室和第二腔室两者流体地隔离。柔性膜可通过外部真空源移动,使得第三腔室和第四腔室流体地连接,并且柔性膜可通过由压力源施加的压力移动,使得第一腔室和第二腔室得以流体地连接。
46.一种利用流体管理系统来调节供应到手术部位的真空压力的示例性方法包括将流体管理系统的控制系统构造成:将来自压力源的第一真空压力提供给流体管理系统的压力调节器,以将设置在压力调节器内的柔性膜从第一位置移动到第二位置,在该第一位置中,柔性膜将外部真空源与手术部位流体地隔离,并且在该第二位置中,真空源和手术部位流体地连接。柔性膜到第二位置的移动引起供应到手术部位的真空压力从手术部位将流体汲取通过一次性压力调节器,之后通过流体管理系统而排空流体。
47.一种利用流体管理系统来调节供应到手术部位的真空压力的示例性方法包括将流体管理系统的控制系统构造成:将来自压力源的第一真空压力提供给流体管理系统的压力调节器,以将设置在压力调节器内的柔性膜从第一位置移动到第二位置,在该第一位置中,柔性膜将外部真空源与手术部位流体地隔离,并且在该第二位置中,真空源和手术部位流体地连接。柔性膜到第二位置的移动引起供应到手术部位的真空压力从手术部位将流体汲取进入设置在手术部位和压力调节器之间的流体收集罐中。
附图说明
48.图1图示了用于手术室环境的流体管理系统的示例性实施例;图2图示了图1的流体管理系统的主单元的示例性实施例;图3图示了图2的主单元的加热器和流体调节器组件的示例性实施例;图4图示了用于插入到图3的加热器和流体调节器组件中的示例性盒组件;图5图示了图4的盒组件的彼此断连的示例性流体调节器和流体加温盒;图6图示了通过图4的盒组件的示例性流体路径;
图7图示了具有图4的盒组件的图3的加热器组件的ir灯子组件的分解图;图7a图示了用于跨接电路(交叉电路,crossover circuit)的阈值检测器的示例性实施例;图7b图示了用于与图7a的跨接电路交互的继电器组的示例性实施例,其中该继电器组的开关处于第一位置中;图7c图示了图7b的继电器组,其中继电器组的开关处于第二位置中;图8图示了用于插入到流体管理系统的流体调节组件中的流体调节器的另一示例性实施例;图9图示了图5的流体调节器和图3的流体调节组件之间的示例性对齐;图10图示了用于图4的盒组件的流体调节器的示例性实施例的截面图;图11图示了图10的流体调节器,其示出了流体调节器的与图3的流体调节组件的传感器对齐的位置;图12图示了图10的流体调节器的透视图;图13图示了图10的流体调节器的分解透视图;图14图示了图4的盒组件的示例性流体加温盒的透视图;图15图示了图14的流体加温盒的分解透视图;图16图示了当流体在低压下移动通过图14的流体加温盒时该流体加温盒的前视图;图17图示了当流体在高压下移动通过图14的流体加温盒时该流体加温盒的前视图;图18图示了当流体在高压下移动通过图14的流体加温盒时该流体加温盒的截面前视图;图19图示了用于图1的流体管理系统的主单元的示例性实施例,其中该主单元包括用以将空气抽取通过主单元的加热器组件以达到冷却目的开口以及用以将所得暖空气排放到流体供应袋或容器中的一者或多者上或附近以便对流体进行预加温的另一个开口,这些流体供应袋或容器从流体管理系统悬置;图20图示了用于图1的流体管理系统的不足模块和不足盒的示例性实施例的透视图,其中不足盒插入于不足模块中;图21图示了图20的不足模块和不足盒的前视图;图22图示了图20的不足模块和不足盒的右侧透视图,其中不足盒从不足模块中被移除;图23图示了图20的不足模块和不足盒的左侧透视图,其中不足盒从不足模块中被移除;图24图示了图20的不足盒的后视图;图25图示了图20的不足盒的后视图;图26图示了图20的不足盒的侧视图,其中阀和端口盖被移除;图27图示了与图20的不足模块的可移动歧管对齐的图20的不足盒,其中,该可移动歧管相对于不足盒处于打开位置中;图28图示了与图20的不足模块的可移动歧管对齐的图20的不足盒,其中该可移动
歧管相对于不足盒处于闭合位置中,使得在不足盒和不足模块之间进行连接;图28a-图28c图示了图20的不足盒的端口和图20的不足模块的可移动歧管的连接器之间的示例性连接;图29图示了图20的不足盒的分解透视图;图30图示了与图20的不足模块的非接触式流体存在传感器对齐的图20的不足盒的前视图;图31图示了与图20的不足模块的非接触式流体存在传感器对齐的图20的不足盒的透视图;图32图示了图20的不足盒的侧视图;图33图示了当流体管理系统的不足监测特征处于填充/测量周期时图20的不足盒的侧视图;图34图示了当流体管理系统的不足监测特征处于填充/排空周期时图20的不足盒的侧视图;图35图示了图20的不足模块的截面顶视图;图36图示了图20的不足模块的分解透视图;图37图示了用于图20的不足模块的示例性不足泵歧管组件的透视图;图38图示了图20的不足模块的示例性不足盒接收组件的分解透视图,该不足盒接收组件用于接收图20的不足盒;图39图示了图20的不足模块和图38的不足盒接收组件的示例性歧管连接组件的透视图;图40图示了图20的不足模块的左侧透视图;图41图示了图20的不足模块的右侧透视图;图42图示了图20的不足模块的顶视图;图43图示了图20的不足模块沿着图42中所示的线a-a截取的截面图;图44图示了图43中所示的不足模块的局部视图,其示出了用于连接图20中所示的不足盒的示例性歧管连接组件,其中该歧管连接组件相对于不足盒处于脱离位置中;图45图示了图44中所示的示例性接合机构,其中歧管连接组件相对于不足盒处于脱离位置中;图46图示了图20的不足模块的顶视图;图47图示了图20的不足模块沿着图46中所示的线b-b截取的截面图;图48图示了图43中所示的不足模块的局部视图,其示出了图44的示例性歧管连接组件,其中该歧管连接组件相对于不足盒处于接合和连接位置中;图49图示了图44中所示的示例性接合机构,其中歧管连接组件相对于不足盒处于接合和连接位置中;图50图示了图1中所示的流体管理系统的另一示例性实施例;图51图示了用于图50的流体管理系统的流体流动监测和排空模块的示例性实施例;图52图示了用于图1的流体管理系统的抽吸模块和压力调节器的示例性实施例的透视图,其中压力调节器插入于抽吸模块中;
图53图示了图52中所示的压力调节器的示例性实施例的示意图;图54图示了图52中所示的压力调节器的另一示例性实施例的示意图;图55图示了图54中所示的压力调节器的示意图,其示出了压力调节器的串联设置的阀;图56图示了图54中所示的压力调节器的示例性实施例的后透视图;图57图示了图56中所示的压力调节器的前透视图;图58图示了图56中所示的压力调节器的分解透视图;图59图示了图56中所示的压力调节器的顶视图;图60图示了图56中所示的压力调节器的后视图;图61图示了图56中所示的压力调节器的底视图;图62图示了图56中所示的压力调节器的侧视图;图63图示了图56中所示的压力调节器沿着图61中所示的线c-c截取的截面图;图64图示了图56中所示的压力调节器和用于图52中所示的抽吸模块的示例性接收机构之间的示例性连接的透视图;图65图示了图54中所示的压力调节器的另一示例性实施例的透视图;图66图示了图65中所示的压力调节器的分解透视图;图67图示了图65中所示的压力调节器的局部透视图;图68图示了图65中所示的压力调节器的顶视图;图69图示了图65中所示的压力调节器沿着图68中所示的线d-d截取的截面图;图70图示了图65中所示的压力调节器沿着图68中所示的线e-e截取的截面图;图71图示了图65中所示的压力调节器沿着图68中所示的线f-f截取的截面图;图72图示了图65中所示的压力调节器和用于图52中所示的抽吸模块的示例性接收机构之间的示例性连接的顶部截面图;图73图示了图72中所示的压力调节器和接收机构之间的示例性连接的局部视图,其示出了压力调节器的端口和抽吸模块的端口之间的连接;图74图示了图52中所示的抽吸模块的示例性实施例的侧视截面图;图75图示了图74中所示的抽吸模块的后透视图;图76图示了由图1的流体管理系统经由用户界面向用户作出的关于要执行的手术类型的示例性提示;图77图示了由图1的流体管理系统经由用户界面向用户作出的关于要执行的手术类型的另一示例性提示;图78图示了由图1的流体管理系统经由用户界面向用户作出的关于将在手术期间将使用的一定数量的流体类型的示例性提示;图79图示了由图1的流体管理系统经由用户界面向用户作出的关于将在手术期间将使用的一定数量的流体类型的另一示例性提示;图80图示了由图1的流体管理系统经由用户界面向用户作出的关于将在手术期间将使用的一定数量的流体类型的另一示例性提示;图81图示了当流体管理系统被设定到压力控制模式时在流体管理系统的用户界面上的手术运行屏幕的示例性实施例;
图81a图示了计算补偿高度以便计算手术镜或器械处的压力的装置;图82图示了在流体管理系统的用户界面上的手术设置屏幕的示例性实施例;图83图示了当流体管理系统被设定到“手术部位”控制模式时在流体管理系统的用户界面上的手术运行屏幕的示例性实施例;图84图示了以图83中所示的手术部位控制模式操作的流体管理系统的流程图;图85图示了在流体管理系统的用户界面上的手术设置屏幕的示例性实施例,其包括操作推注装置;图86图示了图85的手术设置屏幕;图87图示了图85的手术设置屏幕;图88图示了在流体管理系统的用户界面上的手术设置屏幕的示例性实施例,其包括操作流体管理系统的打印机;图89图示了在流体管理系统的用户界面上的手术设置屏幕的示例性实施例,其包括用于在流体供应容器变得被耗尽时通知用户的警报设置,其中系统处于定时设置;图90图示了图89的手术设置屏幕,其中,系统处于百分比设置;图91图示了图89的手术设置屏幕,其中,系统处于体积设置;图92图示了用于医师办公室环境的流体管理系统的示例性实施例,其中流体袋附接到流体管理系统的悬挂构件;以及图93图示了图92的流体管理系统,其中流体供应袋和流体返回罐附接到流体管理系统的悬挂构件。
具体实施方式
49.具体实施方式描述了本发明的示例性实施例,并且不旨在以任何方式限制权利要求的范围。实际上,本发明比示例性实施例更广泛且不受示例性实施例的限制,并且权利要求中使用的术语具有其完整的普通含义,除非在申请中另有注释。一个示例性实施例的特征和部件可结合到其他示例性实施例中。本技术的范围内的发明可包括附加特征,或者可具有比示例性实施例中所示的特征更少的特征。
50.如本文中所描述的,当一个或多个部件被描述为连接、联结、附贴、耦接、附接或以其他方式互连时,这种互连可以是部件之间的直接互连,或者可以是间接的,诸如通过使用一个或多个中间部件。同样如本文中所描述的,对“构件”、“部件”或“部分”的引用不应限于单个结构构件、部件或元件,而是可以包括部件、构件或元件的组件。同样如本文中所描述的,术语“基本上”和“约”被定义为至少接近(并包括)给定值或状态(优选地在10%以内,更优选地在1%以内,且最优选地在0.1%以内)。
51.在内窥镜外科手术中,稳定的扩张和清晰的可见性对于程序化功效和效率很重要。流体管理系统用于将流体提供给手术部位,使得外科医生在执行外科手术时具有期望的扩张和可视化。流体管理系统还可以用于从手术部位移除流体。本文中所描述的流体管理系统的各种实施例涉及模块化系统,这些模块化系统包括可与单用途或多用途的管道组结合使用的软件控制的机电装置或模块。本文中所描述的模块化手术流体管理系统是完全可配置的,以基于例如正执行的外科手术的类型和手术环境来满足用户需求。本文中所描述的流体管理系统的示例性功能包括流体加压、流体加温、流体不足监测、吸取、吸取调节、
流体收集和/或流体排空到设施的废物处置系统中。流体管理系统可以基于外科科目(例如,妇科、泌尿科和/或骨科手术)和环境(例如,手术室或医师办公室)以及基于用户和/或设施的其他需求和/或偏好来配置。流体管理系统可能够进行集成式吸取和流体收集,和/或可与第三方吸取和流体收集装置以及在使用流体管理系统的情况下设施的中央吸取系统兼容。
52.参考图1,示出了用于手术室环境(其中执行妇科、泌尿科和骨科手术)的流体管理系统100的示例性实施例。系统100包括高架结构101、主单元102、不足模块104、流体收集模块106和流体排空模块108。系统100还可包括抽吸模块5201(图52)和/或流体流动和排空模块5101(图51)。在一些实施例中,高架结构101包括轮子103,使得系统100可以移动到手术室内的期望位置或移动到存储区域。系统100可为模块化的,使得上文所描述的系统100可以如用户所期望的那样来构造。
53.主单元102可具有控制系统,该控制系统包括一个或多个处理器(未示出)以用于控制所述系统100的各种模块和部件或其他设施设备和/或与其通信。各种模块和部件还可具有一个或多个处理器(未示出)以用于执行指定功能和/或与主单元102的控制系统或其他设施设备通信。(一个或多个)处理器可执行存储在系统100的存储器(未示出)中的指令(例如,软件代码)和/或执行由用户输入到系统中的指令。在一些实施例中,控制系统可具有用于连接到系统100的远程定位的部件或模块或者其他设施设备的“蓝牙”力以及用于连接到互联网的“wi-fi”能力。控制系统可包括触摸屏图形用户界面110以用于从用户接收一个或多个输入并显示系统100的信息(例如,关于流体压力、流体体积、流体温度、流体不足等的信息)。
54.参考图1至图3,主单元102还可包括用于流体加压的泵212(例如,蠕动泵)、用于流体加温的加热器组件314、用于感测一种或多种流体特性(例如,流体存在、温度等)的流体调节组件315、用于悬挂流体供应和/或返回容器(例如,袋、罐、器皿等)的悬挂构件116(例如,钩)、以及用于在外科手术期间或之后打印出相关手术信息(例如,关于手术类型、手术开始时间、手术结束时间、总流体体积、平均流体压力、总流体不足、根据流体类型的不足、平均流体温度等的信息)的打印机218。控制系统的处理器可以与以下各者通信:泵212、加热器组件314、流体调节组件315、压力传感器949(图9)、螺线管阀951(图9)、悬挂构件116、打印机218、不足模块104、流体收集模块106、流体排空模块108、抽吸模块5201(图52)、流体流动和排空模块5101(图51)和/或系统100的任何其他部件。
55.泵212可流体地连接到悬挂在悬挂构件116上的(一个或多个)流体容器,使得泵可以将流体泵送通过管道组到达在手术部位处的手术镜或器械(例如,宫腔镜、膀胱镜、输尿管镜、肾镜等)。管道组可包括流体调节器(例如,图4中所示并在本技术中描述的流体调节器420),该流体调节器与一个或多个非接触式传感器(例如,流体调节组件315的非接触式传感器或系统100中的任何其他非接触式传感器)结合工作,使得系统100可以监测移动到手术部位的流体的一种或多种特性。管道组还可包括流体加温盒(例如,图4中所示并在本技术中描述的流体加温盒422),该流体加温盒与加热器组件314结合工作,使得系统100可以对移动到手术部位的流体加温。
56.吸取源从手术部位将流体汲取通过管道组,并进入收集模块106的收集容器中、进入第三方流体收集系统中、抑或进入其中系统100正被使用的设施的废物处置系统中。在某
些实施例中,吸取源是真空泵,其是构成主单元102或流体收集模块106的组成部分。在一些实施例中,流体收集模块还包括泵和一个或多个过滤器,使得流体收集模块可以排空和过滤手术烟雾以消除电外科手术的潜在危险副产品。
57.参考图1,流体收集模块106可为独立移动的,并且可移除地耦接到高架结构101,使得模块106可以从高架结构101移除并且运输到废物处置区域或室以便处置所收集的流体。在一些实施例中,收集模块106的收集容器可包括一次性衬垫,在流体已从吸取和收集模块106排空并进入设施的废物处置系统中之后,这些一次性衬垫可以容易地替换。在一些实施例中,吸取源在系统100外部并将流体汲取到收集模块106的收集容器、第三方流体收集系统、抑或设施的废物处置系统。在流体被直接汲取入设施的废物处置系统中的实施例中,收集模块106可在使用期间被绕过或从系统100移除(例如,如图50中所示)。流体收集模块106可包括处理器,该处理器与主单元102、不足模块104、抽吸模块5201(图52)、系统100的其他部件和/或其他设施设备通信。在一些实施例中,出于流体流出和/或不足监测目的,流体收集模块106可包括重量测量机构(例如,秤),该重量测量机构允许流体管理系统100确定自手术部位返回的流体体积。
58.在流体移动到收集模块106、第三方流体收集系统或设施的废物处置系统中之前,流体可移动通过单用途或多用途的不足盒(例如,图25中所示并在本技术中描述的不足盒2010),使得系统100可以计算和监测提供给手术部位的流体和自手术部位返回的流体之间的流体不足。不足盒可与不足模块104(或图51中所示并在本技术中描述的流体流动和排空模块5101)和主单元102结合工作,以允许系统100计算和监测流体不足。
59.在某些实施例中,系统100包括抽吸模块(例如,图52中所示并在本技术中描述的抽吸模块5201)以及流体地连接到管道组和吸取源的单用途或多用途的压力调节器(例如,图52-73中所示并在本技术中描述的压力调节器5205)。压力调节器和抽吸模块可彼此结合以及与主单元102结合工作以调节由吸取源提供给手术部位的真空压力,从而从手术部位汲取流体。
60.图4至图6图示了用于系统100的单用途或多用途的一次性管道组的盒组件419的示例性实施例,其中盒组件419包括流体调节器420和流体加温盒422。流体调节器420被构造成连接到加温盒422以形成盒组件419(如图4中所示)。例如,参考图5,流体调节器420可具有一个或多个连接构件421,所述一个或多个连接构件被构造成连接到流体加温盒422的一个或多个连接构件423。流体调节器420的连接构件421和流体加温盒422的连接构件423可通过例如卡扣配合连接、摩擦配合连接等而连接。在其他实施例中,流体调节器420和流体加温盒422可通过胶合、超声波焊接或将流体调节器和流体加温盒联结的任何其他合适的手段而连接。在某些实施例中,盒组件419是具有组合的流体调节和流体加温功能的单个、完全集成式部件。在这些实施例中,盒组件419的单个、完全集成式部件可以是例如单个注射模制的部件。在某些实施例中,盒组件419被提供为单用途或多用途的管道组的完全组装部件。在一些实施例中,流体调节器420被提供为单用途或多用途的管道组(例如,包括图8中所示的流体调节器420和管841组件)的完全组装部件,并且加温盒422被提供为可以附接到流体调节器420(如果需要)的附件部件。在这种实施例中,用户可通过从流体调节器420移除管841(图8)并将加温盒422连接到流体调节器420来将管道组构造成用于流体加温。
61.在某些实施例中,主单元102可以感测是流体调节器420已单独(例如,没有加温盒422)插入到系统100中还是盒组件419(其包括流体调节器420和加温盒422)已插入到系统中。例如,主单元102可包括一个或多个传感器(例如,接近传感器、机械传感器、光学传感器、激光传感器等),所述一个或多个传感器可以检测是流体调节器420单独地还是盒组件419插入到系统100中。然后,系统100的控制系统可以在加温盒422插入到系统100中时启用系统100的流体加温功能(例如,图3中所示的加热器组件314),并且在加温盒422未插入到系统100中时禁用加温功能。
62.参考图6,在系统100的使用期间,流体可被泵送通过管道组的第一管624并进入流体调节器420的入口端口625中。然后,流体沿着第一流动路径626流过流体调节器的入口腔室1053(图10),移动通过流体调节器420的出口端口527(图5),并通过流体加温盒422的入口开口528(图5)。然后,流体沿着流体路径629沿着加温盒422的第一侧1671(图16-图18)移动,移动通过连接器或管530,并沿着路径631进入流体加温盒422的第二侧1670(图16-图18)中。随后,流体离开出口开口532(图5)并且移动通过流体调节器420的出口腔室1054(图10)的入口端口533(图5),其中流体沿着路径636移动,使得流体离开流体调节器422的出口634并且移动通过一次性管道组的管635到达手术部位处的手术器械。连接器或管530被示为具有u形状,但连接器或管可以采取引起加温盒422的第一侧和第二侧流体地连接的任何合适的形式。虽然流体加温盒的第一侧和第二侧被示为通过连接器或管530流体地连接,但是应理解,第一侧和第二侧可以在不需要连接器或管530的情况下流体地连接。例如,加温盒422可以具有流体地连接第一侧和第二侧的通道。
63.在所图示的实施例中,流体在相对于流体路径629的出口而较低的位置处在连接器或管530的入口处通过加温盒422的入口开口528(图5)进入流体路径629,并且流体在相对于加温盒422的出口开口532(图5)而较低的位置处在连接器或管530的出口处进入流体路径631。流体路径629、631中的每一者的进入低、离开高配置通过减少涡电流和滞流区域来促进更均匀的、受控加温。虽然流体被示为采取通过加温盒422的流体路径629、631,但是应理解,流体可以采取通过加温盒422的任何合适的路径。
64.将盒组件419插入到系统100的主单元102中使流体调节器420与流体调节组件315(图3)对齐并使流体加温盒422与加热器组件314(图3)对齐。流体调节器420可具有手柄442,该手柄允许用户容易地将盒组件419插入到主单元102中。
65.参考图7,加热器组件314(图3)可包括ir灯组件737,该ir灯组件用于对沿着加温盒422的流体路径629、631(图6)移动的流体加温。ir灯组件737可包括:支撑结构738;具有ir反射涂层的一个或多个长形ir灯739,所述一个或多个长形ir灯设置在加温盒422的每一侧上;以及抛物面反射器740,其设置在加温盒422的每一侧上,使得抛物面反射器740将ir能量聚焦在流体路径上。然而,加热器组件314可利用其他类型的ir灯,诸如灯泡、环形物、面板、圆形模块、或能够对流体(该流体移动通过加温盒422或能够使流体暴露于ir灯的任何其他盒、管或器皿)加温的任何其他合适的形式。
66.参考图8,在一些实施例中,在手术期间流体加温可能是不期望的或不必要的。在流体加温盒422是不必要的这些实施例中,连接器或管841用于连接流体调节器420的入口腔室1053(图10)和出口腔室1054(图10)。虽然入口腔室和出口腔室被示为通过连接器或管841流体地连接,但是应理解,入口腔室和出口腔室可以在不需要连接器或管841的情况下
流体地连接。例如,流体调节器420可以具有流体地连接入口腔室和出口腔室的通道。
67.在替代性实施例中,流体调节器420可包括在具有脉冲阻尼部件(未示出)的盒组件中,而不是利用连接器或管841,该脉冲阻尼部件在结构上类似于下文参考图14-图18所描述的加温盒422,但流体阻尼部件不用于流体加温。例如,脉冲阻尼部件可包括刚性本体(例如,类似于图14-图18中所示的刚性本体1472)和柔性侧片材(例如,类似于图14-图18中所示的柔性侧片材1473、1474),其中刚性本体和柔性侧片材至少部分地限定了将流体调节器420的入口腔室1053(图10)连接到流体调节器420的出口腔室1054(图10)的流体路径。在替代性实施例中,脉冲阻尼部件可包括柔性器皿或通道而没有刚性本体,其中该柔性器皿或通道限定了流体地连接到流体调节器420的入口腔室1053(图10)和出口腔室1054(图10)的流体路径。在上文所描述的任何实施例中,柔性器皿或通道能够膨胀和收缩以抑制流体脉动。即,柔性器皿或柔性侧片材可以随着移动通过导管的流体的压力波动而膨胀和收缩,以减少流体的脉动。对流体脉动的这种阻尼促进在外科手术期间的稳定扩张和良好的可视化。流体调节器420和脉冲阻尼部件可以通过任何合适的手段而连接,诸如例如本技术中关于流体调节器420和流体加温盒422的连接所讨论的任何手段。在某些实施例中,流体调节器和脉冲阻尼部件可以包括在集成式盒组件中,其中流体调节器420和流体阻尼部件包括在单个盒中。在某些实施例中,具有刚性本体和柔性侧片材的脉冲阻尼部件或者用于脉冲阻尼的柔性器皿或通道可不连接到流体调节器420,而是改为连接在出口端口634(图10)和手术部位之间的管道组中。
68.参考图9,流体调节器420被构造成与流体调节组件315的一个或多个非接触式传感器(例如,传感器943-950)连接或对齐,使得传感器可以在不接触流体的情况下感测流体的一种或多种特性。例如,流体调节组件315可包括一个或多个流体存在传感器(943、947、948、950)、一个或多个流体温度传感器(944、945、946)以及连接到位于主单元102中的一个或多个压力传感器949的端口1062(图10)。连接到一个或多个压力传感器949的端口1062(图10)还可连接到螺线管阀951以用于排出已积聚在流体调节器420中的过多空气。压力传感器949和螺线管阀951可通过一个或多个管或导管和连接部件952连接到端口1062。流体管理系统100的控制系统可被构造成基于流体调节组件315(图3)和流体调节器420之间的接口来至少部分地控制泵212对流体的加压、加热器组件314对流体的加温、以及从流体调节器420中对空气的排出。
69.参考图10至图13,流体调节器420的示例性实施例可包括刚性本体1052,该刚性本体限定第一或入口腔室1053和第二或出口腔室1054。在一些实施例中,流体调节器420可包括完全或部分地封闭的中间腔室1075,该中间腔室位于入口腔室1053和出口腔室1054之间以在入口腔室和出口腔室的壁之间提供分离间隙。由中间腔室1075产生的这种分离间隙防止了在传入流体和传出流体之间的热传递,如果入口腔室1053与出口腔室1054共用公共壁,则将发生热传递。刚性本体1052可以是例如注射模制本体。参考图12和图13,流体调节器420还可包括膜1255,该膜连接到刚性本体1052以进一步限定和封闭腔室1053、1054从而产生流动路径。膜1255可以通过胶合、激光焊接、超声波焊接或任何其他合适的手段连接到刚性本体1052。膜1255被构造成允许感测组件315(图3)的一个或多个传感器在不接触流体的情况下感测移动通过入口腔室1053和出口腔室1054的流体的一种或多种特性。膜1255可以是例如塑料膜。在替代性实施例中,流体调节器420不包括膜1255,而是流体调节器420是
刚性器皿,其被构造成允许感测组件315(图3)的一个或多个传感器在不接触流体的情况下感测流体的一种或多种特性。在这些实施例中的一些中,与感测组件的传感器对齐的刚性器皿的一部分相对于允许传感器感测流体特性的流体器皿的其余部分可以具有减小的厚度。在上文提到的实施例中,入口腔室1053可具有入口端口625和出口端口527,并且出口腔室1054可具有入口端口533和出口端口634。出口端口527和入口端口533可以具有o形环(例如,图13中所示的o形环1363)以进行不透水的连接。在某些实施例中,入口端口625和出口端口634可以具有用于连接到流体管道的有倒钩的和/或胶合的部分。
70.参考图9至图11,流体入口腔室1053与以区域1156为目标的流体存在传感器943和以区域1157为目标的流体入口温度传感器944对齐。泵212(图2)的操作引起流体从流体供应袋或容器流过入口端口625进入入口腔室1053中。入口腔室1053可具有突出壁1058,该突出壁引起腔室的区段变薄或变浅,这通过引起层流穿过该区段来缓解气泡停滞。流体存在传感器943验证流体存在于入口腔室1053中且因此可以被系统100用来监测性能并识别任何问题。例如,如果泵正在操作,但流体存在传感器943未检测到流体,则控制系统可通知用户检查断连的管道管线或流体容器和流体调节器420之间的流体路径的可能阻塞,诸如例如,扭结的管道或闭合的夹子。
71.流体温度传感器944可具有几种功能。例如,在加热器组件314用于将流体加温到期望温度(例如,由用户输入的温度或默认的系统温度)的实施例中,流体温度传感器944允许控制系统监测进入加温盒422的流体的温度,使得控制系统可以调整由加热器组件314提供的ir能量的量,以引起进入流体调节器420的出口腔室1054的流体处于期望温度。另外,如果用户已将具有处于高、潜在不安全水平的流体温度的预加温流体袋悬挂,则控制系统可禁用泵212和/或加热器组件314,且然后通知用户这种操作将保持禁用,直到流体温度已充分冷却或者流体供应袋或容器已更换。替代地,控制系统可继续操作,同时增加通过加热器组件314的空气流以在流体到达流体调节器420的出口腔室1054之前充分冷却流体。如果这种尝试失败,则以区域1159为目标的流体出口温度传感器945和/或以区域1160为目标的流体上限或热熔断温度传感器(“tco传感器”)946将引起控制系统禁用流体泵送和加温操作,直到流体的温度已充分冷却。附加地,假设在手术室环境中用户已启用流体加温功能,温度传感器944可以用于通知用户进入流体调节器420的流体的温度是否可能太冷以至于无法达到期望的流体温度。最后,控制系统还可以确定加热器组件314是否存在问题。例如,如果温度传感器944检测到进入入口腔室1053的温度是可接受的,但是传感器945检测到流体的温度没有达到期望的流体温度,则控制系统将通知用户加热器组件314可能存在问题。
72.仍然参考图9至图11,流体调节器420的出口腔室1054可被设计成将气泡与被递送到手术部位的流体分离,气泡可能由流体袋变化或流体加温过程引起。例如,流体出口腔室1054可具有基本上竖直的壁或挡板1061(图10-图11),该壁或挡板在流体接合壁时引起气泡与流体分离。如所图示的实施例中所示,挡板1061可不连接到出口腔室1054的周边。
73.在某些实施例中,出口腔室1054被设计成促进经由位于主单元102中的压力传感器949来进行流体压力监测和控制。例如,流体调节器420的插入可引起流体调节器420的出口腔室1054与位于主单元102中的压力传感器949之间经由压力端口1062和一个或多个管或导管(未示出)进行连接。由于截留在出口腔室1054中的流体和压力传感器949之间的气穴的压力指示流体压力,因此控制系统监测由压力传感器949读取的有关设定点流体压力
的流体压力,并且控制系统调整泵212的速度以达到并保持设定点流体压力。为了确保压力监测准确性和防范过压情况,控制系统不断地比较压力传感器949的读数以确保它们相同,除了针对这种传感器的正常公差之外。独立于软件,控制系统可采用冗余硬件电路,如果流体压力超过手术的最大可允许压力,则这些冗余硬件电路禁用或反转泵212。
74.为了确保压力传感器949与流体保持隔离,出口腔室1054被设计成不仅保持压力传感器949和流体之间的气穴,而且还包括充当流体屏障的疏水过滤器1065。这种疏水性过滤器1065还可充当细菌屏障以保持流体的无菌性。为了保护疏水过滤器1065免于在紊流或高流动状况下与进入出口腔室1054的流体接触,出口腔室1054可包括弧形壁或屏障1066,该弧形壁或屏障与挡板1061结合来确保越过挡板1061顶部的任何流体都被引导远离疏水过滤器。压力端口1062还可包括用于进行不透流体的连接的o形环1364(图13)。
75.除了用于入口腔室1053的存在传感器943之外,还可存在与出口腔室1054对齐的至少三个附加的流体存在传感器(947、948、950)。位于出口腔室1054的出口端口634处的流体存在传感器947(“流体出口传感器”)以区域1167为目标并且用于确保恰当的流体流量通过流体调节器420。例如,如果控制系统检测到泵212正泵送流体,但流体出口传感器947未检测到流体,则控制系统可禁用泵212和/或通知用户系统100存在问题。另外,如果流体加温功能存在并且被启用,则流体出口传感器947确保在流体加温功能开始或继续之前流体加温盒422充满流体。
76.位于出口腔室1054中点处的流体存在传感器948以区域1168为目标并且用于控制已积聚在出口腔室1054中的空气量。在正常操作期间,出口腔室1054中的流体液位应保持接近出口腔室的中点。如果流体中点传感器948未检测到流体,并且压力传感器949正在读取正压力,则控制系统打开螺线管阀951以排出已积聚在出口腔室1054中的过多空气,直到流体中点传感器948检测到流体(即,直到流体液位已增加到出口腔室1054的中点)。为了避免对系统100的压力监测和控制功能产生重大影响,螺线管阀951可具有小孔口或限制件,使得出口腔室1054中的过多空气以低的受控速率被泄放。替代地,系统100可以对流体压力读数求平均值,使得缓解与空气排出功能相关联的任何微小压力减小的影响,或者系统100可以在螺线管阀951保持打开时忽略流体压力读数。
77.定位成接近出口腔室1054的压力端口1062的流体存在传感器950以区域1169为目标,以确保恰当操作系统100的压力感测功能,这需要在出口腔室1054中的流体和感测组件315的压力传感器949之间保持气穴。该气穴的压力由压力传感器949监测,并且由于流体压力的增加和减小而增加和减小。如果流体液位到达保护压力端口1062的疏水过滤器1065,则控制系统可能失去准确地监测流体压力的能力。因此,如果流体压力端口传感器950感测到流体,则控制系统可禁用泵212。
78.参考图6以及图14至图18,如果系统100包括具有流体加温能力的主单元102(例如,当被构造成用于手术室环境时),流体调节器420将通常连接到流体加温盒部件422。将流体调节器420和流体加温盒422联结在一起形成了盒组件419并且引起在流体调节器420的入口腔室1053(图10)和在加温盒422的第一侧1671(图16-图18)上的第一流体路径629(图6)之间进行流体连接。该连接还引起在加温盒422的第二侧1670(图16-图18)上的第二流体路径631(图6)和流体调节器420的出口腔室1054(图10)之间进行流体连接。
79.流体加温盒422可包括刚性本体1472(图14-图18)、第一薄柔性片材1473(图15-图
18)和第二薄柔性片材1474(图15-图18)。参考图16-图18,第一柔性片材1474连接到刚性本体1472的第一侧1671以限定第一流体流动路径629,并且第二柔性片材1473连接到刚性本体1472的第二侧1670以限定第二流体流路631。在所图示的实施例中,第一流体流动路径629和第二流体流动路径631通过连接器或管530(图14-图15)而连接。在其他实施例中,第一流动路径和第二流动路径可通过通道而连接,该通道是构成加温盒422的组成部分。刚性本体1472可以是例如注射模制本体。柔性侧片材1473、1474可以由例如塑料制成,塑料对ir是高度可透过的以促进流体加温功能。刚性本体1472和柔性侧片材可通过胶合、激光焊接、超声波焊接或任何其他合适的手段而连接。
80.柔性侧片材1473、1474可被构造成膨胀和收缩以有效地抑制由泵212生成的流体脉动,这允许递送到手术部位的流体是非脉动的。即,虽然系统100可利用生成脉动流体流动的蠕动泵,但是位于蠕动泵下游的流体加温盒422可包括薄的柔性侧片材1473、1474以至少部分地限定流体路径并且随着移动通过加温盒的流体的压力波动而膨胀和收缩,以抑制流体脉动。对流体脉动的这种阻尼促进在外科手术期间的稳定扩张和良好的可视化。
81.参考图6,在操作中,来自流体供应袋或容器的流体经由端口625进入流体调节器420的流体入口腔室1053(图10)、进入流体加温盒422、流过在流体加温盒422的第一侧1671(图16-图18)上的流体路径629的第一长形区段、离开该流体路径的第一长形区段并经由连接器530进入在流体加温盒的第二侧1670上的流体路径631的第二长形区段、离开流体加温盒422并进入流体调节器420的流体出口腔室1054,且然后离开流体出口腔室1054以便经由端口634递送到手术部位。
82.系统100可以通过监测设定点流体温度和由温度传感器945(图9)感测到的实际出口流体温度之间的差异来控制流体温度,以根据比例积分控制和缩放来调整到ir灯组件737(图7)的功率,该比例积分控制和缩放是基于实际流体流率和/或由温度传感器944(与流体调节器420的入口腔室1053对齐)感测到的实际流体温度和由温度传感器945(与流体调节器420的出口腔室1054对齐)感测到的实际流体温度之间的差异。替代地,可以采用其他合适的开环和闭环控制系统,诸如例如比例控制、积分控制、比例-积分-微分控制、数学建模、预测函数控制、误差平方控制和起停式(bang-bang)控制。
83.除了控制方案之外,还可以通过利用流体加温盒422的薄的柔性侧片材1473、1474(图15)来增强流体加温效率,这些柔性侧片材对ir能量是高度可透过的并且是注射模制的刚性本体1472(例如,黑色注射模制本体),其从ir灯组件737(图7)吸收ir能量并将ir能量辐射回到流体。附加地,可以通过流体加温盒422的限定流体路径629、631的长形区段来增强流体加温效率。流体加温盒422的长形区段可以通过以下方式来促进均匀的热量分布:在中心线处或下方将流体引入到每个区段中并使流体在相对端的顶部处从每个区段离开,使得在流体沿着流体路径629、631中的每一者移动时,它从较低位置移动到较高位置。
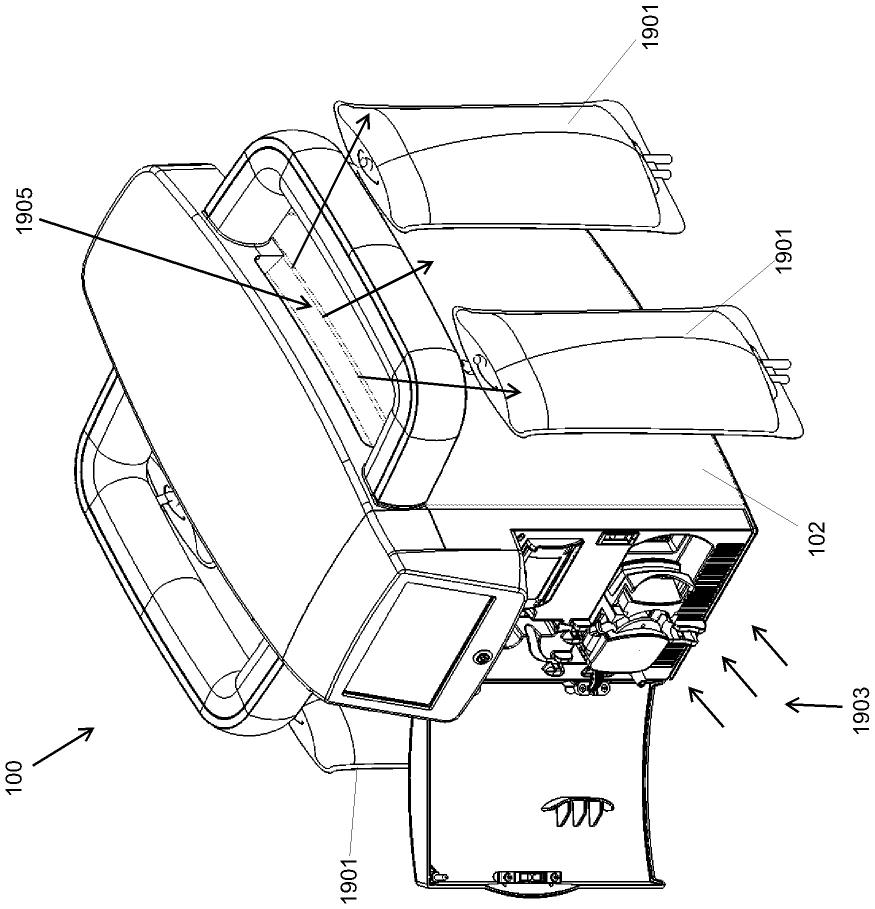
84.参考图19,在某些实施例中,还可以通过对流体容器1901进行预加温来增强系统100的流体加温效率。即,进气口1903允许在流体加温过程期间由加热器组件314(图3)的风扇316(图3)将空气抽取到主单元102以冷却加热器组件314和主单元102,并且该空气由于与加热器组件314交互而变热。然后,加热的空气由主单元102通过排气开口1905排放并且被引导朝向在主单元102的每一侧上的流体容器1901,使得这些流体容器内的流体在被泵送通过流体调节器420(图6)和流体加温盒422(图6)之前被预加温。
85.为了防范温度过高情况,系统100具有下限和上限:如果流体温度超过安全下限,则禁用ir灯739(图7),而如果流体温度超过安全上限,则禁用ir灯739和泵212。在一些实施例中,独立于软件,系统100采用硬件电路,该硬件电路包括热熔断传感器(“tco”)946(图9)以在超过上限的温度过高状况下禁用ir灯和泵。在一些实施例中,系统100采用冷却风扇来移除热,以有助于防止和/或缓解温度过高状况。冷却风扇可基于热敏电阻或其他温度传感器输入和/或可能导致温度过高(例如,在最大流率下需要充分加热的情况下流率的快速减小)的加热算法条件进行电子控制。
86.很大程度上由于系统100的流体加温功能(流体加温功能旨在将流体快速加温到设定点流体温度并在高流率下保持设定点流体温度),对于标称供电电压为120 v的市场,系统100必须连接到专用的20安培电路。然而,系统100可以被构造成用于通过利用较低瓦数的灯和/或到灯的电流限制功率而连接到标准的15安培电路。在某些实施例中,流体管理系统100被构造成借助120 v或240 v的标称供电电压操作而无需换灯。例如,系统100可以包括跨接电路,该跨接电路包括阈值检测器770(图7a)和继电器组771(图7b-图7c)。参考图7,在某些实施例中,灯组件737包括四个灯739(例如,在盒419的每一侧上为两个灯)。图7b示出了用于灯组件737中的两个灯739(例如,定位在盒419的同一侧上的两个灯739)的继电器组771的电路,其中继电器触点775、777处于第一位置中,在该第一位置中,灯739放置处于并联配置。图7a示出了阈值检测器770的电路,该阈值检测器会引起继电器触点775、777(图7b-7c)移动到第二位置(如图7c中所示)中,在该第二位置中,灯739放置处于串联配置。虽然图7b和图7c示出了用于设置在图7中所示的盒719的一侧上的两个灯739的继电器组771的电路,但是应理解,在盒的另一侧上的另外两个灯739的电路可与图7b和图7c中所示的电路相同。
87.参考图7a,阈值检测器770具有ac线路输入772和ac线路输入774,这两个ac线路输入各自连接到双向光电耦合器776的输入侧,其中供应到加热组件314的电压也被施加到输入772、774。第一齐纳二极管(第一稳压二极管,first zener diode)778定位在线路输入772和光电耦合器776的输入之间,并且第二齐纳二极管780定位在线路输入774和光电耦合器776的输入之间。齐纳二极管778、780防止电流从输入772、774流过光电耦合器776,直到施加到输入772、774的峰值电压大于或等于预定量。光电耦合器776包括连接到电压源784的晶体管输出元件782,其中晶体管输出元件782被构造成利用线路786在“接通”位置和“断开”位置之间操作,其中该线路生成用于使操作继电器组771的继电器线圈788通电的控制信号。当电流没有移动通过光电耦合器776的输入时,晶体管输出元件782保持断开,而当电流流过齐纳二极管778、780并进入光电耦合器776的输入时,晶体管输出元件782接通。当晶体管输出元件782接通时,来自电压源784的电流使线路786通电以生成控制信号来激活线圈788a-d并使继电器组771的对应触点(例如,触点775、777)从第一位置(如图7b中所示)移动到第二位置(如图7c中所示)。在一些实施例中,控制信号在使线圈788a-d通电之前被施加到施密特触发器(schmitt trigger)790和晶体管阵列792。施密特触发器790确保线路786上的电压稳定并且在连接到晶体管阵列之前超过预定极限。晶体管阵列792使线圈788a-d通电并使继电器触点775、777从第一位置移动到第二位置。
88.参考图7b,在所图示的实施例中,当灯739处于并联配置时,触点775、777处于第一位置中。当处于第一位置中时,触点775、777在点4和5处被连接,使得两个灯739都与电路的
入口773连通。这允许移动通过入口773的电流的一半沿着第一路径779移动到一个灯739中,且电流的一半移动通过第二路径781(通过触点775)并进入第二灯739中。在该配置中,施加到入口773的相同电压被单独地施加在两个灯739的两端,使得每个灯739都接收到进入电路的电压。例如,如果将120v施加到入口773,则120v连接到第一路径779和第二路径781两者,使得每个灯都接收到120v。
89.参考图7c,当阈值检测器770(图7a)引起触点775、777移动到第二位置时,在点3和5之间进行电连接,使得灯739以串联配置连接。在此配置中,施加到入口773的所有电流都沿着单个路径783移动(因为点4和5之间的断连阻止了电流在进入入口773之后直接移动通过触点775),使得电流移动通过一个灯739,继续沿着路径783移动,使得电流移动通过点3和5处的触点775,且然后电流移动到第二灯739中。因为两个灯739都沿着单个路径783设置,所以施加到灯739的电压在设置于路径783上的一定数量的灯之间分配。由于所图示的实施例包括两个灯739,因此每个灯739接收到进入入口773的电压的一半。例如,如果将240v施加到入口773,则所有电流都沿着单个路径783流动,使得一个灯739两端的电压降为120v,并且该下降的电压沿着单个路径783施加,使得另一个灯接收120v。
90.流体管理系统100可被构造成为在手术室环境中执行的外科手术提供准确和可靠的基于流动的不足监测。例如,图20至图49图示了用于图1中所示的流体管理系统的不足模块104和单用途或多用途的不足盒2010的示例性实施例。不足盒2010的使用消除了对罐的需要,并且避免了使流体管理系统100的传感器和其他耐用部件暴露于自手术部位返回的流体。不足模块104与主单元102的控制系统和包括不足盒2010的单用途或多用途的管道组结合工作,以在自手术部位返回的流体体积移动通过不足盒2010时测量和记录该流体体积。流体通过吸取源(例如,构成系统100的组成部分或在该系统外部的真空泵)从手术部位汲取并且既被汲取进入又被汲取出不足盒2010。在替代性实施例中,通过比存在于不足盒2010内部的正压更大的正压(例如,构成系统100的组成部分或在该系统外部的蠕动泵,该蠕动泵直列式地插入在手术部位和不足盒2010之间并且被构造成在手术部位处产生吸力并在不足盒2010的入口处产生正压力),可将流体从手术部位汲取并推送入不足盒2010中,并且通过比存在于不足盒2010内部的压力更加负的压力(例如,构成系统100的组成部分或在该系统外部的真空泵,或不足盒2010内部由于蠕动泵所产生的正压力所致的足以将流体从不足盒2010中推送出来达到环境压力的正压力),可从不足盒2010汲取流体。
91.参考图20至图23,不足盒2010插入到不足模块104中。不足盒2010可包括与不足模块104的开口2220(图22-图23)对齐的前区段2218以及允许用户容易地抓握不足盒2010以从不足模块104移除盒的凸起部分2222(图22-图23)。不足盒2010包括一个或多个入口开口2012、2014,所述一个或多个入口开口被构造成连接到管道组的一个或多个流体返回管,使得流体可以从手术部位移动并进入不足盒2010中。不足盒还包括至少一个真空开口2016,所述至少一个真空开口被构造成连接到排空管,使得流体在移动通过不足盒2010之后移动通过排空管。排空管连接到吸取源,使得将真空压力供应到不足盒以将流体从手术部位汲取进入和汲取出不足盒2010。在将不足盒插入到不足模块104中之后,流体返回管和排空管可手动连接到不足盒2010。
92.主单元102的控制系统被构造成通过将移动通过不足盒2010的流体体积与供应到手术部位的流体体积进行比较来确定提供给手术部位和自手术部位返回的流体的不足。控
制系统可通过例如监测流体供应袋或容器的重量(例如,通过使用操作性地连接到称重传感器(load cell)的悬挂构件116)和/或对蠕动泵的转数进行计数来计算供应到手术部位的流体体积。
93.参考图24至图28,将不足盒2010插入到不足模块104中引起歧管连接组件2424(图27-图28)接合不足盒2010并且经由泵歧管组件(例如,图37中所示的泵歧管组件3513)、正压力泵和负压力泵(分别为图35-图36的3515和3517)和不足模块104的压力传感器(未示出)连接到气动地操作的隔膜调节器/阀(例如,图26中所示的调节器/阀2628、2630、2632、2634)和不足盒2010的压力感测区域2636(图26)。歧管连接组件2424具有多个连接器(例如,图45和图49中所示的连接器4510、4511、4512、4513)以用于接收调节器/阀中的每一者的对应端口2540和不足盒2010的压力感测区域。参考图27-图28(和图42-图49),歧管连接组件2424的连接器可以被构造成通过机械或机电机构2726(例如,手动杆件、煎饼状圆筒件或其他类型的气动、机械或机电致动器)相对于端口2540在接合或连接状态和脱离或断连状态之间移动。不足盒2010的端口2540可包括允许歧管连接组件2424和不足盒2010之间进行气密密封连接的o形环。将不足盒2010插入到不足模块104中还引起不足模块104的一个或多个非接触式流体传感器2742(图30-图31)与不足盒2010的期望位置对齐。
94.歧管连接组件2424的连接器(例如,图45和图49中所示的连接器4510、4511、4512、4513)可被构造成考虑不足盒2010的端口2540中的任何制造或组装公差。即,连接器可被构造成移动以确保与不足盒2010的对应端口2540对齐,从而解决由不足盒2010的制造和组装造成的端口2540位置的微小差异。例如,参考图28a-图28c,在某些实施例中,歧管组件2424的连接器4512(也在图45和图49中示出)可为通过附接元件2815(例如,e形夹子)连接到歧管组件2424的单独部件,并且系统100的接收组件3511(也在图38-图39中示出)可包括开口3828(也在图38-图39中示出),该开口大于连接器4512的直径以用于接收连接器4512,使得连接器4512可以在开口3828内移动。
95.参考图28a,歧管连接组件2424被示为处于与不足盒2010的端口2540脱离的位置中。机构2726(图28)的激活引起歧管连接组件2424沿方向m移动,使得连接器4512接合不足盒2010的端口2540。图28b示出了连接器4512和端口2540之间的初始接合,且图28c示出了连接器4512和端口2540之间的完成的接合。参考图28b,不足盒2010的端口2540未以连接器4512为中心,这引起端口2540接合连接器4512的入口2813的边缘。接收组件3511的大开口3828允许连接器4512在开口3828内移动并与端口2540对齐。即,参考图28c,歧管连接组件2424沿方向m的持续移动引起端口2540与连接器4512对齐并移动到连接器4512中。在某些实施例中,连接器4512的入口2813是锥形的,以促进端口2540移动到连接器4512中。连接器4512和端口2540之间的上文所描述的连接允许不足盒2010和系统100之间的简单和自动连接(例如,经由不足模块104)。虽然图28a-图28c仅示出了连接器4512与不足盒2010的端口2540之间的连接,但是应理解,其他连接器(例如,图45和图49中所示的连接器4510、4511、4512、4513)可被构造成以与图28a-28c中描述的方式相同的方式连接到不足盒2010的端口2540。
96.参考图29-图34,不足盒2010可包括具有流体地连接的三个区段2946、2948、2950的单个腔室2944。这三个区段包括填充区段2946、测量区段2948和排空区段2950,当系统100在“填充/测量”和“填充/排空”周期之间交替时,填充区段2946、测量区段2948和排空区
段2950始终流体地连接,这允许跨越这三个区段的压力梯度被最小化或基本上相等。
97.填充区段2946流体地连接到入口开口2012、2014,使得自手术部位返回的流体可以通过入口开口2012、2014移动到填充区段2946中。排空区段2950流体地连接到真空端口2016,使得吸取源可以将真空压力供应到不足盒2010,该真空压力引起流体从手术部位移动、通过入口开口2012、2014进入不足盒2010中,并通过真空端口2016离开不足盒2010。在其他实施例中,在手术部位和端口2012和/或端口2014之间直列式的泵(例如,蠕动泵)可从手术部位汲取流体并将流体推送通过入口开口2012和/或2014并通过真空端口2016将流体从不足盒2010中推送出来。替代地,在手术部位和端口2012和/或端口2014之间直列式的泵(例如,蠕动泵)可从手术部位汲取流体并将流体推送通过入口开口2012和/或2014,同时单独的吸取源供应真空压力以通过真空端口2016将流体从不足盒2010中汲取出来。
98.一个或多个入口阀2628、2630可定位在入口开口2012、2014处并且被构造成闭合以防止流体进入腔室2944而避免过满状况。在某些实施例中,阀2628、2630是气动地操作的隔膜阀,所述隔膜阀连接到不足模块104的泵组件(例如,包括图35-图36中所示的正压力泵3515和负压力泵3517的组件),使得泵组件可以在打开位置和闭合位置之间移动阀2628、2630。在某些实施例中,泵组件的负压力泵打开隔膜阀,并且泵组件的正压力泵以正背压帮助隔膜阀的闭合。
99.气动地操作的隔膜阀2628、2630还可与泵组件(例如,包括图35-图36中所示的正压力泵3515和负压力泵3517的组件)结合工作,以充当调节供应到手术部位的真空压力的压力调节器。即,流体管理系统100的控制系统可被构造成调整由泵组件施加到阀2628、2630的压力的量,这调整了使柔性膜2956移位并允许流体流过2628、2630所需的阈值压力,并由此允许控制系统控制经由连接到真空端口2016的吸取源供应到手术部位的真空压力的量。例如,参考图29,阀2628、2630可各自包括限定腔室2959的壳体部件2958,其中腔室2959连接到不足盒的泵组件。柔性膜2956设置在腔室2959中并且可通过压力泵在腔室2959内移动。当阀2628、2630处于闭合位置中时,膜2956接合不足盒2010的腔室2944以将填充区段2946与入口开口2012、2014流体地隔离。压力泵被构造成在腔室内移动柔性膜2956以打开阀2628、2630,并且泵组件可以通过在由泵组件供应的压力和不足盒2010的腔室2944内的真空水平之间产生期望的压差来调整开口的尺寸。膜2956可以由例如氯丁橡胶、硅树脂、天然橡胶、丁腈橡胶、epdm或任何其他合适的材料制成。阀2628、2630还可具有疏水过滤器2960以防止流体在柔性膜撕裂或其他故障的情况下行进到泵组件。换言之,阀2628、2630类似于参考本技术的图52-图73描述的压力调节器来工作,以调节供应到手术部位的真空压力。
100.在所图示的实施例中,填充区段2946定位在腔室2944的顶部分处,并且测量区段2948定位在填充区段2946下方。阀2632定位在填充区段2946和测量区段2948之间的开口中并且可在打开位置和闭合位置之间移动。当阀2632处于打开位置中时,填充区段2946和测量区段2948流体地连接,使得填充区段2946中的流体可以经由重力移动到测量区段2948中。不足模块104的一个或多个传感器用于测量在测量区段2948内的流体。在某些实施例中,测量区段包括主区域3276(图32)和定位在主区域3276上方的窄区域3277(图32),其中能够设置在这些区域3276、3777中的流体体积是为系统100所知的,使得系统可以确定移动通过测量区段2948的流体体积。下文将更详细描述对测量区段2946内的流体的测量。排空
区段2950定位在测量区段2948下方,并且阀2634定位在测量区段和排空区段之间的开口中并且可在打开位置和闭合位置之间移动。当阀2634处于打开位置中时,测量区段2948和排空区段2950流体地连接,使得测量区段2948中的流体可以经由重力移动到排空区段2950中。在所图示的实施例中,阀2632、2634是气动地操作的隔膜阀,所述隔膜阀连接到不足模块104的泵组件(例如,包括图35-36中所示的泵3515、3517的组件),使得泵组件在打开位置和闭合位置之间移动阀2632、2634。
101.参考图32,阀2628、2630、2632、2634可包括柔性膜(例如,图29中所示的柔性膜2956),该柔性膜可利用不足盒2010的开口3290在接合位置和脱离位置之间移动。即,开口3290的一部分将入口2012、2014流体地连接到填充区段2946,开口3290的另一个部分将填充区段2946流体地连接到测量区段2948,并且开口3290的另一部分将测量区段2948流体地连接到排空区段2950。阀2628、2630、2632、2634的柔性膜接合开口3290以防止流体在入口/区段之间移动,并且脱离开口3290的至少一部分以允许流动在入口/区段之间移动。开口3290的尺寸和间距可被构造成当正压力施加到阀2628、2630、2632、2634时防止柔性膜通过开口3290挤出。开口3290的尺寸和间距可基于柔性膜材料的挠曲和/或厚度而变化。与每个阀2628、2630、2632、2634相关联的一定数量的开口3290被构造成确保足够的流体流动通过不足盒2010。在某些实施例中,在阀2628、2630、2632、2634的每一侧上的开口的组合表面积基本上等于附接到不足盒2010的入口端口2012、2014的管道的内部截面积。因为重力是作用在流体上以引起流体在腔室2944的区段2946、2948、2950之间移动的主导力,所以在一些实施例中,对应于阀2632、2634的一定数量的开口3290被构造成足够大以允许足够的流量通过阀2632、2634以实现高流率。例如,对应于每个阀2632、2634的一定数量的开口3290可被构造成在不阻止自手术部位的流动的情况下实现通过腔室2944的大于或等于1200 ml/min的目标流率。在某些实施例中,因为腔室2944的测量区段2948可在流体从手术部位持续流动时既被填充又被清空,所以通过阀2632、2634的流体流率可为通过腔室2944的目标流率的至少两倍。
102.在所图示的实施例中,腔室2944包括将填充区段2946流体地连接到排空区段2950的通道2952以及将填充区段2946流体地连接到测量区段2948的窄部分3277。通道2952和窄部分3277允许填充区段2946、测量区段2948和排空区段2950始终流体地连接,包括当阀2632、2634中的一者或两者处于闭合位置中时。填充区段2946、测量区段2948和排空区段2950之间经由通道2952和窄部分3277的这种流体连接允许跨越腔室2944的三个区段的压力梯度被最小化或基本上相等,使得压力源不引起流体在腔室2944内移动,而是流体可以由于重力所致而在腔室2944内移动。在某些实施例中,不足盒包括壁3252,该壁定位成防止流体进入通道2952并绕过测量区段2948。在替代性实施例中,不足盒2010可以包括连接器或管(例如,类似于图8中所示的用于流体调节器420的管841),而不是腔室2944包括通道2952,该连接器或管将填充区段2946流体地连接到排空区段2950,使得填充区段2946、测量区段2948和排空区段2950始终流体地连接。虽然所图示的实施例将三个区段2946、2948、2950示为处于堆叠配置,但在替代性实施例中,这三个区段可以处于并排配置,只要流体可以经由重力从填充区段2946行进到测量区段2948再到排空区段2950即可。
103.在各种实施例中,不足盒2010包括废物真空水平感测和调节端口2636,该端口用于连接到不足模块104的螺线管阀(该螺线管阀在一侧上对环境开放)和压力传感器。流体
管理系统100的控制系统能够经由不足模块104的压力传感器来感测腔室2944的真空水平并打开螺线管阀达到大气压力以经由吸取源来向下调节供应到不足盒2010的真空压力。参考图29,端口2636可包括限定腔室2975的壳体部件2973,其中腔室2975连接到不足模块104的螺线管阀和压力传感器。柔性膜2977设置在腔室2975中并且具有开口2979,该开口使得能够对腔室2944中的压力进行压力测量并且在螺线管阀打开时使腔室2944暴露于环境。隔膜2977可以由例如氯丁橡胶、硅树脂、天然橡胶、丁腈橡胶、epdm或任何其他合适的材料制成。端口2971还可具有疏水过滤器2981。
104.参考图30至图32,不足盒2010与不足模块104的一个或多个传感器2742(例如,图30-图31中所示的传感器3062、3064、3066、3068、3070)对齐,使得流体管理系统100的控制系统可以使用传感器2742来检测移动通过不足盒2010的腔室2944的流体体积和/或检测通过不足盒的流体流动的任何潜在问题(例如,在腔室2944的区段2946内的潜在流体溢流)。在所图示的实施例中,所述一个或多个传感器2742包括第一流体存在传感器3062、第二流体存在传感器3064、第三流体存在传感器3066、第四流体存在传感器3068和第五流体存在传感器3070。参考图32至图34,在所图示的实施例中,第一流体存在传感器3062和第二流体存在传感器3064分别与填充区段2946内的第一区域3271和第二区域3272对齐。如果填充区段2946内的流体到达第一区域3271和第二区域3272,则控制系统使用这些流体存在传感器3062、3064来闭合入口阀2628、2630中的一者或两者。第三流体存在传感器3066与腔室2944的测量区段2948中的第三区域3273对齐,并且被控制系统用于从填充/测量周期切换到填充/排空周期并在切换到填充/排空周期之前确定测量区段2948内的流体体积。第四流体存在传感器3068与测量区段2948内的第四区域3274对齐,并且被系统用于从填充/排空周期切换到填充/测量周期。第五流体存在传感器3070与测量区段2948内的第五区域3275对齐,并且被系统用于提供测量区段2948中的更准确的实时流体体积测量以及在手术完成或为记录流体不足所监测的流体类型改变之后确定测量区段2948中的流体体积以提供针对流体的更准确的流体不足计算。虽然所图示的实施例将不足模块104示为具有用于检测不足盒的腔室2944内的流体流动状况和体积的五个流体存在传感器,但是应理解,不足模块可以使用任何其他合适数量的流体存在传感器来检测流体流动状况和体积。目标区域3271-3275可包括部分地包围它们的壁,以缓解流体紊流对传感器读数的准确性和膜2980的任何挠曲的影响。
105.参考图29,在所图示的实施例中,不足盒2010包括刚性本体2978和膜2980。刚性本体2978部分地限定了各个区段2946、2948、2950以及腔室2944的通道2952和窄部分3277,并且膜2980附接到刚性本体2978以封闭腔室2944。刚性本体2978可以是例如注射模制本体或任何其他合适的刚性本体。膜2980被构造成允许不足模块104的所述一个或多个传感器在不接触流体的情况下检测通过膜的流体的特性。膜2980可以是例如塑料膜。膜2980可以利用机械紧固件或通过胶合、激光焊接、振动焊接、超声波焊接或任何其他合适的手段附接到刚性本体2978。在替代性实施例中,不足盒2010不包括膜2980,而是由注射模制的器皿制成,该器皿能够使不足模块104的所述一个或多个传感器在不接触流体的情况下检测通过器皿的流体的特性。在其他替代性实施例中,器皿可由能够进行清洁和重复使用的材料铸造或机加工而成。
106.图33和图34图示了不足盒2010的填充/测量周期和填充/排空周期。参考图33,在
填充/测量周期期间,自手术部位返回的流体经由来自吸取源的真空压力而从手术部位通过入口端口2012、2014被汲取入不足盒2010的填充区段2946中,该吸取源附接到真空端口2016。隔膜操作的阀2632处于打开位置中,这允许流体经由重力从填充区段2946行进到测量区段2948。隔膜操作的阀2634处于闭合位置中,这防止来自测量区段2948的流体移动到排空区段2950中。填充/测量周期继续,直到测量区段2948中的流体液位已达到如由不足模块104的以区域3273为目标的流体存在传感器3066(图30-图31)感测到的预定水平。在所图示的实施例中,目标区域3273设置在测量区段2948的窄部分3277(图32)中,该窄部分从测量区段2948的主部分3276(图32)延伸到上方。与测量区段2948的主部分3276中的流体体积相比,窄部分3277中的流体体积小,且因此包括流体流率和紊流(这会影响感测的流体液位的准确性)的变量不会对测量功能的整体准确性产生重大影响。在某些实施例中,主部分3276的体积与窄部分的体积之比可以大于或等于5比1,诸如大于或等于20比1、诸如大于或等于50比1、诸如大于或等于75比1、诸如大于或等于90比1、诸如大于或等于100比1。在示例性实施例中,主部分3276的体积与窄部分的体积之比可以是约100比1。测量区段2948的主部分3276和窄部分3277内的流体体积是为系统100所知的,这允许系统在每次填充/测量周期发生时记录测量区段内的流体体积。系统100记录体积,且然后转变到填充/排空周期。
107.参考图34,在填充/排空周期期间,隔膜操作的阀2632移动到闭合位置,这防止来自填充区段2946的流体移动到测量区段2948中。隔膜操作的阀2634移动到打开位置,这允许在填充/测量周期期间在测量区段2948中测量的流体经由重力移动到排空区段2950中。进入排空区段2950的流体然后经由所附接的吸取源通过真空端口2016被排空,并且流体经由间接到引流管(indirect-to-drain)或直接到引流管(direct-to-drain)方法移动到设施的废物处置系统。为了从排空区段排空流体,排空周期依赖于由吸取源提供的真空压力和腔室2944内部的向下调节后的真空压力(如经由压力调节和感测端口2636来调节)之间的真空压差。当以区域3274为目标的流体存在传感器3068(图30-图31)检测到测量区段2948中没有剩余流体时,系统100转变回到填充/测量周期。填充/测量周期和填充/排空周期之间的交替继续,直到手术完成,并且控制系统至少部分地基于在各种填充/测量周期期间获取的各种体积测量记录来确定流体的流体不足。
108.流体从填充区段2946到测量区段2948和排空区段2950的移动是靠重力来完成的,而不是靠外部吸取或压力源。在这些实施例中,阀可被尺寸确定为最小化阻力并由此以相对低的力促进高流率。气动地致动的隔膜阀2628、2630实现允许或阻止流入不足盒2010中,并且气动地致动的隔膜阀2632、2634通过由不足模块104的压力泵3515、3517(图35-36)将气动控制压力设定到比以下两者的组合更大的正表压来实现允许和阻止在区段2946、2948、2950之间的流动:1)在阀的任一润湿侧上期望的最高压力、和2)解决由于阀膜的弹簧系数产生的附加力所需的任何附加压力。
109.为了防范溢流状况,不足模块104可具有以区域3272为目标的流体存在传感器3064(图30-图31),并且控制系统可被构造成在流体存在传感器3064在目标区域3272处检测到流体的情况下闭合流体返回阀2628(例如,该阀连接到手术部位处的身下铺巾和/或地板吸取件)。这确保了填充区段2946不会过满并通过窄部分3277流入测量区段2948中或通过通道2952流入排空区段2950中,并且确保了填充区段的剩余容量保持可用于接收自手术部位处的手术器械返回的流体以免中断外科手术。不足模块还可具有以区域3271为目标的
流体存在传感器3062(图30-图31),并且控制系统可被构造成在存在传感器3062在目标区域3271处检测到流体的情况下闭合流体返回阀2630(例如,该阀连接到手术部位处的手术器械)。在替代性实施例中,阀2628可以连接到手术部位处的手术器械,并且阀2630可以连接到手术部位处的身下铺巾和/或地板吸取件。
110.为了提供手术结束流体不足的准确性(假设外科手术的结束与填充/测量或填充/排空周期的结束不一致),不足模块104可包括以一个或多个区域(例如,区域3275)为目标的一个或多个中点流体存在传感器(例如,传感器3070),以提供对测量区段2948中的流体的更准确的实时测量以及在外科手术结束时或在外科手术期间使用的流体类型已改变之后测量在测量区段2948中的流体。
111.图35至图48图示了可以与图1中所示的流体管理系统100和图20-图34中所示的不足盒2010一起使用的不足模块104的示例性实施例。参考图35,不足模块104可包括用于接收不足盒2010的不足盒接收组件3511、用于在不接触流体的情况下感测移动通过不足盒的流体的特性的一个或多个传感器2742、泵组件3514、泵歧管组件3513、用于将不足盒2010连接到泵组件3514以及螺线管和压力传感器(经由泵歧管组件3513)的歧管连接组件2424、在与不足盒2010的接合位置(例如,如图47-图49中所示)和与该不足盒的脱离位置(例如,如图43-图45中所示)之间移动歧管连接组件的气动机构2726、以及印刷电路板(pcb)3519。
112.参考图38和图39,不足盒接收组件3511包括基部3821,该基部具有用于接收不足盒2010(图30-图34)的槽或开口3820。接收组件3511还包括一个或多个壁或部件3822-3826,当不足盒2010设置在接收组件3511内时,所述一个或多个壁或部件基本上将不足盒2010与不足模块104的内部内的其余部件分离。壁或部件3822-3826和基部3821可以通过一个或多个紧固件3827而连接以产生接收组件3511。接收组件3511的第一壁3822可以被构造成保持用于感测移动通过不足盒2010的流体的特性的所述一个或多个传感器2742。在所图示的实施例中,所述一个或多个传感器2742是检测流体存在的电容式传感器。然而,可利用其他流体液位或存在感测技术,包括红外传感器、激光传感器、光学传感器、机电传感器(例如,带有机械拨动开关致动的浮子、压电压力传感器等)、电感式传感器、超声波传感器或任何其他合适的传感器。
113.接收组件3511的第二壁3823可以包括多个开口3828以用于接收歧管连接组件2424的连接器(例如,图45和图49中所示的连接器4510-4513),使得泵组件3514可以操作性地连接到不足盒2010的隔膜阀和压力端口,如下文参考图42-图49更详细讨论的。参考图39,歧管连接组件2424可以连接到接收组件3511的壁3823或定位成与该壁相邻,并且气动机构2726可以通过一个或多个紧固件连接到歧管组件2424以及通过连接元件或板3930连接到不足模块104。
114.参考图35和图36,在所图示的实施例中,泵组件3514包括正压力泵3515和负压力泵3517,其中泵组件3514经由泵歧管组件3513连接到气动机构2726以及歧管连接组件2424的连接器。正压力泵3515将压力提供给气动缸2726以在与不足盒2010的接合位置(例如,如图47-图49中所示)和与该不足盒的脱离位置(例如,如图43-图45中所示)之间移动歧管连接组件2424。正压力泵3515还加快不足盒2010的隔膜阀的闭合或增加其闭合力。负压力泵3517将真空压力提供给不足盒2010的隔膜阀以将隔膜阀移动到打开位置。
115.参考图37,在所图示的实施例中,泵歧管组件3513包括多个积聚器(accumulator)
3732和螺线管阀3734以用于调节由泵3515、3517提供的压力以及不足盒2010的隔膜阀的打开和闭合。在某些实施例中,积聚器3732改变正压力和负压力以:(1)允许使用可以递送必要流率的较小压力泵;以及(2)通过经由“起停式”控制方案(即,打开阀、闭合阀控制方案)减少引入空气的影响来帮助压力调节。在所图示的实施例中,泵歧管组件3513包括五个积聚器3732(例如,延伸穿过组件3515的孔),这些积聚器在顶部和底部处被帽3735盖住)。泵歧管组件3513的螺线管阀3734可经由管道连接到歧管连接组件2424的连接器。
116.参考图42-图49,气动机构2726被示为在与不足盒2010的脱离位置(图43-图45)和与不足盒2010的接合位置(图47-图49)之间移动歧管连接组件2424。参考图43-图45,当处于脱离位置中时,连接器4510-4513不接合用于隔膜阀的端口2540和不足盒2010的压力端口。参考图47-图49,歧管连接组件2424通过气动机构2726沿方向d(图49)移动到接合位置,使得连接器4510-4513接合不足盒2010的对应端口2540。当连接器4510-4513接合不足盒2010的端口2540时,泵组件3514操作性地连接到不足盒2010,使得泵组件3514可以在打开位置和闭合位置之间移动不足盒的隔膜阀,并且供应到不足盒2010的真空压力可以由不足模块中的压力传感器感测到并通过打开螺线管达到大气来进行向下调节。
117.参考图35-图49,在某些实施例中,将不足盒2010插入到不足模块104的接收组件3511中引起不足盒2010与不足模块104的各种部件之间进行所有内部连接。例如,将不足盒2010插入到接收组件3511中引起气动机构2726将歧管连接组件移动到与不足盒的接合位置(例如,如图47-图49中所示)并将泵组件3514操作性地连接到不足盒。将不足盒2010插入到接收组件3511中还引起所述一个或多个非接触式传感器2742与不足盒2010的腔室2944(图29)对齐。不足盒2010和不足模块之间的这些自动连接是有利的,因为它限制了用户必须关于不足盒2010进行的连接的量。即,在将不足盒2010插入到不足模块104中之后,用户只需将(多条)流体返回管线连接到不足盒2010的入口开口2012、2014(图20)并且将排空管线连接到不足盒的真空开口2016(图20)。
118.参考图50,在某些实施例中,系统100可用于妇科、泌尿科和骨科手术,这些手术是在配备有第三方吸取和流体收集装置的手术室中执行的。在这些实施例中,系统100可以被构造成包括主单元102(例如,本技术中描述的任何主单元102)和不足模块104(本技术中描述的任何不足模块104),但不包括流体吸取和收集模块106。在该实施例中,包括不足盒2010(图20-图34)的管道组可以与主单元102和不足模块104结合使用,以确定在外科手术期间流体的流体不足。
119.参考图51,在一些情形下,妇科、泌尿科和骨科手术是在手术室中执行的,其中设施偏爱或需要对自手术部位返回的流体的“直接到引流管”处置。在这些情形下,设施常常偏爱或要求记录自手术部位返回的流体的体积。在一些实施例中,系统100可以被构造成包括流体流动监测和排空模块5101,该流体流动监测和排空模块包括不足模块104的特征。流体流动监测和排空模块5101可以与设施的中央吸取系统、主单元102和包括不足盒2010(图20-图34)或其他类似盒的管道组结合工作,以确定自手术部位返回并进入设施的废物处置系统的流体体积以及外科手术的流体不足。流体流动监测和排空模块5101可经由蓝牙或其他有线或无线手段与主单元102通信,以测量、记录和显示返回流体体积和/或外科手术的流体不足。
120.虽然流体流动监测和排空模块5101被描述为与流体管理系统100的主单元102结
合工作,但是应理解,流体流动监测和排空模块5101也可起独立的流体流动监测和排空模块的作用,所述流体流动监测和排空模块能够经由蓝牙或其他有线或无线手段与设施的其他设备通信。在记录流体体积之后,然后,模块5101可以处置直接进入设施的废物处置系统中的流体。在某些实施例中,流体流动监测和排空模块5101可以是壁装式单元或推车安装式单元。在一些实施例中,流体流动监测和排空模块5101可以包括集成式吸取源以与设施的中央吸取系统结合或代替该中央吸取系统工作。由于不足盒2010或其他类似盒的使用将自手术部位返回的流体与流体流动监测和排空模块5101的部件(例如,传感器、泵等)隔离,因此在每次手术之后使清洁溶液循环通过流体流动监测和排空模块是不必要的,这增强了手术效率。
121.系统100的基于流动的不足监测特征(例如,不足模块104和不足盒2010的组合,或流体流动监测和排空模块5101)实现了准确和可靠的流体不足监测,由于不足盒2010的单用途本性和罐的消除所致,这是具成本效益的。该特征还增强了手术效率,因为与罐的设置、连接、更换和丢弃相关联的中断也将被消除,以及消除了在每次手术之后清洁不足模块和/或监测和排空模块。在替代性实施例中,不足盒2010可被构造成用于多手术用途。
122.在某些情形下,流体管理系统100可连接到外部压力源(例如,吸取源),该外部压力源用于从手术部位汲取流体。由于外部吸取源在手术室环境中通常被设定到高真空水平,因此可有必要向下调节由外部吸取源提供的真空压力以便恰当操作某些流体流出调节、不足监测和/或收集功能。可以经由手动或电子控制的调节器(“调节器”)来完成对由外部吸取源提供的真空压力的向下调节,条件是它与自手术部位返回的生物危害性流体隔离,因为在每次外科手术之后替换或清洁调节器将非常昂贵和/或过度繁重。然而,通过将流体收集罐放置在调节器和手术部位之间来隔离调节器将是不期望的,这是由于罐的成本、设置它们的复杂性、在手术期间当它们变满时需要更换它们、以及在手术结束时需要处置它们所致。
123.参考图52,为了克服与调节器的使用相关联的问题,系统100可利用单用途或多用途的压力调节器5205,该压力调节器的制造具成本效益并且是一次性的。压力调节器5205由于它的可处置性而无需与自手术部位返回的生物危害性流体隔离。压力调节器5205可以与压力源(例如,气泵)和流体管理系统100的一个或多个压力传感器结合使用以感测和调节由外部吸取源提供的真空压力,从而控制自手术部位的流体流出速率并由此帮助努力提供良好的扩张和可视化。压力泵和压力传感器可包括在被构造成操作性地连接到流体管理系统100的控制系统的抽吸模块5201中,或者压力泵和压力传感器可以是构成流体管理系统100的主单元102的组成部分。在包括抽吸模块5201的使用的实施例中,将压力调节器5205插入到抽吸模块5201中引起压力调节器5205和抽吸模块5201的压力感测和气体泄放机构及集成式压力泵之间进行流体连接。在将压力调节器5205插入到抽吸模块5201中之后,用户可以将外部吸取源和自手术部位的流体返回管线手动连接到压力调节器5205的连接端口5202(例如,图53中所示的开口5315、5317以及图54-图55中所示的开口5415、5417)。
124.参考图53,压力调节器5205的第一示例性实施例包括三个腔室5307、5309、5311和柔性膜5313。第一腔室5307包括用于流体地连接到外部吸取源的开口或端口5315。第二腔室5309具有用于流体地连接到手术部位(经由一个或多个流体管线或管)的开口或端口5317。第三腔室5311包括一个或多个端口,用于连接到压力源(例如,图74中所示的抽吸模
块5201的压力源7449)和压力传感器(例如,图74-图75中所示的抽吸模块5201的压力传感器7451)。在所图示的实施例中,第三腔室5311具有用于连接到压力传感器的第一开口5319和用于连接到压力源的第二开口5321。
125.柔性膜5313定位成将第三腔室5311与第一腔室5307和第二腔室5309两者流体地隔离(即,密封),这允许流体管理系统100的压力源和压力传感器(它们连接到第三腔室5311的开口5319、5321)与自手术部位返回并移动通过第一腔室5307和第二腔室5309的生物危害性流体流体地隔离。在一些实施例中,疏水过滤器(未示出)设置在柔性膜5313和开口5319、5321之间,以提供进一步保护来防止流体接触流体管理系统100的压力源和压力传感器。例如,如果柔性膜5313撕裂或破裂,则疏水过滤器可以防止流体接触压力源和调节器。
126.第一腔室5307与第二腔室5309相邻,并且通过基本上竖直延伸的构件或壁5323和基本上水平延伸的构件或壁5361与第二腔室5309分离。壁5361包括将第一腔室5307流体地连接到第二腔室5309的开口5363。流体管理系统100的压力源被构造成在与壁5361的接合位置和与壁5361的一个或多个脱离位置之间移动柔性膜5313,其中当柔性膜处于接合位置中时,第一腔室5307和第二腔室5309彼此流体地隔离,并且其中当柔性膜5313处于脱离位置中的一者中时,第一腔室5307和第二腔室5309彼此流体地连接(经由开口5363)。当施加正压力以阻止跨越阀的流动时,开口5363之间的尺寸和间距防止膜5313由于通过开口的过度挤出所致而破裂。开口5363的尺寸和间距可基于用于柔性膜5313的材料的弹性和厚度而变化。一定数量的开口5363可以确保足够的流动,并且在一些实施例中,每个阀的任一侧上的开口的总组合表面积可大致相当于或大于期望附接到端口5315的管道的内部截面积。
127.流体管理系统100被构造成通过开口5319将压力提供给第三腔室5311,并且系统100被构造成通过以下方式来感测和调节第三腔室5311内的压力:经由压力传感器和开口5321感测压力并调制由压力源提供的压力以实现期望的压力设定点(例如,通过调制图74中所示的抽吸模块5201的压力源7449的气泵速度)。当腔室5309中存在比第一腔室5307中的压力或第三腔室5311中的压力中的较大者更大的正压力时(除了使柔性膜5313移位所需的力之外),系统100控制压力源引起柔性膜5313远离壁5361伸展。当第二腔室5309中存在比第一腔室5307和第三腔室5311中更大的正压力时(除了使柔性膜5313移位所需的力之外),流体能够使柔性膜5313移位并经由穿过壁5361和移位的柔性膜5313的孔5363产生腔室5307、5309之间的流体连接,使得期望的调节后的压力(例如,第一腔室5307中的压力或第三腔室5311中的压力中的较小者,除了使柔性膜5313移位所需的力之外)通过第二腔室5309的开口5317供应到手术部位。在标称状况下,第一腔室5307中存在的外部吸取源的压力低于压力调节器5205的其他腔室5309、5311的压力,第三腔室5311中的调节后的压力大于第二腔室5309中的压力,并且第三腔室5311中的调节后的压力可调整以允许调节通过第二腔室5309的开口5317供应到手术部位的压力。
128.当第一腔室5307和第二腔室5309流体地连接时,生物危害性流体从手术部位移动、通过开口5317进入第二腔室5309中、经由孔5363通过柔性膜5313和壁5361之间的开口并进入第一腔室5307中,并通过开口5315到达系统100或设施的废物收集部。当期望闭合阀并且阻止从手术部位的流动时,系统100在第三腔室5311中施加比在第二腔室5309中期望的最大压力(例如,由阀入口5317和手术部位之间的高度差的水柱重量引起的压力)和腔室
5307中的压力更大的正压力(除了使柔性膜5313移位所需的压力之外)。当腔室5311中的压力大于两个腔室5307和5309中的压力时(除了使柔性膜移位所需的压力之外),然后柔性膜5311以足够的力被保持抵靠壁5361以抵消其他系统压力,使得流动基本上停止。柔性膜5313将第三腔室密封而与第一腔室5307和第二腔室5309隔绝,以防止生物危害性流体移动到第三腔室5311中并接触系统100的压力源和/或压力传感器。
129.如果来自手术部位的压力(如可用于腔室5309中)是比由外部吸取源通过第一腔室5307供应的表压力、由系统100的压力源供应到第三腔室5311中的表压力和伸展柔性膜5313所需的压力更大的正压力,则供应到手术部位的调节后的真空压力可以等于由外部吸取源供应(通过第一腔室5307)的表压力或由系统100的压力源供应(到第三腔室5311中)的表压力和伸展柔性膜5313所需的压力中更大的正表压。即,如果来自手术部位的流率相对于外部压力源的流量容量(flow capacity)(通过第一腔室5307供应)可忽略不计,则供应到手术部位(通过腔室5309)的压力将是由外部压力源供应(通过第一腔室5307)的压力或由系统100的压力源供应(到第三腔室5311中)的压力和伸展柔性膜5313所需的压力中最接近绝对真空的压力。
130.在某些实施例中,可通过传递函数对伸展柔性膜5313所需的压力建模以确定系统100的压力源的压力设定点(供应到第三腔室5311中),该压力设定点是在第二腔室5309中实现供应到手术部位的期望的调节后的真空压力所需的。系统100可被构造成通过改变供应到第三腔室5311的压力来经由系统100的压力传感器和压力泵改变供应到手术部位的调节后的真空压力。而且,通过将由系统100的压力源提供给第三腔室5311的压力调节到比由外部吸取源供应的压力更大的压力,可将由外部吸取源供应(通过第一腔室5307)并供应到第二腔室5309的压力调节到更大的正压力。因为调节后的压力设定点是可变的,所以这也使得压力调节器5205能够用作简单的二通阀,以通过调节供应到第三腔室5311(具有大于第一腔室5307抑或第二腔室5309中的压力的压力)的压力来按需启用和禁用流动。
131.在某些实施例中,柔性膜5313被构造成使得由第三腔室5311中的压力源供应的压力引起柔性膜5313远离壁5361伸展并且引起供应到手术部位的调节后的真空压力比由系统100的压力源提供的压力大了约10 mmhg和约30 mmhg之间。柔性膜5313可以由例如氯丁橡胶、硅树脂、天然橡胶、丁腈橡胶、epdm、其他橡胶化合物或允许柔性膜在接合位置和脱离位置之间移动的任何其他材料制成。
132.压力调节器5205可具有壳体5325,该壳体至少部分地限定三个腔室5307、5309、5311并且包括开口5315、5317、5319、5321。壳体5325可以由例如聚碳酸酯、任何合适类型的塑料材料或任何其他合适材料制成。在某些实施例中,壳体5325具有包括第一腔室5307和第二腔室5309的第一部件5327以及包括第三腔室5311的第二部件5329,其中柔性膜5313定位在第一部件5327和第二部件5329之间以将第一部件5327的腔室与第二部件5329的腔室流体地隔离。第一部件5327、第二部件5329和柔性膜5313可以通过卡扣配合连接、粘合剂连接、一个或多个紧固件、激光焊接、超声波焊接、振动焊接或任何其他合适的手段而连接。
133.参考图53中所示的实施例,如果供应到手术部位的最低期望的调节后的压力是正表压力,则由外部压力源供应的压力可为正表压力或负表压力。如果期望的调节后的压力是负表压力(即,真空压力),则由外部吸取源供应的压力可能需要是比期望调节的最低表压力更负的(more negative)负表压力,因为由外部压力源供应的压力没有被感测到。换言
之,由外部压力源供应(通过第一腔室5307)的压力不需要是一致的(例如,不需要被调节并且可具有压力波动),条件是由外部压力源供应的最高表压力不是高于调节源(例如,手术部位)的期望的调节压力设定点的表压力。
134.虽然图53中所示的压力调节器5205的实施例对于调节提供被已知为比提供给手术部位的期望的调节后的真空压力更加负的真空水平的外部吸取源是有效的,但压力调节器5205(在图54-图73中示出)的第二实施例允许流体管理系统100调节提供未知或可变真空水平的外部吸取源并感测真空水平何时足以实现期望的调节设定点。参考图54和图55,压力调节器5205的第二实施例利用第一实施例(图53)的串联布置的两个阀。
135.参考图54,压力调节器5205的第二示例性实施例包括四个腔室5407、5409、5411、5412和柔性膜5413。第一腔室5407包括用于流体地连接到外部吸取源的开口或端口5415。第二腔室5409具有用于流体地连接到手术部位(经由一个或多个流体管线或管)的开口或端口5417。第三腔室5411包括用于连接到压力源(例如,图74中所示的抽吸模块5201的压力源7449)的一个或多个端口5419,并且第四腔室5412包括用于连接到一个或多个压力传感器(例如,图74-图75中所示的抽吸模块5201的压力传感器7451)的一个或多个开口5421。替代性实施例可以结合来自压力调节器5205的相同端口连接的传感器,以实现冗余或对压力源的改进的调节。
136.柔性膜5413定位成将第三腔室5411和第四腔室5412中的每一者与第一腔室5407和第二腔室5409两者流体地隔离(即,密封),这允许流体管理系统100的压力源和压力传感器与自手术部位返回并移动通过第一腔室5407和第二腔室5409的生物危害性流体流体地隔离。第一腔室5407与第二腔室5409相邻,并且通过竖直延伸的构件或壁5423和水平延伸的构件或壁5465与第二腔室5409分离。壁5465包括将第一腔室5307流体地连接到第二腔室5309的开口5467。柔性膜5413可从与壁5465的接合位置和一个或多个脱离位置移动,其中当柔性膜5413处于接合位置中时,第一腔室5407和第二腔室5409彼此流体地隔离,并且其中当柔性膜5413处于脱离位置中时,并且第一腔室5407和第二腔室5409彼此流体地连接(经由开口5467)。第三腔室5411与第四腔室5412相邻,并且通过竖直延伸的构件或壁5431和水平延伸的构件或壁5461与第一腔室5412分离。壁5461包括将第三腔室5411流体地连接到第四腔室5413的开口5463。柔性膜5413还可从与壁5461的接合位置和一个或多个脱离位置移动,其中当柔性膜5413处于接合位置中时,第三腔室5411和第四腔室5412彼此流体地隔离,并且其中当柔性膜5413处于脱离位置中时,第三腔室5411和第四腔室5412彼此流体地连接(经由开口5463)。
137.为了更好地示出图54中所示的压力调节器5205的实施例利用图53中所示的压力调节器的第一实施例的串联的两个阀,第一腔室5407被示为具有第一部分5408和第二部分5410,但第一部分5408和第二部分5410两者的两端的压力(如由外部吸取源供应)是相同的(因为不存在能够将第一部分5408和第二部分5410密封而彼此隔绝的屏障)。参考图55,压力调节器5205的第一阀5501利用外部吸取源(经由第一腔室5407的第一部分5408)来调节由流体管理系统的压力源供应的压力从第三腔室5411到第四腔室5412的移动。第二阀5503利用第四腔室5412中的压力(经由从第三腔室5411到第四腔室5412的压力移动)来调节由外部吸取源供应的压力从第一腔室5407的第二部分5410到第二腔室5409的移动,使得第二腔室5409中的压力基本上等于手术部位处的期望的调节后的真空压力。
138.参考图54和图55,第一腔室5407的第一部分5408处的压力引起柔性膜5413处于与壁5461的接合位置或脱离位置中。例如,如果由外部吸取源供应的真空压力比由系统100的压力源供应到第三腔室5411中的压力更加负,则柔性膜5413远离壁5461伸展,使得第三腔室5411和第四腔室5412得以流体地连接。当第三腔室5411和第四腔室5412流体地连接时,第四腔室5412中的压力基本上等于第三腔室5411中的压力。比较而言,如果由外部吸取源供应的真空压力比由压力源供应到第三腔室5411中的压力更加正,则柔性膜处于与壁5461的接合位置中以将第四腔室5412与第三腔室5411流体地隔离。
139.流体管理系统100经由系统100的所述一个或多个压力传感器来感测第四腔室5412内的压力,这允许系统100确定由外部吸取源供应的压力是否没有供应足够的真空压力来满足手术部位处的期望的调节后的真空压力。即,如果外部吸取源没有供应足够的压力来引起柔性膜5413远离壁5461伸展,则空气将经由系统100的小孔口或阀缓慢地从第四腔室5412中泄放出来,该小孔口或阀可不断地或定期地打开达到更加大的正表压以逐渐使第四腔室5412中的压力更接近这个更加大的正表压,并且系统100的压力传感器将感测到第四腔室5412中的压力不等于由压力源供应到第三腔室5411的压力,这将引起系统确定由外部吸取源供应的压力不足以满足手术部位处的期望的调节后的真空压力。如果有足够的时间泄放压力,则由系统100在第四腔室5412中感测到的压力可以用于确定第一腔室5407中存在的实际压力是否小于缓慢地放到第四腔室5412中的正表压力。如果系统100确定外部吸取源没有供应足够的真空压力,则系统100可被构造成通知用户调整外部压力源(例如,通过增加外部压力源的吸取设定、疏通通向外部压力源的管线、找到通向外部压力源的管线中的泄漏等),以确保足以将手术部位的真空压力向下调节到期望的调节后的真空压力。
140.参考图54和图55,压力调节器5205的第二阀5503利用由流体管理系统的压力源在第四腔室5412中供应的压力来调节由外部吸取源供应到第二腔室5409且因此供应到手术部位的压力的移动。即,系统100控制压力源引起柔性膜5413远离壁5465伸展以流体地连接第一腔室5407和第二腔室5409,使得通过第二腔室5409的开口5417将期望的调节后的真空压力供应到手术部位。然后,生物危害性流体从手术部位移动、通过开口5417进入第二腔室5409中、通过柔性膜5413和壁5465之间的开口5467并进入第一腔室5407中,并通过开口5415到达系统100或设施的废物收集部。柔性膜5413将第三腔室5411和第四腔室5412中的每一者密封而与第一腔室5407和第二腔室5409两者隔绝,以防止生物危害性流体接触系统100的压力源和/或压力传感器。
141.如果来自手术部位的压力(如可用于腔室5409中)是比由外部吸取源供应(通过第一腔室5407)的表压力和由系统100的压力源供应(到第三腔室5411中)的表压力两者以及伸展柔性膜5413所需的压力更大的正压力,则供应到手术部位的调节后的真空压力可以等于由外部吸取源供应(通过第一腔室5407)的表压力或由系统100的压力源供应(到第三腔室5411和第四腔室5412中)的表压力和伸展柔性膜5413所需的压力中更大的正表压。即,如果来自手术部位的流率相对于外部压力源的流量容量(通过第一腔室5407供应)可忽略不计,则供应到手术部位(通过腔室5409)的压力将是由外部压力源供应(通过第一腔室5407)的压力和伸展柔性膜5413所需的压力或者由系统100的压力源供应(到第三腔室5411和第四腔室5412中)的压力和伸展柔性膜5413所需的压力中最接近绝对真空的压力。
142.在某些实施例中,可通过传递函数对伸展柔性膜5413所需的压力建模以确定系统100的压力源的压力设定点(供应到第三腔室5411和第四腔室5412中),该压力设定点是在第二腔室5409中实现供应到手术部位的期望的调节后的真空压力所需的。系统100可被构造成通过改变供应到第三腔室5411和第四腔室5412的压力来经由系统100的压力传感器和压力泵改变供应到手术部位的调节后的真空压力。而且,通过将由系统100的压力源提供给第三腔室5411和第四腔室5412的压力调节到比由外部吸取源供应的压力更大的压力,可将由外部吸取源供应(通过第一腔室5407)并供应到第二腔室5409的压力调节到更大的正压力。因为调节后的真空压力设定点是可变的,所以这也使得压力调节器5205能够用作简单的二通阀,以通过调节供应到第三腔室5411和第四腔室5412(具有大于第一腔室5407抑或第二腔室5409中的压力的压力)的压力来按需启用和禁用流动。
143.在某些实施例中,柔性膜5413被构造成使得由第三腔室5411和第四腔室5412中的压力源供应的压力引起柔性膜5413远离壁5423伸展并且引起供应到手术部位的调节后的真空压力比由系统100的压力源提供的压力大了约10 mmhg和约30 mmhg之间,诸如比由压力源提供的压力大了约20 mmhg。柔性膜5413可以由例如氯丁橡胶、硅树脂、天然橡胶、丁腈橡胶、epdm、其他橡胶化合物或允许柔性膜在接合位置和脱离位置之间移动的任何其他材料制成。
144.在某些实施例中,第四腔室5412气动地附接到流体管理系统100的小孔口或阀,该小孔口或阀可不断地或定期地打开以将压力泄放到这样的表压力,即,该表压力大于或等于来自流体管理系统100的压力源抑或外部吸取源的期望的最大表压力。与流体管理系统的压力源的流率能力相比,打开的孔口或阀以可忽略的流率泄放压力,以确保第四腔室5412内部的压力是外部压力源的较大表压力或第二腔室5409中的期望的调节后的压力和伸展或打开柔性膜5413所需的任何附加力。
145.图54和图55中所示的压力调节器5205的实施例允许对流体管理系统100的压力源进行非润湿的、间接感测,以有助于确保外部吸取源具有足够的压力来调节到系统压力源的期望的真空压力,从而向下调节第二腔室5409和手术部位处的真空压力。能够经由具成本效益的单用途的压力调节器5205来间接感测由外部吸取源供应的压力是有益的,因为它使得系统100能够提示用户调整外部吸取源(通过增加外部吸取源的吸取设定、疏通通向外部吸取源的管线、找到通向外部吸取源的管线中的泄漏等),以确保足以将手术部位处的真空压力向下调节到期望的调节后的真空压力或以其他方式阻止系统的操作(如果调节后的真空压力水平将有害于来自系统的调节后的真空压力的预期使用的安全性或功效)。
146.图56至图64示出了图54和图55中所示的压力调节器5205的实施例。在所图示的实施例中,压力调节器5205包括壳体5625,该壳体至少部分地限定四个腔室5407、5409、5411、5412并且包括开口5415、5417、5419、5421。壳体5625可以由例如聚碳酸酯或任何其他合适的材料制成。参考图58,在某些实施例中,壳体5625具有包括第一腔室5407和第二腔室5409的第一部件5827以及包括第三腔室5411和第四腔室5412的第二部件5829。第一部件5827和第二部件5829可以是例如注射模制件。柔性膜5413定位在两个部件5827、5829之间以将第一部件5827的腔室5407、5409与第二部件5829的腔室5411、5412流体地隔离。在一些实施例中,压力调节器5205还可包括用于覆盖每个部件5827、5829的腔室的面向外部分的盖5833。第一部件5827、第二部件5829、柔性膜5413和盖5833可以通过卡扣配合连接、粘合剂连接、
一个或多个紧固件、超声波焊接、其组合或任何其他合适的手段而连接。在一些实施例中,压力调节器5205可包括一个或多个疏水过滤器5835以有助于保持流体管理系统100的压力源和压力传感器之间的细菌屏障。
147.参考图64,在某些实施例中,图56-63中所示的压力调节器5205可以与包括压力泵(例如,图74中所示的压力泵7449)和压力传感器(例如,图74-75中所示的压力传感器7451)的抽吸模块(例如,图74-75中所示的抽吸模块7404)结合使用以感测和调节外部吸取源,从而控制自手术部位的流体流出速度。当将压力调节器插入到抽吸模块中时,压力调节器5205可被构造成连接到接收机构6437(图64),该接收机构将用于第三腔室5411的端口5419自动连接到操作性地连接到抽吸模块的压力泵的端口6439。压力调节器5205和接收机构之间的连接还可将用于第四腔室5412的端口5421自动连接到操作性地连接到传感器和/或抽吸模块的空气泄放机构的端口6441。连接机构6437可包括通道6443,这些通道用于接收压力调节器5205的端部部分6445以允许压力调节器5205和抽吸模块之间进行牢固连接。在将压力调节器插入到抽吸模块5205中之后,用户可以将外部吸取源手动连接到用于第一腔室5407的端口5415并且将自手术部位的流体返回管线手动连接到用于第二腔室5409的端口5417。
148.图65至图73示出了图54和图55中所示的压力调节器5205的另一实施例。在所图示的实施例中,压力调节器5205包括壳体6525,该壳体至少部分地限定四个腔室5407、5409、5411、5412并且包括开口5415、5417、5419、5421。壳体5625可以由例如聚碳酸酯或任何其他合适的材料制成。在某些实施例中,壳体6525具有包括第一腔室5407和第二腔室5409的第一部件6829、以及包括第三腔室5411和第四腔室5412的第二部件6827。第一部件6827和第二部件6829可以是例如注射模制件。柔性膜5413定位在两个部件6827、6829之间以将第一部件6827的腔室5407、5409与第二部件6829的腔室5411、5412流体地隔离。在一些实施例中,压力调节器5205还可包括用于覆盖每个部件6827、6829的腔室的面向外部分的盖6633。第一部件6827、第二部件6829、柔性膜5413和盖6533、6633可以通过卡扣配合连接、粘合剂连接、一个或多个紧固件、超声波焊接、其组合或任何其他合适的手段而连接。在一些实施例中,压力调节器5205可包括一个或多个疏水过滤器6635以有助于保持流体管理系统100的压力源和压力传感器之间的细菌屏障。压力调节器5205还可以包括用于进行不透流体的连接的一个或多个密封构件6643(例如,o形环)。在某些实施例中,壳体6525具有夹持构件或手柄6547,该夹持构件或手柄有助于用户将压力调节器插入到流体管理系统100的抽吸模块或其他部件中以及从该抽吸模块或其他部件移除压力调节器。
149.参考图72和图73,在某些实施例中,图65-图71中所示的压力调节器5205可以与包括压力泵(例如,图74中所示的压力泵7449)和压力传感器(例如,图74-75中所示的压力传感器7451)的抽吸模块(例如,图74-75中所示的抽吸模块7404)结合使用以感测和调节外部吸取源,从而控制自手术部位的流体流出速率。当将压力调节器5205插入到抽吸模块中时,压力调节器5205可被构造成连接到接收机构7237,该接收机构将用于第三腔室5411的端口5419自动连接到操作性地连接到抽吸模块的压力泵的端口6439。压力调节器5205和接收机构之间的连接还可将用于第四腔室5412的端口5421自动连接到操作性地连接到传感器和/或抽吸模块的空气泄放机构的端口7241。连接机构6437可包括通道(未示出),这些通道用于接收压力调节器5205的端部部分以允许压力调节器5205和抽吸模块之间进行牢固连接
(例如,类似于如在图64中所示的实施例中所示)。在将压力调节器插入到抽吸模块5205中之后,用户可以将外部吸取源手动连接到用于第一腔室5407的端口5415并且将自手术部位的流体返回管线手动连接到用于第二腔室5409的端口5417。
150.图74和图75图示了可以与图1中所示的流体管理系统100和图53-图73中所示的压力调节器5205的各种实施例一起使用的抽吸模块5201的示例性实施例。抽吸模块5201可包括用于接收压力调节器5205的接收机构7437(例如,图64中所示的接收机构6437或图72中所示的接收机构7237)、集成式压力泵7449、用于将压力泵连接到压力调节器5205的一个或多个阀7452、7453以及具有一个或多个压力传感器7451的印刷电路板(pcb)7448。
151.集成式压力泵7449可被构造成经由压力调节器的开口5419(图54)将正压力或负压力供应到压力调节器5205。例如,泵7449可为包括两个端口(未示出)的气泵,并且抽吸模块5201可包括连接到压力调节器5205的开口5419和泵7449的端口的阀7452、7453(例如,三通阀)。泵7449的第一端口可被构造成将空气汲取进入泵7449中,并且泵7449的第二端口可被构造成将空气从泵中推送出来,这允许泵7449供应正压力和负压力两者以便进行压力调节和阻止流过阀。例如,如果将空气汲取进入泵7449中的端口保持对环境开放并且将空气从泵7449中推送出来的端口连接到基本上密封的器皿,则泵7449将在基本上密封的器皿内部建立正压力。相反,如果将空气从泵7449中推送出来的端口保持对环境开放并且将空气汲取进入泵7449中的端口连接到基本上密封的器皿,则泵7449将在基本上密封的器皿内部逐步建立真空压力。在该实施例中,阀7452、7453装有端口(ported),使得泵端口可以各自打开达到环境空气压力并且经连接以将压力供应到抽吸模块。控制系统的软件可调制阀7452、7453的状态以将泵构造成基于期望的阀状态和调节设定点将正压力或真空压力供应到系统。泵7449可以通过管道流体地连接到阀7452、7453。在其他实施例中,泵7449可被构造成将正压力抑或负压力供应到压力调节器,或者抽吸模块5201可包括用于将压力供应到压力调节器5205的单独的正压力泵和负压力泵。在某些实施例中,积聚器7450流体地定位在压力泵7449和压力调节器5205之间,以帮助调节由压力泵7449提供给压力调节器5205的压力。
152.所述一个或多个压力传感器7451可用于监测由压力泵7449供应到压力调节器5205的第三腔室5411(图54)的压力和在压力调节器5205的第四腔室5412(图54)内的压力两者。在某些实施例中,压力传感器7451可以通过气动管道操作性地连接到积聚器7450以监测供应到压力调节器5205的压力,并且压力传感器7451可以通过气动管道操作性地连接到压力调节器5205的开口5421(图54)以监测第四腔室5412内的压力。压力传感器7451允许流体管理系统100感测压力调节器5205的第四腔室5412(图54)内的压力,以确定由连接到第一腔室5407(图54)的外部吸取源供应的压力是否没有供应足够的真空压力来满足手术部位处的期望的调节后的真空压力。
153.参考图75,在某些实施例中,抽吸模块5201包括阀7554,该阀允许压力调节器5205的第四腔室5412(图54)不断地或定期地打开以将压力泄放到这样的表压力,即,该表压力大于或等于来自压力泵7449(图74)抑或外部吸取源的期望的最大表压力。与压力泵7449的流率能力相比,打开的孔口或阀以可忽略不计的流率泄放压力,以确保第四腔室5412(图54)内部的压力是外部压力源的较大表压力或供应到手术部位的期望的调节后的压力。
154.参考本技术中讨论的流体管理系统100的操作,控制系统可被构造成经由用户界
面110使用例如指令、图示、动画、视频和/或系统反馈来引导用户完成设置过程。参考图76和图77,在某些实施例中,系统100提示用户(经由用户界面110)选择将执行的外科科目和手术,这会引起系统100为手术设置默认操作参数以及那些参数的安全、可准许的调整范围(如存储在系统100的存储器中)。例如,系统100可提示用户选择“妇科”、“泌尿科”或“骨科”的科目;并且,如果用户选择“泌尿科”,则系统100可提示用户选择以下手术中的一者:“膀胱镜检查术(cystoscopy)”、“经皮肾镜碎石术(pcnl)”、“经尿道膀胱肿瘤电切术(turbt)”、“经尿道前列腺电切术(turp)”或“输尿管镜检查术(ureteroscopy)”。基于用户的选择,系统100然后可为手术设置默认操作参数(例如,压力控制模式或流量控制模式、设定点流体压力或流率、流体加温条件被启用或禁用、流体不足监测被启用或禁用等)。
155.在某些实施例中,系统100可将指令提供给用户以便将管道组安装到系统100的各种部件。例如,系统100可指导用户将包括流体调节器420(图4)和流体加温盒422(图4)的盒组件419(图4)插入到主单元102中,且然后将连接流体供应容器和盒组件419的管道放置或布线到泵212(图2)中或穿过该泵。系统100然后可提示用户指示是否将在手术期间执行流体不足监测。在某些情形下,系统100可能需要基于来自用户的关于正执行的手术类型的输入来执行流体不足监测。例如,如果用户选择手术性宫腔镜检查手术,则需要流体不足监测。对于其他妇科和泌尿科手术,流体不足监测可为可选的。如果用户没有选择手术性宫腔镜检查手术并且没有选择为所选手术启用流体不足监测,则系统100可指导用户刺入(spike)和悬挂流体袋。如果用户选择了手术性宫腔镜检查,或者选择了另一种手术并且选择为所选手术启用流体不足监测特征,则系统100可提示用户指示是否将在手术期间使用一种或多种流体类型以及为何种流体类型,如图78至图80中图示的。
156.在各种实施例中,系统100可被构造成根据流体类型来监测和显示流体不足。例如,在手术性宫腔镜检查中,外科医生可以基于正执行的手术类型和采用的手术器械而在外科手术期间利用多种流体类型。这些流体可以在渗透压、电解质含量和粘度方面不同。外科患者吸收的这些流体的量取决于流体压力、手术时间以及子宫内膜且重要的是子宫肌层中的静脉窦的手术破坏程度(如果宫内流体压力大于外科患者的平均动脉压)。因此,根据流体类型来监测和显示流体不足的能力增强了患者的安全性。
157.参考图78-图80,在用户指示将在手术期间使用的一定数量的流体类型之后,系统100可提示用户(经由用户界面110)选择将在手术期间使用的特定流体。系统100然后可为每种特定流体类型设定最大可允许不足极限(基于存储在控制系统的存储器中的信息或基于由用户输入的信息)。例如,针对低渗、不含电解质的流体的最大可允许不足极限可为1000 ml,并且针对等渗、包含电解质的流体的最大可允许不足极限可为2500 ml。系统100还可基于针对所选流体类型的流体不足之和来为手术设置最大总不足极限。例如,针对手术的最大总不足极限可为2,500 ml。
158.在各种实施例中,系统100将向用户提供用于悬挂流体供应容器的指令(经由用户界面110)。例如,关于由用户选择的第一流体类型,系统100可指导用户要使用哪些悬挂构件116(图1和图2),指导用户悬挂(一个或多个)流体供应容器且然后监测(一个或多个)悬挂构件116(图1和图2)以确认(一个或多个)流体供应容器设置在正确的悬挂构件上,或者提示用户指示将使用哪个(哪些)悬挂构件116(图1和图2)来保持(一个或多个)流体供应容器且然后监测(一个或多个)悬挂构件116的重量(例如,经由连接到悬挂构件的称重传感
器)以确定(一个或多个)流体容器何时设置在对应的悬挂构件116上。然后,系统100可以针对容纳第二流体类型的(一个或多个)流体容器来重复以上过程。
159.在手术期间,系统100可被构造成通过以下方式来监测和显示第一流体类型的流体不足水平(经由用户界面110):从泵送到手术部位的流体体积(例如,如通过监测流体供应容器的重量、监测泵212的泵转数的量等来确定)中减去自手术部位返回的流体量(例如,如使用不足盒2010和不足模块104或者通过监测从(一个或多个)构件116(图1和图2)悬挂的流体收集容器的重量等来确定)。
160.在某些实施例中,用户可以经由用户界面110切换到第二流体类型(例如,通过按压“改变流体类型”按钮或其他类似按钮)。系统100然后可指导用户闭合将用于第一流体类型的流体供应容器连接到泵212的(一条或多条)管道管线(例如,通过闭合(一条或多条)管道管线上的(一个或多个)夹子)。系统100还可指导用户从手术部位、身下铺巾和地板收集第一流体类型的所有残余流体。随后,系统100可指导用户流体地连接用于第二流体类型的流体供应容器的管道管线(例如,通过打开(一条或多条)管道管线上的(一个或多个)夹子)。在替代性实施例中,系统100可被构造成检测(经由控制系统的一个或多个处理器)用户何时切换到第二流体类型。在某些实施例中,管道管线可通过夹管阀自动流体地连接或断连。
161.在流体地连接用于第二流体类型的管道管线之后,用户可起始从系统100清除第一流体类型。在某些实施例中,用户将停止泵,从构成手术部位的体腔中取出镜和/或手术器械,并且允许体腔将第一流体类型引流到身下铺巾中。当完成时,用户将通过闭合相关联的(一个或多个)夹子将第一流体类型与泵流体地断连,通过打开相关联的(一个或多个)夹子将第二流体类型流体地连接到泵,引导镜和/或手术器械进入身下铺巾中并按压系统100的用户界面110上的“清除”或类似按钮,这将引起系统100泵送迫使第一流体类型离开盒组件419、流体流入管和镜和/或器械所必要的第二流体类型的体积。在某些实施例中,系统100可泵送引起清除所必要的第二流体类型,直到用户按压系统100的用户界面110上的“停止清除”或类似按钮。在清除已完成并且身下铺巾已清空之后,系统100将记录第一流体类型的流体不足,清空不足盒2010(图33-图34),且然后经由系统100的用户界面110向用户指示手术可以利用第二流体类型继续进行。可重复该过程,以在第一流体类型和第二流体类型之间来回改变。
162.在从系统100清除第一流体类型之后,系统100可开始监测和显示第二流体类型的流体不足水平。系统100可被构造成显示总流体不足、第一流体类型的不足和/或第二流体类型的不足。在某些实施例中,用户可能够经由用户界面100上的拨动开关或类似按钮来选择系统100是否显示总流体不足、第一流体类型的不足、第二流体类型的不足和/或其任何组合。
163.在一些实施例中,如果用户没有通知系统100流体改变(即,从第一流体到第二流体的改变),则系统100可停止泵212以暂停流体流动。例如,系统100可提示用户指示流体类型的改变是否为预期的,并且如果用户指示流体类型的改变不是预期的,则系统可以指导用户检查可能影响与其他流体类型相关联的悬挂构件上的重量的任何问题(例如,诸如袋发生泄漏或者夹子被打开或部分地打开)。如果用户指示流体类型的改变是预期的,则系统100可以指导用户起始对系统的清除(如上文所指示的)。用户可使用本文中所描述的过程
来多次切换流体。
164.在某些实施例中,最初指示将在手术中仅使用一种流体的用户可在手术期间通过以下方式经由用户界面110向系统100指示将使用第二流体:按压用户界面110上的“设置”按钮或图标或者类似按钮或图标,且然后按压“添加第二流体”按钮或图标或者类似按钮或图标。系统100然后可经由用户界面110指导用户悬挂第二流体类型、清除第一流体类型、记录第一流体类型的不足,并指导用户使用第二流体类型继续手术,如上文所指示的。然后,系统可以跟踪第一流体类型的不足、第二流体类型的不足和总不足。
165.在某些实施例中,一旦已将流体容器放置在悬挂构件116上,系统100就可引导用户完成管道安装过程。例如,如果利用了流体吸取和收集模块106,但没有利用不足模块104,则指令可以包括将自手术部位返回的流体管线、身下铺巾和地板(如果适用)连接到流体吸取和收集模块106。如果利用了不足模块104,则指令可以包括将不足盒2010插入到不足模块104中、将吸取源连接到不足盒2010(例如,经由真空端口2016)、以及将流体返回管道管线(自手术部位)连接到不足盒2010(例如,经由流体入口端口2012、2014)。如果利用了抽吸模块5201,则指令可以包括:将压力调节器5205插入到抽吸模块5201中、将吸取源连接到压力调节器5205(例如,经由图53中所示的端口5315或图54-55中所示的端口5415)以及将流体返回管道管线(自手术部位)连接到压力调节器5205(例如,经由图53中所示的端口5317或图54-55中所示的端口5417)。如果利用了流体流动和排空模块5101(图51),则指令可以包括将不足盒2010(或类似的单次使用的流体体积监测盒)插入到流体流动监测和排空模块5101中、以及将流体返回管道管线(自手术部位)连接到不足盒(例如,经由流体入口端口2012、2014)。
166.在管道安装过程之后,系统100可指导用户完成灌注过程。例如,系统100可指导用户将流体调节器420(图10)与在手术部位处正使用的手术器械流体地断连(例如,通过闭合管道上的将流体调节器420连接到手术器械的夹子)。系统100还可指导用户将流体供应容器中的至少一者流体地连接到泵212(例如,通过打开管道上的将该流体供应容器连接到泵212的夹子)。随后,系统100可指导用户起始对管道组的灌注(例如,通过按压“灌注”按钮或其他类似按钮),这将引起系统100将流体从所述至少一个流体容器泵送入流体调节器420中,直到系统100的压力传感器指示流体调节器420的流体出口腔室1054(图10)中的流体已达到一定的流体压力,和/或直到系统100的以流体出口腔室1054为目标的流体存在传感器(例如,图9中所示的流体存在传感器948)指示流体已达到一定水平。在系统100确定出口腔室1054中的压力或流体液位已足够之后,系统100可停止泵212。然后可通过反转泵212或打开螺线管阀(例如,图9中所示的螺线管阀951)来降低出口腔室1054内的流体压力,直到在流体调节器420的出口腔室1054中已实现期望的流体压力或流体液位。出于监测和显示所泵送的流体体积和流体不足(如果适用)的目的,灌注管道组所必要的流体体积可以是已知的,并且作为恒定偏移量而被加上。
167.参考图81,系统100可包括手术运行屏幕8101(经由用户界面110)。在所图示的实施例中,针对处于压力控制模式的系统示出了手术运行屏幕8101。在替代性实施例中,系统100可处于流量控制模式或挠曲控制模式。下文更详细讨论这些控制模式中的每一者。用户可通过按压屏幕8101底部处的导航条中的“播放”、“运行”或类似的图标或按钮8103来开始手术。用户还可经由运行屏幕8101上的调整控制/按钮来改变默认操作设置,诸如例如流体
压力设定点状况8105(如果系统100处于压力控制模式)、流体流率设定点状况(未示出—如果系统100处于流量控制模式)、以及不足警报水平8107(如果需要或已选择不足监测功能)。在某些实施例中,系统100可仅允许用户将默认操作设置改变为在手术的安全、可准许的调整范围8111内。手术运行屏幕8101还可允许用户通过使用开关8113来启用/禁用流体加温功能以及显示流体温度8112。
168.除了显示针对压力(或者如果系统100处于流量控制模式,则针对流量)的实际状况8115和设定点状况8105以及针对流体不足(如果适用)的实际状况8117和设定点状况8107之外,手术运行屏幕8101还可显示其他信息。例如,手术运行屏幕8101可显示到手术部位的泵送的流体流入量或体积8121、流体流率8123(如果系统100处于压力控制模式)和/或流体压力(未示出—如果系统100处于流量控制模式)。手术运行屏幕8101还可具有由图标或按钮组成的导航条,这些图标或按钮可以在手术之前或期间使用,诸如例如“设置”按钮8128、“帮助”或“故障排除”按钮8127、“通知”按钮8129、“维护”按钮8181、和/或“结束病例”或“结束手术”按钮8133。
169.在某些实施例中,按压“设置”按钮8128在用户界面110上调出设置屏幕(未示出),该设置屏幕允许用户调整、设定或启用系统100的其他特征。例如,参考图82,系统100可包括手术设置屏幕8202,该手术设置屏幕允许用户设置或调整系统100将针对手术所遵循的控制模式。在该实施例中,系统100可设置处于压力控制模式8204、流量控制模式8206或挠曲控制模式8208。在某些实施例中,系统100可默认为这些控制模式中的一者(例如,压力控制模式8204),但用户可以在手术设置屏幕8202中改变控制模式的类型。如果系统100处于流量控制模式8206,则系统改变泵212的速度以实现并保持用户选择的流体流率设定点(例如,如由用户在手术运行屏幕8101上设定),然而,条件是不能超过手术的最大可允许流体压力。换言之,改变流体压力以实现期望的流体流率。
170.如果系统100处于压力控制模式8204,则系统100改变泵212的速度以实现并保持用户选择的流体压力设定点(例如,如由用户在图81中所示的手术运行屏幕8101上设定),然而,条件是不能超过手术的最大可允许流体流率。换言之,改变流体流率以实现期望的流体压力。在一些实施例中,系统100可以对用户选择的流体压力设定点控制为系统处的期望的流体压力。在一些实施例中,系统100可以对用户选择的流体压力设定点控制为手术镜或器械处的期望的流体压力。参考图81a,出于人体工学原因(对应于操作图形用户界面110、从悬挂构件116悬挂流体供应容器、以及将部件(例如,本技术中描述的盒组件419和/或不足盒2010)插入到主单元102中),主单元102的高度h1可高于手术台8151。在某些实施例中,系统100可以在计算所需的系统压力时补偿由主单元102的高度h1和患者8153的假设或输入高度h2之间的差异h3造成的压头压力(head pressure)。即,系统100可以将补偿高度h3等同于压力调整量,且然后从手术镜或器械处的用户选择的流体压力设定点中减去该压力调整量。在一些实施例中,系统100可以对用户选择的流体压力设定点控制为构成手术部位的体腔中的期望的流体压力。在这些实施例中,除了基于参考图81a描述的补偿高度h3来计算压力调整量之外,系统100还可考虑到管道组的已知的限制因素和手术镜或器械的假设或校准的限制因素以确定所需的系统压力。因此,在一些实施例中,用户可选择系统100监测和显示(经由图形用户界面110)系统处的流体压力、手术镜或器械处的流体压力或构成手术部位的体腔的流体压力。
171.在内窥镜外科手术中,良好的、稳定的扩张和清晰的可见性对于程序化功效和效率很重要。虽然流体压力和流率是实现令人满意的手术部位扩张和可见性的主要因素,但一些用户可能对流体压力和/或流率(如受手术部位状况以及将流体递送到手术部位及从手术部位递送流体的手术器械和管道组的流体流入和流出限制因素的影响)如何影响扩张和可见性缺乏清晰的了解。参考图83,在示例性实施例中,系统100可替代地被设定到挠曲控制模式,该挠曲控制模式允许用户简单地通过进行扩张和可视化调整来实现期望的手术部位状况。即,在该模式下,用户既不关心系统100是以流体压力控制模式还是以流体流率控制模式操作,用户也不关心设定点压力或流率。代替地,用户可经由用户界面110将关于手术部位状况的反馈提供给系统100,并且系统100确定是以压力控制模式还是以流量控制模式操作以及确定针对手术的流体压力和/或流率的恰当设定点。
172.参考图83,如果用户选择挠曲控制模式,则系统100为手术设置默认流体压力设定点并且在用户界面110上呈现“扩张”控件或按钮8351、8352和“可视化”控件或按钮8353、8354。例如,用户可通过按压“+”(增加)按钮8351来增加扩张,或者可通过按压
“–”
(减小)按钮8352来减小扩张,并且用户可通过按压“+”(增加)按钮8353来增加可视化,或者可通过按压
“–”
(减小)按钮8354来减小可视化。用户界面110还可显示其他信息(类似于图81中所示的手术运行屏幕8101)。例如,用户界面110可显示到手术部位的泵送的流体流入或体积8321、流体流率8323和/或流体压力8324。用户界面还可显示流体温度8312并允许用户通过使用开关8313来启用/禁用流体加温功能。用户界面110还可具有由图标或按钮组成的导航条,这些图标或按钮可以在手术之前或期间使用,诸如例如“设置”按钮8328、“帮助”或“故障排除”按钮8327、“通知”按钮8329、“维护”按钮8331、和/或“结束病例”或“结束手术”按钮8333。
173.参考图84,当系统被设定到挠曲控制模式时(如8402处所示),系统100可默认为压力控制模式(如8404处所示)。在所图示的实施例中,扩张调整将系统置于流体压力控制模式并调整手术的压力设定点,且可视化调整将系统置于流体流率控制模式并调整手术的流率设定点。
174.如果用户调整扩张(如8406处所示),则系统100保持或转变到压力控制模式设置(如8408处所示),使得系统100可以调整手术的设定点压力以满足用户所期望的扩张。在各种实施例中,对流体压力设定点的扩张调整永远不会超过手术的最大可允许设定点压力。如果用户指示附加的扩张是期望的,但压力设定点处于最大可允许水平(如8410处所示),则系统100确定系统100的流率是否处于最大可允许流率(如8412处所示)。如果流率处于最大可允许流率,则系统100可以通知用户(经由用户界面110)系统100正以其用于手术的压力和流率极限操作(如8414处所示)。如果流率不处于最大可允许流率,则系统100可以指导用户打开镜流入和流出阀以增加流体流率(如8416处所示)并由此增加移动通过手术部位的流体。回到8410处所示的步骤,如果流体的设定点压力不处于最大可允许压力,则系统100确定系统100的流率是否处于最大可允许流率(如8418处所示)。如果流率处于最大可允许流率,则系统100可以指导用户通过以下方式来限制自手术部位的流体流出(如8420处所示):部分地闭合镜流出阀、部分地闭合流出管道上的夹子和/或在手术器械的流出管道中使用固定或可变限流器部件。如果流率不处于最大可允许流率,系统100可以增大压力设定点(如8422处所示)以增加扩张。
175.如果用户调整可视化(如8424处所示),则系统100保持或转变到流量控制模式设置(如8426处所示),使得系统100可以调整手术的设定点流率以满足用户所期望的可视化。在各种实施例中,对流体流率设定点的可视化调整永远不会超过手术的最大可允许设定点流率。如果流率设定点处于最大可允许水平(如8428处所示),则系统100确定系统100的流体压力是否处于最大可允许压力(如8430处所示)。如果压力处于最大可允许压力,则系统100可以通知用户(经由用户界面110)系统100正以其用于手术的压力和流率极限操作(如8414处所示)。如果压力不处于最大可允许流率,则系统100可以指导用户限制自手术部位的流体流出(如8432处所示),这允许系统100增加手术部位中的流体压力。用户可以通过例如以下方式来限制自手术部位的流出:部分地闭合手术器械的流出阀、部分地闭合流出管道上的夹子和/或在手术器械的流出管道中使用固定或可变限流器部件。回到8428处所示的步骤,如果流体的设定点流率不处于最大可允许流率,则系统100确定系统100的流体压力是否处于最大可允许流率(如8434处所示)。如果压力处于最大可允许压力,则系统100可以指导用户打开镜流入阀和流出阀(如8436处所示)以增加通过手术部位的流体流率。如果压力不处于最大可允许压力,则系统100可以增大流率设定点(如8438处所示)以增加可视化。
176.换言之,通过利用扩张控件8351、8352,用户将系统100置于压力控制模式并将手术的设定点流体压力调整直至手术的最大可允许水平,同时保持不能超过的最大可允许流率。通过利用可视化控件8353、8354,用户将系统100置于流量控制模式并将手术的设定点流体流率调整直至手术的最大可允许水平,同时保持不能超过的最大可允许流体压力。因此,系统100向用户提供对手术部位状况的更直观的控制,同时始终保持在手术的安全压力和流率内并显示实际的流体压力和流率。
177.参考图85至图87,系统100可包括推注特征或装置,出于程序化和/或可视化目的,该推注特征或装置用于临时增加流体压力和/或流率以保持或增加扩张和/或以保持或增加流体流动。推注特征或装置可包括:在包括图形用户界面的屏幕中的一者上的“推注”图标或按钮;气动、电动或无线脚踏板;和/或出于程序化和可视化目的允许外科医生临时增加流体压力和/或流率的其他致动装置。推注装置可操作性地连接到系统100的泵212(图2),使得外科医生可以通过泵212的操作来激活推注装置以临时增加压力或流率,并且使得在外科医生停用推注装置之后泵恢复到正常设置以便在设定点压力和流率下提供流体。因为外科医生操作推注装置,所以可以在需要时提供推注装置,而无需手动操作推注装置或使巡回护士与系统交互。推注特征还防止流体管理系统的设定点压力和/或流率仅因压力和/或流率的临时增加就改变。
178.推注装置可气动地、电动地或无线地(例如,经由蓝牙)与系统接口连接。推注装置可以由用户经由用户界面110来配置。例如,用户(经由用户界面110)可使用拨动开关8510在“接通(on)”和“断开(off)”状态之间改变推注装置。在某些实施例中,用户可选择使推注装置以瞬时模式8501操作,其中只要踩下脚踏板就维持增加。用户可替代地选择使推注装置以保持模式8503操作,其中踩下脚踏板以激活推注装置并再次踩下以停用推注装置。在另一实施例中,用户可选择使推注装置以定时模式(未示出)操作,其中踩下脚踏板以激活推注装置,并且系统100使推注装置保持处于激活状态历时期望的时间量。由推注装置引起的增加是针对流体压力还是流率设定点可取决于例如在推注激活的时候系统100是处于压
力模式还是流量控制模式。用户可选择使增加量等于设定的增量(例如,25 mmhg压力增加量或50 ml/min流率增加量)、超过设定点的百分比增加量(例如,20%)、或手术的最大可允许流体压力或流体流率。流体压力和流体流率的增加可受限于手术的最大可允许设定点。
179.本技术的推注装置是有益的,因为流体压力或流率增加量是已知的且安全的。即,用户设定增加量,实际的流体压力和流率显示在系统100的用户界面110上,并且增加量从不超过手术的最大可允许安全极限。另外,增加的持续时间是适当的,如由外科医生所确定和控制。而且,因为外科医生经由例如脚踏板来控制推注装置,所以推注装置不需要由巡回护士操作,并且推注装置不参与与系统的交互。
180.在替代性实施例中,系统100可包括用于临时增加或减小流体压力和/或流率的临时调整特征或装置,这允许用户临时增加或减小手术部位处的扩张和/或可视化。该调整特征或装置可包括与脚踏板或其他类型的致动装置结合的“临时”图标或按钮,该“临时”图标或按钮表示在包括图形用户界面的屏幕中的一者上的临时调整。在某些实施例中,致动装置包括(一个或多个)气动、电动或无线脚踏板,诸如具有摇杆动作的脚踏板或出于程序化和可视化目的允许外科医生临时增加或减小流体压力和/或流率的双脚踏板布置。调整装置可操作性地连接到系统100的泵212(图2),使得外科医生可以通过泵212的操作来激活装置以临时增加或减小压力或流率,并且使得在外科医生停用调整装置之后泵恢复到正常设置以便在设定点压力和流率下提供流体。因为外科医生操作调整装置,所以可以在需要时提供对压力和/或流率的临时调整,而无需手动操作装置或使巡回护士与系统100交互。调整装置可气动、电动地或无线地(例如,经由蓝牙)与系统接口连接,并且可以由用户经由用户界面110针对模式(瞬时或保持)和调整类型(固定、百分比或最大值)来配置。
181.在某些实施例中,系统100可包括用于在外科手术期间或之后打印出关于该手术的相关信息的打印机(例如,图2中所示的打印机218)。参考图88,在系统100跟踪手术的流体不足的情形下,用户可选择(经由用户界面110)在手术期间以设定的时间间隔(例如,每10分钟)自动记录和打印出流体不足。如图88中所图示的,用户界面110可包括切换按钮以接通或切断在手术期间以设定的时间间隔对流体不足的自动记录和打印。这种能力消除了对用户定期检查和手动记录或打印出流体不足信息的需要。在一些实施例中,用户可(经由用户界面110)请求在手术期间以设定的时间间隔记录流体不足并在手术结束时打印流体不足。在一些实施例中,用户可(经由用户界面110)请求显示来自先前时间间隔的不足信息。在一些实施例中,系统100可被构造成以不足监测的体积间隔打印流体不足(例如,单独地对于每个流体不足和/或对于总流体不足,每50ml的体积)。在一些实施例中,系统100可被构造成与其中系统100正被使用的设施的打印机自动通信(例如,经由有线、蓝牙或wifi)并在手术期间或之后或者在手术期间以设定的时间间隔打印相关信息,而不是打印到系统100自身的打印机。
182.系统100可以被构造成向用户提供在手术结束时打印出输出相关手术信息的能力,包括但不限于日期、手术类型、开始时间、结束时间、泵送的流体体积、流体不足(如果适用)、在设定的时间间隔的流体不足(如果适用)、平均流体压力、流体加温被启用/禁用、和/或平均流体温度。在一些实施例中,用户可能够选择打印不同的或附加的信息,包括但不限于设施信息、医师信息、患者信息、根据流体类型的流体不足(如果适用)、根据时间增量的流体不足(如果适用)、流体压力范围、流体流量范围、通知和警告列表、以及警报列表。附加
地,用户可选择经由系统100的蓝牙或wi-fi能力将相关的手术信息传输到设施的数据收集和/或记录保留系统。
183.为了避免由耗尽的流体供应袋引起的手术中断,系统100可记录被悬挂在每个悬挂构件116(图1)上的流体供应袋的初始重量、每个悬挂构件116上的流体供应袋的当前重量以及手术的当前流体流率。如果系统100确定流体袋可变得被耗尽,则系统100还可能够提供听觉和/或视觉指示器。当在流体袋将变得被耗尽之前的估计时间已下降到指定水平以下时,系统100还可提供听觉和视觉指示。
184.替代地,参考图89至图91,如果剩余的流体百分比(基于流体袋的初始体积)下降到指定水平以下,则用户可选择接收听觉和/或视觉指示器(经由用户界面110)。参考图89,系统100可以被设定到“时间”设置8902,当在袋变得被耗尽以前的时间量基于当前或平均流体流率而下降到预定的时间量(如8903处所示)以下时,该“时间”设置通知用户。替代地,系统100可被设定到“百分比”设置8904,当剩余的流体供应百分比下降到预定百分比(如8904处所示)以下时,该“百分比”设置通知用户。替代地,系统100可被设定到“体积”设置8906,当流体供应容器中剩余的流体体积下降到预定体积(如8907处所示)以下时,该“体积”设置通知用户。如果上文提到的水平设定得当,则用户(通常是巡回护士)有时间替换流体袋而不会中断手术。为了避免混淆并确保提高对警报状况的关注水平,用户可关闭声音或降低某些指示器、警告和警报的由开关或按钮8910和选择窗口8912提供的声音级别。然而,在一些实施例中,对于某些安全的临界警报来说,对警报/指示器的调整是不可能的。
185.参考图92和图93,示出了用于医师办公室环境(其中执行妇科和泌尿科手术)的流体管理系统9200的示例性实施例。系统9200包括主单元9202,该主单元可包括上文针对手术室环境中使用的流体管理系统100的主单元102所描述的任何或所有特征。例如,主单元9202可包括控制系统,该控制系统具有一个或多个处理器(未示出)以用于控制系统9200的各种部件(例如,用户界面、以及各种流体压力传感器、真空压力传感器、流体温度传感器、流体存在传感器等)。处理器可执行存储在系统100的存储器(未示出)中的指令(例如,软件代码)和/或执行由用户输入到系统中的指令。在一些实施例中,控制系统可具有用于连接到系统9200的位于远程的部件或模块的“蓝牙”能力以及用于连接到互联网的“wi-fi”能力。控制系统可包括触摸屏图形用户界面9210以用于从用户接收一个或多个输入并显示系统9202的信息(例如,关于流体不足、流体温度、流体压力、扩张、可视化等的信息)。
186.主单元9202还可包括用于流体加压的泵(例如,图2中所示的泵212)、用于提供吸取的真空泵、用于接收流体调节器(例如,图10中所示的流体调节器420)并感测移动通过流体调节器的流体的一种或多种特性(例如,流体存在、流体温度等)的流体调节组件(例如,图3中所示的流体调节组件315)、用于悬挂流体供应或收集容器9217(例如,袋、罐、器皿等)的悬挂构件9216(例如,钩)。在一些实施例中,主单元9202可包括用于接收加温盒(例如,图14-图18中所示的加温盒422)的加热组件(例如,图3中所示的加热组件314),使得系统可以被构造成用于在手术期间进行流体加温(如果适用)。控制系统的处理器可以与泵、传感器、流体调节组件、加热组件(如果适用)和悬挂构件9216电路连通;并且处理器可以被构造成控制这些部件。在某些实施例中,悬挂构件9216操作性地连接到称重传感器,使得控制系统可以监测流体容器9217的重量。
187.虽然用于手术室环境的系统100可包括包括流体调节器420和流体加温盒422的盒
组件419(图4),但是用于医师办公室的系统9200可包括或可不包括流体加温功能。在不包括流体加温功能的实施例中,参考系统100描述的流体调节器420也可与系统9200一起使用,但流体调节器420可包括连接器或管841(图8)、脉冲阻尼部件、或将入口腔室1053(图10)连接到出口腔室1054(图10)的通道(该通道是构成流体调节器420的组成部分),而不包括加温盒422。如果系统9200确实包括流体加温部件,则加温盒(例如,图14-图18中所示的加温盒422)可以是附接到流体调节器420的附件,使得系统9200可以执行流体加温。
188.与在流体管理系统100的情况下描述的基于流量的不足监测方法相比,系统9200可被构造成通过基于重量的方法来执行不足监测。基于流量的不足监测(如与系统100一起使用)适合手术室环境,这是由于与在那里执行的更长、更复杂的外科手术相关联的通常更高的流体体积使用所致。然而,基于流量的不足监测特征的复杂性和成本在医师办公室环境中可能是没必要的,因为在那里执行的外科手术通常更短并使用更少的流体。因此,系统9200可被构造成包括基于重量的不足监测。在某些实施例中,悬挂构件9216被构造成用于保持和监测流体容器9217的重量的双重目的。即,系统9200的处理器可以操作性地连接到悬挂构件9216的称重传感器,这允许系统9200监测流体容器9217的重量。至少一个流体容器9217用于将流体供应到手术部位,并且至少一个流体容器9217用于自手术部位返回的流体。系统9200监测悬挂构件9216的重量以确定到手术部位的流体流入体积(通过基于流体供应容器的重量)和自手术部位返回的流体流出体积(基于流体返回容器的重量)来计算流体不足,该流体不足是流体流入体积和流体流出体积之间的差异。系统9200可以被构造成监测和显示流体体积和流体不足。系统9200还可以被构造成在不足水平超过默认极限或由用户设定的调整后的限制的情况下提供通知或警报。
189.类似于本技术中描述的系统100,系统9200可被构造成经由用户界面9210使用指令、图示、动画和/或系统反馈来引导用户完成设置过程。例如,系统9200可首先提示用户选择将执行的外科科目和手术,这会引起系统9200为手术设置默认操作参数以及那些参数的安全、可准许的调整范围。
190.如果用户需要或选择不足监测,则系统9200可以提示用户指示将利用的流体类型并将为该流体设定最大不足极限。然后,系统9200可以指导用户悬挂流体供应容器并指示容器何时已放置在悬挂构件9216上(其中系统通过监测每个悬挂构件的重量来确认放置)。系统9200还可以指导用户将流体供应容器9217悬挂在特定的悬挂构件9216上(其中系统9200通过监测指定的悬挂构件的重量来确认放置)。系统9200然后可指导用户将流体返回管线连接到流体返回容器9217、将流体返回容器9217连接到吸取源(例如,主单元9200的集成式吸取源或外部吸取源)、且然后将流体返回容器悬挂在另一个悬挂构件9216上。当系统9200感测到流体返回容器9217已被悬挂时,它可将空的流体容器重量设定并记录为零,使得系统9200可以恰当地计算手术的流体不足。替代地,系统9200可以指导用户将流体供应容器9217放置在悬挂构件9216上,并且当系统9200感测到流体供应容器被恰当地放置时,系统9200可以指导用户准备并悬挂流体返回容器,如上文所讨论的。系统9200可以通过以下方式来为流体供应容器和流体返回容器中的每一者恰当地分配悬挂构件:在过程期间监测相应的悬挂构件的重量变化,或者通过在过程已完成之后比较悬挂构件上的相应重量。虽然系统9200可以容纳标准罐(这些标准罐可以容纳多达5 l的流体),但旨在用于在医师办公室环境中执行的手术的管道组的包装也可以用于所描述的流体收集功能。
191.如果不需要或不选择不足监测,则系统9200可以提示用户将流体供应容器9217放置在悬挂构件9216上、将使(一个或多个)流体容器与流体调节器(例如,流体调节器420)连接的管道放置或布线到泵212中或穿过该泵、并将流体调节器插入到主单元9202中。
192.在管道安装过程之后,然后,系统9200可以指导用户完成如上文参考系统100所描述的灌注过程。当灌注完成时,用户界面可以转变到手术运行屏幕(例如,手术运行屏幕8101),其中用户可开始和控制手术。
193.虽然本公开的各种发明性方面、概念和特征在本文中可被描述和图示为在示例性实施例中组合体现,但是这些各种方面、概念和特征可单独地抑或以各种组合及其子组合用于许多替代性实施例中。除非本文中明确排除,否则所有这种组合和子组合都旨在在本技术的范围内。更进一步地,虽然本文中可描述关于本公开的各种方面、概念和特征的各种替代性实施例——诸如替代性材料、结构、配置、方法、装置和部件、关于形式、装配和功能的替代方案等,但是这种描述并不旨在为可用的替代性实施例的完整或详尽列表,无论是目前已知的还是以后开发的。本领域技术人员可容易地将发明性方面、概念或特征中的一者或多者纳入本技术的范围内的附加实施例和用途中,即使这种实施例在本文中并未明确公开。
194.附加地,尽管本公开的一些特征、概念或方面在本文中可被描述为优选的布置或方法,但是除非明确如此陈述,否则这种描述并不旨在暗示这种特征是需要的或必要的。更进一步地,可包括示例性或代表性的值和范围以帮助理解本技术,然而,这种值和范围将不在限制性意义上解释,并且只有在如此明确陈述的情况下才旨在为临界值或范围。
195.此外,虽然各种方面、特征和概念在本文中可被明确地识别为发明性的或形成公开内容的一部分,但这种识别并不旨在为排他性的,而是可存在发明性方面、概念和特征,它们在本文中进行了充分描述,而没有照此明确识别或识别为特定公开内容的一部分,公开内容代替地在所附权利要求中陈述。除非明确如此陈述,否则示例性方法或过程的描述并不限于包括如在所有情况下都需要的所有步骤,呈现步骤的顺序也不被解释为需要的或必要的。权利要求中使用的词语具有其完整的普通含义,并且无论如何不受说明书中对实施例的描述。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1