一种具有磁定位功能的输尿管软镜及输尿管镜位姿估测系统
1.本技术涉及医疗器械技术领域,具体涉及一种具有磁定位功能的输尿管软镜及输尿管镜位姿估测系统。
背景技术:
2.输尿管肾介入手术中,操控输尿管软镜需要丰富的经验。病人的肾盏结构多管路分支错综复杂,甚至有血尿情况导致的视野不清晰,缺少术中实时定位内镜尖端位置、检测操作部位姿的设备。新手医生容易在操纵输尿管软镜时迷失方向、不清楚位姿及肾内管路形貌,以至发生位置卡顿,导致不能深入探索,也不能发现结石或者肿瘤。此外,术中由于不间断给肾内注射生理盐水,容易引起肾内压过大。尤其因缺乏导航的操控困难,手术时间会大幅延长。当手术时间超过1小时,病人进入icu重症监护并转为开放手术概率显著加大。
3.输尿管肾介入手术中遇到迷路、卡顿问题时,术者会使用x射线透视来重新找回他们的空间方位感,但是x射线仅能提供二维图像,使用这种方法仍然是很难找到输尿管软镜的先端部的精确位置。而且x射线带来的辐射对于病人及术者都是有害的,尤其对于长期从事手术的医生,其接收的辐射累计量极大。
4.另一方面,由于传统输尿管软镜系统,无法术中实时提供内镜尖端位置、操作部位姿。因为反馈机制缺乏,限制了泌尿专科手术机器人的开发和普及。
5.因此,无辐射、三维实时地显示输尿管软镜先端部和器官腔室相对位置的方法,将会具有极大的临床使用价值。然而输尿管软镜设计难度高,需要在3mm以内外径下,实现高图像分辨率、大工作通道,以及主动弯曲功能。具备这些特性才能使得医生可以探查整个肾集合系统,从而有效地对有上泌尿道病症的病人实施治疗。在外径仅3mm的电子输尿管镜上实现这样一种功能,存在较大工程技术挑战,如体积、电磁兼容、定位精度等各种问题。
技术实现要素:
6.本发明所要解决的技术问题在于克服现有技术的不足,公开了一种具有磁定位功能的输尿管软镜系统及其工作方法,能可以无辐射、三维实时地显示输尿管软镜先端部、弯曲部位姿及其与器官腔室相对位置,提高手术效率和成功率,减少术者及病人接受辐射的时间。可大幅降低泌尿科肾介入手术学习曲线难度,并促进泌尿专科手术机器人行业发展。
7.本发明实施例提供了一种具有磁定位功能输尿管软镜系统,包括磁定位输尿管软镜、体外校准模块和导航系统服务器。所述磁定位输尿管软镜、体外校准模块发分别连接导航系统服务器。
8.本发明实施例提供的具有磁定位功能的输尿管软镜,属于内窥镜医疗器械领域,包括镜管和与所述镜管相连的操作部,所述镜管包括设在其端部的先端部,所述先端部设有摄像组件,该摄像组件是图像传感器模组,且优选高分辨率图像传感器模组。所述镜管内设有贯通所述先端部的第一通道、第二通道和第三通道,所述第一通道内插装有照明导光束,所述第二通道内安装有1个或多个磁定位传感器。当第二通道内装有2个及以上的磁定
位传感器时,其中有一个传感器em1安装于第二通道先端部处,有另外一个传感器em2安装于第二通道弯曲部末端。记0<n<n,emn为第n个磁定位传感器。当n>2时,emn传感器间隔一定距离安装在软性工作部的中心轴线上。所述emn传感器可以获得空间绝对坐标emn(x,y,z)。尖端顶点中心相对em1传感器的空间坐标,通过工装治具进行校准获得,记为tiptoem1(x,y,z),旋转矩阵记为moe;尖端顶点中心坐标记为vextip=em1+moe(tiptoem1),用于标定。
9.所述第三通道为器械通道。操作部安装有方向交互模组,术者可以通过该方向交互模组,改变导航系统中的三维场景观察视角。
10.所述第二通道内的磁定位传感器具有空心结构,照明导光管分支二的照明光纤穿过该空心。照明导光管分支一的照明光纤穿过通道一。第二通道第一传感器轴线中心与第一通道摄像组件光轴中心距离约0.6mm,夹角10度。此时为配准最优,兼顾体积限制和系统坐标变换误差。
11.所述体外校准模块包括3个体外磁定位传感器。3个体外磁定位传感分别与导航系统服务器连接。体外磁定位传感器绝对空间坐标记为exemn,记0<n<n,emn为第n个体外磁定位传感器。其中体外磁定位传感器1、2分别分布在病人左右肾脏沿正中矢状面方向的腹部表面位置,坐标为exem1、exem2。体外磁定位传感器3放置在髋骨固定位置,坐标为exem3。
12.所述导航系统服务器与输尿管软镜、体外磁定位传感器、呼吸机和显示器连接。导航系统服务器具有位姿测算模块、图像融合模块、内镜图像实时显示模块、融合图像显示模块。其中,位姿测算模块测算输尿管软镜在人体里位姿。图像融合模块融合输尿管软镜位姿和术前ct模型,形成三维图像。内镜图像实时显示模块显示实时内镜视频。融合图像显示模块显示图像融合模块输出的三维图像。
13.安装于操作部的方向交互模组,使得医生可以方便地改变三维场景观察视角,从多角度寻找目标。此方向交互模组安装于操作部,而无需控制额外的鼠标来改变观察视角,主导医生可以自己独自完成,便捷、高效。
14.操作部的功能按钮中,包括一个配准确认按钮。
15.第二通道内安装有两个及以上的磁定位传感器时,根据所述传感器em1和所述传感器em2传回的定位信号,并依据镜体弯曲部的机械结构弯曲模型,导航系统服务器可以计算出当前弯曲部的形态,在导航系统服务器的显示屏上将镜管弯曲部的仿真形态图像和器官腔室三维模型融合展现,帮助医生确定当前镜子弯曲部的形态,为后续的操作提供指导。
16.另外,本发明还公开一种具有磁定位功能的输尿管软镜的操作方法:
17.初始配准:选择输尿管入口、顶点肾盏、底点肾盏三个位置作为参考点,进行初始配准。即将磁定位传感器em1与ct模型进行配准。在ct模型上用鼠标点选某个参考点,操控输尿管软镜使其尖端到达实物中对应的位置,并按下操作部的配准确认按钮,获得磁定位传感器em1绝对坐标refem1n。其中1≤n≤3,对应3个参考点。使用校对参数,获得输尿管软镜尖端绝对坐标refem1n=em1+moe(refem1n),即完成一次参考点的绝对坐标测量。针对每个参考点测量五次取平均值。同时通过ct模型与磁定位传感器em1实际测量的尺寸的比值,获取实物对ct模型的放大倍率系数s,用于校准肾内长时间灌注生理盐水引起的形变。将放大倍率系数s校正后的ct模型的三个参考点映射到世界空间,即将ct模型映射到术中世界空间。
18.位姿判断:术前ct器官提取的3d管腔模型,视为近似刚性边界。采用三阶贝塞尔曲
线进行拟合,具体的在没有约束边界的分段使用恒等曲率模型进行拟合,在有刚性边界的区域,使用器官边界轮廓缩进内镜弯曲部半径的位置作为镜体中心轴姿态估算值。
19.导航路径提示:在当前二维图像、及三维图像上,用连接当前位置与目标位置的中心线来提示前进方向。
20.位置卡顿提示:当第二通道内传感器em2反映镜体不断送进器官腔体内,且传感器em1位置变化小于5%时,提示可能出现位置卡顿。
21.运动干扰消除:导航系统服务器连接一组体表磁定位传感器,所述一组体表磁定位传感器至少有3个,其中的第一个体外磁定位传感器和第二个体外磁定位传感器分别分布在病人左右肾脏沿正中矢状面方向的腹部表面位置,第三个体外磁定位传感器放置在髋骨固定位置,作为参考原点,同时用于判断人体位姿变化,参考原点通常是病人搬移引起的。第一个体外定位传感器和第二个磁定位传感器相对于第三个体外定位传感器的位移变化中,与第二通道各定位传感器同频率且幅度更大的周期性位移作为运动干扰。有条件时,导航系统服务器接入呼吸机,在频域滤除与呼吸机同频率的运动干扰。
22.所述的具有磁定位功能的输尿管软镜通过光电接口和导航服务器连接,完成三维空间配准之后,安装有磁定位传感器的镜管部分的虚拟镜管图像和器官的三维模型融合,实时显示在导航系统显示器上。当术者对当前的三维场景观察视角不满意时,可以操作操作部上的方向交互模组,改变观察视角至合适。按下操作部的按键a,可展示先端部已经走过的路径,从而判断是否已经完全遍历器官腔室。按下按键b,可以标记当前先端部的三维位置,为之后重新找到此位置提供便利。
23.参考上述内容,第一方面,本发明提供了一种具有磁定位功能输尿管软镜系统,包括磁定位输尿管软镜、体外校准模块和导航系统服务器。所述磁定位输尿管软镜、体外校准模块发分别连接导航系统服务器。所述具有磁定位功能的输尿管软镜,包括镜管和与所述镜管相连的操作部,所述镜管包括设在其端部的先端部、蛇骨弯曲部和软性弯曲部。所述先端部不可弯曲,先端部设有摄像组件,其特征在于,所述镜管内设有贯通所述先端部的第一通道、第二通道和第三通道,所述第一通道内插装有照明导光束,所述第二通道内固定安装有1个或多个磁定位传感器。所述第三通道为器械通道。所述第二通道内的磁定位传感器具有空心结构,照明导光管分支二的照明光纤穿过该空心。照明导光管分支一的照明光纤穿过通道一。第二通道第一传感器轴线中心与第一通道摄像组件光轴中心距离约0.6mm,夹角10度。此时为配准最优。所述体外校准模块包括3个体外磁定位传感器。3个体外磁定位传感分别与导航系统服务器连接。3个体外磁定位传感器中的第一磁定位传感器和第二磁定位传感器分别分布在病人左右肾脏沿正中矢状面方向的腹部表面位置,3个体外磁定位传感器中的第三体外磁定位传感器放置在髋骨固定位置。所述导航系统服务器具有位姿测算模块、图像融合模块、内镜图像实时显示模块、融合图像显示模块。其中,位姿测算模块测算输尿管软镜在人体里位姿。图像融合模块融合输尿管软镜位姿和术前ct模型,形成三维图像。内镜图像实时显示模块显示实时内镜视频。融合图像显示模块显示图像融合模块输出的三维图像。
24.在一种可能的设计中,所述第二通道内设有定位信号传输电缆,所述定位信号传输电缆一端与所述磁定位传感器连接,所述定位信号传输电缆另一端与导航系统服务器连接。所述传输电缆以螺旋式缠绕在所述照明导光管上。
25.在一种可能的设计中,所述操作部连接有导光管,所述导光管外连接有导光插头部,所述导光插头部外接有信号传输套管,所述定位信号传输电缆通过所述的镜管、操作部、导光管、导光插头部、信号传输套管与所述的导航系统服务器连接。
26.在一种可能的设计中,第二通道内设有1个或多个磁定位传感器,在可安装的情况下,在第二通道内距离先端部660mm以内,可以增加更多的磁定位传感器。
27.在一种可能的设计中,当第二通道内装有2个及以上的磁定位传感器时,其中有一个传感器em1安装于第二通道先端部处,有另外一个传感器em2安装于第二通道弯曲部末端。
28.在一种可能的设计中,根据所述传感器em1和所述传感器em2传回的定位信号,并依据镜体弯曲部的机械结构弯曲模型,导航系统服务器可以计算出当前弯曲部的形态,并在导航系统服务器的显示屏上和器官腔室三维模型以3d形式展现。
29.在一种可能的设计中,导航系统服务器连接一组体表磁定位传感器,所述一组体表磁定位传感器至少有3个,其中3个磁体外定位传感器中的第一磁定位传感器和第二磁定位传感器分别分布在病人左右肾脏沿正中矢状面方向的腹部表面位置,3个磁体外定位传感器中的第三磁定位传感器放置在髋骨固定位置。
30.在一种可能的设计中,安装有磁定位传感器的第二通道先端部处安装有保护玻璃。
31.在一种可能的设计中,磁定位传感器和/或定位信号传输电缆外设有保护套管。
32.在一种可能的设计中,磁定位传感器的直径小于0.5mm。
33.在一种可能的设计中,操作部安装有方向交互模组,所述方向交互模组连接有方向交互信号电缆,另一端经所述导光管、导光插头部、信号传输套管与磁定位导航系统服务器连接。
34.在一种可能的设计中,操作部安装有检测弯曲手柄旋转角度的角度检测模块,所述角度检测模块连接有角度信号电缆,另一端经所述导光管、导光插头部、信号传输套管与磁定位导航系统服务器连接。
35.第二方面,本发明还提供了一种具有磁定位功能的输尿管软镜的使用方法,输尿管软镜包括镜管和与所述镜管相连的操作部,所述镜管包括设在其端部的先端部,所述先端部设有摄像组件,工作方法如下:
36.将所述的具有磁定位功能的输尿管软镜将多点磁定位、内镜实时视频传输给导航系统服务器。所述输尿管软镜、术前ct影像、体表传感器可以在导航系统服务器上完成三维空间配准。导航系统服务器显示安装有磁定位传感器的镜管部分的虚拟镜管图像和器官的三维模型融合后的实时图像。术者可以根据所述虚拟镜管图像和所述器官三维模型之间的相对位置关系,以及输尿管软镜的实时视频,控制镜体尖端到达手术部位。当导航系统服务器判断即将或已经出现位置卡顿,内镜不能行进时,将给出建议路线和警告提示。
37.当所述虚拟镜管图像相对于所述器官三维模型的相对位置在当前视角下无法清楚观察及准确判断时,术者可以操作操作部上的方向交互模组,改变导航系统显示的视角,以清晰准确的观察相对位置。
38.按下操作部的按键a,可展示先端部已经走过的路径,从而判断是否已经完全遍历器官腔室。按下按键b,可以标记当前先端部的三维位置,为之后重新找到此位置提供便利。
按下按键c,是配准确认按钮。
39.第三方面,本发明提供了一种输尿管软镜,包括:镜管,包括依次相接的先端部、弯曲部、插入部,其中,当所述镜管在向患者的输尿管插入时,所述先端部最先插进所述输尿管;所述先端部设置有第一磁定位传感器,所述第一磁定位传感器在磁场发生器所产生的交变磁场的作用下检测第一磁定位信号,并所述第一磁定位信号传输给导航系统服务器,使得所述导航系统服务器根据所述第一磁定位信号,定位所述第一磁场定位传感器在所述患者体内的位置;贯穿所述镜管的照明导光束,所述照明导光束的一端连接光源,另一端靠近或位于所述先端部,以便将所述光源发出的照明光传递到所述先端部;所述先端部设置有摄像模组,所述摄像模组用于在所述照明导光束所传递的光的作用下,捕获第一图像,并将所述第一图像传输给所述导航系统服务器,使得所述导航系统服务器通过图像显示器显示所述第一图像。
40.在一种可能的设计中,所述输尿管软镜还包括:与所述插入部远离所述弯曲部的一端设置有操作部,用于调整所述弯曲部的弯曲方向和弯曲角度,以调整所述先端部的在所述患者体内的位置。
41.在一种可能的设计中,所述操作部包括弯曲手柄,所述弯曲手柄内置有转动轮毂,所述转动轮毂连接第一牵引丝的一端,所述第一牵引丝的另一端穿过所述插入部,并穿过所述弯曲部内的蛇骨定位孔,与位于所述先端部的蛇骨末端连接;其中,当弯曲手柄转动时,带动所述转动轮毂转动,使得所述第一牵引丝带动所述先端部移动,以调整所述先端部在所述患者内的位置和姿态。
42.在一种可能的设计中,所述先端部设置有第一通道、第二通道、第四通道,所述第一通道、所述第二通道和所述第四通道并行设置;其中,所述第一磁定位传感器设置在所述第二通道内,所述照明导光束位于所述第一通道,所述摄像模组设置在所述第四通道内。
43.在一种可能的设计中,在所述先端部还设置有第三通道,所述第三通道用于连通进水阀口,以便通过所述进水阀口和所述第三通道对所述先端部所在区域进行灌注。
44.在一种可能的设计中,所述输尿管软镜还包括:与所述镜管连通的导光管,所述导光管远离所述镜管的一端设置有光电插头,所述照明导光束远离所述先端部的一端位于所述光电插头,以便通过所述光电插头从光源接收照明光。
45.在一种可能的设计中,所述弯曲部和所述插入部的相接处设置有第二磁定位传感器,所述第二磁定位传感器用于在所述交变磁场的作用下检测第二磁定位信号,并所述第二磁定位信号传输给所述导航系统服务器;所述导航系统服务器用于根据所述第一磁定位信号和所述第二磁定位信号,并结合所述弯曲部的机械结构弯曲模型,所述弯曲部的当前形态,并在通过显示屏上和器官腔室三维模型以3d形式展现。
46.在一种可能的设计中,所述第一磁定位传感器具有空心结构,所述照明导光束从所述第一磁定位传感器的空心结构透出;所述第一磁定位传感器的空心结构的轴线中心与所述摄像模组的光轴中心之间的距离为0.5
‑
0.7mm,夹角为10度。
47.第四方面,本发明提供了一种输尿管镜位姿估测系统,包括权利要求1
‑
7任一项所述的输尿管软镜和导航系统服务器;其中,所述导航系统服务器具有位姿测算模块、图像融合模块、内镜图像实时显示模块、融合图像显示模块;其中,所述位姿测算模块至少用于根据所述输尿管软镜中的磁定位传感器检测到的磁定位信号,测算输尿管软镜在人体里位
姿;图像融合模块用于融合输尿管软镜位姿和术前ct模型,形成三维图像;内镜图像实时显示模块用于根据所述输尿管软镜中摄像模组所捕获到的图像显示实时内镜视频;所述融合图像显示模块用于显示图像融合模块输出的三维图像。
48.在一种可能的设计中,所述系统还包括体外校准模块;其中,所述体外校准模块包括三个体外磁定位传感器;所述三个体外磁定位传感分别与所述导航系统服务器连接;其中,在所述系统的使用状态下,所述三个体外磁定位传感器中的两个分别分布在病人左右肾脏沿正中矢状面方向的腹部表面位置,另外一个放置在髋骨固定位置。
49.通过本发明提供的方案,可以无辐射、三维实时地显示输尿管软镜和器官腔室相对位置,从而辅助医生快速准确的到达病灶位置。
附图说明
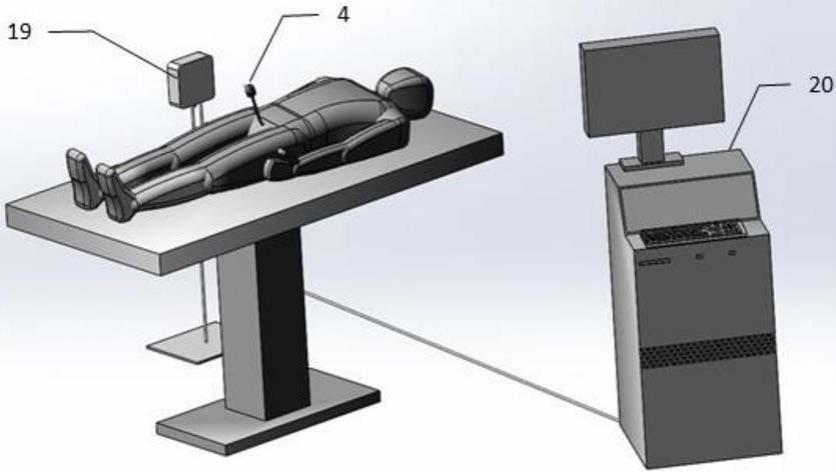
50.图1为本发明实施例提供的输尿管镜位姿估测系统应用环境示意图;
51.图2为本发明一种具有磁定位功能的输尿管软镜的结构示意图;
52.图3为图2所示输尿管软镜的先端部的横截面示意图。
具体实施方式
53.下列实施例仅用于说明本技术,而不应视为限制本技术的范围。实施例中未注明具体条件者,按照常规条件或制造商建议的条件进行。所用试剂或仪器未注明生产厂商者,均为可以通过市售购买获得的常规产品。
54.本发明针对输尿管肾介入手术中缺乏实时定位导航设备,输尿管软镜操控难的问题展开。随着近年来输尿管软镜技术的发展,已经成为了泌尿科微创诊疗的一种重要方法,在逐步替代传统经皮肾有创手术。仅我国每年就有数百万人进行输尿管肾介入微创手术,本发明有重要社会意义。
55.在进一步描述本技术具体实施方式之前,应理解,本技术的保护范围不局限于下述特定的具体实施方案;还应当理解,本技术实施例中使用的术语是为了描述特定的具体实施方案,而不是为了限制本技术的保护范围;在本技术说明书和权利要求书中,除非文中另外明确指出,单数形式“一个”、“一”和“这个”包括复数形式。
56.当实施例给出数值范围时,应理解,除非本技术另有说明,每个数值范围的两个端点以及两个端点之间任何一个数值均可选用。除非另外定义,本技术中使用的所有技术和科学术语与本技术领域技术人员通常理解的意义相同。除实施例中使用的具体方法、设备、材料外,根据本技术领域的技术人员对现有技术的掌握及本技术的记载,还可以使用与本技术实施例中所述的方法、设备、材料相似或等同的现有技术的任何方法、设备和材料来实现本技术。
57.本发明实施例中公开的是一种具有磁定位功能的输尿管软镜,主要用于观测肾脏、输尿管及击碎肾脏、输尿管内的结石等。
58.接下来,结合图1、图2和图3对本发明实施例提供的输尿管软镜及输尿管镜位姿估测系统进行示例说明。
59.本发明实施例提供的输尿管软镜包括镜管、操作部4、导光管5、导光插头部6,导光插头部6上设置有光电插头13,本发明实施例中的镜管包括插入部3、弯曲部2和先端部1,这
部分结构与传统输尿管软镜结构类似,不作过多阐述。本发明实施例中插入部3其直径小于3.5mm,其工作长度在650mm~750mm之间,所述镜管内设有贯通先端部1的第一通道15、第二通道16、第三通道17、第四通道18,可参见图2中。
60.本发明实施例,作为优选,第一通道15、第二通道16、第三通道17、第四通道18一直延伸至操作部4,第一通道15、第二通道16、第三通道17、第四通道18在先端部1内是相互独立的,而在弯曲部2、插入部3区域内,第一通道15、第二通道16、第三通道17、第四通道18可以是同一通道,也可以是相互分离的通道。
61.第一通道15内安装有照明导光束11,照明导光束11通常为玻璃纤维制成,照明导光束11由所述光电插头13插入,经导光管5、操作部4、插入部3、弯曲部2,直至达到先端部1,将医学上的冷光源作为本输尿管软镜的照明系统,这部分与传统的输尿管软镜结构原理类似,不作过多阐述。
62.第二通道16内,安装有1个或多个磁定位传感器,磁定位传感器的原理是,磁定位传感器在交变磁场中感应出感生电动势,所述的交变磁场由外部的磁场发生器产生。通过磁定位传感器产生的感生电动势信号,可以计算出磁定位传感器相对于磁场发生器的位置和姿态。磁定位技术相对于光学定位技术,可以定位柔性物体的位置,不需要考虑视线遮挡问题而且体积小巧,非常适合于本应用。所述的磁定位传感器可以传回每秒>=25帧的数据,真正实现了实时监测输尿管镜镜管位置。
63.本发明实施例中的磁定位传感器,其位置测量误差<1.2mm,方位测量误差<0.7。
64.当只安装有一个磁定位传感器时,磁定位传感器安装在先端部1,磁定位传感器连接有定位信号传输电缆,定位信号传输电缆刚好可以设置在第二通道16内,可以沿着所述的第二通道、操作部、导光管、导光插头部、信号传输套管与所述的导航系统服务器20连接。当安装的磁定位传感器数量>=2个时,其安装位置如图所示,其中磁定位传感器em1安装于先端部,磁定位传感器em2安装于弯曲部末端,其余的磁定位传感器可以分布于图中插入部3。所有的磁定位传感器的信号,均通过定位信号传输电缆传出。
65.作为优选,定位信号传输电缆在空间足够的情况下可采用衰减小和抗干扰能力强的屏蔽双绞线。
66.由于输尿管软镜经常需要消毒处理,为了防止消毒等操作对所述的磁定位传感器产生损伤等影响,所述第二通道16在先端部1的尽头处安装有保护玻璃,同时保护玻璃还起到了密封第二通道16的作用,起到密封防水、防尘的效果。
67.为了更好的保护磁定位传感器,所述磁定位传感器外和/或所述照明导光束11、定位信号传输电缆外套设有保护套管,本发明实施例中,优选是磁定位传感器、定位信号传输电缆均内置在保护套管内,保护套管是穿过第二通道16、操作部4、导光管5,并延伸出导光插头部6,长度为2m~3m,保护套管在图1至3中未示出。
68.本发明实施例中,所述导光插头部6连接有信号传输套管7,信号传输套管7用于保护定位信号传输电缆,定位信号传输电缆穿过该信号传输套管7连接有一个信号插头8,该信号插头8连接到导航系统服务器20上,安装在第二通道16内的磁定位传感器,将定位信号,经插入部3、操作部4、导光管5、导光插头部6、信号插头8传输至导航系统服务器20。另外,为了保护好信号插头8,在不使用的状态下,信号插头8上套接有消毒盖14。
69.第三通道17,也称为器械通道或钳道管,可以有多种作用,本发明实施例中其中一
种作用是作为灌注用,本发明实施例中的操作部4上设置有进水阀口9,该第三通道17是连通所述进水阀口9和先端部1,灌注液通过进水阀口9、第三通道17可直接从先端部1的端口排出;
70.手术时,通过进水阀口9灌注生理盐水等灌注液,经第三通道17直至先端部1的端口注入工作区域,可获得清晰的手术视野,部分碎石屑可随灌注液经手术配套的软镜导引鞘流出体外;
71.第四通道18,用于安装摄像模组,本发明实施例为电子输尿管软镜,其摄像模组由镜头和ccd/cmos图像传感器组成,摄像模组14将光学图像转化为电子信号,经由电缆传输,通过所述导光插头部6,进入导航系统服务器20进行信号处理,并将处理后的图像信号经视频电缆接入图像显示器,由图像显示器实时放映图像,由于这部分也是电子内窥镜的常用技术,也不作过多阐述,本发明实施例中先端部1上设置有保护摄像模组的保护镜片。
72.本发明实施例中的操作部4上设置有方向交互模组,如图,其实现方式可以为:触摸屏、滚轮,同时其周边还可以布置有按键1和按键2等功能按键,
73.另外,本发明实施例中还包括用于对弯曲部2进行弯曲调节的调向机构,调向机构包括弯曲手柄10,弯曲手柄10设在操作部4上,拔动弯曲手柄10,可相应调节和控制弯曲部2上下弯曲方向和弯曲角度,同时也同步调节和控制先端部1的观察方向和观察角度。弯手柄10,内置转动轮毂,通过转动轮毂上的牵引钢丝。钢丝穿过弯曲部2内部的蛇骨定位孔,与弯曲部2与尖端1处的蛇骨末端焊接固定。调节弯曲部2的调向及弯曲动作,当达到最佳观察方向时,可通过弯曲手柄10上的锁定钮,锁定弯曲部2的姿势,保持手术所需的弯曲角度和弯曲方向。由于弯曲手柄10、弯曲组件42、弯曲部2这些结构特征均是输尿管软镜中较为常用的结构,不作过多阐述。
74.另外,本发明实施例中导光插头部6上设置测漏接口12,测漏接口12是与导光管5连通的,用户在每次使用前、使用后,在清洗消毒前,往该测漏接口12,注入一定压力的气体,确认软镜不漏气、即符合密封标准后,才可使用或清洗消毒。
75.另外,参阅图1,本发明实施例提供的输尿管镜位姿估测系统包括图2所示的输尿管软镜、电磁定位传感器19、导航系统服务器20。
76.在一个例子中,电磁定位传感器19可为aurora ndi inc.磁定位接收器。
77.操作部4为输尿管软镜的操作部,可以作为电磁导航内镜手柄操作部。
78.导航系统服务器20硬件实现包括显示器、台车、工作站计算机、键盘等。其中位姿测算模块、图像融合模块、内镜图像实时显示模块、融合图像显示模块运行于工作站计算机上。显示器实时显示内镜视频和融合模块输出的三维图像。
79.以上所述的具体实施方式,对本技术的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本技术的具体实施方式而已,并不用于限定本技术的保护范围,凡在本技术的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1