站立辅助拖拽装置及其控制方法
1.本发明涉及医疗辅助器械技术领域,具体地,涉及站立辅助拖拽装置及其控制 方法。
背景技术:
2.我国人口老龄化和残疾使用用户数量的增加给日常护理工作带来了巨大的负担。 由于年龄的增长或其他疾病导致的下肢肌力下降是老年人和残疾人出现站立和行 走困难的主要原因,如果能够使用设备完成对使用用户的搬运,就可以减轻护理人 员的工作量。
3.公开号为cn 108217346 a的中国发明专利设计了一种缆绳收放装置,能采用 绞缆机、压绳机、导缆机、铺缆行走装置、储缆舱和张紧装置有序组合实现收 缆、放缆和储存缆绳功能,提高收放缆绳的效率。但该专利主要适用于工业领 域,整个机构结构复杂,操作繁琐,使用用户的学习成本比较大,并不适用于医 疗辅助康复设备领域。
4.公开号为cn 111285192 a的中国发明专利设计了一种绳索收纳架。该装置能 够对绳索进行缠绕收纳,在收纳时直接将绳索缠绕在两绕线杆上,并且可以对两 绕线杆之间的距离进行调节,使绳索的收纳更加方便快捷。但该装置无法自动完 成绳索的收放,自动化程度很低,导致操作过程过于复杂,仅凭使用用户无法一人 完成绳索的收放,增大了使用用户在使用过程中的难度。
5.公开号为cn 105883487 a的中国发明专利设计了一种绝缘绳自动收绳装置。该装 置克服了现有技术之不足,其能有效解决现有绝缘绳存在的在使用前解开绝缘绳时易 打结、绝缘检测不方便、不易发现绝缘绳中的断股缺陷和存在安全隐患的问题,结构 合理而紧凑,使用方便。但该装置无法实现绳索的自锁,在绳索收紧后无法对使用用 户进行固定,因而达不到减轻使用用户上肢用力的效果。
6.toshiharu mukai等人(toshiharu mukai,shinya hirano,et al, development of a nursing
‑
care assistant robot riba that can lift a human in its arms.in:international conference on intelligent robots and systems, pp.5996
‑
6001,2010)设计了一种名为riba的护理机器人,它能够利用双臂将使用 用户托举起来从而完成从病床到轮椅的转移,机器人在使用过程中仍然需要护理人员 的协助,护理人员通过监测环境来设定机器人的动作,而机器人则负责搬运转移使用 用户。该机器人虽然减轻了护理人员的体力劳动,但还需要护理人员的参与,没有提 升使用用户的自主活动能力。同时,机器人在将使用用户托举在半空中时,并没有使 用安全带将使用用户固定,搬运过程也存在一定的危险性。
7.milad geravand等人(milad geravand,peter zeno korondi,et al,humansit
‑
to
‑
stand transfer modeling towards intuitive and biologically
‑
inspiredrobot assistance.)在文章中提出了一种辅助站立机器人,可以协助下肢无力的使用 用户实现自主站立。milad geravand等人提出了自然站立和辅助站立的人体生物力学 模型,通过建立损失函数以及将人体的非线性生物力学特性和物理限制考虑其中,得 到了最佳的人体
辅助站立轨迹曲线,并在辅助站立机器人上进行了实验验证。该文提 出的机器人虽然配有安全带,但安全带并不提供助力,使用用户需要双手紧握扶手才 能得到助力,这无疑降低了使用用户使用过程中的舒适度。与此同时,该安全带并不 具有自动收紧以及固定人体的能力,需要护理人员加以协助,自动化程度较低,操作 繁琐,使用用户的自主活动受到了很大的限制。
8.ahmed asker等人(ahmed asker&samy f.m.assal(2019)a systematicapproach for designing a multi
‑
function sit
‑
to
‑
stand mobility assistivedevice based on performance optimization,advanced robotics,33:2,90
‑
105) 提出了一种基于并联操纵器的辅助装置,以协助下肢无力的使用用户进行各种下 肢活动。该装置通过在使用用户后背加装一个背部支撑带来保证使用用户在站立 完成之后不会后倾,没有在使用用户的臀部安装助力带,仅仅通过腋窝下的刚性 元件来对使用用户提供支撑,长时间使用会导致使用用户有较大的不舒适感。
9.guangming xiong等人(guangming xiong,jianwei gong et cl,developmentof assistant robot with standing
‑
up devices for paraplegic patients andelderly people,ieee/icme international conference on complex medicalengineering)设计了一种辅助截瘫使用用户以及老年人站立和转移的设备。该设备在 使用用户的腰部以及臀部分别加装了安全带和助力带,既保证了使用用户的安全,又 为使用用户提供了助力,舒适度和安全性都可以得到保证。但两个带子的装拆全部需 要人手动完成,操作较为繁琐,频繁使用会造成使用用户心理上的厌烦感,在提升使 用用户舒适性方面还需要加以改进。
10.fabio dallalibera等人(fabio dallalibera,yuko tsusaka et cl,analysisof velocity’s influence on forces and muscular activity in the context ofsit
‑
to
‑
stand motion assisted by an elderly care robot,internationalconference on intelligent robots and systems(iros))设计了一种利用机械臂来 辅助使用用户站立的设备。在使用设备时,使用用户首先穿上一种机械臂末端固定于 胸前的衣服,机械臂通过给衣服施加作用力来抬升使用用户,衣服起到了助力带和安 全带的双重作用。但是,在抬升过程中,衣服可能会给使用用户的腋窝以压迫感,降 低了使用用户的舒适度;同时,该设备必须在护理人员的操作以及监测之下才能完成 活动,这无疑降低了使用用户的自主活动能力。
11.经检索发现,专利文献cn211157123u,公开了一种辅助牵引装置,包括固定组 件和支撑组件,所述支撑组件与所述固定组件可拆卸连接,所述固定组件包括腰部 固定带,所述腰部固定带上设置有第一牵引带,所述支撑机构包括坐垫,所述坐垫 通过连接带与所述腰部固定带可拆卸连接,所述坐垫上设置有两个第二牵引带。当 患者进行康复治疗走路时,腰部固定带缠绕在患者的腰部位置,看护人员手持第一 牵引带,当患者将要歪倒时,看护人员通过第一牵引带对患者的腰部施加力,防止 患者歪倒;当需要将残疾人移动到轮椅上时,令患者坐在坐垫上,一人扶住患者的 腰部,另一人通过第二牵引带提着所述坐垫,使患者以坐姿的形式移动到轮椅上, 但是需要有护理人员配合才能进行,达不到便利的效果。
技术实现要素:
12.针对现有技术中的缺陷,本发明的目的是提供一种站立辅助拖拽装置及其控制 方法。
13.根据本发明提供的一种站立辅助拖拽装置,包括拖拽机构,所述拖拽机构包括收 绳机构、自锁机构、安装板、电控机构、绳索限位装置以及绳索,其中:
14.收绳机构、自锁机构、绳索限位装置设置在安装板上;
15.绳索卷绕在收绳机构上,绳索的一端自收绳机构伸出,穿过绳索限位装置和自锁机 构,并连接助力装置;
16.电控机构控制自锁机构自锁或解锁绳索,控制收绳机构收放绳索。
17.优选地,所述收绳机构包括收绳电机和卷绳轮,所述收绳电机与所述卷绳轮同轴设 置,所述收绳电机驱动所述收绳轮转动。
18.优选地,所述收绳电机上设有编码器。
19.优选地,所述自锁机构包括自锁电机、偏心轮、片弹簧组件、棘轮,其中:
20.片弹簧组件对棘轮组件产生作用力,使棘轮靠近挤压绳索,棘轮锁定绳索的运动;
21.所述自锁电机驱动偏心轮转动,偏心轮的远心端对棘轮产生作用力,并克服片弹簧 组件的作用力,使棘轮远离绳索,棘轮解锁绳索的运动。
22.优选地,所述绳索限位装置包括第一滚轮和第二滚轮,第一滚轮和第二滚轮均设置 在安装板上,第一滚轮和第二滚轮对绳索进行引导限位。
23.优选地,所述电控机构包括主控制器和电机驱动板,主控制器和电机驱动板固定在 同一块安装面板上。
24.优选地,所述棘轮设置在棘轮底座上,绳索穿过棘轮和棘轮底座侧板之间的间隙, 棘轮沿一个方向转动时,棘轮和棘轮底座侧板之间的间隙递减。
25.优选地,拖拽机构设置有两个,两个拖拽机构的绳索分别连接助力装置的一端。
26.根据本发明提供的一种站立辅助拖拽装置的控制方法,采用权利要求1
‑
8任一项所 述的站立辅助拖拽装置,所述方法包括如下步骤:
27.初始化步骤:电控机构判断自锁机构是否处于解锁位,如果自锁机构不处于解锁位, 电控机构控制自锁机构的偏心轮转动,直至偏心轮到达解锁位;
28.运动控制步骤:电控机构收到运动指令,控制收绳电机转动,判断收绳电机是否堵 转,若判断为未堵转则助力装置没有收紧,若判断为堵转则助力装置已经收紧,助力装 置收紧后自锁电机带动偏心轮转动至设定位置后停转,偏心轮到达自锁位,助力装置将 用户固定。
29.优选地,还包括脱离控制步骤:电控机构收到控制指令,自锁电机带动偏心轮转动 至设定位置后停转,偏心轮到达解锁位,绳索不再锁定,收绳电机反转释放绳索,用户 从装置中脱离。
30.与现有技术相比,本发明具有如下的有益效果:
31.1、本发明在站立及转移辅助设备使用过程中,机构将绳索收紧并锁紧从而为患 者提供助力;当设备将用户转移至指定位置后,机构将绳索解锁并释放从而保证助 力带脱离用户身体。
32.2、本发明考虑到使用用户大部分年事已高,身体虚弱,能够在搬运使用用户的 过
程中对使用用户的上肢提供助力,使得使用用户上肢不必过于用力就可以保证身 体的稳定。
33.3、本专利自动化程度较高,操作简便,容易上手,性能稳定可靠,提升了使用 用户在搬运过程中的舒适度。
34.4、本发明的站立及转移辅助设备能够辅助使用者以一种接近正常人站立的方式 站立起来,有助于使用用户的康复训练。在这一过程中,拖拽装置能牵引助力带为 用户提供助力,既减轻了用户上肢用力,又保证了用户的安全性。
附图说明
35.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、 目的和优点将会变得更明显:
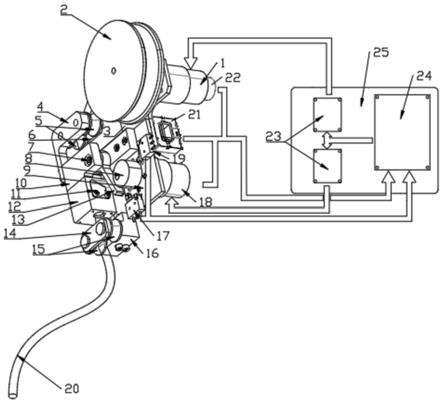
36.图1为本发明提供的用于站立辅助的绳索牵引拖曳机构的结构示意图;
37.图2、3、4分别为本发明提供的两个配合起来的用于站立辅助的绳索牵引拖曳 机构的正视、俯视、左视图。
38.图5为用户使用站立及转移辅助设备的示意图。
39.图6为本发明提供的用于站立辅助的绳索牵引拖曳机构的自锁机构的自锁状态 示意图。
40.图7为本发明提供的用于站立辅助的绳索牵引拖曳机构的自锁机构的解锁状态 示意图。
41.图8为本发明的站立辅助拖拽装置控制方法的流程图。
42.图中示出:
43.收绳电机1
44.卷绳轮2
45.收绳电机固定支座3
46.上支座4
47.上滚轮5
48.上固定片6
49.棘轮销7
50.偏心轮8
51.自锁电机固定支座9
52.棘轮底座10
53.片弹簧11
54.片弹簧底座12
55.棘轮13
56.下固定片14
57.下滚轮15
58.下支座16
59.下限位开关17
60.自锁电机18
61.上限位开关19
62.绳索20
63.电流传感器21
64.编码器22
65.电机驱动板23
66.主控制器24
67.安装面板25
68.安装板26
69.第一拖拽机构27
70.第二拖拽机构28
71.助力带29
72.安装区域30
具体实施方式
73.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人 员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技 术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于 本发明的保护范围。
74.如图1至图5所示,本发明提供了一种站立辅助拖拽装置及其控制方法,站立辅 助拖拽装置主要包括绳索部分、收绳机构部分、自锁机构部分以及电控部分四部分 组成。所述绳索部分一端穿过自锁机构部分,与收绳机构部分相连,另一端与用户 人体段的助力带相连。绳索部分,包括绳索、助力带;其中,绳索一端固定在收绳 机构的卷绳轮上,另一端分别从自锁机构部分中穿过,与用户人体段的助力带相连, 收绳机构的卷绳轮转动收紧绳索可将助力带对人体进行固定、站立时牵引助力。收 绳机构部分将绳索收束直至收紧力度,并使得用户身下的助力带与用户贴合,使得 用户在使用设备进行站立抬升时、助力带在绳索的牵引下提供助力作用;在使用用 户需要脱离设备时,收绳电机反转将绳索释放,助力带脱离用户身体。自锁机构部 分在收绳至一定牵引力度后将绳索锁紧,从而达到固定使用用户身体,减少上肢用 力的目的;利用自锁原理来保证绳索在固定人体后不会滑脱,从而保证使用用户的 安全。在自锁状态下,偏心轮会转动到近心端与棘轮手柄接触,从而保证棘轮可以 顺时针转动较大的角度。在设备抬升人体、辅助站立的过程中,棘轮沿顺时针方向 转动,从而会进一步地压紧绳索,使得绳索自锁、不产生滑动。自锁机构部分可以 保证绳索的张力始终小于棘轮与绳索之间的最大摩擦力,从而保证使用用户的安全。 自锁机构部分在使用用户需要脱离设备时可以将绳索解锁,使得使用用户可以从机 构中脱离;在解锁状态下,偏心轮会转动到远心端与棘轮手柄接触,从而限制棘轮 沿顺时针方向的转动,这时棘轮无法压紧绳索,助力带就可以脱离用户身体。电控 部分通过控制收绳机构部分以及自锁机构部分来保证整个机构工作流程的有序进 行。在机构上电的初始状态,主控制器首先判断自锁机构部分的偏心轮是否处于初 始位置,即解锁位;如果偏心轮不处于初始位置,电控部分便控制自锁电机转动直 至偏心轮到达解锁位;当偏心轮处于初始位置后,用户按动设备面板上的启动按钮, 收绳电机便开始对绳索进行收束,在这一过程中,电控部
分通过编码器的测速值结 合电流反馈信号判断收绳电机是否停转,如果停转则说明绳索已经拉紧、助力带已 经紧贴人体,此时主控制器控制自锁电机转动直至偏心轮触碰到上限位开关,即偏 心轮到达自锁位;当使用用户需要脱离设备时,按动设备面板上的解锁按钮,自锁 电机带动偏心轮转动直至到达解锁位置,偏心轮触碰到下限位开关、自锁电机停止 转动,此时绳索不再锁定,收绳电机反转释放绳索,用户可从机构中脱离。电控部 分能够利用双闭环直流系统来控制收绳电机的转矩以及绳索释放的长度。在绳索卷 收逐渐贴近人体的过程中,电流反馈环中的电流传感器能够检测收绳电机电枢电流 的大小,当电枢电流大于参考值时,收绳电机两端的电压会降低来保证电枢电流不 至于过大而对收绳电机造成损伤,也可以保证收绳电机的转矩始终小于设定的阈值, 从而防止绳索因张力过大对使用用户的身体造成损伤,保证设备使用过程中使用用 户的舒适性。电流反馈环还能与位置反馈环以及编码器相结合,通过位置值、电流 值以及编码器的测速值判定收绳电机是否发生堵转以及绳索是否收束到了一个合 适的长度,进而判定绳索是否已经收紧。在绳索释放时,位置反馈环能够实时监测 绳索释放的长度,与电流反馈环结合,保证使用用户脱离设备的行动不受到影响。 同时,位置反馈环记录收绳电机的初始位置以及绳索锁紧时收绳电机的位置,当释 放绳索时,收绳电机反转直至卷收前的初始位置,保证卷绳轮放出绳索的长度与开 始时卷收进去的绳索长度保持一致。绳索牵引拖曳机构能够多个机构配合进行使用, 站立及转移辅助设备上就将两个绳索拖曳机构进行了配合使用。绳索的两端分别与 两个绳索拖曳机构相连。在使用过程中,两个机构的收绳、锁紧、解锁、放绳等一 系列动作完全独立,互不干扰,与单一的机构相比,两个配合的机构提升了绳索卷 收以及释放的效率。
75.本发明主要与一种站立及转移辅助设备配合使用。站立及转移辅助设备能够辅 助使用者以一种接近正常人站立的方式站立起来,有助于使用用户的康复训练。首 先,设备将使用用户从坐姿调整至站姿,在这一过程中,所述收绳机构部分能将绳 索自动卷收至合适长度,既能紧贴使用用户,又不会给使用用户造成压迫感;收绳 过程结束之后,所述自锁机构能够将绳索锁紧,绳索就能起到固定身体的作用;之 后,设备将使用用户转移至指定位置;当设备将使用用户从站姿调整为坐姿后,使 用用户按动按钮可以将绳索解锁,同时收绳电机反转,绳索自动放出,使用用户就 可以从设备中脱离出去。
76.进一步说明,根据本发明提供的用于站立辅助的绳索牵引拖曳机构,包括绳索、电 控部分、收绳机构部分以及自锁机构部分;所述绳索部分包括:绳索以及助力带,绳 索的一端从卷绳轮中伸出,穿过自锁机构部分,与助力带相连。在转移使用用户的 过程中,助力带紧贴人体,起到固定使用用户的作用。助力带材质较软,宽度较宽, 有利于减小压强,提升搬运过程中使用用户的舒适度。同时,其表面带有凹凸的花 纹,能够增大摩擦,使得助力带不易滑脱,提升了搬运过程中的安全性。
77.所述收绳机构部分包括:收绳电机1、收绳电机固定支座3、卷绳轮2,编码器22; 其中:所述收绳电机1固定在收绳电机固定支座3上;所述卷绳轮2与电机输出轴固 联,收绳电机1可以带动卷绳轮转动从而对绳索进行收束;所述编码器22工作轴与收 绳电机1转子固联。所述收绳机构部分能够将绳索收束直至助力带与使用用户身体贴合; 在助力带将使用用户固定后收绳电机停转,终止收绳;在使用用户需要脱离设备时,收 绳电机反转将绳索放出。
78.所述自锁机构部分包括:自锁电机18、自锁电机固定支座9、偏心轮8、上限位开 关19、下限位开关17、片弹簧11、片弹簧底座12、棘轮13、棘轮底座10、棘轮销7、 上支座4、下支座16、上滚轮5、下滚轮15、上固定片6、下固定片14,电流传感器21 其中:所述自锁电机18固定在自锁电机固定支座9上;所述偏心轮8与自锁电机输出 轴固联,自锁电机18可以带动偏心轮8转动;所述上限位开关19以及下限位开关17 固定在自锁电机固定支座9上,当偏心轮8转动到两个限位开关限定的位置时,分别对 应机构的自锁与解锁;所述片弹簧11固定在片弹簧底座12上,片弹簧11可以在机构 需要自锁时将棘轮13顶起至指定位置,从而达到机构自锁的效果;棘轮13通过棘轮销 7固定在棘轮底座10上,棘轮13可以绕棘轮销7转动;所述上滚轮5与下滚轮15分 别安装在上支座4以及下支座16上,并通过上固定片6、下固定片14进行固定。所述 自锁机构部分能够在收绳至指定长度后将绳索锁紧,从而达到固定使用用户身体,减少 上肢用力的目的;在使用用户需要脱离设备时将绳索解锁,使得助力带不再锁紧用户。 自锁机构可以利用自锁原理来保证绳索在固定人体后不会滑脱,从而保证使用用户 的安全。在自锁状态下,偏心轮会转动到近心端与棘轮手柄接触,从而保证棘轮可 以顺时针转动较大的角度。在设备抬升人体过程中,绳索会有沿箭头1滑动的趋势, 同时会带动棘轮13沿顺时针方向转动,从而导致棘轮13与棘轮底座10之间的空 隙越来越小,棘轮13会进一步地压紧绳索,使得绳索自锁、不产生滑动。自锁机构 可以保证绳索的张力始终小于棘轮13与绳索之间的最大摩擦力,从而保证使用用 户的安全。
79.如图7所示,在解锁状态下,偏心轮8远心端与棘轮手柄接触,使得棘轮手柄无法 沿顺时针转动较大的角度,棘轮13无法压紧绳索,从而可以保证在使用用户需要脱离 设备时,绳索可以不受限制地沿箭头1滑动。
80.所述电控部分包括:1个主控制器、2个电机驱动板;其中:电机驱动板、编码器22、 电流传感器21、下限位开关17、上限位开关19分别连接到主控制器上,主控制器负责 接收限位开关17、上限位开关19、电流传感器21以及编码器22发出的信号,并通过 对电机驱动板发出信号来实现对收绳电机以及自锁电机的控制。所述电控部分能够:在 整个电控部分刚一上电就判断自锁机构部分的偏心轮8是否处于初始位置,即解锁位; 如果偏心轮8不处于初始位置,电控部分便控制自锁电机18转动直至偏心轮8到达解 锁位置;通过设备面板上的启动按钮来控制收绳电机1的转动,通过编码器的测速值 结合电流反馈信号判断收绳电机1是否停转,如果停转则说明助力带已经紧贴人体; 收绳电机停转后自锁电机18便开始转动,使得偏心轮8开始转动,偏心轮触碰到上限 位开关19自锁电机18随即停止转动;当使用用户需要脱离设备时,能够通过按钮控制 自锁电机18转动使得偏心轮开始转动,偏心轮触碰到下限位开关17自锁电机18随即 停止转动,此时绳索不再锁定,收绳电机1反转释放绳索,助力带就可以脱离用户身体。 电控部分能够控制绳索的收放以及自锁与解锁。
81.主控制器通过接收一定时间间隔内编码器22发出的脉冲数量来判断收绳电机1的 转速,通过接收编码器22的脉冲数量总和来判定收绳电机1的位置,通过接收限位开 关17、上限位开关19的信号来判定偏心轮8的目前处于何种状态,通过接收电流传感 器21的信号大小来判断收绳电机1的转矩大小;主控制器根据这些反馈对电机驱动板 发出信号来控制收绳电机1与自锁电机18的转动。
82.当收绳电机1停转时,编码器22在给定的时间间隔内发出的脉冲为零,主控制器根 据此信号来判定收绳电机1已经发生了堵转。时间间隔的大小会对装置的性能表现产生 影
响,过大会导致装置反应缓慢,过小则有可能发生误判。在本装置中,优选确定的时 间间隔为0.1s。
83.电控部分能够利用双闭环直流系统来控制收绳电机的转矩以及绳索释放的长度。在 绳索卷收逐渐贴近人体的过程中,电流反馈环中的电流传感器21能够检测收绳电机1 电枢电流的大小,当电枢电流大于参考值时,收绳电机1两端的电压会降低来保证电枢 电流不至于过大而对收绳电机造成损伤,也可以保证收绳电机1的转矩始终小于设定的 阈值,从而防止绳索因张力过大对使用用户的身体造成损伤,保证了设备使用过程中使 用用户的舒适性。电流反馈环还能与位置反馈环以及编码器22相结合,通过位置值、 电流值以及编码器22的测速值判定收绳电机1是否发生堵转以及绳索是否收束到了一 个合适的长度,进而判定绳索是否已经收紧。在绳索释放时,位置反馈环能够实时监测 绳索释放的长度,与电流反馈环结合,保证使用用户脱离设备的行动不受到影响。同时, 位置反馈环还能够记录收绳电机的初始位置以及绳索锁紧时收绳电机的位置,当释放绳 索时,收绳电机1反转直至卷收前的初始位置,保证卷绳轮2放出绳索的长度与开始时 卷收进去的绳索长度保持一致。
84.电控部分可以提升整个装置的自动化程度,提升使用用户操作整个装置的便利性。 电控部分能够控制装置自动完成收绳、锁紧、解锁、放绳等一系列动作,将使用用户从 这些繁琐的操作中解放出来,为提升使用用户的自主活动能力带来帮助。
85.本发明的使用步骤为:首先,使用用户靠近站立及转移辅助设备,双脚放在踏板 上,保证自己的臀部能够被助力带兜住。随后,使用用户按动设备面板上的启动按 钮,设备将使用用户逐渐从坐姿调整为站姿,同时,卷绳轮2开始转动直至助力带完 全紧贴使用用户,收绳电机1随即停转。主控制器根据编码器的测速值结合电流反馈 信号判断收绳电机1发生了堵转,自锁电机18开始转动直至偏心轮8停在自锁位上, 此时助力带就可以安全地将用户固定在设备上。当设备将用户搬运到指定位置后,用 户按动解锁按钮,设备将用户从站姿逐渐调整为坐姿,自锁电机18开始转动直至偏心 轮8停在解锁位,同时收绳电机1反转,绳索逐渐地从卷绳轮2中放出,用户就可以 从设备中脱离出去。
86.更为详细地,装置通电,电控部分判断偏心轮是否处于解锁位,如果偏心轮不处于 解锁位,电控部分控制自锁电机转动直至偏心轮到达解锁位;用户按动面板上的启动按 钮,收绳电机开始转动,主控制器通过编码器的测速值结合电流反馈信号判断收绳电机 是否堵转,堵转则说明助力带已经收紧。助力带收紧后自锁电机开始带动偏心轮转动, 直至触碰到第一限位开关后停转,偏心轮到达自锁位,此时助力带就可以将用户固定在 设备上;当用户需要脱离设备时,按动面板上的解锁按钮,自锁电机开始带动偏心轮转 动,直至触碰到第二限位开关后停转,偏心轮到达解锁位,此时绳索不再锁定,收绳电 机反转释放绳索,用户可从设备中脱离。
87.本发明具有结构简单,操作容易,自动化程度高,性能稳定可靠等优点,既提升 了使用用户的舒适度,也减轻了护理人员的工作量,具有较大的现实意义。
88.在本申请的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、
ꢀ“
竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示 的方位或位置关系,仅是为了便于描述本申请和简化描述,而不是指示或暗示所指的装 置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本申请的 限制。
89.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上 述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改, 这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的 特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1